Generalized frequent episodes in event sequences
advertisement

Generalized frequent episodes in event sequences
Srivatsan Laxman, K.P.Unnikrishnan∗and P.S.Sastry
Dept. Electrical Engineering
Indian Institute of Science
Bangalore 560012, INDIA
Abstract
Discovering patterns in temporal data is an important task
in Data Mining. A successful method for this was proposed
by Mannila et al. [1] in 1997. In their framework, mining
for temporal patterns in a database of sequences of events is
done by discovering the so called frequent episodes. These
episodes characterize interesting collections of events occurring relatively close to each other in some partial order.
However, in this framework (and in many others for finding patterns in event sequences), the ordering of events in
an event sequence is the only allowed temporal information.
But there are many applications where the events are not instantaneous; they have time durations. Interesting episodes
that we want to discover may need to contain information
regarding event durations etc. In this paper we extend Mannila et al.’s framework to tackle such issues. In our generalized formulation, episodes are defined so that much more
temporal information about events can be incorporated into
the structure of an episode. This significantly enhances the
expressive capability of the rules that can be discovered in
the frequent episode framework. We also present algorithms
for discovering such generalized frequent episodes.
1.
INTRODUCTION
Data sets with temporal dependencies frequently occur in
business, engineering and scientific scenarios. Development
of data mining techniques specially suited for such data sets
is rapidly gaining momentum today (see, e.g., [1] and references therein). These data sets may often be viewed as logs
(or records) of events occurring in one or more sequences.
The goal of data mining here would be to identify patterns in
the form of some partially ordered collection of events that
are interesting or can serve some useful predictive function.
An often cited example of temporal data is the customer
transaction log in a grocery store. Each purchase by a customer may be regarded as an event in the transaction logs.
One can either maintain different transaction sequences for
∗
General Motors R&D Center, Warren, MI
Permission to make digital or hard copies of all or part of this work for
personal or classroom use is granted without fee provided that copies are
not made or distributed for profit or commercial advantage and that copies
bear this notice and the full citation on the first page. To copy otherwise, to
republish, to post on servers or to redistribute to lists, requires prior specific
permission and/or a fee.
Copyright 200X ACM X-XXXXX-XX-X/XX/XX ...$5.00.
different customers, or a single sequence for all the customers
put together. Discovering frequent (or popular) buying patterns from these transaction logs can be of great use to the
store [2, 3]. Another example for a temporal database is
an alarm sequence in a telecommunication network [1]. The
goal of data mining here would be to find relationships between alarms in the sequence. This would help in predicting
impending alarms and faults in an on-line analysis of the incoming alarm stream.
It is important to note that in both the examples cited
above, the data is viewed as a time-ordered sequence of
events. This ordering of events is the only temporal information that is used for defining patterns or episodes that
we want to discover through mining techniques. In other
words, the events logged are viewed as instantaneous, and
the duration of existence of an event is is not considered relevant for the discovery process. This is true of most temporal
data mining techniques today. There have been some recent
attempts to allow time durations for events while analyzing
temporal data [4] though such information does not seem
to have been used for defining what constitute interesting
sequential patterns.
There are many applications where the event duration can
often be a very important attribute. Consider, for example,
the logs of an assembly line in a manufacturing plant. At
every change in state of the line, we can log (as an event)
the current state along with its start time. This would
yield a temporal database in which each event is associated with (among other attributes) its duration of existence.
The assembly line could either be running (with the current
throughput metric logged as an attribute) or it could have
stopped for a variety of reasons, such as an electrical system malfunction, a mechanical system malfunction, a lunch
break or an end of shift. The role of data mining here would
typically be to discover patterns of frequent breakdown and
to suggest potential process improvements for achieving better throughputs and lower down times. The significance of
event durations in such applications cannot be overemphasized. For example, extended lunch breaks certainly do not
help the plant’s throughput! Or frequent short stoppages
due to a series of electrical system malfunctions could foretell a severe power problem in the plant. Clearly, many of
the interesting rules that we will want to discover (in this
assembly line example) require constructs with some timing information built into them. This motivates our idea
of introducing time durations and time intervals into the
definition of an episode.
In this paper we extend the approach of discovering fre-
0
5
10
E1 E3
E1
15
20
E2
25
TIME
30
35
E1
E2
40
45
E3
50
55
60
E4
65
E1
different kinds of valid time overlaps that successive events
in the sequence may possess.
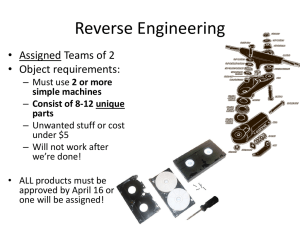
It is easy to see that the duration of the ith event (denoted
by ∆i ) in the event sequence (s, Ts , Te ), can be simply written as
70
E4
Figure 1: An event sequence
∆i = τi − ti ∀i.
quent episodes as discussed in [1] for incorporating time duration information into episodes. We propose the generalized
serial episode which incorporates explicit timing information
for the events that constitute it. In the sections to follow
we first define the generalized serial episode by associating
event durations with each node of the episode. Next we
present algorithms for discovering rules in this generalized
framework. We show that the algorithms described in [1]
for finding frequent serial episodes can be adapted to meet
our requirements. We then briefly discuss how we can easily extend our definition of the episode to incorporate time
intervals between nodes in an episode. We also discuss how
we can associate with each node, not just a single event, but
a collection of events. All these generalizations enhance the
expressive power of the rules that can be discovered in the
generalized serial episode framework.
2.
EPISODES AND SUBEPISODES
The problem we consider is the following. We are given a
time-ordered sequence of events with each event persisting
for some duration. We want to discover interesting patterns,
which will be called generalized serial episodes, that denote
some ordered collection of events that occur frequently in the
data sequence. The definition for episodes allows specification of both the events that constitute it and the duration
of such events. While the basic framework is similar to that
in [1], the main difference is in the incorporation of time
durations.
This section presents our definitions for the generalized
serial episode and its subepisode. Let E denote a finite set
of possible event types,
E = {E1 , E2 , . . . , EM }.
(1)
An event is defined as a triple (A, t, τ ), where A ∈ E, t is
the event start time (an integer) and τ is the event end time
(also an integer). We shall require of t and τ that τ > t in all
events. It is important to note that unlike in [1] the events
here are not instantaneous and hence require (for their full
specification) both start and end times.
An event sequence on E is simply an ordered collection of
events and is represented by the triple (s, Ts , Te ), with Ts
and Te fixing the lower and upper time extremities for the
sequence and
s = {(A1 , t1 , τ1 ), (A2 , t2 , τ2 ), . . . , (An , tn , τn )}
(2)
where Ai ∈ E & ti , τi ∈ [Ts , Te ], 1 ≤ i ≤ n, and ti ≥
ti−1 , 2 ≤ i ≤ n. Clearly, our definition of the event sequence allows for successive events in it to occur in either
one of simultaneous, disjoint or partially overlapping time
intervals. These notions do not exist when the events in the
sequence are viewed as instantaneous as in [1].
Fig. 1 illustrates a typical example for an event sequence.
The line segments represent the time intervals in which the
events occur. The number above each line segment corresponds to the event’s duration of occurrence. Notice the
(3)
In the manufacturing plant example that we considered in
Section 1, the event sequence basically describes the state
of the line as a function of time, with the state at any given
instant being fully specified by the conjunction of all event
types that occur simultaneously (at that instant). For example, there could well be a simultaneous breakdown of different subsystems, each being denoted by a separate event
in the sequence. An important special case of our event sequence would be one where we have ti+1 = τi , ∀i. This
would be the case for our manufacturing system example
if the event type definition is such that only one type of
event can exist at any given time. By incorporating event
start and end times in our event sequences, we expect to be
able to define and discover episodes with greater expressive
capability in them.
A window on the event sequence (s, Ts , Te ) is simply a
time slice from that sequence and is specified by another
triple (w, ts , te ). The window may be regarded as an event
sequence in its own right. ts and te are the window’s time extremities and w is an appropriate contiguous slice of events
from s.
It is important however to note that events in s that start
after ts but terminate only beyond te need to be dropped
out of w. For example, for the event sequence specified in
Fig. 1 the window (w, 0, 10) includes the event (E4 , 06, 08)
but excludes (E2 , 06, 12) and (E1 , 06, 15), since their end
times go beyond the upper extremity of the window.
2.1 The generalized serial episode
We are now ready to define the generalized serial episode
along the same lines as the serial episode definition of [1].
We can think of the episode1 as a finite ordered collection of
nodes. Each node is associated with an event type and a collection of time intervals (which describe the event duration
possibilities for that node).
Let B = {B1 , . . . , BK } denote a collection of time intervals. Recall that E is the set of possible event types.
The generalized serial episode is defined as a quadruple α =
(Vα , <α , gα , dα ). Vα is a finite collection of nodes and <α
specifies a total order over it. gα and dα are both 1-1 maps
where gα : Vα → E specifies the rule for associating an event
type with each node and dα : Vα → 2B maps each node to
the possible event durations that episode α allows. As a
notation, we denote the number of nodes in Vα by n.
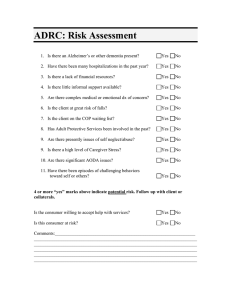
Fig. 2 pictorially depicts a few example episodes. The
event type associated with a node is written inside the circle that represents it. The set written directly below each
node represents the subset of 2B to which (the episode’s) dα
maps that node. In these examples, we have chosen the collection of time intervals as B = {[0, 3], [4, 7], [8, 11], [12, 15]}.
It is important to observe that α2 and α4 represent different episodes, purely on the basis of having different timing
information (i. e. different d(·) maps). Having proposed this
modified definition for the episode, the most natural ques1
From here on the term “episode” always refers to the generalized serial episode.
“α1 ”
“α2 ”
n
n
E2
E2
{[0, 3], [8, 11]}
{[0, 3], [4, 7], [12, 15]}
α (s, Ts , Te ) and β α =⇒ β (s, Ts , Te ).
B \ {[0, 3]}
E1
- En
4
B
B
n
E2
{[0, 3], [8, 11]}
- En
3
{[12, 15]}
hβ (v) = hα (fβα (v)) ∀v ∈ Vβ .
- En
1
B \ {[12, 15]}
B
- En
4
{[0, 3], [4, 7]}
3. SIMILAR AND PRINCIPAL EPISODES
Figure 2: Some example episodes
tion to ask next is when does such an episode occur in a
given event sequence?
Consider an episode α = (Vα , <α , gα , dα ). Let the number of nodes in α (i. e. |Vα |) be n. The episode α is
said to occur in the event sequence (s, Ts , Te ) if ∃ a 11 hα : Vα → {1, . . . , n} such that the following conditions
hold ∀v, w ∈ Vα :
Ahα (v) = gα (v),
∃b ∈ dα (v) such that ∆hα (v) ∈ b and
v <α w in Vα =⇒ thα (v) thα (w) in s.
(4)
(5)
(6)
The occurrence of episode α in the event sequence (s, Ts , Te )
is written as α (s, Ts , Te ). It can be immediately seen that
among the example episodes defined in Fig. 2 all except
α4 occur in the example event sequence of Fig. 1. Also,
since a window in (s, Ts , Te ) may be viewed as an event
sequence on its own, the same definitions are used to determine whether or not an episode occurred in a window of
(s, Ts , Te ) as well. Observe that α1 , α2 , α3 and α5 all occur
in the window (w, 0, 10) itself.
2.2 The subepisode
Consider an episode α = (Vα , <α , gα , dα ). An episode
β = (Vβ , <β , gβ , dβ ) is said to be a subepisode of α (written β α) if ∃ a 1-1 fβα : Vβ → Vα such that ∀v, w ∈ Vβ
we have:
gα (fβα (v)) = gβ (v),
(7)
dα (fβα (v)) ⊆ dβ (v), and
(8)
v <β w in Vβ =⇒ fβα (v) <α fβα (w) in Vα . (9)
Basically, according to our definition of the subepisode, it
does not suffice if just the relative ordering of events in the
candidate subepisode matches that of the episode (which is
the case in [1]). In addition, we also require that the timing
constraints on the events of the candidate subepisode must
be consistent with what those in the episode itself would
allow. Notice that while α1 6 α2 we have α3 α5 and
α2 α4 in Fig. 2.
Strict subepisodes, i. e. β α and β 6= α, are denoted by
β ≺ α. When β α we will sometimes prefer to say that
α is a superepisode of β (written α β)2 . Also, from the
2
Strict superepisodes are similarly denoted like α β.
(11)
This is a “suitable” map hβ (·) which demonstrates that β (s, Ts , Te ).
“α5 ”
n
E2
(10)
Since α (s, Ts , Te ) there is a “suitable” hα : Vα →
{1, 2, . . . , n} and since β α there is also a “suitable” fβα :
Vβ → Vα . Thus, we can simply define a new map hβ :
Vα → {1, 2, . . . , n} as
“α4 ”
“α3 ”
n
definitions thus far it can be easily see that
- En
3
With definitions for the episode, subepisode and occurrence of an episode now in place, we proceed to introduce
the important concepts of similar and principal episodes. It
is by virtue of these concepts that our framework for rule
discovery becomes both interesting and feasible. These ideas
are closely tied to the notion of frequency of an episode in
an event sequence.
Consider an event sequence (s, Ts , Te ). For the sake of
notational succinctness this event sequence triple is denoted
by S. Let λS (α) represent some measure of how often α
occurs in the event sequence S. This could be based either
on the number of occurrences of α, or on the number of
windows of S which contain α (both in the same sense as
in [1]) or on just any other consistent frequency measure.
Whatever the definition of λS (α) we shall require of it the
property that
β ≺ α =⇒ λS (β) ≥ λS (α)
(12)
i. e. in a given event sequence, the subepisodes are always at
least as frequent (if not more frequent) as their corresponding superepisodes. This is a very important property which
needs to be exploited well in order to facilitate efficient rule
discovery using frequent episodes.
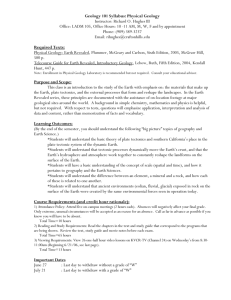
We now motivate the idea of similar and principal episodes
by examining the occurrence (in the event sequence example
of Fig. 1) of some simple episodes defined in Fig. 3. Notice
that all the episodes have identical event type assignments
i. e. they have the same gα (·) maps. However, since the
episodes describe events with different timing information
they differ in their dα (·) maps. Let us represent the event
sequence in Fig. 1 by S. Further, in this example, our choice
for the λS (·) function is simply the number of occurrences
(of the episode) in the event sequence S.
3.1 Similar episodes
First we consider the βi ’s in Fig. 3. Since β3 ≺ β2 ≺ β1 ≺
β0 and since β0 S it can be inferred (from Eq. 10) that
βi S 0 ≤ i ≤ 3. The βi ’s differ only in the durations that
they allow for the second node (with event type E1 ). As
more and more intervals are deemed allowed in the episode,
we naturally expect the episode frequency to increase in S.
This can be readily seen from Eq. (12). By counting the
number of occurrences in S (i. e. the event sequence in Fig. 1)
we find that, for the βi ’s in Fig. 3
λS (β3 ) = λS (β2 ) > λS (β1 ) > λS (β0 ).
(13)
Essentially, with respect to their frequencies of occurrence
in S, the episodes β2 and β3 are indistinguishable. Such
episodes are referred to as being similar in S. It can be
“β0 ”
n
E3
cipal episode is one in which each time interval in each event
duration set (of the episode) has earned its place by virtue
of a strictly positive contribution to the episode’s frequency
in the event sequence.
An episode α∗ is said to be principal in an event sequence
S if the following two conditions hold:
- En
1
{[4, 7]}
{[4, 7]}
“β1 ”
E3
- En
1
{[4, 7]}
n
{[4, 7], [8, 11]}
α∗ S and
∗
(17)
S
∗
@α α such that α ∼ α .
“β2 ”
n
E3
{[4, 7]}
- En
1
B \ {[12, 15]}
“β3 ”
E3
- En
1
{[4, 7]}
n
B
Figure 3: Similar and principal episodes
likewise verified that among the γi ’s in Fig. 3 the episodes
γ1 and γ2 are also similar in S. In fact, of the episodes
defined in Fig. 3 the pairs {β2 , β3 } and {γ1 , γ2 } are the only
sets of similar episodes with respect to the event sequence
S. It is important to note that unlike in the case of episodes
and subepisodes, similar episodes are always defined with
respect to a given event sequence only. Two episodes are
said to be similar if they are identically defined except for
the fact that one allows some more time intervals (for the
event durations) than the other, and if their frequencies of
occurrence are equal in the given event sequence.
Let us now formally define the concept of similarity between episodes in an event sequence. Two episodes α and
β are said to be similar in the event sequence S (written
S
α ∼ β) if all of the following hold:
α β or β α,
|Vα | = |Vβ | and
λS (α) = λS (β).
(14)
(15)
(16)
It is clear that every episode α is trivially similar to itself
(reflexive). From Eqs. (14)–(16) it is also evident that if
S
S
α ∼ β then β ∼ α (symmetric). Further, it is also easy
S
S
S
to show that if α ∼ β and β ∼ γ then α ∼ γ (transitive).
Similarity between episodes (in a given event sequence) is
therefore an equivalence relation over the set of all episodes.
3.2 The principal episodes
Consider once more the example episodes of Fig. 3. The
event duration sets in all those episodes, except for β3 and
γ2 , have the property that on removing any one time interval (or more) from any of them, the frequency of the corresponding episode (in the event sequence S defined in Fig. 1)
reduces by a strictly non-zero quantity. In other words, the
additional time intervals that β3 and γ2 permit (compared
to say those permitted by β2 and γ1 respectively) for the durations of their second nodes are clearly not interesting given
the event sequence S. We therefore wish to keep episodes
like β3 and γ2 out of our rule discovery process. This leads
us to the idea of principal episodes. Simply speaking, a prin-
(18)
It can be easily verified that all episodes in Fig. 3 excluding β3 and γ2 (and including δ0 ) are principal in the event
sequence of Fig. 1. Notice that as was the case with similar
episodes, the notion of principal episodes is also always tied
to a specific event sequence.
The similarity relation (being an equivalence relation) partitions the space of all episodes into equivalence classes. The
episodes within each class are similar to one another. There
will exist exactly one principal episode in each partition. All
the other episodes in the partition can in fact be generated
by appending time intervals (that do not contribute to the
eventual episode frequency) to the event duration sets of the
principal episode.
When we are concerned with finite length event sequences,
the space of all possible episodes that can occur in the sequence is definitely finite. Similarity with respect to the
event sequence naturally yields a finite partitioning of this
episode space. Each partition has exactly one principal
episode which may be regarded as the generator of that
equivalence class. Therefore it is guaranteed that the collection of all principal episodes in a given finite length event
sequence is always a well defined and finite set.
Subepisodes of principal episodes are in general not principal. Indeed, the non-principal episodes in each partition of
our similarity-based quotient space are after all subepisodes
of the partition’s generator (or principal episode). However,
all subepisodes generated by dropping nodes (rather than
by appending time intervals to the d(·) sets) of a principal episode are most certainly principal. Consider an l-node
principal episode α∗l . Let α∗l−1 be an (l −1)-node subepisode
of α∗l obtained by dropping one of its nodes (and keeping
everything else identical). Recall that every time interval
in the d(·) sets of α∗l contributes a strictly positive quantity to its frequency in the (given) event sequence (say S).
Therefore, dropping a time interval from the d(·) set of a
node in α∗l will reduce its frequency by a strictly positive
quantity. Removing the same time interval from the corresponding node in α∗l−1 will naturally cause a similar fall in
frequency since α∗l−1 S every time α∗l S. This shows that
there can be no “redundant” time intervals in the d(·) sets
of α∗l−1 (and therefore it is also principal in S). This is a
very important property which needs to be exploited during
the candidate generation step (in Algorithm 3) of our rule
discovery process.
4. DISCOVERING RULES
We are now ready to describe the rule discovery process
in our generalized framework. It is very much in the same
lines as in [1] except that we work with the collection of
frequent principal episodes FS∗ rather than just the set of
frequent episodes FS in the event sequence S. In this section
we describe the various algorithms that constitute our rule
discovery process. Each of these algorithms is an adaptation
of its counterpart in [1]. For completeness, we provide all
the algorithms here. However, to keep the discussion brief,
we only indicate the prominent differences with respect to
the algorithms in [1] in each case. Thus, this section assumes
that the reader is familiar with the algorithms in [1].
4.1 The rules
Let FS∗ denote the set of all frequent principal episodes
in S. We are looking for rules like β ∗ → α∗ , where β ∗ ≺
α∗ and α∗ , β ∗ ∈ FS∗ . To obtain such rules we need to
first compute all the frequent principal episodes in the event
sequence S. For each frequent episode-subepisode pair, we
declare that the subepisode implies the episode if the ratio of
their frequencies of occurrence in the event sequence exceeds
a threshold. This is what Algorithm 1 does. The important
difference with respect to the algorithm proposed in [1] is
that here the episodes and subepisodes considered for rule
discovery are all not just frequent but also principal in S.
Algorithm 1 To discover rules based on the frequent principal episodes of an event sequence
Input: Set E of event types, event sequence S, set E of allowed
episodes, window width bw , minimum frequency λmin , minimum confidence ρmin , set B of allowed time intervals
Output: Rules that hold in S
1: /∗ Find set FS∗ of all frequent principal episodes in S ∗/
2: Compute FS∗ using Algorithm 2
3: /∗ Generate rules ∗/
4: for all α∗ ∈ FS∗ do
5: for all β ∗ ∈ FS∗ such that β ∗ ≺ α∗ do
6:
if (λS (α∗ )/λS (β ∗ )) ≥ ρmin then
7:
Output the rule β ∗ → α∗
4.2 The frequent principal episodes
The process of computing the set of frequent principal
episodes is incremental and is done through Algorithm 2.
We start with the set C1 of all possible 1-node episodes. F1∗ is
the collection of frequent principal episodes in C1 . Once F1∗
is obtained, the collection C2 of candidate 2-node episodes
is generated from it. This incremental process of first obtaining Fl∗ from the candidates in Cl and then generating
Cl+1 from Fl∗ is repeated till the set of new candidates generated is empty. The crucial step here is to designate an
episode as a candidate only if all the subepisodes obtained
by dropping a node from it have already been declared as
being both frequent and principal.
4.3 Candidate generation
The candidate generation (i. e. Algorithm 3) is also along
the same lines as that in [1]. The l-node frequent principal episodes are arranged as a lexicographically sorted collection Fl∗ of l-length arrays (of event types). However,
the ith episode in the collection now needs two components
for its specification – the first is Fl∗ [i].g[j] which refers to
the event type association for j th node, and the second is
Fl∗ [i].d[j] which stores the collection of intervals associated
with the j th node, the kth element of which is denoted by
Fl∗ [i].d[j][k]. The episode collection is viewed as to be constituted in blocks (like in [1]) such that within each block in
Fl∗ the first (l − 1) nodes are identical i. e. both the event
type as well as the timing information of the first (l − 1)
nodes are the same for the episodes in a block. Potential
(l + 1)-node candidates are constructed by combining two
Algorithm 2 To compute the set of frequent principal
episodes in an event sequence
Input: Set E of event types, event sequence S, set E of allowed
episodes, window width bw , minimum frequency λmin , set B
of allowed time intervals
Output: Set FS∗ of all frequent principal episodes in S
1: Initialize FS∗ = φ
2: /∗ Construct set C1 of 1-node candidate episodes ∗/
3: Compute C1 = {α ∈ E such that |α.g| = 1}
4: Initialize l = 1
5: while Cl 6= φ do
6: /∗ Obtain set Fl∗ of all l-node frequent principal episodes
∗/
7: Compute Fl∗ = {α ∈ Cl such that λS (α) ≥ λmin &
α is principal in S} using Algorithm 4
8: /∗ Obtain set Cl+1 of all (l + 1)-node candidate episodes
∗/
9: Compute
Cl+1 = {α ∈ El+1 such that ∀β ≺ α with |β.g| < l
∗
we have β ∈ F|β.g|
}
using Algorithm 3
10: Update l = l + 1
11: for all l do
S
12: Update FS∗ = FS∗ Fl∗
∗
13: Output FS
episodes within a block. The newly constructed (l + 1)-node
episode is declared a candidate only if every subepisode generated by dropping one of its nodes is already known to be
principal and frequent (and hence must have been found in
Fl∗ ).
4.4 Counting frequencies of principal episodes
We now need an algorithm that can compute the frequency of the candidates that have been generated. Algorithm 4 implements a frequency computing scheme. The
episode frequency is defined based on the number of windows of the event sequence that contain the episode. This
is identical to the frequency definition used in [1]. Since our
episodes and their occurrence in an event sequence are essentially generalizations of the concepts defined in [1], the
basic idea of using finite state automata to recognize episode
occurrences continue to be very useful. However, the exact initialization and updating procedures for the automata
differ slightly to account for our generalizations. In Algorithm 4, waits(A, δ) (rather than the waits(A) of [1]) stores
(α, i) pairs, indicating that an automaton for episode α is
waiting in its ith state for the event type A to occur with a
duration in the δ time interval. This is the main difference
between the algorithm proposed in [1] and our algorithm
here. All the other structures have identical functions in
both the algorithms. The number of windows of S that contain α is stored in α.f req. (α, j) ∈ beginsat(t) indicates
that an automaton for α has reached its j th state at time
t. trans stores the various automata transitions in the current window shift. Each element in trans is a triple (α, j, t)
implying that an automaton for α that was initialized at
time t has transited to state j in the current window. An
important step in Algorithm 4 (that was not needed in its
counterpart in [1]) is the check for principal episodes. Once
all the frequencies have been computed, an l-node episode
is declared as principal only if all its l-node superepisodes
differ in frequency with respect to itself.
It can be seen that this principal episode check in Algorithm 4 is the only serious computational overhead that our
Algorithm 3 To generate (l + 1)-node candidates from lnode frequent principal episodes
Input: Set Fl∗ of appropriately sorted l-node frequent principal
episodes, set B of allowed time intervals
Output: Set Cl+1 of appropriately sorted (l + 1)-node candidate
episodes
1: Initialize Cl+1 = φ and k = 0
2: if l = 1 then
3: for h = 1 to |Fl∗ | do
4:
Initialize Fl∗ [i].BlkStart = 1
5: for i = 1 to |Fl∗ | do
6: Initialize CurrentBlkStart = k + 1
7: for (j = Fl∗ [i].BlkStart;
Fl∗ [j].BlkStart = Fl∗ [i].BlkStart; j = j + 1) do
8:
/∗ Fl∗ [i] and Fl∗ [j] have their first (l − 1) nodes common
∗/
9:
/∗ Build a potential candidate α from these two ∗/
10:
for x = 1 to l do
11:
Assign α.g[x] = Fl∗ [i].g[x] and α.d[x] = Fl∗ [i].d[x]
12:
Assign α.g[l + 1] = Fl∗ [j].g[l] and α.d[l + 1] = Fl∗ [j].d[l]
13:
/∗ Build and test subepisodes of α ∗/
14:
for y = 1 to (l − 1) do
15:
for x = 1 to (y − 1) do
16:
Assign β.g[x] = α.g[x] and β.d[x] = α.d[x]
17:
for x = y to l do
18:
Assign β.g[x] = α.g[x + 1] and β.d[x] = α.d[x + 1]
19:
if β 6∈ Fl∗ then
20:
Goto next j in line 8
21:
Update k = k + 1
22:
Assign Cl+1 [k] = α and
Cl+1 [k].BlkStart = CurrentBlkStart
23: Output Cl+1
rule discovery process has when compared to the algorithms
in [1]. This, and of course, the natural swelling of the set
of all episodes due to the inclusion of timing information
in them, are the only significant sources for the additional
computational cost that we need to bear.
5.
DISCUSSION
In this paper our objective is to show how the framework
for discovering frequent episodes, due to Mannila et al. [1],
can be extended to handle applications where time durations
of events is an important attribute. As briefly outlined in
Section 1, being able to include time durations of events
is useful, e.g., in analyzing failure modes of manufacturing
processes. The framework presented here is being developed
specifically to handle such an application.
At the level of formalism, the main change needed is the
incorporation of event durations explicitly in the definition
of episodes. Thus, in defining the generalized serial episode
(cf. Section 2.1), in addition to the node set, Vα , the total
order <α , and the map gα that assigns an event type to
each node, we also included dα that prescribes the allowable
time durations for events associated with different nodes.
Given that the data of event sequence contains time durations of events, it is now fairly straight forward to count the
frequency of such generalized events. However, incorporation of dα results in a structure whereby interesting frequent
episodes now become equivalence classes rather than single
episodes. This is the reason we defined the concept of principal episodes in Section 3 so that the search for frequent
episodes does not return too many redundant ones.
The main computational task here is to discover all frequent principal episodes. The algorithms presented follow
essentially the same strategy as in [1], namely, constructing
frequent episodes of progressively increasing length starting with episodes of length one. However, the inclusion
of dα and the need to ensure that only principal episodes
are considered as candidates, together imply that the algorithms presented in [1] need to be modified. As explained in
Section 4, the needed modifications are easily implemented
without too much additional computational burden.
It may be worth noting that the structure developed here
is a strict generalization of the serial episodes discussed in
[1]. If we always choose dα as the set of all possible time
durations, then we essentially get back the serial episodes of
[1].
There are some modifications to the structure of generalized serial episodes that are easily implemented and which
enhance the expressive capabilities of the formalism. We
briefly describe two such modifications below.
We can associate more than one event type with each node
in defining episodes. This is done by making the gα a function from Vα to 2E . That is, both gα and dα would become
set-valued functions now. This would make our generalized
serial episodes to include some parallel episodes as defined
in [1] as well, in addition to being a strict generalization of
serial episodes. However, this would not result in a structure
that is a strict generalization of parallel episodes also. Our
structure would not be able to include all parallel episodes of
[1] though it would contain episodes that are not expressible
either as serial episodes or as parallel episodes. For example,
consider a two node episode where the first node is associated with the set {A, C} and the second node is associated
with {B}. This would represent a pattern of either A or C
but not both occurring before B. Such an episode cannot
be represented in the formalism of [1]. On the other hand,
in our formalism, we cannot represent the episode that says
both A and C should occur, in any order, before B, as a
single episode.
Discovering such generalized episodes is also easily done.
We have explained in Section 3 that because dα is a setvalued function, one can construct subepisodes that are not
interesting by simply tagging more time intervals with each
node. That is why we defined the concept of principal
episodes. In a similar way, when gα is a set-valued function,
we can make uninteresting subepisodes by simply tagging
irrelevant event types with each node. Hence, we need to
modify our definition of similar and principal episodes to
take care of this redundancy due to the new set-valued gα
function also. This is done easily. Now the modifications
needed for the algorithms would be similar to what we have
done to take care of the requirements due to presence of dα
in our generalized serial episodes.
There is another direction in which we can extend the
formalism presented here. In the generalized serial episode
framework presented here, we have included only intra-event
time durations. That is, for an episode to occur in an
event sequence, the only additional constraints here are in
terms of duration of individual events. Another kind of constraint that may be relevant in applications is in terms of
the time interval between successive events in the episodes.
This is very easily done by changing the definition of ∆i to
∆i = ti+1 − ti in Eq. (3). Now the dα function prescribes
constraints on the duration between starting times of successive events. The only modification needed in the algorithms
now is in the part where we decide whether an episode has
occurred in an event sequence while counting the frequency.
As is easy to see, we can extend our structure to take care
of both intra-event and inter-event time constraints. In the
definition of an episode, instead of having only one function
dα , we can have two functions, say, d1α and d2α , one to take
care of intra-event time constraints and another to take care
of inter-event time constraints.
Thus, the structure proposed in this paper allows one to
discover episodes or patterns in which information regarding time durations of events can form an important part.
Most of the currently available data mining techniques do
not allow for this though such a capability may be useful in
analyzing data pertaining to many engineering processes. It
is in this sense that we feel our extension of the framework
of Mannila et al. [1] is significant in enriching the expressive
capabilities of the technique of discovering frequent episodes.
Acknowledgements
The work reported here is supported in part by project
funded by GM R&D Center, Warren, through SID, IISc,
Bangalore.
6.
REFERENCES
[1] H. Mannila, H. Toivonen, and A. I. Verkamo,
“Discovery of frequent episodes in event sequences,”
Data Mining and Knowledge Discovery, vol. 1, no. 3,
pp. 259–289, 1997.
[2] R. Agrawal and R. Srikant, “Mining sequential
patterns,” in 11th Int’l Conference on Data
Engineering, Taipei, Taiwan, Mar. 1995.
[3] R. Srikanth and R. Agrawal, “Mining generalized
association rules,” in The 21st VLDB Conference,
Zurich, Switzerland, Sept. 1995.
[4] R. Villafane, K. A. Hua, D. Tran, and B. Maulik,
“Mining interval time series,” in Data Warehousing and
Knowledge Discovery, 1999.
Algorithm 4 To generate the set of all l-node frequent principal episodes from the set of l-node candidates
Input: Set C of (candidate) episodes, event sequence S =
(s, Ts , Te ), window width bw , minimum frequency λmin
Output: Subset F (of C) of frequent episodes in the sequence S
1: for all α ∈ C do
2:
for i = 1 to |α.g| do
3:
Initialize α.init[i] = 0
4:
for all δ ∈ α.d[1] do
5:
Initialize waits(α.g[i], δ) = φ
6: for all α ∈ C do
7:
for all δ ∈ α.d[1] do
8:
Update
S
waits(α.g[1], δ) = waits(α.g[1], δ) {(α, 1)}
9:
Initialize α.f req = 0
10: for t = Ts − bw to Ts − 1 do
11:
Initialize beginsat(t) = φ
12: for start = Ts − bw + 1 to Te do
13:
/∗ Start of new window∗/
14:
Initialize beginsat(start + bw − 1) = φ and trans = φ
15:
for all (A, t, τ ) ∈ s such that τ = start + bw − 1 and
(τ − t) ≤ bw do
16:
Assign d = {b ∈ B such that (τ − t) ∈ b}
17:
for all (α, j) ∈ waits(A, d) do
18:
if j = |α.g| and α.init[j] = 0 then
19:
Assign α.inwindow = start
20:
if j = 1 then
S
21:
Update trans = trans {(α, j, t)}
22:
else
S
23:
Update trans = trans {(α, j, α.init[j − 1])}
24:
Update
beginsat(α.init[j − 1]) = beginsat(α.init[j −
1]) \ {(α, j − 1)}
25:
Reset α.init[j − 1] = 0
26:
for all δ ∈ α.d[j] do
27:
Update waits(A, δ) = waits(A, δ) \ {(α, j −
1)}
28:
for all (α, j, t) ∈ trans do
29:
Update α.init[j] = t
S
30:
Update beginsat(t) = beginsat(t) {(α, j)}
31:
if j < |α.g| then
32:
for all δ ∈ α.d[j] do
33:
Update
S waits(α.g[j + 1], δ) = waits(α.g[j +
1], δ) {(α, j + 1)}
34:
for all (α, j) ∈ beginsat(start − 1) do
35:
if j = |α.g| then
36:
Update α.f req = α.f req + start − α.inwindow
37:
else if α.init[j] = start − 1 then
38:
for all δ ∈ α.d[j + 1] do
39:
Update waits(α.g[j + 1], δ) = waits(α.g[j +
1], δ) \ {(α, j + 1)}
40:
Reset α.init[j] = 0
41: /∗ Output ∗/
42: Initialize F ∗ = φ
43: for all α ∈ C such that α.f req/(Te −Ts +bw −1) ≥ λmin
do
44:
for all β α do
45:
if β.f req = α.f req then
46:
Skip to next S
α in line 43
47:
Update F ∗ = F ∗ {α}
48: Output F ∗