A Framework for Combining Set Variable Representations Christian Bessiere Toby Walsh
advertisement

Proceedings of the Tenth Symposium on Abstraction, Reformulation, and Approximation
A Framework for Combining Set Variable Representations∗
Christian Bessiere
Zeynep Kiziltan, Andrea Rappini
CNRS
University of Montpellier, France
bessiere@lirmm.fr
DISI
University of Bologna, Italy
{zeynep,rappini}@cs.unibo.it
Abstract
with multiset variables. In (Law, Lee, and Woo 2009), for
instance, cardinality and variety bounds are combined with
subset bounds (Kiziltan and Walsh 2002).
In this paper, we present a formal framework with which
we can study and compare such combined representations
of sets and multisets. We define combination operators, notions of consistency between representations, and of propagation. Using this framework, we launch a systematic study
of representations. Due to lack of space, we focus only on
set variables but our results are directly applicable to multisets. Our study provides insight into existing combined
representations, as well as new and potentially useful representations. Moreover, it uncovers a number of important relations. For example, we prove that the lengthlex representation for set variables (which combines lexicographic ordering and cardinality information and is designed to work well
with cardinality and ordering constraints) is incomparable
to a representation for set variables that deals with the lexicographic ordering and cardinality bounds either separately
or simultaneously. As a second example, we prove that the
hybrid representation of (Sadler and Gervet 2008) (which
combines lexicographic, subset and cardinality bounds) is
tighter than one that looks at pairs of bounds separately, but
looser than one that looks at all the bounds simultaneously.
We demonstrate the value of our framework via theoretical and experimental results. We show that, whilst it can
be intractable in general to combine representations, some
combinations are powerful but polynomial to reason about.
For example, for some common set constraints, reasoning
with subset and cardinality bounds simultaneously is not
more difficult than reasoning about them separately (as Oz
and Cardinal do). Our experiments demonstrate that combining another representation with subset bounds can result
in a tight approximation. Hence, one of our conclusions is
that developers of solvers should consider more tightly integrating subset bounds with representations like cardinality
and lengthlex.
Set and multiset variables are important modelling constructs
in constraint programming. Several representations have
been proposed for set and multiset variables, often based on
combining together different representations. In this paper,
we provide a formal framework with which we can study
many existing combinations of representations and compare
their strength. In addition, our framework opens the door to
interesting new combinations, as well as to the construction
of propagators with well defined properties. We illustrate the
value of the framework via both theoretical and experimental
results.
1
Toby Walsh
NICTA and University of New South Wales
Australia
toby.walsh@nicta.com.au
Introduction
Many constraint satisfaction problems can be modelled naturally using set variables. Consider for instance the social golfers problem (prob010 at CSPLib.org) which partitions a set of golfers into foursomes. Another example
is the ternary Steiner problem from combinatorial mathematics which requires to find triples of integers from 1
to n (Lindner and Rosa 1980). Several constraint toolkits therefore provide set variables as modelling and solving
construct since the earliest constraint solvers (Puget 1992;
Gervet 1994).
An important issue regarding a set variable is how to represent it. As an extensional representation of the domain
of a set variable is exponential, more compact representations are typically used which approximate the full powerset
domain. The first representation proposed for set variables,
which is still used in many solvers, is subset bounds. The
lower bound is the set of definite elements, whilst the upper
bound is the set of possible elements. Unfortunately this is
a weak approximation. To better approximate domains, new
representations have been proposed that combine together
different representations (e.g. (Müller 2001; Azevedo 2007;
Gervet and van Hentenryck 2006; Sadler and Gervet 2008;
Malitsky, Sellmann, and van Hoeve 2008)). For instance,
set constraint programming in Oz (Müller 2001) and the
Cardinal set solver (Azevedo 2007) both reason with subset and cardinality bounds on the set. Similar issues arise
2
Background
A set variable takes as value a subset of a universe U =
{1, . . . , n}. The domain may contain up to 2n values.
The representation R of a set domain is typically given by
bounds that limit the domain to an interval in a (partial or
total) order of the subsets of 2U . The approximation DR (S)
∗
The first author has been partially funded by the EU project
ICON (FP7-284715).
c 2013, Association for the Advancement of Artificial
Copyright Intelligence (www.aaai.org). All rights reserved.
25
lbM L (S2 ) = {} and ubM L (S1 ) = ubM L (S2 ) = {3}
and the constraint c ≡ |S1 ∩ S2 | = 2. We have
c[S1 ]M L = {{1, 2}, {1, 2, 3}, {1, 3}, {2, 3}}, hence BC
on minlex would update lbM L (S1 ) to glbM L ({{1, 2},
{1, 2, 3}, {1, 3}, {2, 3}, {3}}) which is {1, 2}, and
ubM L (S1 ) to lubM L ({{1, 2}, {1, 2, 3}, {1, 3}, {2, 3}})
which is {2, 3}. Similarly for S2 .
of a domain is given by a lower and upper bound, lbR (S)
and ubR (S).
The subsetbounds representation (denoted SB) uses the
partial order over subsets (Puget 1992; Gervet 1994). The
lower bound contains the definite elements, and the upper
bound contains the possible elements. Given a variable S,
DSB (S) = {s | lbSB (s) ⊆ s ⊆ ubSB (s)}.
T Given a
set of sets A S⊆ 2U , we define glbSB (A) = a∈A a and
lubSB (A) = a∈A a.
Another approach is to consider lower and upper bounds,
lbT and ubT within a total ordering ≤T on 2U . As before,
DT (S) = {s | lbT (S) ≤T s ≤T ubT (S)}. In minlex (denoted M L), the total ordering ≤M L is defined as follows:
we list elements in each set from smallest to largest and
then order lists obtained in this way lexicographically. In
lengthlex (denoted LL (Gervet and van Hentenryck 2006)),
the total ordering ≤LL first orders sets by size, breaking
ties with ≤M L . In the hybrid domain of (Sadler and Gervet
2008), the total ordering ≤maxlex is defined as follows: we
list elements in each set from largest to smallest and then
order lists obtained in this way lexicographically. Given a
set of sets A ⊆ 2U , we define glbT (A) = min≤T (A) and
lubT (A) = max≤T (A).
A third approach is based on the size or value of a set. We
illustrate this with the cardinality representation (card) but
we could also consider cost of the set. In card, DC (S) =
{s | lbC (S) ≤ |s| ≤ ubC (S)}. Given a set of sets A ⊆ 2U ,
we define glbC (A) = min({|a| | a ∈ A}) and lubC (A) =
max({|a| | a ∈ A}).
3
Framework
To present our framework, we focus on combining two representations. When using two representations simultaneously, a desirable property is that both representations agree
on their bounds. Given representations R1 and R2 , we write
DR1 R2 (S) for DR1 (S) ∩ DR2 (S).
Definition 2 (Synchronization) Given a variable S, and
two representations R1 and R2 , then R1 is synchronized
with the representation R2 on S iff:
• lbR1 (S) = glbR1 (DR1 R2 (S));
• ubR1 (S) = lubR1 (DR1 R2 (S));
S is synchronized for R1 and R2 iff R1 is synchronized with
R2 and R2 is synchronized with R1 .
Example 3 Consider a variable S with U = {1, 2, 3} represented using R1 = minlex with lbM L (S) = {1, 2}
and ubM L (S) = {3}, and using R2 = SB with
lbSB (S) = {} and ubSB (S) = {1, 3}. We have
DM L (S) = {{1, 2}, {1, 2, 3}, {1, 3}, {2}, {2, 3}, {3}} and
DSB (S) = {{}, {1}, {3}, {1, 3}}. The intersecting domain
DM LSB (S) = {{1, 3}, {3}}. For minlex to be synchronized with subsetbounds, its lower bound lbM L (S) must be
glbM L (DM LSB (S)) = {1, 3}. Similarly, for subsetbounds
to be synchronized with minlex, its lower bound lbSB (S)
must be glbSB (DM LSB (S)) = {3}.
Example 1 Consider a variable S whose domain D(S) =
{{1}, {1, 2}, {3}}.
Given a representation R among
subsetbounds, minlex, lengthlex and card, the domain
DR (S) is defined as follows:
• DSB (S): lbSB (S) = {} and ubSB (S) = {1, 2, 3};
• DM L (S): lbM L (S) = {1} and ubM L (S) = {3} ;
• DLL (S): lbLL (S) = {1} and ubLL (S) = {1, 2} ;
• DC (S): lbC (S) = {1} and ubC (S) = {2}.
We consider two different ways to propagate a combined
representation. In the weak sense, we apply bound consistency on each representation independently and synchronize
them. In the strong sense, we ensure the lower and upper
bounds of a representation are bound consistent on their synchronized domains. Given two representations R1 and R2 ,
the weak combination will be denoted by R1 + R2 and the
strong combination by R1 × R2 .
We now give an uniform definition of bound consistency (BC). Given representation R, variables S1 , . . . , Sn
and a constraint c(S1 , . . . , Sn ), we denote by c[Si ]R the set
{si | c(s1 , . . . , si , . . . , sn ) ∧ sj ∈ DR (Sj )∀j ∈ 1..n}.
Definition 3 (Bound consistency on R1 + R2 ) Given
variables S1 , . . . , Sn , and a constraint c(S1 . . . , Sn ), Si is
bound consistent on c for R1 +R2 iff Si is synchronized for
R1 and R2 , Si is BC on c for R1 and Si is BC on c for R2 .
Definition 1 (Bound consistency on R) Given a representation R, variables S1 , S2 , . . . , Sn , and a constraint
c(S1 . . . , Sn ), we say that Si is bound consistent on c for R
iff lbR (Si ) = glbR (c[Si ]R ) and ubR (Si ) = lubR (c[Si ]R ).
c(S1 . . . , Sn ) is bound consistent for R if for every i ∈ 1..n
Si is bound consistent on c for R.
Example 4 Consider a variable S with U = {1, 2, 3} represented using R1 = minlex with lbM L (S) = {1} and
ubM L (S) = {3}, and using R2 = subsetbounds with
lbSB (S) = {1} and ubSB (S) = {1, 2, 3}, and the constraint c ≡ |S| = 2. The variable S is BC on c for SB
but is not for minlex. Enforcing BC on c for minlex would
update the bounds of minlex so that their cardinality is 2,
hence we get lbM L (S) = {1, 2} and ubM L (S) = {2, 3}.
With these domains, S is not synchronized for minlex and
SB, because SB requires that 1 belongs to S. Ensuring synchronization, ubM L (S) is further updated to {1, 3}. Now, S
is BC on c for minlex + SB.
When a constraint c(S1 . . . , Sn ) is not bound consistent, we
can enforce bound consistency on c to reduce the search
space. This increases lbR (Si ) and decreases ubR (Si ), i ∈
1..n until bound consistency holds, without discarding solutions of c. When no such lower and upper bounds exist (i.e.,
when DR (S1 )×. . .×DR (Sn ) does not contain any solution
of c), we say that bound consistency has failed on c.
Example 2 Consider two variables S1 and S2 with U =
{1, 2, 3} represented using R = minlex with lbM L (S1 ) =
26
Definition 4 (Bound consistency on R1 × R2 ) Given
variables S1 , . . . , Sn and a constraint c(S1 . . . , Sn ), Si is
bound consistent on c from R1 to R2 iff:
Proof:
Let c(S1 , . . . , Sn ) be a constraint. Suppose
BC does not fail on c for R1 × R2 . Definition 4
tells us that BC on R1 × R2 requires that for every Si , lbR1 (Si ) = glbR1 (c[Si ]R1 R2 ), lbR2 (Si ) =
glbR2 (c[Si ]R1 R2 ), ubR1 (Si ) = lubR1 (c[Si ]R1 R2 ), and
ubR2 (Si ) = lubR2 (c[Si ]R1 R2 ). These bounds are synchronized because c[Si ]R1 R2 ⊆ D(Si )R1 R2 . These bounds are
also obviously BC for R1 and BC for R2 , so BC for R1 +R2 .
Therefore, if BC does not fail for R1 × R2 , then R1 + R2
cannot fail, as in the worst case, it will converge on the same
bounds as for R1 × R2 . • lbR1 (S) = glbR1 (c[Si ]R1 R2 );
• ubR1 (S) = lubR1 (c[Si ]R1 R2 );
Si is bound consistent on c for R1 ×R2 iff Si is synchronized
for R1 and R2 and Si is bound consistent from R1 to R2 and
vice versa.
Example 5 Consider two variables S1 and S2 with U =
{1, 2, 3} represented using R1 = minlex with lbM L (S1 ) =
lbM L (S2 ) = {1} and ubM L (S1 ) = ubM L (S2 ) = {3}, and
using R2 = card with lbC (S1 ) = lbC (S2 ) = ubC (S1 ) =
ubC (S2 ) = {1}, and the constraint c ≡ {2, 3} ⊆ S1 ∪ S2 .
Both S1 and S2 are synchronized for minlex and card, and
c is BC for both representations. Hence, S1 and S2 are BC
on c for minlex + card. However, S1 and S2 are not BC
on c for minlex × card. We have c[S1 ]M LC = {{2}, {3}},
hence BC on minlex × card would update lbM L (S1 ) to
glbM L ({{2}, {3}}) which is {2}. Similarly for S2 .
4
When representations can represent the same domains, a
stronger relation based on the values pruned can be defined.
Let fc denote the stronger relation in terms of failure as in
Definition 5, and pc denote in terms of pruning. We have:
Theorem 3 Given two representations R1 and R2 , a constraint c:
• R1 fc R2 =⇒ R1 pc R2
• R1 ≡pc R2 =⇒ R1 ≡fc R2
Pruning based definition would be useful when comparing
for instance R1 × R2 and R1 + R2 where the R1 and R2 are
isomorphic. As an example, consider a unary constraint c.
We have (R1 ×R2 ) ≡pc (R1 +R2 ) if one of R1 and R2 is defined by a total ordering. This is because, the bounds of that
ordering must satisfy c and be synchronized with the other
representation at the same time. Consequently, any value
pruned by R1 × R2 will necessarily be pruned by R1 + R2 .
By Theorem 3, we have (R1 ×R2 ) ≡fc (R1 +R2 ). A counter
example when neither representation is defined by a total ordering is given in Section 5. Pruning based definition can
also give us more information when (R1 × R2 ) ≡fc (R1 +
R2 ). As an example, consider the binary not equals constraint c ≡ S1 6= S2 . We have (SB×card) ≡fc (SB+card)
but (SB × card) pc (SB + card), as we will show later in
Section 8.
In the rest of the paper, for the specific representations
that we consider, we either have R1 fc R2 or R1 ∼fc R2
for all constraints c (except Section 8 where we compare
representations based on a specific constraint). We therefore
consider only the failure based definition and stick to the
notation .
Comparing Combinations
Informally, one representation is stronger than another if
bound consistency reasoning with the first representation is
more powerful than with the second.
Definition 5 (Stronger relation ) Given two representations R1 and R2 and a constraint c(S1 , . . . , Sn ) such that
∀i, Si is synchronized for R1 and R2 , we say that R1 is
stronger than R2 on c (R1 c R2 ) iff when BC fails on c
for R2 then BC fails on c for R1 .
We say that R1 is strictly stronger than R2 on c (R1 c
R2 ) iff R1 c R2 and R2 6c R1 . We say that R1 and R2 are
equivalent on c (R1 ≡c R2 ) iff R1 c R2 and R2 c R1 .
We say that R1 and R2 are incomparable on c (R1 ∼c R2 )
iff R1 6c R2 and R2 6c R1 .
We say that R1 R2 (resp. R1 R2 or R1 ≡ R2 or
R1 ∼ R2 ) iff R1 c R2 (resp. R1 c R2 or R1 ≡c R2 or
R1 ∼c R2 ) for all constraints c.
Definitions for comparing propagation are often based on
how they prune values (e.g. (Debruyne and Bessiere 1997)).
However, such definitions are limited as both representations
must represent the same domains (i.e., the representations
are isomorphic). By using a definition based on detection of
failure, we can compare different representations of domains
that are not necessarily isomorphic. This choice is similar to
that made in (Bacchus et al. 2002).
The following theorems are useful to compare two (combined) representations.
5
An example
To illustrate the potential of this framework, we consider
pairwise combinations of three of the most popular representations for sets: SB, card and minlex.
Synchronization The synchronization property of Definition 2 gives rise to the following synchronization rules.
Theorem 1 Given two representations R1 and R2 :
• (R1 + R2 ) R1 and (R1 + R2 ) R2
• (R1 × R2 ) R1 and (R1 × R2 ) R2 .
Representations minlex and card
Proof: Immediate from the definitions. • lbC (S) ≤ |lbM L (S)| ≤ ubC (S) and lbC (S) ≤
|ubM L (S)| ≤ ubC (S);
Theorem 2 Given two representations R1 and R2 ,
(R1 × R2 ) (R1 + R2 ).
• lbC (S) ∈ {|s| | s ∈ DM L (S)} and ubC (S) ∈ {|s| | s ∈
DM L (S)}.
27
Minlex x SB x Card
Representations minlex and subsetbounds
• lbSB (S) ⊆ lbM L (S) ⊆ ubSB (S) and lbSB (S) ⊆
ubM L (S) ⊆ ubSB (S);
• lbSB (S)
⊇
∪s∈DM L (S) {s}.
∩s∈DM L (S) {s} and ubSB (S)
~
(Minlex x Card) + SB
⊆
(Minlex x SB) + Card
~
~
(SB x Card) + Minlex
Minlex + SB + Card
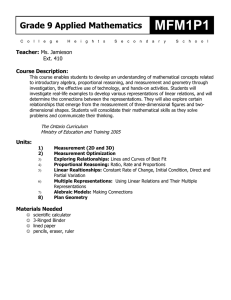
Figure 2: Comparison of triple combinations with minlex,
SB and card. H1 → H2 means H1 H2 whilst H1 −̃H2
means that H1 ∼ H2 .
Representations subsetbounds and card
• lbC (S) = |ubSB (S)| → lbSB (S) = ubSB (S);
• ubC (S) = |lbSB (S)| → ubSB (S) = lbSB (S);
6
• lbC (S) ≥ |lbSB (S)|, ubC (S) ≤ |ubSB (S)|.
This framework can be generalized to combinations of more
than two representations. We can then reason with, for instance, the hybrid domain representation (Sadler and Gervet
2008) and the multiset representations of (Law, Lee, and
Woo 2009; Law et al. 2011). The extension of the strong
combination operator is straightforward as we can take the
domain of S in R1 × R2 to be DR1 R2 (S). The extension of the weak combination operator is more problematic as the domain of S in R1 + R2 is not defined explicitly. This necessitates a generalization of the definitions of
synchronization and BC. In this generalization, we first define when S is synchronized for R1 × . . . × Rn and for
(R1 × . . . × Rj ) + . . . + (Rk × . . . × Rn ). Then, we define when S is BC on c for these combinations. Finally, we
give some algebraic identities that are useful in comparing
(combined) representations.
These synchronization rules are polynomial to enforce.
Pairwise Comparison
Theorem 4 (minlex, SB and card pairwise comparisons)
Figure 1 gives the relations that hold when comparing
minlex, SB and card pairwise. Similar results hold for
maxlex instead of minlex.
Minlex x Card
Minlex x SB
SB x Card
Minlex + Card
Minlex + SB
SB + Card
Minlex
Card
Minlex
SB
SB
Generalizing the Framework
Card
Figure 1:
Pairwise comparison of representations
minlex, SB and card. H1 → H2 means H1 H2 .
Theorem 5 (Ri × . . . × Rk × Rk+1 × . . . × Rn ) (Ri ×
. . . × Rk ) + (Rk+1 × . . . × Rn ).
Theorem 6 (R1 + . . . + Rn ) Rk for all k ∈ {1, . . . , n}.
Proof: By Theorem 1 and Theorem 2, we have all the relations claimed in Theorem 4. We thus only have to show
strictness. We highlight the most important results.
To show (minlex × card) (minlex + card),
take the constraint S1 ∪ S2 ⊇ {1, 3} and U =
{1, 2, 3}.
Suppose DM L (S1 ) = DM L (S2 ) =
{{1}, {1, 2}, {1, 2, 3}, {1, 3}, {2}}; lbC (S1 ) = ubC (S1 ) =
lbC (S2 ) = ubC (S2 ) = 1. S1 and S2 are synchronized for
both representations. BC on minlex × card fails whilst BC
on minlex + card does not prune.
To show that (minlex × SB) (minlex + SB),
take the constraint |S1| + |S2| = 5 and U =
{1, 2, 3, 4, 5}.
Suppose DM L (S1 ) = DM L (S2 ) =
{{1, 5}, {2}, {2, 3}, {2, 3, 4}, {2, 3, 4, 5}, {2, 3, 5}, {2, 4},
{2, 4, 5}, {2, 5}, {3}}; lbSB (S1 ) = lbSB (S2 ) = {},
ubSB (S1 ) = ubSB (S2 ) = {1, 3, 5}. S1 and S2 are synchronized for both representations. BC on minlex × SB
fails whilst BC on minlex + SB does not prune.
To show that (SB × card) (SB + card), we consider a unary constraint. Take the constraint on S which
is satisfied when the sum of its elements is at least 4 and
U = {1, 2, 3, 4, 5}. Suppose lbSB (S) = {} and ubSB (S) =
{1, 2, 3}; lbC (S) = ubC (S) = 1. S is synchronized for
both representations. BC on SB × card fails whilst BC on
SB + card does not prune. Theorem 7 (R1 × . . . × Rn ) Rk for all k ∈ {1, . . . , n}.
For reasons of space, we skip formal definitions and proofs.
To illustrate this generalization, we consider minlex,
SB, and card. By applying the weak and strong combination operators in all possible ways, we obtain 5 different
combined representations: minlex×SB×card, (minlex×
SB)+card, (minlex×card)+SB, (SB×card)+minlex,
and minlex + SB + card. The necessary synchronization
and BC rules can be obtained by instantiating their formal
definitions. In addition, using Theorems 5–7, we can compare the strength of these combinations and contrast with
(combined) representations involving a subset of the three
representations. In Figure 2, we show how the triple combinations compare. Due to space, we prove here only one of
the results.
Theorem 8 (minlex × SB) + card ∼ (minlex × card) +
SB.
Proof: We first show (minlex×card)+SB 6 (minlex×
SB) + card. Take the constraint |S1 ∩ S2 | = 1 on variables
S1 and S2 , and U = {1, 2, 3, 4, 5}. Suppose DM L (S1 ) =
DM L (S2 ) = {{1, 5}, {2}, {2, 3}, {2, 3, 4}, {2, 3, 4, 5},
{2, 3, 5}, {2, 4}, {2, 4, 5}, {2, 5}, {3}, {3, 4}}, lbSB (S1 )
= lbSB (S2 ) = {}, ubSB (S1 ) = ubSB (S2 ) = {1, 3, 4, 5},
lbC (S1 ) = lbC (S2 ) = ubC (S1 ) = ubC (S2 ) = 2. S1 and S2
28
Minlex x Card
are synchronized for all representations. (minlex × SB) +
card fails ({3} is pruned thanks to synchronization with
card) but (minlex × card) + SB does not prune.
We now show (minlex × SB) + card 6 (minlex ×
card) + SB. Take the constraint S1 ∪ S2 ⊇ {2, 3, 4}
on variables S1 and S2 . Suppose DM L (S1 ) = DM L (S2 )
= {{1, 2}, {1, 2, 3}, {1, 2, 3, 4}, {1, 2, 4}, {1, 3}, {1, 3, 4},
{1, 4}}, lbSB (S1 ) = lbSB (S2 ) = {1}, ubSB (S1 ) =
ubSB (S2 ) = {1, 2, 3, 4}, lbC (S1 ) = lbC (S2 ) = ubC (S1 ) =
ubC (S2 ) = 2. S1 and S2 are synchronized for all representations. (minlex×card)+SB fails but (minlex×SB)+card
does not prune. 7
~
Minlex + Card
~
Lengthlex
~
Minlex
Card
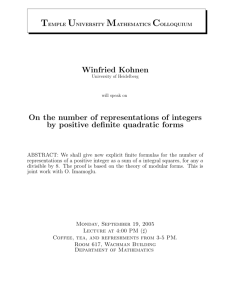
Figure 3: Comparison of minlex and card combinations
with lengthlex. H1 → H2 means H1 H2 whilst H1 −̃H2
means that H1 ∼ H2 .
We now show (minlex × card) 6 lengthlex. Take
again the constraint (S1 <M L S2 ∧ |S1 | = 2 ∧ |S2 |
= 2) and U = {1, 2, 3, 4}. Suppose DM L (S1 ) =
{{1, 2, 3}, {1, 2, 3, 4}, {1, 2, 4}, {1, 3}, {1, 3, 4}, {1, 4},
{2}, {2, 3}, {2, 3, 4}, {2, 4}, {3}, {3, 4}}, DM L (S2 ) =
{{1, 2}, {1, 2, 3}, {1, 2, 3, 4}, {1, 2, 4}, {1, 3}, {1, 3, 4},
{1, 4}, {2}, {2, 3}, {2, 3, 4}, {2, 4}, {3}, {3, 4}, {4}},
DLL (S1 ) = {{2, 3}, {2, 4}, {3, 4}, {1, 2, 3}}, DLL (S2 )
= {{4}, {1, 2}, {1, 3}, {1, 4}}, lbC (S1 ) = 2, ubC (S1 )
= 3, lbC (S2 ) = 1, ubC (S2 ) = 2. S1 and S2 are synchronized for both representations. With BC on minlex ×
card, we obtain DM L (S1 ) = {{1, 3}, {1, 3, 4}, {1, 4},
{2}, {2, 3}, {2, 3, 4}, {2, 4}}, DM L (S2 ) = {{1, 4}, {2},
{2, 3}, {2, 3, 4}, {2, 4}, {3}, {3, 4}} lbC (S1 ) = ubC (S1 )
= lbC (S2 ) = ubC (S2 ) = 2. BC on lengthlex fails. Thus,
(minlex × card) 6 lengthlex, and obviously we deduce
(minlex + card) 6 lengthlex and minlex 6 lengthlex.
Applying the Framework
In the following, we show where the existing combined representations are precisely situated in our framework. More
interestingly, we present new results regarding these representations, which help us understand better their pruning capabilities and how they compare to the similar representations that can be constructed using the framework.
Combination of two representations
The SB +card representation was used first in set constraint
programming in Oz (Müller 2001) and later for instance in
the Cardinal set solver (Azevedo 2007). The representation SB × card has been previously referred to as subsetcardinality (Malitsky, Sellmann, and van Hoeve 2008) or
sbc-domain (Yip and Hentenryck 2010). A similar BC definition for SB ×card is given in (Yip and Hentenryck 2010).
However, there was no formal study nor implementation of
SB × card.
Although the lengthlex representation uses both cardinality and lexicographic information, it can be defined in our
framework by a single representation T defined by a total order. Given that both lengthlex and combinations of minlex
and card representations focus on the same information, we
might wonder how they compare in general. Interestingly,
the lengthlex representation is incomparable to representations which deal with the cardinality and lexicographic ordering information either separately or simultaneously.
Theorem 9 lengthlex is incomparable to minlex,
minlex + card and minlex × card.
Proof: We first show lengthlex 6 minlex. Consider a conjunction of a lexicographic ordering and two
cardinality constraints (S1 <M L S2 ∧ |S1 | = 2 ∧
|S2 | = 2).
Suppose DM L (S1 ) = {{2}, {2, 3},
{2, 3, 4}}, DM L (S2 ) = {{1}, {1, 2}, {1, 2, 3}, {1, 2, 3, 4},
{1, 2, 4}, {1, 3}}, DLL (S1 ) = {{2}, {3}, {4}, {1, 2},
{1, 3}, {1, 4}, {2, 3}, {2, 4}, {3, 4}, {1, 2, 3}, {1, 2, 4},
{1, 3, 4}, {2, 3, 4}}, DLL (S2 ) = {{1}, {2}, {3}, {4},
{1, 2}, {1, 3}, {1, 4}, {2, 3}, {2, 4}, {3, 4}, {1, 2, 3}}. S1
and S2 are synchronized for all representations. BC on
minlex fails for both domains but BC on lengthlex does
not: DLL (S1 ) = {{1, 2}, {1, 3}, {1, 4}, {2, 3}, {2, 4}}
and DLL (S2 ) = {{1, 3}, {1, 4}, {2, 3}, {2, 4}, {3, 4}} are
BC. Thus, lengthlex 6 minlex, and obviously we deduce lengthlex 6 (minlex + card) and lengthlex 6
(minlex × card).
Even though our proof used a conjunction of a lexicographic constraint together with cardinality constraints,
there are many other basic constraints, like subset and disjoint, where lengthlex and the minlex and card combinations are incomparable. Figure 3 summarises these results.
Combination of three representations
(Malitsky, Sellmann, and van Hoeve 2008) introduces the
length-lex∗ representation, which is lengthlex × SB in
our framework. In (Yip and Hentenryck 2010), this is called
the ls-domain, but experiments were only performed with
lengthlex + SB. There was no formal study nor implementation of lengthlex × SB. As lengthlex × SB and
combinations of the minlex, SB and card represent similar
information, we might ask how they compare in general. In
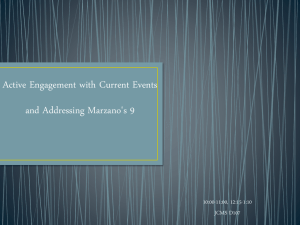
Figure 4, we compare the various combinations of minlex,
SB and card against lengthlex × SB. lengthlex × SB is
incomparable to any minlex based combination, including
minlex alone.
Theorem 10 lengthlex × SB is incomparable with
minlex, minlex × SB, minlex × card, minlex + SB +
card, (minlex × card) + SB, (minlex × SB) + card,
(SB × card) + minlex and minlex × SB × card.
Proof: First we show that (lengthlex × SB) 6 minlex.
Take the constraint S ≥M L {1, 3} on the variable S and
U = {1, 2, 3}. Suppose DM L (S) = {{}, {1}, {1, 2},
{1, 2, 3}}, DLL (S) = {{}, {1}, {2}, {3}, {1, 2}, {1, 3},
29
(Minlex x Card) + SB
Minlex x SB x Card
~
~
~
||s|| ≤ ubV (S)} and given a set of multisets A ⊆ 2U , we
define glbV (A) = min({||a||, a ∈ A}) and lubV (A) =
max({||a||, a ∈ A}). In (Law et al. 2011), this representation is extended by considering 8 different lexicographical orderings on multisets. The authors compared these
totally ordered representations in terms of expressiveness
and compactness, as well as experimentally with respect to
SB + card + variety. Our framework lets us combine SB,
card, variety and these other totally ordered representations in new ways, as well as compare their pruning power.
(Minlex x SB) + Card
Lengthlex x SB
~
(SB x Card) + Minlex
~
Minlex + SB + Card
Figure 4: Comparison of minlex based triplets against
lengthlex × SB. H1 −̃H2 means that H1 ∼ H2 .
{2, 3}, {1, 2, 3}}, lbSB (S) = {}, ubSB (S) = {1, 2, 3}. S1
is synchronized for all representations. Enforcing BC for
minlex fails whilst for lengthlex × SB it does not. Thus
lengthlex × SB is not stronger than any combination of
minlex.
We now show that (minlex × SB × card) 6
(lengthlex×SB). Take the constraint S1 ∪S2 = {1, 2, 3, 4}
on two variables S1 and S2 and U = {1, 2, 3, 4}. Suppose DLL (S1 ) = DLL (S2 ) = {{3}, {4}, {1, 2}}, lbSB (S1 )
= lbSB (S2 ) = {}, ubSB (S1 ) = ubSB (S2 ) = {1, 2, 3, 4},
DM L (S1 ) = DM L (S2 ) = {{1, 2}, {1, 2, 3}, {1, 2, 3, 4},
{1, 2, 4}, {1, 3}, {1, 3, 4}, {1, 4}, {2}, {2, 3}, {2, 3, 4},
{2, 4}, {3}, {3, 4}, {4}}, lbC (S1 ) = lbC (S1 ) = 1, ubC (S2 )
= ubC (S2 ) = 2. S1 and S2 are synchronized for all representations. lengthlex×SB fails whilst minlex×card×SB
does not (note that the lower bound of card is updated to 2).
Thus all minlex based combinations with SB and card are
not stronger than lengthlex × SB. 8
Complexity Results
Despite its benefits, combining representations can be challenging even with just two representations. For instance,
synchronization is intractable to achieve in general. As another example, enforcing BC even on unary constraints can
be hard.
Theorem 11 (Synchronization) Enforcing synchronization of S for R1 and R2 is NP-hard even if R1 and R2
are defined by total orderings for which computing the
successor of an element is polynomial.
Proof: Reduction from the NP-hard problem of deciding
whether the overlapping alldifferent constraint has a solution
(Kutz et al. 2008). Overlapping alldifferent is a conjunction of two alldifferent constraints involving integer variables that overlap on some of these variables. An integer variable Xi is a variable whose domain D(Xi ) is a finite set of integers. Suppose we have the integer variables
X1 , . . . , Xn and two constraints alldifferent(X1 , . . . , Xp )
and alldifferent(Xk , . . . , Xn ) with k < p. We build the universe U so that each occurrence of value j in a domain is
associated with a distinct element: U = {vji | 1 ≤ i ≤
n, j ∈ D(Xi )}. We define the total ordering <U on U such
0
that vji <U vji 0 if and only if i < i0 or i = i0 and j < j 0 .
We define Cn as the subset of 2U that contains all sets
of size n. We define Sol1 as the subset of Cn that contains sets {vj11 , . . . , vjpp , . . . , vjnn } such that j1 , . . . , jp is a
solution of alldifferent(X1 , . . . , Xp ). Similarly, Sol2 is the
subset of Cn that contains sets {vj11 , . . . , vjkk , . . . , vjnn } such
that jk , . . . , jn is a solution of alldifferent(Xk , . . . , Xn ). Let
Ceven be the set of all sets in 2U \Cn of even cardinality and
let Codd be the set of all sets in 2U \ Cn of odd cardinality.
Representation R1 is a total ordering <R1 on 2U defined
as follows. Given two sets s1 and s2 , s1 <R1 s2 if and only
if s1 ∈ Sol1 ∪ Ceven and s2 ∈
/ Sol1 ∪ Ceven , or s1 and s2
both belong to Sol1 ∪Ceven or are both outside Sol1 ∪Ceven
and s1 <M L s2 . Representation R2 is a total ordering <R2
on 2U defined as follows. Given two sets s1 and s2 , s1 <R2
s2 if and only if s1 ∈ Sol2 ∪ Codd and s2 ∈
/ Sol2 ∪ Codd ,
or s1 and s2 both belong to Sol2 ∪ Codd or are both outside
Sol2 ∪ Codd and s1 <M L s2 . We observe that computing
the successor of a set is polynomial both in R1 and in R2
because going from one solution of an alldifferent constraint
to another in lexicographic order is polynomial.
Suppose now that the set variable S is represented by
lbR1 (S) = {}, ubR1 (S) = {vjn , vjn0 }, lbR2 (S) = {v11 },
and ubR2 (S) = {vjn }. lbR1 (S) and ubR1 (S) both belong
In (Sadler and Gervet 2008), a combination of maxlex,
SB and card, called a hybrid domain, is introduced and associated inference rules are given to maintain consistency
between the bounds as well as to enforce some form of local consistency on common set constraints. This hybrid domain is a representation between maxlex + SB + card and
maxlex × SB × card. In the hybrid domain, each bound
of two representations is updated by looking at the bounds
of the other two representations at the same time. This is
stronger than reasoning pairwise as we do in maxlex +
SB + card. However, this reasoning does not consider the
bounds of all three representations simultaneously. Consider
for instance a variable S with the domain lbmaxlex (S) =
{4, 2, 1}, ubmaxlex (S) = {4, 3, 1}, lbSB (S) = {4},
ubSB (S) = {1, 2, 3, 4}, lbC (S) = ubC (S) = 3. The inference rules for hybrid domains will not change the subset
bounds, but 1 must be in lbSB for the bounds to be synchronized. Similarly, consider a variable S with the domain
lbmaxlex (S) = {4, 3}, ubmaxlex (S) = {5, 1}, lbSB (S) =
{}, ubSB (S) = {1, 2, 3, 4, 5}, lbC (S) = ubC (S) = 2.
The inference rules will not change the subset bounds, but 2
must be removed from ubSB (S) for the bounds to be synchronized. Thus, the hybrid domain is between a weak and
strong combination.
Combination of four representations
(Law, Lee, and Woo 2009) proposes the combined representation for multiset variables of SB + card + variety, where
variety counts the number of distinct elements ||a||. Similar to card, in variety we have DV (S) = {s | lbV (S) ≤
30
to Ceven . Now, for any s ∈ Sol1 we have lbR1 (S) <M L
s <M L ubR1 (S). Thus, for any s ∈ Sol1 we have
lbR1 (S) <R1 s <R1 ubR1 (S). In addition, for any
s ∈
/ Sol1 ∪ Ceven we have ubR1 (S) <R1 s. As a result,
Sol1 ⊆ DR1 (S) ⊆ Sol1 ∪ Ceven . Similarly, we prove
that Sol2 ⊆ DR2 (S) ⊆ Sol2 ∪ Codd . The only possible
sets common to DR1 (S) and DR2 (S) are in Sol1 ∩ Sol2
because Ceven ∩ Codd = ∅, Sol1 ∩ Codd = ∅, and
Sol2 ∩ Ceven = ∅. Now, sets in Sol1 ∩ Sol2 correspond to tuples that satisfy both alldifferent(X1 , . . . , Xp )
and alldifferent(Xk , . . . , Xn ). Therefore, the synchronization of the bounds of S for R1 and R2 will not fail if and
only if there exists a solution to the overlapping alldifferent
constraint. agating SB × card, the extra inference needed for BC on
SB × card on top of BC on SB + card is polynomial for
many common constraints. For reasons of space, we give
examples for =, 6=, and ⊆ but similar results hold for ∩, ∪,
\, and ⊕.
For S1 = S2 , SB × card and SB + card are equivalent
so we need to do nothing more. For S2 6= S2 , the only
additional pruning needed over SB + card is when one set
is ground and has cardinality 1, which can be captured by a
simple rule. For S1 ⊆ S2 , the extra pruning over SB + card
can be captured by the following rules.
Theorem 12 (BC on a unary constraint for SB × card)
There exists a unary constraint c such that enforcing BC
on c for SB, card and SB + card are polynomial but for
SB × card is NP-hard.
– ∀e ∈ lbSB (S2 ) ∩ ubSB (S1 ), add e to lbSB (S1 )
– ∀e ∈ ubSB (S2 ) ∧ e ∈
/ lbSB (S2 ) ∪ ubSB (S1 ), remove
e from ubSB (S2 )
• Fail: lbC (S1 ) + |lbSB (S2 ) \ ubSB (S1 )| > ubC (S2 )
• Pruning ubSB (S2 ) and lbSB (S1 ):
if lbC (S1 ) + |lbSB (S2 ) \ ubSB (S1 )| = ubC (S2 ) then:
• Pruning lbC (S2 ): lbC (S2 ) ≥ |lbSB (S2 )| + lbC (S1 ) −
|lbSB (S2 ) ∩ ubSB (S1 )|
Proof: Reduction from 3-SAT. Suppose a 3-SAT formula
F on n Boolean variables. S is a set variable that contains
positive and negative literals and clauses from F . We say
that S contains a truth assignment iff S contains exactly one
literal (positive or negative) for each of the n variables appearing in F . Let c(S) be satisfied iff (S does not contain
exactly n literals) or (S contains a truth assignment that satisfies all clauses in S). Now, enforcing BC on c for SB
is polynomial. There are several cases to consider. If S is
ground then we simply check c. If S has all its literals set but
the clauses are not ground, then there are several subcases.
In the first subcase, S contains a truth assignment. If some
clause in lb(S) is not satisfied we fail. Else, we prune from
ub(S) all clauses that are not satisfied. In the second subcase, S contains a number of literals different from n. We
then have support for all clauses. In the third subcase, we
simply check that S contains n literals that are not a truth
assignment and fail. Other cases (i.e., when not all literals
are set) are polynomial by similar arguments. Similarly BC
on c for card bounds is polynomial as every cardinality has
support. Thus, BC on SB + card is polynomial. However,
enforcing BC on SB × card is NP-hard. We set S such that
its upper and lower bound include the m clauses in F , its
lower bound is set to include no literals, its upper bound is
set to include all 2n possible literals, and the cardinality of
S is set to n + m. Enforcing BC on c for SB × card will
fail unless there is a satisfying assignment to F . • Pruning ubC (S1 ): ubC (S1 ) ≤ ubC (S2 ) − |lbSB (S2 )| +
|lbSB (S2 ) ∩ ubSB (S1 )|
No need to modify lbC (S1 ), ubC (S2 ), ubSB (S1 ), lbSB (S2 ).
9
Experimental Results
To compare combinations of representations which are theoretically incomparable, we ran some experiments. We select minlex (M L), lengthlex (LL), SB, card (C), and
their combinations, and evaluate the information lost when
transforming a domain from one of these representations to
another representation. The goal is to predict how much
the pruning performed by BC on one representation propagates to the others. Given a pair of (combined) representations R1 and R2 , we randomly generate the bounds
of a set S in R1 , initialize the bounds of S in R2 so that
DR2 (S) = 2U , and then synchronize the bounds of S in
R2 with the bounds of S in R1 . Finally we compute the
approximation ratio|DR2 (S)|/|DR1 (S)|. We average over
1000 sets. This gives us the entry (R1 , R2 ) in Table 1.
We report results for |U | = 10. However, similar observations hold for larger universes. As we indicate in bold,
4 out of 9 representations have mean approximation ratio
less than 3. These representations, in order of increasing
mean approximation ratio, are M L × SB × C, LL × SB,
M L × SB, and SB × C. Surprisingly, all these representations include the subset bounds. The remaining representations are either SB or do not include subset bounds, and
exhibit much looser approximations. In particular, a relatively simple combination like SB × C behaves much better
than for instance LL. The best binary combination LL×SB
significantly improves LL.
Apart from these general hardness results regarding combining representations, there also exists the issue of difficulty in reaching fix point in constraint propagation (Sellmann 2009). Our framework helps us right here to give
more precise results on specific cases. For instance, consider the SB and card representations used in most constraint solvers. When combining these representations using
either + or ×, we can only make polynomial number of domain changes before reaching fix point, because only a polynomial number of iterations can be made on SB and card
bounds, as opposed to for instance minlex bounds. Despite
the general hardness result given in Theorem 12 on prop-
10
Related Work
In his Ph.D. thesis (Jefferson 2007), Jefferson has provided a
framework for comparing set representations and their combinations. For instance he presented a result closely related
to Theorem 12 though he obtained it via a different way.
31
Table 1: Comparison of approximation ratios of different (combined) representations.
|U | = 10
Original Representation
ML
LL
SB
ML × C
M L × LL
M L × SB
LL × SB
SB × C
M L × SB × C
Geometric mean
ML
1
5.03
19.8
2.39
41.2
30.6
48.5
27.9
38.1
13.6
LL
7.05
1
30.7
4.15
19.3
50.6
24
21.2
39.3
13.7
SB
2.41
6.53
1
5.84
10.6
2.87
3.65
1.58
4.01
3.42
ML × C
1
1.97
16.1
1
18.7
19.1
22
12.8
17.6
7.26
Target Representation
M L × LL M L × SB LL × SB
1
1
2.36
1
4.82
1
11.7
1
1
1
2.28
1.7
1
5.1
2.42
15.3
1
2.42
8.98
2.6
1
10.9
1.41
1
14.3
1.34
2.05
3.98
1.87
1.54
Differently from (Jefferson 2007), our framework allows the
study of many different ways of combining multiple representations most of which were not previously known. In addition, the ordering we have defined on representations lets
us compare the pruning power of the (combined) representations and consequently measure their ability to prune the
search space. (Jefferson 2007) instead discusses search size
comparison only briefly by showing representations which
can represent more and produce smaller search trees. Altogether, in our work we can see what kind of combinations
can be built, how they compare and which ones already exist
or not.
11
SB × C
2.38
2.27
1
2.25
5.25
2.54
2.08
1
2.51
2.11
M L × SB × C
1
1.97
1
1
3.03
1
1.83
1
1
1.3
Second, our theoretical and experimental results suggest we
should develop solvers that more tightly integrate subset
bounds with representations like cardinality and lengthlex.
All these necessitate the design and development of efficient synchronization and propagation algorithms. Last, our
framework helps us to give more precise results on the reaching of fixed points when combining represetations (Sellmann 2009). An in-depth investigation is needed to understand how certain combinations impact on this issue.
References
Azevedo, F. 2007. Cardinal: A finite sets constraint solver.
Constraints 12(1):93–129.
Bacchus, F.; Chen, X.; van Beek, P.; and Walsh, T. 2002.
Binary vs. non-binary constraints. Artif. Intell. 140(1/2):1–
37.
Debruyne, R., and Bessiere, C. 1997. Some practicable
filtering techniques for the constraint satisfaction problem.
In Proc. of IJCAI’97, 412–417.
Gervet, C., and van Hentenryck, P. 2006. Length-lex ordering for set CSPs. In Proc. of AAAI’96, 48–53.
Gervet, C. 1994. Conjunto: Constraint propagation over
set constraints with finite set domain variables. In Proc. of
ICLP’94, 733.
Jefferson, C. 2007. Representations in constraint programming. Ph.D. Dissertation, University of York.
Kiziltan, Z., and Walsh, T. 2002. Constraint programming
with multisets. In Proc. of SymCon’02, CP’02 Workshop,
9–21.
Kutz, M.; Elbassioni, K.; Katriel, I.; and Mahajan, M. 2008.
Simultaneous matchings: Hardness and approximation. J.
Comput. Syst. Sci. 74(5):884–897.
Law, Y.; Lee, J.; Woo, M.; and Walsh, T. 2011. A comparison of lex bounds for multiset variables in constraint programming. In Proc. of AAAI’11, 61–67.
Law, Y.; Lee, J.; and Woo, M. 2009. Variety reasoning for
multiset constraint propagation. In Proc. of IJCAI’09, 552–
558.
Lindner, C., and Rosa, A. 1980. Topics on steiner systems.
Annals of Discrete Mathematics 7.
Conclusions and Future Work
We have defined a general framework for combining together different representations of set and multiset variables.
Central to this framework is the idea of synchronization
between representations. We have proposed two different
combinators, a weak method which considers each representation independently, and a strong method which considers them together. To compare representations, we have
proposed an ordering on representations that measures their
ability to prune the search space. We have undertaken a detailed study of combinations of representations (including
several like SB×card and lengthlex×SB which have been
proposed previously but not compared theoretically). We
identified several new relations. For example, the lengthlex
representation, which simultaneously captures cardinality
and lexicographic ordering information, is not better than
a representation which deals with cardinality and lexicographic ordering information separately or simultaneously.
As a second example, the hybrid domain of (Sadler and
Gervet 2008) provides between the weak and strong combination of the constituent representations. Finally, we have
provided some complexity results regarding synchronization
and propagation, and performed experiments showing how
good or bad a representation is in approximating others.
This paper opens the door to several interesting new directions. First, we believe that our framework along with
the complexity results provide useful step towards focusing
on particular combinations with promising theoretical properties and conforming their interest on practical problems.
32
Malitsky, Y.; Sellmann, M.; and van Hoeve, W. J. 2008.
Length-lex bounds consistency for knapsack constraints. In
Proc. of CP’08, 266–281.
Müller, T. 2001. Constraint Propagation in Mozart. Ph.D.
Dissertation, Saarland University.
Puget, J. 1992. PECOS: a high level constraint programming
language. In Proc. of Singapore International Conference on
Intelligent Systems (SPICIS’92), 137–142.
Sadler, A., and Gervet, C. 2008. Enhancing set constraint
solvers with lexicographic bounds. J. Heuristics 14(1):23–
67.
Sellmann, M. 2009. On decomposing knapsack constraints
for length-lex bounds consistency. In Proc. of CP’09, 762–
770.
Yip, J., and Hentenryck, P. V. 2010. Exponential propagation for set variables. In Proc. of CP’10, 499–513.
33