Proceedings of the Twenty-Eighth AAAI Conference on Artificial Intelligence
Elimination Ordering in Lifted First-Order Probabilistic Inference
Seyed Mehran Kazemi and David Poole
The University of British Columbia
Vancouver, BC, V6T 1Z4
{smkazemi, poole}@cs.ubc.ca
Abstract
der. Among these heuristics, minimum-fill, minimum-size
and minimum-weight are known to produce good orderings (Sato and Tinney 1963; Kjaerulff 1985; Dechter 2003).
These heuristics aim to minimize the number of introduced
fill-edges, the size of the largest clique and the weight of the
largest clique respectively. Other methods in the literature to
choose an elimination ordering include maximum cardinality search (Tarjan and Mihalis 1984), LEX M (Rose, Tarjan,
and Lueker 1976) and MCS-M (Berry et al. 2004). There
are also heuristics with local search methods such as simulated annealing (Kjaerulff 1985), genetic algorithm (Larranaga et al. 1997) and tabu search (Clautiaux, Ngre, and
Carlier 2004).
Relational probabilistic models (Getoor and Taskar 2007)
or template-based models (Koller and Friedman 2009) allow
for probabilistic dependencies among relations of individuals. They extend Bayesian networks and Markov networks
by adding the concepts of objects, object properties and relations. One of the major challenges in these models is to do
lifted inference (inference without grounding out the representation). Inference on the lifted level can potentially dramatically reduce the number of computations. Exact inference is also the basis for many approximate inference algorithms, either as a subcomponent (e.g., in sampling methods)
or as an ideal to approximate (e.g., in variational methods).
Poole (2003) proposed the problem of lifted inference in
these models. He introduced parfactor representation, the
concept of splitting, and proposed a lifted algorithm for multiplying factors and summing out variables. de Salvo Braz,
Amir, and Roth (2005) realized that in order to do lifted inference, the identity of individuals is not important, but it is
the number of individuals having a property which is important. Based on this, they introduced counting elimination by
which lifted inference could in many cases be done in polynomial time and space rather than exponential in the number of individuals in grounding. Milch et al. (2008) proposed
the C-FOVE algorithm which allowed for more cases when
counting was applicable by introducing counting formulas
for representing the intermediate results of counting.
Gogate and Domingos(2010), Jha et al. (2010), den
Broeck et al. (2011) and Poole, Bacchus, and Kisynski
(2011) proposed search-based lifted inference, which also
allows us to exploit logical structure.
All of these algorithms are very sensitive to the elimi-
Various representations and inference methods have
been proposed for lifted probabilistic inference in relational models. Many of these methods choose an order
to eliminate (or branch on) the parameterized random
variables. Similar to such methods for non-relational
probabilistic inference, the order of elimination has a
significant role in the performance of the algorithms.
Since finding the best order is NP-complete even for
non-relational models, heuristics have been proposed to
find good orderings in the non-relational models. In this
paper, we show that these heuristics are inefficient for
relational models, because they fail to consider the population sizes associated with logical variables. We extend existing heuristics for non-relational models and
propose new heuristics for relational models. We evaluate the existing and new heuristics on a range of generated relational graphs.
Introduction
Probabilistic graphical models, including Bayesian networks and Markov networks (Pearl 1988) are representations for dependencies among random variables.
Even though exact inference in these models is known to
be NP-hard (Cooper 1990), variable elimination (Zhang and
Poole 1994) and recursive conditioning (Darwiche 2001)
are two simple algorithms for exact inference which are
efficient for graphs with a low treewidth. The former is a
dynamic programming approach and the latter is a searchbased method. Both of these algorithms select an order for
the variables and eliminate (branch on) the variables in that
order to find the result of the given query. The elimination
order for variable elimination is the reverse of the splitting
(branching) order for recursive conditioning with the same
additions and multiplications (Darwiche 2001); here we will
refer to the elimination ordering even if we are doing search.
The performance of these methods is highly dependent
on the elimination order. Since finding an order which
results in the minimum total state space or in a width
equal to the treewidth of the graph is NP-complete (Arnborg, Corneil, and Proskurowski 1987; Koller and Friedman 2009), in practice heuristics are used to choose the orc 2014, Association for the Advancement of Artificial
Copyright Intelligence (www.aaai.org). All rights reserved.
863
nation (splitting) order. Some of them have constraints on
elimination orderings for correctness, but still leave many
choices of possible orderings. None of the papers compared
multiple elimination orderings. Just like non-relational models, the elimination order can severely affect the performance of the algorithm for relational models.
In this paper, we propose and evaluate some heuristics for
elimination ordering in relational models. First, we bring
some examples which show that the elimination ordering
heuristics used for non-relational graphical models are not
suitable for relational models. Then we examine the problems with these heuristics and propose other heuristics to
solve these problems. Since there have been no attempts
to optimize the elimination ordering for relational models,
we compare our results with the best heuristics for nonrelational models.
V1 (x) count
True
i
False n − i
(a)
V1 (x) V2 (x) count
True True
j
True False
i− j
k
False True
False False n − i − k
(b)
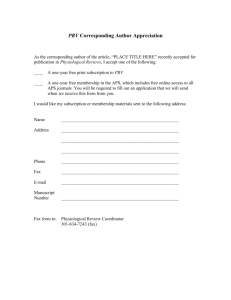
Figure 2: Two counting contexts
Search-Based Lifted Inference
Gogate and Domingos (2010), Jha et al. (2010), den Broeck
et al. (2011) and Poole, Bacchus, and Kisynski (2011) proposed search-based lifted inference algorithms. We base
our work on lifted recursive conditioning (LRC) (Poole,
Bacchus, and Kisynski 2011) because the algorithm was
straightforward to implement, and the differences from the
others were small enough so that what is learned about elimination ordering is applicable to all of the algorithms. We
first give the definitions for counting context and context
which are used in the inference algorithm and then describe
the algorithm for Boolean PRVs.
A counting context is of the form hV, χi, where V is a set
of PRVs, and χ is a function mapping assignments of PRVs
in V into non-negative integers. It specifies how many tuples
of individuals in the cross product of the population of the
logical variables take on the values for each assignment in
V. Figures 2(a) and 2(b) represent two counting contexts.
The former indicates V1 (x) = True for i out of n individuals
of x and is False for the rest, and the latter indicates V1 (x) ∧
V2 (x) = True for j out of n individuals of x, V1 (x)∧¬V2 (x) =
True for i − j out of n individuals of x, and so forth.
A context is a set of counting contexts such that the logical variables in the PRVs in separate counting contexts represent different populations. A PRV is assigned in a context
if it unifies with a PRV in one of the counting contexts. For
example, V1 (x) is assigned in a context having any of the
counting contexts in Figure 2. A parfactor is assigned in a
context if all its PRVs are assigned in that context.
The LRC algorithm is a recursive function which takes in
a context con and a set of parfactors Fs and calculates the
product of the values of the parfactors in that context by recursive calls. Computed values are stored in a cache to avoid
recomputation for the same recursive call. The function is
first called by an empty context and the set of all parfactors
in the model. The recursion stops if there are no parfactors
(i.e. Fs = {}), and 1 is returned. If Fs with con has already
been computed and is in the cache, that value is returned. If
any parfactor f ∈ Fs is assigned in con, it is evaluated and its
value is multiplied by the value of the recursive call with the
other parfactors (i.e. Fs\ f ). If the parfactor graph is disconnected, a recursive call is made for each connected component and the product of the returned values is returned. If a
logical variable x is in all PRVs that are not assigned in con
in all parfactors (perhaps renamed), the grounding is a set
of identical (up to renaming) disconnected components, one
for each assignment of x; we recursively evaluate one component and raise it to the power of the |pop(x)|. Otherwise a
Background
Relational probabilistic models represent probability distributions over relations among individuals.
A population corresponds to a domain in logic and refers
to a set of individuals. The cardinality of the population is
called population size which is a non-negative number. For
example, a population can be the set of soccer teams in world
cup 2014, where Germany is an individual and the population size is 32.
Logical variables start with lower-case letters, and constants start with an upper-case letter. Each logical variable
x has a type τ and a population pop(x) associated with it
where |x| = |τ| = |pop(x)| is the size of the population.
A parameterized random variable (PRV) (Poole 2003)
is of the form F(t1 , ...,tk ) where F is a k-ary predicate symbol and each ti is a logical variable or a constant. If k = 0 we can omit the parentheses. For example,
PlaysFor(player,team) can be a PRV with predicate symbol PlaysFor which is true if player plays for team. We use
capital letters in bold to represent a set of PRVs.
A parametric factor or parfactor (Poole 2003) is of
the form hC, V, φ i where V is a set of PRVs, C is a set of
constraints on the logical variables in V and φ is a factor
(which is a function from assignments of values to PRVs in
V, into non-negative real numbers). As an example, h{x 6=
y}, {Friend(x, y), Adult(x), Adult(y)}, φ i is a parfactor having three PRVs with two logical variables that are not equal,
and a function φ which maps every set of assigned values to the three PRVs (e.g. Friend(x, y) = True, Adult(x) =
True, Adult(y) = False) into a non-negative real number. A
probability model can be defined by a set of parfactors.
A parfactor graph consists of a set of parfactors as the
nodes of the graph where there is an arc between two parfactors f1 and f2 if there is a PRV V1 in f1 which unifies with a
PRV V2 in f2 without violating any of the constraints of the
two parfactors.
A grounding of a relational model is a model consisting of all instances of the PRVs where logical variables are
replaced by individuals in their population such that the constraints are satisfied.
864
{A,B(x)}
{A,C(x)}
{A,B(x,y)}
{S(x),R(x,y)}
{B,C}
{B(x),C(x)}
{A,B}
{A(x),B}
{B,C(x)}
{B(x),D(x)}
{R(x,y),Q(x)}
{B(x,y), C(x,z)}
{C(x),E(x)}
{A,C(x)}
{A(x),C}
{D(x),E(x)}
(a)
{B,D}
(b)
{A(x),D}
{C(x,z),D}
(c)
(d)
(e)
Figure 1: Parfactor graphs: (a) Example 1, (b) Example 2, (c) Example 3, (d) Example 4, (e) Example 5.
the algorithm realizes that the grounding is disconnected because all PRVs of all parfactors have the same logical variable x. So it replaces x by one of its individuals Xi getting a new set of parfactors with V1 = {S(Xi ), R(Xi , y)} and
V2 = {R(Xi , y), Q(Xi )}), does the calculations for this new
set and raises the result to the power of |pop(x)|. In order to
solve the problem with the new set of parfactors, it branches
on S which makes two branches. Then for the first branch, it
branches on R which produces |1 + pop(y)| new branches.
At this point, the algorithm evaluates the first parfactor and
then branches on Q which produces two new branches. Then
the second parfactor is evaluated and the results are stored in
the cache. This process continues for other branches until the
final result is obtained.
PRV V is selected to branch on. Branching on a PRV is performed by making recursive calls to the LRC function; the
number of generated branches corresponds to the number of
recursive calls.
A PRV V having no logical variables generates two
branches (i.e. two recursive calls). In one branch, a counting context assigning V to False, and in the other one, a
counting context assigning V to True is added to the context
con.
A PRV V1 having a logical variable x of type τ (where
we still have not branched on any other PRV having a logical variable of type τ) generates n + 1 branches where
n = |pop(x)|. In the i-th branch, a counting context assigning V1 = True to i out of the n individuals of x and the other
n − i individuals to False (as in Figure 2 (a)) is added to
the context. The value of this branch is multiplied by C(n, i)
because that’s the number of ways we can have i True individuals out of a population of n.
Suppose we have already branched on a PRV V1 having a
logical variable of type τ and we want to branch on a PRV V2
having a logical variable of the same type. Consider the case
for V1 with i True individuals (as in Figure 2 (a)). In order
to branch on V2 , we first generate i + 1 branches where j-th
branch represents the case when for the i True individuals in
V1 , j of them have V2 True and the other i − j have V2 False,
and the value of this branch is multiplied by C(i, j). For each
branch, we generate n − i + 1 branches where k-th branch
represents the case when for the n−i False individuals in V1 ,
k of them have V2 True and the other n − i − k have V2 False,
and the value of this branch is multiplied by C(n − i, k). The
counting context for V1 in con (represented in Figure 2(a)) is
then replaced by the counting context in Figure 2 (b).
The case where we want to branch on a PRV V of type τ
where we have already branched on m PRVs having a logical variable of type τ is similar to the previous case where
for each assignment of values to the previous m PRVs, we
generate a level of branches assigning the number of True
and False individuals of V .
If the PRV selected to be branched on has more than one
logical variable, one of them is grounded and the algorithm
works as described.
Example 1. Consider a parfactor graph with two parfactors where V1 = {S(x), R(x, y)} and V2 = {R(x, y), Q(x)}
and suppose x and y have different types and there is no
constraint on the parfactors (Figure 1 (a)). Suppose that the
order in which we want to branch on PRVs is hS, R, Qi. First,
Existing Heuristics for Elimination Ordering
Most heuristics for elimination ordering in non-relational
models try to minimize the width (number of random variables in a factor, which would correspond to the number of
PRVs in a parfactor) of the largest generated factor. While
this is appropriate for these models, it is not a good measure of complexity for lifted inference in relational models. Among existing heuristics for non-relational models, the
minimum-fill greedy heuristic is the one which is widely
used in practice (Dechter 2003). This heuristic successively
eliminates a variable which produces the fewest number of
fill-edges and often breaks the ties arbitrarily. Here we assume that ties are broken alphabetically. In this section, we
bring some examples which show why this is not a good
heuristic for relational models. Then we use the intuition
from the examples to motivate new heuristics which address
these problems.
In the rest of the paper, we refer to the order in which
PRVs are eliminated which is the reverse order in which we
branch on in search-based lifted inference. That’s because
the heuristic that we found that works best, as well as most
existing heuristics in the literature and also other proposed
heuristics in this paper (except one of them called “population order” heuristic) greedily select a PRV to eliminate. For
simplicity, we assume the parfactors have no constraints and
write them just by their set of PRVs. We use the simple term
“min-fill” to refer to minimum-fill greedy heuristic.
Inefficiency of Existing Heuristics
Example 2. Consider a parfactor graph with parfactors
{A, B}, {B,C(x)} and {A,C(x)} (Figure 1 (b)) and suppose
865
|pop(x)| = n. If we use min-fill to choose the elimination
ordering, all PRVs produce zero fill-edges. By breaking the
tie alphabetically, A is the first PRV in the order. However, eliminating A produces the parfactor {B,C(x)} which
needs 2 ∗ (n + 1) branches to be evaluated (2 branches for
B = True and B = False and in each of these branches,
(n + 1) branches for C where i-th branch represents the case
where i of the individuals are True and the rest are False).
But if C was the first PRV in our order, eliminating C would
result in the parfactor {A, B} which needs only 2∗2 branches
to be evaluated.
This example shows that the idea of breaking ties arbitrarily in min-fill is not a good choice for relational models and a
better alternative is to break ties according to the population
sizes of logical variables.
Example 3. Consider a parfactor graph with parfactors {A, B(x)}, {A,C(x)}, {B(x),C(x)}, {B(x), D(x)},
{C(x), E(x)} and {D(x), E(x)} (Figure 1 (c)) and suppose
|pop(x)| = n. If we use min-fill, A is the first PRV eliminated
because it’s the only PRV that introduces no fill-edges. This
means that in search-based lifted inference, A is the last PRV
we branch on. Therefore, we will have a very huge tree when
we branch on B, C, D and E (it will be a tree with a depth of
15).
Consider what happens when A is at the end of the elimination order. In this case, we first branch on A. Then, all
PRVs have the same logical variable. This means we can
solve the problem for one individual and raise the result
to the power of n. In this way, we effectively have a nonrelational problem.
This example represents the case with PRVs having logical variables with large population sizes. By placing these
PRVs at the beginning of the elimination order (equivalently
at the end of branching order), we may solve the problem
just for one of the individuals which offers a significant computational benefit.
Example 4. Consider a parfactor graph with parfactors
{A(x), B}, {A(x),C}, {A(x), D}, {B,C} and {B, D} (Figure
1 (d)) and suppose |pop(x)| = n. Using any method which
tries to minimize the width of the largest generated parfactor,
A is not the first PRV in elimination ordering. In min-fill, for
example, C or D is the first PRV in the order depending on
how we break the tie. However, eliminating C or D results
in the parfactor {A(x), B} which needs (n + 1) ∗ 2 branches
to be evaluated. Now suppose A is the first PRV in the order.
In this case, eliminating A results in a parfactor {B,C, D}
which only needs 2 ∗ 2 ∗ 2 branches.
This example shows that the width of the largest generated parfactor is not the only important factor which should
be taken into account but the population sizes of the logical
variables in its PRVs are also important. A parfactor with
two PRVs having highly populated logical variables needs
many more branches to be evaluated than a parfactor with
three PRVs having no logical variables and avoiding to generate such parfactor should be more encouraged.
Example 5. Consider a parfactor graph with parfactors
{A, B(x, y)}, {B(x, y),C(x, z)} and {C(x, z), D} (Figure 1 (e))
and suppose |pop(x)| = |pop(y)| = |pop(z)| = n. Using
min-fill, the elimination ordering is hA, B,C, Di meaning
that after branching on D, it branches on C. Since C has
more than one logical variable, the algorithm grounds one
of them. However, the elimination ordering hB,C, A, Di only
branches on PRVs with fewer than two logical variables and
does not require grounding any population.
This example demonstrates that it’s a good idea to place
the PRVs with more than one variable at the beginning of the
elimination ordering (equivalently at the end of branching
ordering) to avoid grounding the graph as much as possible.
Proposed Heuristics for Elimination Ordering
The examples in the previous section motivate the following
intuitions: We should try to eliminate PRVs having variables
with large population sizes sooner than others; we should
pay attention to the size of the new parfactor generated rather
than just its width; PRVs with more than one logical variable
should be at the end of the branching ordering. Based on
these observations, we propose new heuristics.
We define the context-free branching factor (CFBF) of a
PRV V (x1 , . . . , xm ) to be C(∏m
i=1 (|pop(xi )|) + |range(V )| −
i!
1, |range(V )| − 1), where C(i, j) = j!(i−
j)! and|range(V )| is
the number of values that V can take. Note that this formula
corresponds to the number of branches when branching on
the PRV V , assuming an empty context. Also note that as explained in search-based lifted inference section, the number
of branches for a PRV depends on the context. The reason
why the number of branches for the PRV V is equal to the
given combination is that each branch represents a particular
assignment of values in range(V ) to the individuals, so the
number of branches is equal to the number of ways we can
assign non-negative integer values to |range(V )| numbers
K1 , K2 , . . . , K|range(V )| so that they sum to ∏m
i=1 (|pop(xi )|),
and this can be solved by the given combination.
We also define the context-free branching factor (CFBF)
of a parfactor to be ∏ni=1 (1 + |pop(PRVi )|) where n is the
number of PRVs in the parfactor and PRVi is its i-th PRV.
These two definitions are used in our proposed heuristics.
MinTableSize Heuristic
The MinTableSize heuristic places PRVs with more than one
logical variable at the beginning of the elimination order
sorted in descending order by the number of logical variables they contain, and among those with the same number,
one with the largest CFBF is eliminated first. Then among
PRVs having no more than one logical variable, it eliminates
the PRV that results in a parfactor with minimum CFBF
sooner. The idea of eliminating a PRV that results in a parfacotr with smaller CFBF sooner resembles the intuition behind the operation selection of (Milch et al. 2008), in which a
cost is assigned to each possible operation by computing the
total size of the factors generated by the operation and the
one having the minimum cost is performed next. However,
we only do this for PRVs with less than two logical variables and place the PRVs with at least two logical variables
at the beginning of the elimination order to avoid grounding, and the only operation we have here is elimination (or
branching). Using MinTableSize heuristic, ties may occur.
866
We break ties according to the CFBFs of the PRVs, where a
PRV with a larger CFBF will be eliminated sooner.
This heuristic is consistent with our observations in the
examples. The algorithm for selecting the next PRV to be
eliminated using MinTableSize is shown in Algorithm 1. The
first loop finds PRVs with more than one logical variable and
selects one with maximum number of logical variables, then
the maximum CFBF. If there is no such PRV, the second
loop finds the PRV which produces the smallest parfactor
and breaks the ties according to the CFBF.
min-fill weighs all fill-edges equally and successively eliminates a PRV which minimizes the sum of these weights.
In relational models, however, fill-edges can have different sizes. Larger fill-edges can degrade the efficiency more
severely than small fill-edges and they should have a higher
weight. We consider the weight of each fill-edge to be its
table size which is the multiplication of the CFBFs of the
PRVs which are connected by the fill-edge. Like min-fill, relational minimum-fill heuristic also successively eliminates a
PRV which minimizes the sum of these weights. Since each
weight is representing the size of a particular table which
is separate from other tables, considering the sum of the
weights to minimize is reasonable.
Algorithm 1 MinTableSize algorithm
nextPRV ←− 0/
maxCFBF ←− 0
maxNumLogVars ←− 2
for i = 1 to numberOfPRVs do
if numLogVars(PRV[i]) > maxNumLogVars
or
(numLogVars(PRV[i]) = maxNumLogVars and
|CFBF(PRV[i])| > maxCFBF) then
maxNumLogVars ←− numLogVars(PRV[i])
maxCFBF ←− |CFBF(PRV[i])|
nextPRV ←− PRV[i]
if nextPRV 6= 0/ then
return nextPRV
minTableSize ←− +∞
for i = 1 to numberOfPRVs do
f ← parfactor resulting from eliminating PRV[i] in Fs
if |CFBF(f)| < minTableSize or (|CFBF(f)| = minTableSize and |CFBF(PRV[i])| > |CFBF(nextPRV)|)
then
minTableSize ←− |CFBF(f)|
nextPRV ←− PRV[i]
return nextPRV
Evaluation of Heuristics
In this section, we evaluate and compare our proposed relational heuristics, which are MinTableSize, population order
and relational min-fill, and also the non-relational min-fill
heuristic, which is one of the best known heuristics for nonrelational models, based on a series of empirical and theoretical criteria. Experiments were carried out using C++ with
Microsoft Visual Studio 2010 on a 2.63GHz core with 2GB
of memory under Windows 7.
Empirical Efficiency
To evaluate how efficient each heuristic works, we generated
parfactor graphs as follows. First, we generated a random
number of PRVs having variables with random populations,
and then generated a random number of parfactors. Then,
we randomly assigned some of the PRVs to each parfactor.
Since all elements of the parfactor graphs that distinguish
one graph from another are generated randomly, the whole
space of parfactor graphs can be covered in this way and our
generated graphs are arguably reasonable representatives to
base the experiments on them. The reason for using synthesized graphs for evaluation is that the benchmark graphs
used in other works are not big enough (in terms of the number of PRVs and parfactors) to serve as a good representative
for evaluating elimination ordering heuristics.
We performed the search-based inference for these parfactor graphs using the elimination ordering heuristics mentioned earlier and recorded the running times of the inference in milliseconds. For each parfactor graph and each
heuristic, we ran the program 10 times and computed the
average, which is reasonable as the algorithm is deterministic. We set the maximum allowable time for inference to be
five minutes (300 seconds). If the program could not find the
result in this time, we stopped it and reported ”> 300”.
Results are presented in Table 1 (the minimum time is
in bold). Running time of lifted inference using each of the
heuristics are reported in scale of seconds. The first four
rows in the table are the parfactor graphs in Examples 2, 3, 4
and 5 respectively and others are parfactor graphs generated
as described earlier.
From the table, we can see that MinTableSize is outperforming other heuristics in nearly all cases. There are only
a few cases where one of the other heuristics has performed
better than MinTableSize.
Population Order Heuristic
Another relational heuristic can be motivated by considering
our first observation in the examples of section 4.1 which
is, eliminating PRVs having variables with large population sizes sooner than others. We call this population order heuristic in which we successively branch on the PRV
with the smallest CFBF. This heuristic can be implemented
in two ways. The first way is to sort the PRVs according to
their CFBF at the beginning and use that as the branching
order, and the second way is to determine at each round the
PRV which has the smallest CFBF among remaining PRVs
and branch on it. While the former implementation produces
a fixed order, the latter implementation allows for a dynamic
ordering (i.e. the algorithm may use different orders in each
branch).
Relational Minimum-Fill Heuristic
One possibility for proposing a relational elimination ordering heuristic is to extend min-fill so that it also considers the
population sizes. The intuition behind min-fill is that minimizing the number of fill-edges reduces the chance of generating a factor with a large width in the future. Therefore,
867
Table 1: Running times of lifted inference using different heuristics for elimination ordering
min-fill
relational
min-fill
population
order
1: {A,B},{B,C(x)},{C(x),A},|pop(x)|=30
2.854
2.854
0.046
0.046
2: {A,B(x)},{A,C(x)},{B(x),C(x)},{B(x),D(x)},{C(x),E(x)},{D(x),E(x)}, |pop(x)|=5
79.245
79.245
0.134
0.134
3: {A(x),B},{A(x),C},{A(x),D},{B,C},{B,D}, |pop(x)|=25
2.768
2.768
0.192
0.192
4: {A,B(x,y)},{B(x,y),C(x,z)},{C(x,z),D}, |pop(x)|=3, |pop(y)|=5, |pop(z)|=5
> 300
> 300
0.178
0.178
5: {A,B(x)},{B(x),C(x)}, |pop(x)|=10
1.530
1.530
0.016
0.016
6: {A(x)},{A(x),B(x),C(y)},{A(x),D(y)},{D(y),E,F,G},{D(y),H(z)}, |pop(x)|=5, |pop(y)|=10, |pop(z)|=3
9.617
9.617
> 300
6.618
7: {A},{A,B},{B,C},{C,D},{C,G},{D,E,G},{A,E,F},{E,H}
0.460
0.460
0.734
0.567
104.751
parfactor graphs and population sizes of logical variables
8: {A(x)},{A(x),B(x),C(y)},{A(x),D(y)},{D(y),E,F,G},{D(y),H(z)}, |pop(x)|=5, |pop(y)|=50, |pop(z)|=3
MinTableSize
172.163
172.163
> 300
9: {A,B(x)},{B(x),C(x)},{D(x),E(x)},{E(x),F(x)},{G(x)}, |pop(x)|=10
1.555
1.555
0.062
0.062
10: {A(x),B(y)},{A(x),C(z)},{B(y),D(x)},{C(z),D(x)}, |pop(x)|=5, |pop(y)|=10, |pop(z)|=15
69.410
29.400
22.157
21.919
11: {A(x),B(y)},{A(x),E},{D(x,y),E},{C,D(x,y)},{C,B(y)},|pop(x)|=7, |pop(y)|=18
> 300
0.746
0.746
0.746
12: {A,B(x),E(x)},{C(x),D(y),B(x)},{E(x),C(x)},{C(x),B(x)},{A,D(y)}, |pop(x)|=2, |pop(y)|=5
17.785
2.420
2.445
2.409
13: {A(x),B(y)},{A(x),C(y)},{A(x),D(y)},{E(y),B(y)},{E(y),C(y)},{E(y),D(y)}, |pop(x)|=20, |pop(y)|=2
14.678
6.245
10.026
6.245
14: {A(x),B(y),C(y)},{A(x),D(y)},{E(x),B(y),C(y)},{E(y),D(y)}, |pop(x)|=15, |pop(y)|=3
> 300
192.925
34.411
34.710
15: {A(x),B(y),C(x)},{B(y),C(x),F(z)},{A(x),F(z),D(w)},{B(y),E(w)},{C(x),D(w)},|pop(x)|=2,|pop(y)|=5,|pop(z)|=10,|pop(w)|=30
256.192
256.192
56.880
56.274
16: {A(x),B(x,y)},{B(x,y),C(y)},{A(x),D,E},{C(y),F}, |pop(x)|=6, |pop(y)|=16
> 300
> 300
1.273
0.926
17: {A(x),B(y)},{B(y),E,F},{A(x),C,D}, |pop(x)|=5, |pop(y)|=10
0.882
0.882
1.886
0.882
183.353
183.353
0.220
0.540
18: {A(x),B(x,y)},{B(x,y),C(x,y),D(y)},{A(x),D(y)}, |pop(x)|=4, |pop(y)|=7
Furthermore, we can see that the population order heuristic results in a better running time than min-fill and relational
min-fill in most cases. However, it has a very bad performance on some parfactor graphs. The reason is that population order heuristic does not take into account how big the
newly generated parfactors are.
We can also see that min-fill and relational min-fill produce the same results in most cases. That’s mostly because
in some parfactor graphs, we can successively eliminate a
PRV which produces no fill-edges, or the generated filledges have the same CFBFs. In these cases, both min-fill
and relational min-fill choose the same PRV to be eliminated and have the same performance. However, in cases
where they produced different results, relational min-fill has
a better performance than min-fill.
that MinTableSize is doing a better job of finding a new efficient elimination order as we change the population sizes of
logical variables.
Avoiding Grounding Populations
The MinTableSize heuristic avoids unnecessary grounding
of a population. We can prove the following proposition:
Proposition If any order results in not grounding any population, then MinTableSize will produce an order that results
in not grounding any population.
Proof. MinTableSize branches firstly on PRVs with fewer
than two logical variables. Branching on these PRVs does
not require grounding any population. After branching on
these PRVs, if there exists an order that results in not grounding any population, there should be a PRV having zero or
one logical variables (otherwise branching on any of the remaining PRVs needs grounding). This means that at least
one of the logical variables has been replaced by a constant.
We know this happens when all PRVs of all parfactors have
the same logical variable, so at least one of the logical variables has been replaced by a constant in all remaining PRVs.
Since all PRVs have the same number of logical variables
replaced by a constant, those with fewer logical variables at
the beginning still have fewer logical variables. Therefore,
the PRV with minimum number of logical variables (which
should be chosen next to avoid grounding) is now the one
that used to have the minimum number of logical variables
at the beginning of the algorithm among those with at least
two logical variables. This PRV is exactly the one chosen
by MinTableSize, because MinTableSize sorts all PRVs with
at least two logical variables ascending for branching on.
Adaptation to Population Change
In relational models, varying population sizes are quite common (see some examples in (Kazemi et al. 2014)). To see
how each heuristic performs as the population sizes of the
logical variables change, we used four parfactor graphs of
Table 1 (6th, 10th, 12th and 13th parfactor graphs) and varied the population size of one of the logical variables to see
how the running time of lifted search-based inference with
different heuristics is affected. These four parfactor graphs
were chosen because different orders are suggested by different heuristics in most cases, and they have a logical variable where inference performance is highly dependent on its
population size. Results are shown in Figure 3 where the xaxis shows the population size of the logical variable being
changed and the y-axis shows time in seconds. We can see
868
150
80
min-fill
relational min-fill
population order
MinTableSize
100
min-fill
relational min-fill
population order
MinTableSize
60
40
50
20
0
0
5
10
15
20
0
25
0
10
20
(a)
30
40
50
(b)
250
1500
min-fill
relational min-fill
population order
MinTableSize
200
150
min-fill
relational min-fill
population order
MinTableSize
1000
100
500
50
0
0
5
10
15
20
0
25
(c)
1
2
3
4
(d)
5
6
7
Figure 3: Running time of lifted search-based inference as a function of population size for different heuristics. From Table 1,
these are (a) 6th parfactor graph, (b) 10th parfactor graph, (c) 12th parfactor graph, (d) 13th parfactor graph. In all cases the
x-axis is the population of y. The y-axis is runtime in milliseconds. In (a) min-fill and relational min-fill are overlapping. In (c)
MinTableSize and population order heuristics are overlapping. In (d) MinTableSize and min-fill are overlapping.
The analysis for PRVs with more logical variables is the
same.
minimum CFBF) n times. This gives a time complexity of
O(n2 ).
To find the next PRV to eliminate using min-fill or relational min-fill, we have to loop over all PRVs. In the i-th
iteration, we consider the parfactor f resulting from eliminating i-th PRV. Then we should have two nested loops over
the PRVs in f to count how many couples of PRVs in f have
not been already connected. This makes the time complexity of finding the next PRV to be O(n3 ). Since we do this n
times to find the total order, the time complexity of min-fill
and relational min-fill is O(n4 ), although enhancements are
possible for certain models (e.g. sparse graphs) by using (in
most cases) more memory (e.g. see (Kask et al. 2011)).
Even though the intuition behind population order heuristic helps avoiding to ground populations, the above proposition does not hold for this heuristic:
Example 6. Consider a parfactor graph with only one
parfactor {A(x), B(y, z)} and suppose |pop(x)| = 3000,
|pop(y)| = 50 and |pop(z)| = 50. Population order heuristic selects B as the first PRV to branch on because it has
a smaller CFBF than A. Since B has more than one logical
variable, the search-based inference algorithm grounds one
of the populations. This is a case when avoiding to ground a
population is possible but min-fill and relational min-fill end
up grounding a population.
Conclusion
Computational Complexity
Suppose there are n PRVs. According to Algorithm 1, in order to find the next PRV to eliminate using MinTableSize
heuristic, we have to loop over all PRVs twice. We have to
do this process n times to find the total order. This makes the
time complexity of MinTableSize O(n2 ).
For the population order heuristic, we proposed two different implementations. The time complexity of the first one,
which is sorting the PRVs according to their CFBFs at the
beginning, is the same as the time complexity of sorting
which is O(n log(n)). The other implementation, which determines the PRV with minimum CFBF at each step and
branches on it, does an O(n) process (finding the PRV with
We examined the importance of elimination ordering in
lifted first-order probabilistic inference and proposed three
heuristics for that. We showed empirically that the MinTableSize heuristic outperforms non-relational min-fill, which
is widely used for non-relational models, relational min-fill
and population order heuristics and also does a better job
of adapting itself to the changes in the population sizes of
logical variables. We presented an O(n2 ) algorithm, where n
represents the number of PRVs in the model, for this heuristic and proved that it will produce an order that results in not
grounding any population if there exists at least one such
order.
869
Acknowledgements
Milch, B.; Zettlemoyer, L. S.; Kersting, K.; Haimes, M.; and
Kaelbling, L. P. 2008. Lifted probabilistic inference with
counting formulae. In Proceedings of the Twenty Third Conference on Advances in Artificial Intelligence (AAAI), 1062–
1068.
Pearl, J. 1988. Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference. San Mateo, CA:
Morgan Kaumann.
Poole, D.; Bacchus, F.; and Kisynski, J. 2011. Towards completely lifted search-based probabilistic inference. arXiv:1107.4035 [cs.AI].
Poole, D. 2003. First-order probabilistic inference. In Proceedings of the 18th International Joint Conference on Artificial Intelligence (IJCAI-03), 985–991.
Rose, D. J.; Tarjan, R. E.; and Lueker, G. S. 1976. Algorithmic aspects of vertex elimination on graphs. SIAM Journal
on computing 5(2):266–283.
Sato, N., and Tinney, W. F. 1963. Techniques for exploiting
the sparsity of the network admittance matrix. Power Apparatus and Systems, IEEE Transactions on 82(69):944–950.
Tarjan, R. E., and Mihalis, Y. 1984. Simple linear-time algorithms to test chordality of graphs, test acyclicity of hypergraphs, and selectively reduce acyclic hypergraphs. SIAM
Journal on computing 13(3):566–579.
Zhang, N. L., and Poole, D. 1994. A simple approach to
Bayesian network computations. In Proceedings of the 10th
Canadian Conference on AI, 171–178.
This work was supported by NSERC. Thanks to David
Buchman for valuable feedback.
References
Arnborg, S.; Corneil, D. G.; and Proskurowski, A. 1987.
Complexity of finding embeddings in a k-tree. SIAM Journal
on Algebraic Discrete Methods 8(2):277–284.
Berry, A.; Blair, J. R.; Heggernes, P.; and Peyton, B. W.
2004. Maximum cardinality search for computing minimal
triangulations of graphs. Algorithmica 39(4):287–298.
Clautiaux, F.; Ngre, A. M. S.; and Carlier, J. 2004. Heuristic
and metaheuristic methods for computing graph treewidth.
RAIRO-Operations Research 38(1):13–26.
Cooper, G. F. 1990. The computational complexity of probabilistic inference using Bayesian networks. Artificial Intelligence 42(2-3):393–405.
Darwiche, A. 2001. Recursive conditioning. Artificial Intelligence 126(1-2):5–41.
de Salvo Braz, R.; Amir, E.; and Roth, D. 2005. Lifted firstorder probabilistic inference. In L. Getoor and B. Taskar
(Eds). MIT Press.
Dechter, R. 2003. Constraint Processing. Morgan Kaufmann, San Fransisco, CA.
den Broeck, G. V.; Taghipour, N.; Meert, W.; Davis, J.; and
Raedt, L. D. 2011. Lifted probabilistic inference by firstorder knowledge compilation. In Proceedings of International Joint Conference on AI (IJCAI), 2178–2185.
Getoor, L., and Taskar, B. 2007. Introduction to Statistical
Relational Learning. MIT Press, Cambridge, MA.
Gogate, V., and Domingos, P. 2010. Exploiting logical structure in lifted probabilistic inference. In Proceedings of Statistical Relational Artificial Intelligence.
Jha, A.; Gogate, V.; Meliou, A.; and Suciu, D. 2010.
Lifted inference from the other side: The tractable features.
Twenty-Fourth Annual Conference on Neural Information
Processing Systems (NIPS).
Kask, K.; Gelfand, A.; Otten, L.; and Dechter, R. 2011.
Pushing the power of stochastic greedy ordering schemes
for inference in graphical models. In AAAI.
Kazemi, S. M.; Buchman, D.; Kersting, K.; Natarajan, S.;
and Poole, D. 2014. Relational logistic regression. In Proc.
14th International Conference on Principles of Knowledge
Representation and Reasoning (KR).
Kjaerulff, U. 1985. Triangulation of graphs–algorithms giving small total state space. Technical report, Deptartment
of Mathematics and Computer Science, Aalborg University,
Denmark.
Koller, D., and Friedman, N. 2009. Probabilistic Graphical
Models: Principles and Techniques. MIT Press, Cambridge,
MA.
Larranaga, P.; Kuijpers, C. M.; Poza, M.; and Murga, R. H.
1997. Decomposing Bayesian networks: triangulation of the
moral graph with genetic algorithms. Statistics and Computing 7(1):19–34.
870