.The Starting C o n d i t i... J3y Prof. A. Say, D F. N. Mowdawalla, M.A., s. so. INTKODUCTIOII.
advertisement

.The Starting Conditions in Synchronous Machines.
J3y Prof. A. Say, D sc., M.I.E.E., and
F. N. Mowdawalla, M.A., s. so.
INTKODUCTIOII.
In view of the growing popularity and importance of
the synchronous motor as one of the standard types of motor
available for power distribution purposes, and its increasing use
as a means of improving the power factor of a load, no apology
seems necessary for a paper containing a detailed study of the
behaviour of such a motor during what has always been regarded
as a somewhat critical period—oiz. s the period when the motor is
being accelerated from, rest to synchronous speed. The subject
is by no means a new one, and has already been dealt with by
several writers ; not, however, in a manner sufficiently thorough
and exhaustive to make farther contributions to it superfluous,
and one of the main objects of the present paper is to explain a
number of hitherto somewhat obscure points, and to draw attention to others which have not previously been noticed.
REVIEW OF PREVIOUS WORK ON THE SUBJECT.
. The earliest paper specially devoted to a study of the
starting conditions in synchronous machines appears to bfe one
read in 1912 before the American Institute of Electrical Engineers by C.. J, Fechheimer.* In this the author, after some
general introductory remarks, gives an account of experiments
made to determine (1) the relation connecting the starting torque
With the impressed p. d. under various conditions and (2) the
variation of torque, current and power factor with speed, whjle
the rotor is accelerated from rest, a constant p. d. being maintained across the stator terminals- The experimental results are
embodied in an interesting series of curves. Among the questions
discussed by the author aro the desirability or otherwise of keeping the field circuit open during' the acceleration period, and thie
tendency of certain synchronous machines to run in the neighbourhood of half the speed of synchronism. Fechheinier's paper
gave rise to a very interesting discussion.
*C. J- Feohheimer : Proceedings of the American Institute of Electrical
Engineers, Vol. 31, pp, -305 and 194^ (1912).
(19)
20
In 1913 E. Rosenberg* read a paper on Self-Synchronising1 Machines before, the Institution of JKlodrinil Engineers,
in which he considered, among °ther things, tlm occurrences
during the starting1 period, and discussed in some detail the
behaviour of the machine towards the end of the acceleration
period, just before it is pulled into synchronism. I f may be
mentioned that in the discussion on l< % echheimer's paper, it was
stated by B. GK Lamme that it was " d i f f i c u l t f o sc-e just \vhaHs
going on in the motor at the instant it pulls into K y n f h r o n i . n i " .
So far as the authors are aware, Kostmberg's was the first attempt
to furnish a detailed explanation of the action in question.
The next contribution to the subject is one by F. 1 ) .
JSTewbury, In the form of a paper mad before f h c American
Institute of Electrical Engineers in .June liM.'i.t 'I he main
interest of this paper lies in t h e oseillngraphic ree-mis which
are given of the; starling period.
Ln December 1917 the authors of the, present paper
published, in the "Journal of t h e I n d i a n I n s t i t u t e of Science,"
an account of some experimental investigations oi1 t i n * ocrm-rein-en
during the starting period of a synchronous- machine, and a f u l l
theoretical discussion of the type of i n d u c t i o n Motor whose >tal<»r
is supplied with polyphase currents, and \vhow» rotor in providi-il
with a Hingle-ma^ni^tic-axis winding.
The, most recent addition to t h e literature of the Mibj«r!
is an article by Theo. Sc-hou in tlio " Klectrieal World " uf A p r i l
6th, 191H (Vol. 7 J , p. 71 !•). In this artu-li* the a u t h »r points (Hit,
that a satisfactory s(;lf-8tarting synchronous motor x h o t t M partake
of fclw. 1 ! cliaractci'isticH of both an I n d u c t i o n Motor and an A l t e r n a tor, and should present features of design i n t r n n e d i n t e ln-!ween
these two classes of machines. He accordingly jidvocates t i n 1 u^«
of a shorter air gap and longer polar arc t h a n an* ••uM.'»mary in
alternators of standard (U'.si«rn. i h ; f u r t h e r <iiLru«^t> t h * - use of
tnatf^rials having a pronounced skin eftec't for t h « M | t u n v l - r > t m i '
winding's of self-start ing synehrr>nous niot«»iN* H I M . |i<jmN * < u f f } » i «
aclvanf-ag(»s of part-slot windings in mlucin-.. Hie t r o u b l e ^
from dead points.
I SO'.
*K. Fingcriberg: Solf-SyiicliroiiiHinj? MuchiufiH Juiirnal -«f th»- I n H f i m t i n n of
nginecsrs, Vol. .M. ]>. »VJ (lf'11;.
tTranawtiorm of the Aiuorioan IiiBl-ituto of Kh-cfnVal Knirinn-rK V»l '.Kt t».
JThc utiliaatio?! of tli« skin (;fFcof, in tho rotor noiuim-t-.h •,: in»!u«-fina
Motors was patunted by J[. M. JioUrt in HiOo.
21
TORQUES CONCERNED IN ACCELERATING- THE MOTOR AND
IN PULLING- IT INTO SYNCHRONISM.
The self-starting synchronous motor is accelerated and
finally pulled into synchronism by the action of a number of
torques, differing widely from each other, and the resultant effect
of which will largely depend on their relative importance. Cases
may arise where, owing to the preponderance of a certain type of
component torque, it may be impossible to get the machine to
run up to synchronous speed. Again, i l i e torques concerned in
the initial acceleration of the rotor are quite distinct from the
torque which finally pulls it into synchronism. The authors are
of opinion that no really clear understanding of the occurrences
during the starting period is attainable without a derailed study
of the various torques which act on the rotor during that period.
Tt will accordingly be necessary to consider the nature of the
various torques concerned. These torques may be classified as
follows :—
(1) Torque due to varying magnetic reluctance (synchronous torque).
(2)
Torque due to hysteresis.
(3)
Torque due to starting- squirrel-cage or damping
coils if present.
('I-)
Torque due to currents induced in the field winding1,
if this winding is closed.
(5)
Torque duo to eddy currents.
/.
Torque due io Varying Maf/nciic Reluctance.
Tt is a well-known general principle of electro-magnetism that, any electro-magnetic system which includes a movable
member tends to assume a configuration which corresponds to
minimum reluctance and therefore maximum flux. Displacements of the movable member from the position of minimum
reluctance call into play forces tending to restore it to that position. The application of this general principle to the special case
of a salient pole, rotor, which is acted on by the rotating field of
the stator, will be easily undoistood by reference to Eig. 1. In
this figure three fliffero»t positions of one of the rotor poles are
shown relatively to ihe stator polar surfaces. The centre of the
stator polar surface is in each case marked with the letter N. In.
J'%. 1 (1), the relative positions of the rotor and stator polar surfaces correspond to minimum rolftetancc, and from the symmetry
of flux distribution it is immediately obvious that there is, no
tangential pull on the rotor. -In JPig. 1 (a) the rotor pole is
22
shown displaced from the position of minimum reluctance in one
direction, and in Pig. 1 (c) in tjie opposite direction. If we bear
in mind that the dynamical stresses correspond to a tension along
the lines of force and a pressure at right angles to them, it is easy
to see that in Fig. 1 (a) there is a tangential force acting on the
pole from right to left, while in Pig. 1 (c) it acts from left to
right. If we now suppose that the stator polar surfaces travel
past the pole in a direction from left to right, then the successive
positions will be those shown in Pig. 1. Por every displacement
of the stator polar surface to one side of a rotor pole, there will
he an equal displacement to the other side, and the forces corresponding to equal displacements in opposite directions will be
equal and opposite. Thus the rotating field will exert an alternating torque on the rotor, and the positive and negative hlalfwaves of this torque will be. equal. The frequency of the torque
will be equal to twice the supply frequency multiplied by the
motor slip, and so long as the motor slips, the mean value of the
alternating torque due to varying magnetic reluctance wrill be
zero. The only effect of this torque is to throw the rotor into
forced vibrations, having a frequency equal to that of the torque.
Owing to the large moment of inertia of the rotor the vibrations
will be imperceptible for large values of the slip, i. e., during the
greater part of the acceleration period. When, however, the slip
has become sufficiently small and in consequence the frequency
of the torque sufficiently low, the amplitude of the rotor oscillations will become marked, and will increase with decreasing
slip.
Summing up, we see that the torque due to variable
magnetic reluctance is for all speeds below synchronism, an alternating torque consisting of equal positive and negative halfwaves, and hence having a zero mean algebraic value. It is
therefore quite inoperative so far as steady acceleration of the
rotor is concerned, and only produces equal periodic accelerations
and retardations i.e., it causes oscillations of the rotor. The
period of these oscillations is determined by the rotor slip, and
steadily increases with decreasing slip: .'. At the same time, the
amplitude of the oscillations increases.
The graph of the varying magnetic reluctance torque
expressed as a function of the speed is shown in Pig. 2 (a). J?o]
all speeds below synchronism, its mean value is zero, while a
synchronism.it is capable of assuming any positive or negativi
value between definite limits. Since the speed of synchronism i'
the only speed at which this torque may have a value differing fron
zero, we may conveniently refer to it as the synchronous torque.
The graph of this torque as a function of the speed is of
the well-known form shown in Fig. 2 (V?).
The method of varying* the torque-speed curve of an
induction motor by the introduction of resistance into the rotor is
also well known. The effect of introducing resistance is equivalent to a change in the slip scale, the maximum torque remain ing
unaffected in value, but occurring at a lower speed. Jf a very
powerful torque is necessary at starting, it is advisable io use a
high resistance squirrel-cage. On the other hand, with such a
squirrel-cage the speed to which the motor finally settles down
corresponds to a large slip, and this, as will be seen later on,
makes it more difficult to pull the rotor into synchronism. The
ideal arrangement would be one in which the squirrel-caue
resistance at starting is such as to give maximum torque, the resistance then automatically decreasing with increase of speed in
such a manner that at each speed maximum torque is m a i n t a i n e d
until finally the lowest possible resistance is reached, corresponding to a very small slip. Thetise of the skin effect in conductors
for automatically decreasing the rotor resistance w i t h increasing
speed has recently been proposed by Theo. Schou.*
4.
Torque dw> to currents induced iM field winding,
if this winding is cloned.
If the field winding be closed, the currents induced in
it will give rise to a torque, and a careful study of the nature of
this torque is essential to a clear understanding of tho occurrences
during the starting period. The armature of the machine may
again be regarded as forming the stator winding' of an induction
motor, of which the rotor winding i«.represented by the field coils.
There is, however, this very important difference between the
starting squirrel-cage and the field winding: tho currents induced in the squirrel-cage are capable, according to their distribution in space, of giving rise to a field whose magnetic axes may
occupy any positions whatsoever relatively to the centre lines of
the field poles; but the currents induced in the Held winding can
only produce a field whose magnetic fixes are coincident with the
• centre lines of the field poles. * This is conveniently expressed by
saying that the field winding is a " single-magnelic-a-xis " winding;
because it can only produce a field having a single definite set of
magnetic axes, namely, those corresponding to the centres lines of
the salient poles. Now a Motor having a polyphase stator, but a
*Lop. cit. In a more recent article CEhvtrical Wnrltl, May:*, IM9). ihe
saine writer £ escribes a compound aqmrrel-csige winding. ronsiHtin^ nf aa outer
squirrel-cage'of brass having a low reactance, and an inner wpilr:'<;l-iw#e of
copper nfc a greater depth and hencg having a higher reactance.
25
single-phase or single-magnetic-axis rotor, exhibits certain striking 1
peculiarities which differentiate it sharply from a-motor in which
both stator and rotor windings are polyphase. The earliest reference to this type of motor which the authors have been able to
find occurs in a paper by H. Gorges.* Since such motors are
not ordinarily used in practice, their characteristics do not seem
to be very generally known, and have only occasionally been
referred to. A complete analytical theory of this type of motor
has been given in a previous paper, t The torque-speed curve of
such a motor is shown in Fig. 2 (d)9 and its most striking characteristic is the torque reversal which occurs over a certain range
of speed in tho neighbourhood of half-synchronism. The analytical theory of this type of motor is somewhat complicated, but the
following general explanation based on a paper published in 189*
by P. KichlDergJ rnay be useful. The currents induced in the
single-phase rotor winding by the rotating field of the stator give
rise to a field which, relatively to the rotor core, is a simple alternating or oscillating field. By a well-known transformation this
oscillating field may be replaced by two equal and (relatively to
the rotor core) oppositely rotating fields, tho crest value of each
rotating field being half the maximum crest value of the oscillating field. Now if the slip of the motor be s and if its speed of
synchronism be denoted by n9 the frequency of the rotor currents
will ha sfy where f is the frequency of supply, and the npeed of its
component rotating fields relatively to the rotor core will be # n,
the speed of the rotor in space being (1— s) n. Regarding the
direction of rotation of the rotor as positive, the speed of one of the
rotating fields relatively to the rotor core is +$ n, while that of
the other is—$n. ITence the, speeds of the rotor rotating fields
in space are .v n +(! — $) n=n, and — su + (1—*) w=(l — 2 s) n.
The interaction between the stator field, and the lirst rotating
component of the rotor field, whose speed n in space is the same
as that of the stator field, gives rise to a torque in every respect
similar to that of an ordinary induction motor %"with polyphase
windings on both stator and rotor. The secoiM rotating component of the rotor field, whose speed in space is (1—2a) •;*, is
clearly incapable of reacting with the stator field in such a
manner as to give rise to a resultant torque ; for, owing to the
difference of speed, the relative position of the fields is constantly
changing, periodically passing through a succession of cycles
*H. Gorges ; Uener Drehstrommotoren mit vermin derter TonrenasnLl.
Elekti'oteclmische Zoitachrift, Vol. 17, p. 517 (1896).
"Mourn *1 of the indi'm Institute of Science, Vol. T, p. 205; also Transactions
of the An-ericari Institute of Electrical Engineers, Vol. 88, (1919).
JP. JRichberg; Zeitsolirift far Elektrotechnik (Wien), Vol. Ifi, p. 578 (180S).
27
expressed Some Engineers appear to hold the opinion that the
machine locks into exact half-synchronism. As we have seen,
the speed to which it settles down, although ij ear half -synchronism,
is^ not definite, and may, according to the special circumstances
of each case, be anywhere in the neighbourhood of that speed. It
is no more correct to say that the machine locks into half-synchronism, than it would be to say that, aa ordinary induction
motor locks into full synchronism.
5.
Torque, due to eddy current*.
If tho field structure is laminated throughout, the torque
duo io eddy currents will be insignificant. The case is otherwise,
however, with solid field poles in which large eddy-currents may
arise.
If wo were to imagine the rotor replaced by a solid cylinder
of eondiujtin^ material, thon the rotating Held of the stator would
ii'iv<5 ris(» to rotating eddy-cummt sheets in the conducting cylinder,
and tlte nxes of such, eummt sheets* would follow the axes of the
rotating stator field Ihere would in this case bo perfect freedom
of motion of the axes of the current sheets relatively to the rotor,
and this condition is closely approximated to in an ordinary
s<|uiiT<»l-cu#o winding. II: we next suppose that" the conducting
cylinder is cut up into a. number of Hectors by radial barriers of
i n s u l a t i n g material, then tho freedom of motion of the axes of the
current sheets relatively to the rotor would be largely destroyed,
and these axes could only swing through an angular distance not
pxoeedinir the niigtilar width, of a sector. Now this is approxiihn!t!ly tiir* eaKC corresponding to a salient pole rotor with solid
polos. In such a rot or, o\vinf»' to the restriction imposed on the
free development of eddy (uirrentn by the relatively larg'e spaces
between tho field poles, the axes of the eddy currents can only
travel through a relatively short distance. If the axes could not
Inivd at nil, tho arrangement would be identical with that of a
rotor having a single magnetic axis winding ; while if the axes
eonld travel with perfect freedom, it would be' identical with
t h a t of a Kqumvl-cage rotor. Ileneo wo see that the torqip due
to eddy currents in the solid field cores will partake partly of the
n a t u r e of the torque due to a single magnetic axis rotor winding,
and p a r i t y of that duo to an ordinary polyphase rotor. The* single
magnetic axis ciTect is, lunrover, in many cases found to predominate, a n d . considerable difficulty may then he experienced -in
ir<*tf iiii? the rotor to pass well beyond half-synchronous speed.
#Hy tho axc« f;f th<* current shoctn are meant the lines along which the
<:urivru HwiMty is y.pro or the lines with which Jill tho individual onrrrnt filnments
PULLING INTO SYNCHRONISM.
Of the various torques concerned in a<wlcrain^ Urn
rotor from rest to synchronism, three, namely, t h e i n d u c t i o n
motor, the single-magnetic axis, and the eddy eunvnt torque arc*
functions of the speed, and may hence, conveniently he n'tenrd
to as the speed torques. Let us suppose thai by Hie action ot tin*
•speed and hysteresis torques the rotor lias been bronirht t o n spft'd
not far removed from synchronism. Since in the i i r h r h l m t t r i i M ' d
of synchronism, the speed torques rapidly decrease w i t h <IiM'i«'nsing slip—as shown in Fig. :i—aftel assume zero values at synchronism, it is evident that tlie.se torques would never hi* abl«» to
bring the rotor up to full synchronism; and tin 4 hyslWHis t o r q u r i«
generally much too weak to el1'e«t this. Tim rotor is l i n a l l y pulli'd
into synchronism by the varying magnetic n>lud?meo t«»rqu*s anil
is maintained at synchronous «*peed by the same torque, al! t h e
other torques vanishing at. that speed. As already explained, t h e
varying magnetic reluctance torque may far t h i s MI^OII in* conveniently termed the synchronous torque, and we shall in what
follows refer to it as such.
'We have already seen that the synchronous torquo is an
alternating torque having a-zero mean value for all speeds other
than that of synchronism, and is thus incapable of <*x**rtii»er any
steady driving* or accelerating effect so lonaj as f l u * speed of the*
rotor is below synchronism. The frequency of the .synchronous
torque is given by %$f, and the forced oscillations of lite rotor to
xvhich the synchronous torque ^iven rise have flu* same frijqtiowy
•as the torque itself. Now. the rotor speed oscillations mil into
play a further alternating or oscillating torque, oivlr»t? to tin* fnH
that the speed torques change with the speed of tin* rotor. Hi*1
speed torques may for small values of the slip lit* t»k«'n to b«*
proportional to the slip, and hence their elian^s to In* proportional to the changes in the speed
The effect in t i n * wuw as if
we were to substitute for the fluctuating 8|>wl torques a rorstnnt
torque eqirU to the sum of the mean valuer of the ,Hpi*i*d torqws,
together with an oscillating torqiic* WIIOHI* amplitud« is proportional to that of the speed fluctuations.
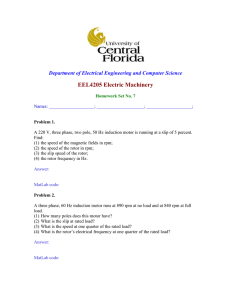
For the sake of simplicity we shall assume ill1*, speed
fluctuations to obey the simple harmonic law. They
then
be graphically represented in a vector diagram by th*» projVcliong
on the vertical axis of the vector 0V in Fig. 8, this vector rotatins? at 2 «/revolutions per second
The instantaneous projectir»n
of 0V gives the difference between the mstantanmis «pcwl and
the mean speed. Since the oscillating component of tho «}>HW]
30
with decreasing rotor slip. For, assuming the diagram to represent the conditions prevailing at a given mean, speed, if the
mean speed increases, OR must decrease; for if it were to remain
constant, then owing to the increase of its period, due to the
decrease of slip, its time-integral over a quarter-period would be
increased, and OV, which is proportional to this time-integral,
would increase. This again would cause OF (811), which is proportional to OV, to increase ; but since the length OS is constant,
an increase of Sit could only be brought about by a decrease of
OB (as shown by the clotted lines OS' and IV 8' in the figure).
It follows a fortiori that OR could not increase with increase of
mean speed.
We thus see that as the mean speed of the rotor gradually increases, the vector OV undergoes steady elongation, the
vector 01"=SR a similar steady elongation (01? is proportional to
OV) and the vector OR a steady contraction. The vector 08
remains fixed in magnitude, but gradually approaches OV. At
the same time the angular velocity of all the vectors in »thc
diagram steadily decreases. If we were to consider thd actual
paths traced out by the extremities of the vectors during the last
few cycles preceding synchronism, we should find that V traces
out a spiral path opening outwards, F a similar path, R a spiral
path contracting inwards, while 8 continues to move in its
original circular path. Just beibre synchronism is reached, OV
is moving with extreme slowness and OS is only very slightly in
advance of it. As OV, having passed through the horizontal
position, moves into the first" quadrant, its projection gradually
increases until the value of this projection, when ad clod to the
mean rotor speed, gives the speed of synchronism. At this instant
all the torqu^g have disappeared with the exception of tho synchronous torque.
It is clear that at the instant when synchronism is first
reached the synchronous torque cannot bo loss than the total
torque resisting the motion, ror, if such were the case, then
balance grjV the total driving and resisting torques must have
taken place at some instant preceding synchronism, and such
balance would have prevented any further increase of speed, •/. <?.,
it would have prevented the rotor from reaching synchronism.
Hence at the instant when synchronism is reached, the synchronous torque must either equal or exceed the total resisting torque,.
In the first case, the rotor will steadily maintain synchronous
speed. In the second, further acceleration will take' place, and
the rotor will settle clown to the steady speed of synchronism
fig* 3. Vector dkgram
31
only after & number of oscillations, the final position -which if,
takes up relatively to the stator poles "being s.nclitliat the synchronous torque arising from the displacement of tLc magnetic axes
of the stator and rotor is exactly eqrmlto the total resisting torque
Whethei the rotor comes up to synchronous speed quietly without oscillations, or whether such oscillations take place Iwfore it
•finally settles ([own to the steady speed of .synchronism^ the
Tunning' will correspond to stable conditions. .For hi oifher
case a momentary increase of speed results in decrease of driving
torque, and a momentary decrease of speed in increase of dri°vbt<;
torque. Tlie momentary changes in tlio driving torque \vhieli
arise during speed' fluctuations axe duo partly to changes in t h e
synchronous torque, which tend to cheek such lluckuitioiiH, and
partly to the reappearance of tlie speed and hysteresis tonfims,
which liaTe a similar effect.
OPEN wrMM CLOSED ]?JKLD WINDINOS AT STAILTING.
The advisability or otherwise of closing lho Hold windings at starting has been repeatedly discussed. The dmi£(M* of
breaking down the insulation by tho lii^h voltage iiuluoed in t h e
field windings when the stator circuits are Jh\st connected t o the
mains must bo taken into account. Although this danger IH
entirely avoided by short-circuiting the windings before ( h e
stator is connected to the mains, 'there is no <loul)t that, fmni f i l e
point of view of initial torque and rapidity of starting, it is i n advisable to have the field circuit closed
TJie effect of Hosing
tlio field windings is similar to that of reducing tin* resistance of
the squirrel-cage or eddy-current patlin—a procedure vvlildli in
vvrll-knawn to lower the initial torquo. ^gain, an tlie neighbourhood of half-synchronism is approached, tlio pOM f cirfiil Hinglo-nxin
rotor efTect may seriously affect the a^ccdmilion of the rotor, nnd
may frequently entirely prevent tlio machine from Htta-iniritf ittiy
tfpoed greatly exceeding that of liaif-syTichroniHrn.
In ordvr
tJicrofore to increase the* acceleration, of tlui roior d u r i n g l.lin
early stcift'Gs of tlie start im^; process, tlio fiokl slionUl bn k(»pi op<.m;
<'tn j risk if hreakmR down the insulation may bet guanlid airainst
I>7 the use of a suitable field break-up switchNow although, it is advisable to kwp tho ildd circuit
op.yri (lurinij tlio initial sta,i?^s of tlie starting' oponiiion, it by no
ineans follows that it would l)e equally advantageous to kftop it
open until the* machine lias l)oen. pulled into synchronism. Tin*
slip with which the rotor ultimately tends to run under the*
action of the speed torques will dcipend on the I'f^sistancn of Up*
circuits in which tlio currants n'ivin.^ Ti«<i to the H j x n c d torquw
circulate. By lowering this resistance the torque will bo momenta rily raised and the speed increased. Now closing f he Held
circuit would be equivalent to such reduction of iv.sistaueo, so t hut
the short-circuiting of the field during the final stages of t h e
starting operation will cause the mean rotor speed to approach
more closely to the speed of synchronism t h a n would otherwise
be the case. There is thus a distinct advantage in eloshiir the
field circuit during the final stages of the starting operation,
after the rotor speed has reached a value not diilVrin^ ^ivatly
from synchronism. Cases may in fact arise where a machine with
its field open might refuse to pull into synchronism, but could be
niade to do so by closing the field circuit. This conclusion lias
been verified experimentally. A certain rotary converter wan
started with its .field open, the slip-fing p. d. boiiu* HO low that; f ho
rotor settled down to a speed below synchronism, and reftmnl to
pull into synchronism
The moment, however, that t i n * licld
circuit was closed, the rotor locked into synchronism.
OaCILLA.TIONS IN STA.TOK C l - H U K N T D T K I N G THK P K R l o O
IMMEDIATELY Pit EC It, DING- H Y N C l I i t O N I S M .
Tt is well known that as the spec*cl of HyiK'hroniHin is
approached violent Illicit nat ions in the
eurmit trrad
become noticeable. Those are indicated in Fig. 5 of Rown
paper, and are easily accounted for. So lon£ as the* spend i«
synchronism.,, tlie field polos are slipping past tlie st.;itor polcn, and
periodic fluctuations are taking place in the n'luctnnw, fic»co!iipanied by corresponding fluctuations of reaetanc;* whitrh throw
the stater current into oscsillntions. Th'5 frequ Micy of Ihuse conciliations being 2 sf (since f h e reliietancv- r<.»turns to the same
instantaneous value after tlio polo has IIIOTCH! fbrotigli a d i s t a n r f *
equal to the pole-pitch, they are not noticeable at l<nv spmls and
only l)G(.5omc apparf^nt when the slip lias IH^COIHC sufficient Hinall.
i
(a]
'Hxi > KRTMKN T TA L R KStJLTS.
Relations connecting sfafor p. d. imth filttfar current,
stator input find potoer-fndor, rotor npe&l and
field e. m.f. when field is open-circuited
r
l'he experiments ombodied in t h e s<w»s of cnrvi^ j r i v c n
below were carried out on a 4-pole, 5 fc\v., ;l-phasc e o n v f » r t - » r designed for a continuous current voltt^o of 100—130 volts at a
speed of 750 r. p. in. This machine had laminated i m i n pol«s,
and was filted w i t h conmiutaiing polos, but had no special .starting
devices. \\'hile t h e ex peri men Is about to be described wcrp
400 &oq
700 €00
200 400
400 200
Fig. 4t. Curr©i ao3on©oti»g §p®tci wad field »- TO. i wifcfa
ia o
p, d*
83
carried out, the brushes were outirely removed from the commutator. Before each sot of readings the machine was allowed to
mn light for a sufficiently long time to get the hearings into a
steady state.
In the iirst set of experiments, the results of which are
exhibited graphically in Pigs. I. and 5, a number of gradually
increasing p d. s. wen* applied to the rotor slip rings, and after
the xpp<»d corresponding <o any given ]>• d. had settled down to a
constant value Holdings of the speed, current, power, etc., were
taken. Wlu>n the p, d. had been raised sufficiently to enable
the m a c h i n e to look into synchronism, it was still further
increased, and then a second series of readings corresponding to
dofTvasiiiif values of the p. d was obtained. In the figures both
tin* ascending and clc^eendinE 1 branches of the various curves are
Fiu', «li shown the relations connecting speed and field
e. in. f. w i t h sfator p. d. Below a p. d. of about 15 volts across
t h e slip rings t h e machine would not run at all. The speed then
gradually increased with the p. d., the increase becoming .much
slower beyond a certain point, and at a slip ring p* d. of about 4-5
volts tin* machine was able to lock into synchronism. During the
dosvfnding net of readings, »y nehronisnn was maintained down to
a v o l f r t t r * * of about 35 volts. Below-this point the speeds obtained
with givon voltages were found to be uniformly higher than those
rorroHpomling to the ascending branch of the curve. Since, as
Hhown by Fiu\ r», t h e power supplied to the machine was found to
be lower for deemifiing values of the p. d., in spite of the higher
value of t h e .speed, it in to ho inferred that for decreasing values
of t h « » p. d. t i n * resisting torque was uniformly less. This would
indicate' a deemine in the frictional resistances, probably due to
tin* t.rmjwraf ur<» of the bearings being higher during the descnndi f i i r set of r«»adings than during the ascending sot,
The changes in t h e field e. m. f. are related to those in
t h e spend. The field <». m. f. may be regarded as proportional to
tlm product of two factors namely, the maximum flux per polo
and t h e nlip. At first the field e. rn. f. rises with increase of p. d.,
indicating that the increase of f l u x is more important than the
d<*«Tf*asc» of slip. Beyond a certain point the decrease of slip is
more i m p o r t a n t than tin* increase of flux, and the field e. m.. f.
h<*i*ins to drm-aso. It doas not vaniwh at synchronism, indicating
t h a t tlK*re is either swaying or pulsation of the flux which enters
tin* main poles. Since for descending values of the p. d. the
sp«'."d is uniformly higher and hence the slip lower than for
lies, as already explained, wholly above the axis of sppfcl, all its
ordinates being positive; but the curve lias two m a x i m a separated
by a minimum.
It is the existence of this m h m m n n ; whirl»
causes the diKContinuiti.es in the speed curves.
S t a b i l i t y of
running can only be secured by working on a portion o f t h * *
torque-speed curve which has a downward slope From lefMo r i ^ h t .
With increasing p. d. and speed the point on t h < » (varyniirj
torque-speed curve corresponding to the stable r u n n i n g condition
for the given p. d. gets displaced further and further f » * th«* rkliU
until finally it reaches the minimum point on the <-urv«. A n
increase of p. d. beyond the value corresponding to
minimum
point results in a passage into the unstable ration w h i c h H<;s
between the minimum and the second minimum, and no s i a i i l f *
running is possible in this region. .It is only a f t e r Ihc* speed lias
passed beyond the second maximum of the ton{iie-Hpe«*«l *-urvi»
that stability can again be readied. The point where the discontinuity occurs along the ascending branch gives approximately
the speed corresponding to minimum torque ; w h i l e t h e discontinuity on the descending branch marks approximately t h e second
maximum of torque. The first maximum of torque would i-orn^pond roughly to the lowest speed at which the mnehiiu* w i l l run,
In .Fig. 8 are shown the relations eoiiiwetin^ npood i t n c i
p. d., and field current and p. d., with the field on (load short -circuit .
Bach curve is shown as having three branches. Two of thc«f»
correspond to the values obtained by first increasing tin* spped to
a certain value and then decreasing it. The third branch* innrkwl
"return from synchronism/' was obtained by first open-circuiting the field and raising the p. d. to a value Kuffieiont to wmhlo
the machine to lock into synchronism, then circuiting the field
and taking a set of readings while the p. d. was being decreased.
The first two branches of the speed curve are identical w i t h
those shown in Pig. 6. The relations connecting current and
power factor with p. d. are given by Fifr. 0.
R-eturning to Fig. 6, it will be s«en that the* machine^
starts with a lower p. d. when the field is short- wr<mit«d than
when it is on open eiruit ; and this mijjht at first night appear
to. contradict the statement previously mad^ retranlhig th«- advantage of starting with the field circuit open. Such, hovri'v^r, is
not the case ; for the real basis of comparison is not the p. d.
applied to the rotor, bat the current taken by it. The relation
connecting speed with current for the various arrangements triod
is shown in Fig. 10, and it will be seen at once that, the machine
starts up with a considerably lower current when the lidcl in
open-circuited. If the field is closed through a resistance, there