Proceedings of the Twenty-Seventh AAAI Conference on Artificial Intelligence
A Simple, but NP-Hard, Motion Planning Problem
Lawrence H. Erickson and Steven M. LaValle
University of Illinois at Urbana-Champaign
Department of Computer Science
201 N. Goodwin Ave.
Urbana, IL 61801
Abstract
Determining the existence of a collision-free path between
two points is one of the most fundamental questions in
robotics. However, in situations where crossing an obstacle is
costly but not impossible, it may be more appropriate to ask
for the path that crosses the fewest obstacles. This may arise
in both autonomous outdoor navigation (where the obstacles
are rough but not completely impassable terrain) or indoor
navigation (where the obstacles are doors that can be opened
if necessary). This problem, the minimum constraint removal
problem, is at least as hard as the underlying path existence
problem. In this paper, we demonstrate that the minimum
constraint removal problem is NP-hard for navigation in the
plane even when the obstacles are all convex polygons, a case
where the path existence problem is very easy.
1
O5
O4
qg
O3
O6
O7
O2
O1
qs
Introduction
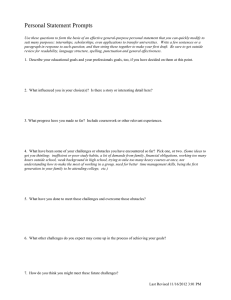
Figure 1: An instance of the minimum constraint removal
problem. A path from the start (qs ) to the goal (qg ) that
intersects the minimum number of obstacles (O2 and O5 ) is
shown.
In most robotic path planning problems, the goal is to travel
from a starting state to a goal state without colliding with
an obstacle along the way. However, there are many situations where collision with an obstacle may be inconvenient,
but not insurmountable. The obstacles could be closed doors
that the robot is capable of opening. In outdoor navigation,
the obstacles could be patches of rough terrain that the robot
is capable of crossing, but with a risk of damage. Alternately, it might be desirable to know the smallest set of obstacles that block a path between two points (perhaps a road
is being constructed, and the builders want to do it while demolishing as few pre-existing features of the environment as
possible).
With that in mind, a natural question arises: If no
collision-free path from the starting state to the goal state
exists, what is the fewest number of obstacles intersected by
any path from the start to the goal? This problem, introduced by Hauser, is called the minimum constraint removal
problem, as it asks for the minimum number of constraints
(obstacles) that would need to be removed from the environment to produce a collision-free path (Hauser 2012). A
sample problem is shown in Figure 1.
Hauser demonstrated that the discrete version of this
problem (in which the environment is represented by a
graph, with obstacles being subsets of the vertices) is NPhard, via a reduction from the minimum set cover problem.
This result is interesting, as the corresponding path existence
problem is very easy to solve in graphs with a breadth-first
search.
The problem of determining the “minimal” or “most important” reasons why a task cannot be accomplished has
been examined from the perspectives of propositional logic
(Göbelbecker et al. 2010) and linear temporal logic (Cimatti
et al. 2008). One can also view this problem as a generalization of the task of determining the non-existence of a
path between two points (Canny 1987; McCarthy, Bretl, and
Hutchinson 2012; Zhang, Kim, and Manocha 2008).
Since determining the existence of a collision-free
path between two points (the piano-mover’s problem) is
PSPACE-hard in general (Reif 1979), the minimum constraint removal problem is also at least that hard. Even
some very restricted versions of the problems remain difficult. Sokoban is a motion planning game played on a subgraph of the square grid, in which the goal is to push movable obstacles into certain goal locations. Sokoban remains
Copyright c 2013, Association for the Advancement of Artificial
Intelligence (www.aaai.org). All rights reserved.
1388
PSPACE-complete (Culberson 1997). Sliding block puzzles
are PSPACE-complete even when all blocks are 1x2 dominoes (Hearn and Demaine 2005).
However, there exist situations in which the pianomover’s problem is easy. If the robot is navigating in the
plane and the obstacle regions are polygonal sets, then a
straightforward cell decomposition will efficiently reveal the
existence or non-existence of a path from the start to the goal
(Chazelle 1987; LaValle 2006).
In this paper, we demonstrate that the corresponding minimum constraint removal problem is NP-hard, even when the
obstacles are restricted to being convex polygons. This is
done via a reduction from the maximum satisfiability problem for binary Horn clauses, a special case of MAX2SAT
that remains NP-hard (Jaumard and Simeone 1987). This
augments Hauser’s discrete NP-hardness result. While it is
possible to transform the convex polygon minimum constraint removal problem into a discrete, graph-based constraint removal problem by associating each connected region intersected by a particular set of obstacles with a single graph vertex, the graphs and obstacles obtained from this
transformation are very restricted (see Figure 2). The graphs
must be planar, and the subgraph induced by the set of vertices intersected by a particular obstacle must be connected
(though other restrictions also apply). The graphs used by
Hauser in the discrete NP-hardness proof are generally nonplanar, and the graphs induced by the set of vertices intersected by an obstacle are not generally connected.
Section 2 formally defines the minimum constraint removal problem. Section 3 describes the maximum satisfiability problem for binary Horn clauses. Section 4 describes
types of obstacles that are used in the reduction. Section 5
describes the gadgets that encode the variables and clauses
of the satisfiability problem. Section 6 explains how to obtain the solution to the maximum satisfiability problem from
the result of the minimum constraint removal problem. Section 7 discusses the implications of this NP-hardness result
and lists open problems.
2
O5
O4
O3
O6
O7
O2
O1
6
4
5
3, 4
5, 6
5
3
7
6
2, 3
5, 7
7
2
2, 6
2, 7
1, 2
1
7
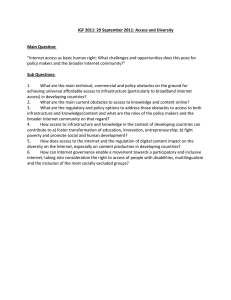
Figure 2: [top] The environment from Figure 1 with each
connected region intersected by a particular set of obstacles
assigned a graph vertex. Since movement within a single
region does not intersect any new obstacles, the minimum
constraint removal problem for this obstacle set can be transformed into a discrete problem. [bottom] The graph for the
discrete minimum constraint removal problem. The numbers next to a vertex denote the obstacles intersecting that
vertex.
Problem Formulation
A point robot navigates in R2 . Let {O1 , O2 , . . . , Om } be
a set of m obstacles. Each obstacle is a convex polygonal
subset of R2 . It is acceptable for obstacles to be degenerate
1-gons (points) or 2-gons (line segments). It should be noted
that either type of degenerate polygon can be simulated by
a non-degenerate polygon that is sufficiently small (in the
case of 1-gons) or sufficiently thin (in the case of 2-gons).
Let qs ∈ R2 be the starting point. Let qg ∈ R2 be the goal
point.
Let y be a continuous path from qs to qg . We will treat
y as a set of points, as the parameterization of the path is
irrelevant. The cover of y is the set of obstacles that intersect
y. A minimum constraint removal path y ∗ is a path whose
cover has a minimal size among all paths from qs to qg . A
minimum constraint removal S ∗ is the cover of a minimum
constraint removal path.
3
Maximum Binary Horn Clause
Satisfiability
A clause is a disjunction of literals. A Horn clause is a
clause that contains at most one positive literal. A binary
clause is a clause that contains exactly two literals. The decision problem about the satisfiability of a conjunction of
Horn clauses (HORNSAT) is solvable in linear time (Dowling and Gallier 1984). However, the corresponding maximization problem “Given a set of n Horn clauses, what is
the maximum number that can be simultaneously satisfied?”
(MAXHORNSAT) is NP-hard. Similarly, the decision problem about the satisfiability of a conjunction of binary clauses
(2SAT) is in P, but the corresponding maximization problem
(MAX2SAT) is also NP-hard.
The maximization problem remains NP-hard even if all
1389
will be used to encode the MAX2HORNSAT problem. One
type of gadget is used to assign values to the variables, one
type of gadget is used to represent clauses containing one
positive and one negative literal, and one type of gadget is
used to represent clauses containing two negative literals.
Gadgets that establish the variables and clauses for the
MAX2HORNSAT problem take the form of loops in the
path from qs to qg . These loops force the robot to choose
one of two routes to get to qg . In the variable gadgets, the
route chosen determines whether the variable is set to true
or false. In the clause gadgets, the routes represent the two
possible variable assignments that satisfy the clause.
clauses are required to be both Horn and binary (Jaumard
and Simeone 1987). This version of the problem is referred
to as MAX2HORNSAT. We will reduce MAX2HORNSAT
to the planar minimum constraint removal problem with
convex polygonal obstacles. To do this, we will use an input MAX2HORNSAT problem to design a start point, goal
point, and set of obstacles. The solution to the minimum
constraint removal problem using that start point, goal point,
and set of obstacles can quickly be transformed into the solution to the input MAX2HORNSAT problem. The number
of clauses of the input problem will be represented by c, and
the number of variables will be represented by `.
4
5.1
Obstacle Weighting
While the penalty for entering one obstacle is the same as
the penalty for entering any other obstacle, an obstacle of
weight k can be simulated by placing k standard obstacles
on the same set of points. The reduction uses three different
obstacle weights.
• Low-weight obstacles - These obstacles have unit weight.
In figures, low-weight obstacles will be represented by
grey lines and grey squares.
• Medium-weight obstacles - These obstacles have a weight
of a + 1, where a is the number of low-weight obstacles.
In figures, medium-weight obstacles will be represented
by dotted lines.
• High-weight obstacles - These obstacles have a weight of
b(a + 1) + a + 1, where a is the number of low-weight obstacles, and b is the number of medium-weight obstacles.
All obstacles used in the reduction are squares and line
segments.
The obstacle sets that we use will leave a path from qs to
qg that does not cross a high-weight obstacle. Since the cost
of crossing a high-weight obstacle is greater than the cost of
crossing all low and middle-weight obstacles combined, no
minimum constraint removal path will cross a high-weight
obstacle. Similarly, each path from qs to qg that avoids highweight obstacles must cross at least c medium-weight obstacles, and there exists at least one path that crosses exactly
c medium-weight obstacles. Since the cost of crossing a
medium-weight obstacle is higher than the cost of crossing
all the low-weight obstacles, each minimum constraint removal path will cross exactly c medium-weight obstacles.
5
Variable Gadgets
These gadgets exist to assign true or false values to variables. Each variable gadget consists of two loops. Taking
the left path through a loop assigns the value of “true” to the
corresponding variable. Taking the right path assigns a value
of “false”. A line-shaped medium-weight obstacle intersects
the left path of both loops, and another line-shaped mediumweight obstacle intersects the right path of both loops. This
is done to ensure that the path taken in the second loop corresponds to the same value as the path taken in the first loop.
In order for the medium-weight obstacles to not intersect
loops of variables that they are not associated with, the loops
are nested and decrease in size (both loops of x2 are in between the loops of x1 , and the loops of x1 are wider than
the loops of x2 , etc.). Figure 3 shows a variable gadget, and
their placement relative to start point, goal point, and other
gadgets.
qs
xi = T
xi = F
xi
Positive/Negative Clauses
xi = T
xi = F
xi
Gadgets
To Negative/Negative Clauses and Goal
In order to force the robot to take a predictable route, a path
leading from qs to qg will be outlined with high-weight obstacles. In the figures, this path is shown in black. Portions
of this path will be blocked by low-weight and mediumweight obstacles. Since the cost of intersecting a highweight obstacle is higher than the cost of intersecting all of
the low and medium-weight obstacles combined, there is no
reason for the robot to leave the outlined path.
The input MAX2HORNSAT problem will be encoded as
a minimum constraint removal problem through the use of
gadgets. Gadgets are sets of obstacles that represent portions
of the input problem. There are three primary gadgets that
Figure 3: A variable gadget for xi . Taking the left path
sets xi to true, and taking the right path sets xi to false.
Medium-weight obstacles (the dotted lines) ensure that the
same assignment path is taken in both the upper and lower
loops. The upper loop of the gadget appears before the positive/negative clause gadgets, and the lower loop appears after the positive/negative clause gadgets.
In order to establish the relationships between the variables and the clauses, the left and right paths of the loops in
1390
these gadgets are blocked by low-weight obstacles that also
block paths of the clause gadgets.
cles. If the clause is not satisfied, the robot crosses a new
obstacle, increasing the size of the path’s cover.
5.2
5.3
Positive/Negative Clause Gadget
Negative/Negative Clause Gadget
These gadgets are located after the lower loops of the variable gadgets, and before qg . The upper path of this gadget
is blocked by an obstacle that also blocks the right path of
the upper loop of one of the variable gadgets. The lower
path of the gadget is blocked by an obstacle that also blocks
the right path of the lower loop of one of the variable gadgets. If either of those variables is assigned a negative value,
then at least one of those obstacles will have already been
crossed in the variable gadget, and the clause gadget can be
crossed without additional penalty. Otherwise, as above, the
robot must cross an additional obstacle. A negative/negative
clause gadget and associated variable loops and low-weight
obstacles are shown in Figure 5.
These gadgets are located between the upper and lower
loops of the variable gadgets. A positive/negative clause
gadget consists of a single loop. The left path is blocked
by a low-weight obstacle that also intersects the left path in
the upper loop of the variable corresponding to the positive
literal. The right path is blocked by a low-weight obstacle
that intersects the right path in the upper loop of the variable corresponding to the negative literal. Figure 4 shows
a positive/negative clause gadget, the variable loops associated with it, and the low-wight obstacles (in grey) that establish the relationship between the clause and the variables.
qs
xi
xi
xj
qg
Positive/Negative Clauses
xi ∨ xj
xj
xi ∨ xj
Figure 5: A clause gadget for xi ∨ xj . A single low-weight
obstacle blocks the right path of the xi variable loop and the
left path of the clause loop. Another low-weight obstacle
blocks the right path of the xj variable loop and the right
path of the clause loop. If xi is true, then the left path of the
clause loop can be taken without intersecting an additional
obstacle. If xj is false, then the right path of the clause loop
can be taken without intersecting an additional obstacle.
Figure 4: A clause gadget for xi ∨ xj . A single low-weight
obstacle blocks the left path of the xi variable loop and the
left path of the clause loop. Another low-weight obstacle
blocks the right path of the xj variable loop and the right
path of the clause loop. If xi is true, then the left path of the
clause loop can be taken without intersecting an additional
obstacle. If xj is false, then the right path of the clause loop
can be taken without intersecting an additional obstacle.
5.4
Since the robot has already passed through the upper
variable gadget loops before reaching the positive/negative
clauses, the variables have already had values assigned to
them. If the clause is satisfiable, then either the obstacle
blocking the left path of the clause gadget has already been
crossed in a variable gadget, or the obstacle blocking the
right path of the clause gadget has already been crossed in
a variable gadget. Since there is no penalty for crossing a
single obstacle multiple times, if the clause is satisfied, the
robot can pass through it without crossing any new obsta-
Balancing Obstacles
At this point, the number of obstacles blocking the left path
of a variable loop might be different than the number of obstacles blocking the right path of a variable loop. For example, if the literal xi appears in several clauses, but xi does
not appear in any clauses, the left path of the upper loop
of xi ’s variable gadget will be blocked by many low-weight
obstacles, but the right path will not be blocked by any. In
order to ensure that the cost of setting a variable to be true is
the same as the cost of setting it to be false, for each obstacle
1391
qs
that is used to establish a relationship between a variable and
a clause, a balancing obstacle will be added to the other path
of the variable loop. This balancing obstacle will block the
variable loop, but will not intersect any clauses. Balancing
obstacles are represented by grey squares, and can be seen
in Figure 6.
x1
x2
x3
6
Reduction
x4
Since a path from qs to qg exists that does not intersect any
high-weight obstacles, a minimum constraint removal path
will not intersect any high-weight obstacles. Additionally,
the minimum number of medium-weight obstacles that can
be crossed on a path from qs to qg is c, the number of clauses.
Each literal within a clause adds an obstacle to the left and
right paths of the associated variable gadget loop (one obstacle used to establish the relationship between the clause
and the variable, and one balancing obstacle), one of which
needs to be crossed to reach the goal. Since there are two
literals per clause, a minimum constraint removal path will
cross at least 2c low-weight obstacles while setting the truth
values of the variables. Finally, each clause that is not satisfied requires the crossing of an additional low-weight obstacle. Therefore, if no clauses can be satisfied, the size of the
minimum constraint removal is
(a + 1)` + 3c.
A
qg
E
B
D
C
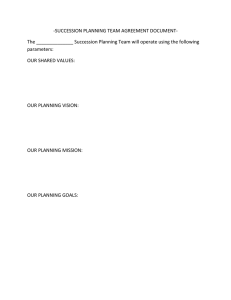
A = x2 ∨ x4
B = x3 ∨ x1
C = x1 ∨ x4
D = x2 ∨ x3
E = x3 ∨ x4
x4
x3
x2
(1)
x1
For each clause that can be satisfied, the size of the minimum constraint removal is decreased by 1. Therefore, given
a set of c clauses over ` variables that produces a minimum constraint removal of size z, the maximum number of
clauses that can be simultaneously satisfied is
Figure 6: A MAX2HORNSAT problem with four variables
and five clauses represented as a minimum constraint removal problem. High-weight obstacles surround the solid
black path between qs and qg . Medium-weight obstacles are
represented by dotted black lines. Low-weight obstacles are
represented by grey lines and grey squares.
(a + 1)` + 3c − z.
(2)
Therefore, MAX2HORNSAT is reducible to the minimum constraint removal problem in the plane even when
all obstacles are convex, indicating that the latter problem is
NP-hard. A complete representation of a MAX2HORNSAT
problem as a minimum constraint removal problem is shown
in Figure 6.
7
“There is no point at which more than k obstacles intersect”
or “Each obstacle intersects no more than k other obstacles”
render the problem tractable.
Discussion and Open Problems
Acknowledgements
Navigation in R2 with convex polygonal obstacles is a
highly restricted form of path planning. The NP-hardness
of the minimum constraint removal problem under these restrictions immediately implies the NP-hardness of the problem for higher dimensions and for less restricted types of
obstacles.
What restrictions on the environment and obstacles make
the problem tractable? In the plane, the minimum constraint
removal problem is trivial when the obstacles are forced to
be infinite lines or half-planes. It is not known whether forcing all obstacles to be unit circles, circles, or axis-aligned
rectangles makes the problem tractable, though the authors
conjecture that the first is tractable and the latter two are not.
One could also place restrictions on the ways in which the
obstacles are allowed to intersect. The problem becomes
trivial when the obstacles are allowed to intersect only pairwise. It is not known at what point restrictions of the form
This work is supported in part by NSF grant 0904501
(IIS Robotics), NSF grant 1035345 (CNS Cyberphysical
Systems), DARPA SToMP grant HR0011-05-1-0008, and
MURI/ONR grant N00014-09-1-1052.
References
Canny, J. 1987. A new algebraic method for robot motion
planning and real geometry. In Foundations of Computer
Science, 1987., 28th Annual Symposium on, 39–48.
Chazelle, B. 1987. Approximation and Decomposition of
Shapes. Lawrence Erlbaum Associates. chapter 4, 145–185.
Cimatti, A.; Roveri, M.; Schuppan, V.; and Tchaltsev, A.
2008. Diagnostic information for realizability. In Verification, Model Checking, and Abstract Interpretation, 52–67.
1392
Culberson, J. C. 1997. Sokoban is pspace-complete. Technical Report TR 97-02, The University of Alberta, Edmonton,
AB.
Dowling, W. F., and Gallier, J. H. 1984. Linear-time algorithms for testing the satisfiability of propositional horn
formulae. The Journal of Logic Programming 1(3):267 –
284.
Göbelbecker, M.; Keller, T.; Eyerich, P.; Brenner, M.; and
Nebel, B. 2010. Coming up with good excuses: What to
do when no plan can be found. In Proceedings of the Twentieth International Conference on Automated Planning and
Scheduling, 81–88.
Hauser, K. 2012. The minimum constraint removal problem
with three robotics applications. In Proc. Workshop on the
Algorithmic Foundations of Robotics.
Hearn, R., and Demaine, E. 2005. Pspace-completeness of
sliding-block puzzles and other problems through the nondeterministic constraint logic model of computation. Theoretical Computer Science 343(1):72–96.
Jaumard, B., and Simeone, B. 1987. On the complexity
of the maximum satisfiability problem for horn formulas.
Information Processing Letters 26(1):1 – 4.
LaValle, S. M. 2006. Planning Algorithms. Cambridge, UK: Cambridge University Press. Also available at
http://msl.cs.uiuc.edu/planning/.
McCarthy, Z.; Bretl, T.; and Hutchinson, S. 2012. Proving path non-existence using sampling and alpha shapes. In
Proc. IEEE International Conference on Robotics and Automation, 2563–2569.
Reif, J. 1979. Complexity of the mover’s problem and generalizations extended abstract. In Proceedings of the 20th
Annual IEEE Conference on Foundations of Computer Science, 421–427.
Zhang, L.; Kim, Y.; and Manocha, D. 2008. A simple path
non-existence algorithm using c-obstacle query. In Proc.
Workshop on the Algorithmic Foundations of Robotics, 269–
284.
1393