From: AAAI Technical Report SS-94-04. Compilation copyright © 1994, AAAI (www.aaai.org). All rights reserved.
ManufacturingControl System Principles supporting Error Recovery
Peter Loborg and Anders Tiirne
Dept. of Computer and Information Science,
Link0ping University,
S-58183 Link0ping, SWEDEN
E-mail:petlo@ida.liu.se,andto@ida.liu.se
January24, 1994
Abstact
This paper argues that manufacturingcontrol systems
shouldbe structuredto retain informationusedwhilespecifying the systemso it maybe reusedduringerror recovery
situations. Anexampleof such a system(the Aramissystem)andits proposederror recoverycapabilities is presented.
Introduction
MostManufacturingControl Systems0VICS)commercially
availablelack supportfor error recovery.Evennormalconstructs for encodingexceptionhandling,a natural part of
manycomputerlanguages,are absent. Althoughseveral
proposalshavebeensuggested,there are still shortcomings:
¯ althoughmanyproposalscontain supportfor error
recoveryor fault tolerant operation,mostof the support
only concernsthe assemblyplan/activities of the manufacturing process, suchas whatto do whena graspoperation falls (e.g. [Caoand Sanderson,1992;Delchambre
and Coupez,1988;Gaspartet. al., 1989]). However,
after a structural failure suchas a brokenair pressure
hose, andsubsequentrepair, parts of the machinerymay
be in an abnormal
state (i.e. not passedduringnormal
execution),or in a normalstate but not corresponding
to
the ’state’ of the programexecution- a situation seldom
addressed.
¯ they are often tediousto instruct, not to mentionthe
effort neededto modifythe system.Oneproblemis that
the knowledge
used wheninstructing a MCS
is to a large
extentlost at coding/compile
time- i.e. it is not explicitly needed/represented
in the systemsnormalinstruction formalism,andthus not availablefor further usage.
Asa result of this, manyearlier attemptsto providesupport for error recoveryoften result in multiplerepresentation of the knowledge
(e.g. [Leeet. al., 1983;Schmidt,
1992;Srinivas, 1977;Srinivas, 1978;TaylorandTaylor,
1988;Tayloret. al., 1990),implyingextra overhead
whenthe systemchangesand the knowledge
base is to
be updated.Aprimeexampleis the usageof an external
expert systemresponsiblefor detecting anomaliesand
for producingrecoveryactions, hookedon to an existing
101
controller. Asmallchangeof the programin the controller results in majorrewritingsof the expertsystem.
However,there are approacheswhereknowledgeis
reused(e.g. [Gini, 1983])or integratedas a part of the
instruction formalism([ChenandTrivedi, 1991;Delchambreand Coupez,1988;Gaspartet. al., 1989;Meijer
andHertzberger,1988;Meijeret. al., 1991]).
¯ the competence
of the user of these systems,i.e. the
operatorat the shopfloor, is seldomreused. Mostproposals presentedare designedto solve the problemautomatically,thus limitingtheir applicability.
Thearea of error recoverymaybe subdividedin detection,
diagnoseandrecovery.Weare primarilyinterested in providingsupportin the recoveryphase,or moreprecisely,
providingsupportto changethe state of the machine
to be a
legal one, andto synchronize
the state of the currentexecution with the state of the machine.Thegoal is to minimize
the time andmaterialloss duringthe recoveryprocess.
Themeansare twofold:Firstly, the usageof an explicitly
representedmodelof the underlyingsystem,providingrobust servicefor a task level instructionsystemas wellas a
semanticframework
for anyplanningor plan repair activity.
Secondly,
a task level wherethe activities, their causalrelation andwhatobjector typeof objectthey use are loggedin
order to extract informationabout the normalbehaviorof
the system.
Thenext section presents an overviewof Aramis(A Robot AndManufacturing
Instruction System),whichis
specification, programming
and executionenvironmentfor
manufacturing
applications. Thefollowingsection describes the recoverysupport(whichwill be1) providedby
the system.
Aramis - An Overview
TheAramissystemhas beendesignedwith a layered archi1. Theprogrammingenvironment
exists as describedherein,used
in a robotcell equipped
withvision,tactilesensorsetc. [Loborg
et.
aL, 1994;Loborg
et. aL, 1993;LoborgandT6me,1991;T6rne,
1990].Theerror recoverysupportaspresented
hereinis under
development,
andwill be presentedin a forthcoming
licentiate
thesis.
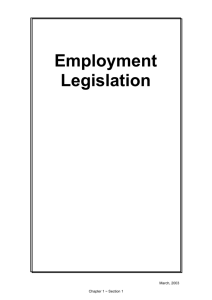
tecture, basedondifferentlevels of abstraction.It consists
of three different levels; task programming
level, the control level andthe physicallevel (Fig.I). It useswo
rld
model(WM)as interface betweenthe task level andthe
controllevel.
Atthe task level the operatorspecifies whatoperationsor
actions should be performeduponthe WM
and under what
conditions, usinga graphicalhybridrule basedlanguage
[Loborgand TOme,1991]. Thephysical environmentis
modelledas a set of objects in the WM,
whereeach object
has a set of state variables. Thetask programexecutesby
setting referencevaluesfor the objects(their state variables), therebyrequestingthe objectsto changetheir state.
Thecontrol level acts as a servomechanism
and is responsible for keepingthe real worldin a state representedin the
WM,
as the WM
reference values are changedby task programexecution.
Theprogramming
at the control level is typically doneby
control engineers,andconsists mainlyof specifyinghow
devicesin the real worldshould be viewedin the WM,
and
whatcontrol algorithmsis neededto implementthe servo
mechanism.
Thephysicallevel is the actual connectionto the real
world,whereexplicit I/O, requestedby control level algorithms, is performed
with sensorsand actuators.
speed= stop
speed = slow AND
direction = forward
speed = fast AND
direction = forward
..............
TaskProgramming
for coordinatingthe operationof all objects involved.
Eachobject contain an internal slate I andinformation
aboutits properusage.This will preventthe task level programmer
fromabusingthe object unnoticed- an exception
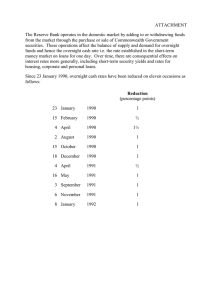
will occur. Thisprinciple is best explainedthroughthe followingexample,wherea two speedbidirectional electrical
engineis modelled
(fig 2). This deviceis representedin the
WM
by an object containing two state variables, named
speed and direction. The domainof speed is a set of
the three symbolsstop, low and high. The domainof
direction consists of forward and backward. This
results in an objectwithsix possiblestates. Weuse a set of
constraintsto groupthe state spaceinto a set of interesting
states (e.g. whenthe value of speedequals stop, the value of direction is uninteresting, andthus five states is
adequateto describe the engine).Afinite state machine
(FSM)
definedover the set of interestingstates is usedto describe howthese variable values maybe combinedand
changed
in this object. Toeachtransition definedin the
ARAMIS
Program)
Set . ~= ~ R e~ad, .
Figure 2 An electrical, bidirectional two speed engine is
modeledby two variables, direction and speed. Its behaviour
is modeled by a FSMwith five interesting states, each
representing a combinationof variable values according to its
constraint. The ares between the states describe legal
transitions, rouling out the posibility to reverse the engine
without requesting it to stop in between.
oo°,,o
<.v.
IOo.tro,
l-.. ......... 7
.:;........ ff7
..........................
~
indicatesinformation
flow) I R’lea~Wor~d
Figure 1 The world model is viewed as a set of reference
values whichis set by the Aramisprogramand used by a servo
controller (sensing/control) to invoke correct control
algorithms in the ’real world’. The WMalso support the
reading of actual values.
Theremainderof this section is devotedto the worldmodel
(howobjects are modelled,etc.), the controllevel andits
connection
to the real world,andfinally there is a brief
presentationof the task level language.
World model based programming
In Aramis,weadopt an object centeredviewof the world,
whereeachobjectis responsiblefor its owninternal state
andits consistency.Thetask level programis responsible
102
FSMthere mightbe an associated control algorithmresponsible for achievingsomething
in the real worldwhichcorrespondsto the transitionof states in the object. Thisfunctionality is part of the controllevel andwill be detailedin next
subsection.
Thetask level programcontrols the object by requesting
changesof its variable values. Theobject will respondupon
a requestwith oneof the following:
¯ error - there is nodirect path fromthe currentstate to
anystate representingthe requestedvalues,i.e. a state
wherethe requestedvalueswill satisfy the constraint
(task level programming
error).
Or:. there are severaldirect pathsto states corresponding
1. Weuse the wordstate to denote a specific combinationof values
for a fixed set of variables. Eachvariable take its values froma
finite (andthusdiscrete)domain.
to requestedvariable values(object modelling
error
should never occur)
¯ failed - the object did not succeedin reachingthe
requestedvariable values. This maybe dueto an engine
overloadsituation, somefault in the engineor the electrical hardwarefromthe I/O boardand onwards,or a
programming
error in the algorithmresponsiblefor
achievingthe state. Thisreply also indicatesthat any
built in recoveryactionshavefailed.
¯ succeed- the newstate is reachedand the worldhas a
state whichcorresponds
to the requestedstate.
Eachrequest fromthe task level programwill be suspended
until the objectreturns the result, in whichcasethe execution of the requesting’process’continuesas normalor an
exception/erroris raised.
This modelof an object is well suited for specifyingaspects of real time behaviour,suchas transition completion
timeI andalgorithmperiodicity. This is vital whendesigning controllers for anycontinuousphysicalprocess.
Control layer - implements objects
Thecontrol layer hardwareconsists of a set of computing
devicesandperipheral hardwareorganizedin a topologyof
communication
channels, whichshould provide real time
computationalpowerand I/O to the world model.
Although
this has not beena part of the project, the modeling of this topologyas wellas the analysisof computational needs(basedon the object models)and schedulingof the
actual computation
are topics that needto be addressedin
order to build a completesystem.Majorcontributionshave
already beenmadein the areas of real time communication
systemsandprotocols(e.g. [Thomesse
et. al., 1991]),scheduling algorithmsapplicable both to communication
and
processscheduling(e.g. [Leinbaughand Yamini,1982;Rajkumaret. al., 1988;Stancovicet. al., 1990;Fohler, 1992;
ShaandSathaye,1992])as well as distributionof time with
boundedaccuracy(e.g. [Kopetzand Ochsenreiter,1987;
Kopetz,1992]). Theproblemof allocating processornodes
for different sets of processesdepending
on both their computational and communicational
needandthe needfor processor specific services(suchas an I/O device)has also been
investigated(e.g. [Maet. aL, 1982;Verhoosel
et. al., 1991]).
Ourconcernhas beento find a suitable specificationfor
the computational
needsthat supportboth the schedulingalgorithmsandanalytical methodsused, andan abstraction/
interfaceto a task level language.
Theinterfaceconsistsof a set of objectsandtheir state
variables,anda principlefor howthe task level interacts
with objects. However,
if the sameabstractionof the physical worldas presentedby availablesensorsandactuators
I. Themaximal
amount
of timethe transitionwill useonceit is
actually
started.
103
wouldbe usedat the task level, the resulting state space
wouldbe enormousas wouldthe amountof communication
neededto keepthe worldmodelupdatedin a distributed system.
Thus,eachobjecttype is describedin twoparts. Firstly
an abstract modelof the objectis specified, as presentedin
previoussubsection.Secondly,the implementation
of it is
specified. This includesthe specificationof whattypes of
actuatorsandsensorsare used,whichalso implieswhatdata
types are usedat this level, codeto extract information
and
controlthe device,etc.
Thesetwo parts are then connectedby describinga mappingfromselected variablesor sensorsof the object to the
state variablesdescribingthe interface. Appropriate
parts of
the codedefinedin the objectare associatedwithtransitions
andnodesof the FSM
of the object - to be usedto accomplish a transition or maintaina reachedstate.
Example:
If the enginein Fig.2 is equippedwith a speedometerproducingvaluesas integers in the rangeof
0..3000,the cardinalityof the state spaceat the control
level is 3001x2. In the state spaceas viewedin the WM
(presentedin Fig.2) the variablespeedis reducedto range
over3 values,andthus the state spaceis reducedto a cardinality of 6. Thisstate spaceis thengrouped
into 5 interesting states, over whicha behaviouris definedin terms
of legal transitions, constitutinga FSM.Achangeof
valueof the speedometer
sensorat the controllevel is not
propagated
to the worldmodeluntil it impliesa changein
the correspondingWM-variable
of the object.
Formally,the state space as viewedby the sensors and
actuators available (SRT)is reducedor mapped
onto an exportedstate space(SE- the onepresentin or exportedto the
WM)
by a surjective functionf: SRT---~S
E. Thereforeall
low level states havea mapping.Thesamemappingalso denotes an inverse, injective functionfl : SE--OSRTimplying that state changingrequestsissuedat the task level have
a uniquecounterpartat the control level. Whether
the control algorithmsresponsiblefor achievinga state changein
SRTsuchthat fl(sF, request)equalsSRTresult, the resulting state, actuallywill do that or not is implementation
dependant.Whatis requiredis that]~SRTresult) equalssF, request. Theconstraints usedto specifythe mappingfromthe
exportedstate spaceto the set of interestingstates, also
called the abstractstate space,mustdenotea surjective
functionf’: SE"~S,,t, thus specifyingthe constraintsto be
non overlapping.
In this twolevel abstraction,the formerabstractionis
usedto decreasethe descriptionof the object to something
usefulat the tasklevel, andthe latter to definethe semantics
of the object andto providea base for error recovery.
Since the state of an object maynowbe abstractedto an
abstractstate for that object- a singlevariable- the state
spaceused in anyplanningeffort wouldnot increase exponentially withthe number
of state variablesusedto control
the system,only with the number
of objects it contains.
Task level programming- coordinating object
activities
Sincethis supportwill mainlydependon the object specification, it is expectedthat manytask level languagesthat
resemblesthe Aramislanguageas presented abovemayuse
a similar aproach.
Execution and error semantics
Thetask level languagehas the role of coordinatingobject
activities. Themostprimitivewayto do this is to requesta
single objectto changethe valueof oneor severalof its
WM
variables. This is a primitive action. A user defined
actionis a collectionof calls to primitiveand/orto user
definedactions, and a partial temporalorder (PTO)over
them.ThePTOconsists of a set of temporalrestrictions
overpairs of these action calls. Atemporalrestriction
betweentwoaction calls specifies that theymustexecutein
sequenceandwhichof themthat shouldexecutefirst.
When
executinga user definedaction, the default is to execute all its parts in parallel, exceptwhenthe PTOprohibits
this. Whether
parallel actions actuallywill be executedin
parallel or not, dependson resource management.
Thecontrol level maynot be powerfulenoughto executeall
requestedalgorithmsin parallel, or someobject maybe
occupiedbyother activities andthe requestedaction will
haveto wait.
Thepurposeof usingthis schemeis to promotethe encodingof whatorderingrestrictions of the applicationthat
really exists, andleaveto the systemto handlefurther restrictions imposedby resource management.
Aset of processes(called workers)repeatedlyactionsto
solvetheir tasks. Theseworkersare activatedanddeactivated by a humanoperator, acting as a foreman,decidingwhat
to performat the shopfloor.
Thedescriptionaboveis not complete.Thereexists constructs usedwithinan actionto definealternatives, andrecursiveactionsare usedto expressiterations. Thereare constructs to expressdata flowbetweenactions andtransformations of data throughthe use of functions.For a complete
description, se [TOme,1990; Loborgand TOme,
1991].
Error Recovery - exception handling and
planning
Examplesof commonplace
corrective actions in a manufacturingcontextare to replacewhatis faulty or free what
has accidentally got stuck. However,
this maynot always
be accomplishedautomatically, and humanintervention
mayleave the machinery
in anotherstate than a state appropriate for continuedexecution.
Thefollowingsectionswill briefly presentthe exception
handlingto be usedin a layeredsystemas describedabove,
and present someideas about howto supportthe user when
the state of the machineryno longercorrespondsto whatis
appropriateto continueexecution.
104
Basedon previoussections, the followingdefinitions are
straight forward:
¯ Thereferential closureof a task level process1 p (RCp)
is the set of all state variablesfromobjectswhichare
referencedby p. Theidea is to limit the worldto be concideredduringrecoverysituations. Theabstractreferential clousure(ARCp)
is the set of objects referenced
p.
¯ A processstate for a processp is a vectorof valuesfor
the variablesin the RCp.Anabstractprocessstate is a
vectorcontainingthe currentabstract state for each
object in the ARCp.
¯ Theprocess
state spaceis the set of all possiblestates of
a process,andis dividedin three subsets:
¯ Theillegal state spaceis the subset wheresomeof
the objectsare in an illegal state
¯ the abnormal
state spaceis the set of legal process
states not normallypassedduringexecution
¯ the normalstate spaceis the set of legal process
states passedduringsomeexecution
Analogous,
there is an abstract counterpart.
¯ Anexecutionpath for a process p denotes anysequence
of processstates forp that maybe passedduringsome
2. All possible executionpaths for p formsan
execution
executiongraphforp (F_X3p).A normalexecutionpath
(NEPp)
denotesthe trace of an executionof an errorfree
program,i.e. a programwhichsucceedsin accomplishing its task. Thesubset of the EGpthat is normallyused
is denoteda normalexecutiongraphfor p (NEGp).The
abstract versions (AEGp
and ANEGp)
are defined analogously.
¯ An error occurs whenan executiondeviates fromthe
EGpandthere is no exceptionhandlerthat succeedsin
redirect the executionbackinto the EGp.Theerror will
manifestitself in anyof the followingthree alternatives:
¯ the executionenters the illegal state space
¯ the executionhalts prematurely
¯ explicit monitoring
of the processstate detects the
deviation
This definition is basedon the assumption
that the model
of the worldis correct, but not complete(thus the second
1. Actually,
onlya toplevel process,a worker.
Although
action
calls insidethe worker
are performed
in parallelandthusconstitutesprocesses,
theyare regarded
as actioncalls - notprocesses.
2. Withthe term’someexecution’wedonot includeexecution
of
exception
handlers!
point above).
¯ An exception occurs whenan executiondeviates from
the EGpbut is redirectedinto the EGp(withoutentering
the illegal state space)by someexceptionhandler.
Asa result of this definition, problems
duringthe assembly
processcausedby damaged
parts or parts slightly out of
specificationare not regardedas errors if there exists a procedureto recoverfromthese situations.
Generally,recoveringfroman error correspondsto
changingthe state of the machinery
so it will correspond
to
anyprocessstate in the EG.It is preferableto recoverto a
processstate in EO’close’to the currentprocessstate - providedit is possibleto associatea cost functionto the transitions of objects. Usingthis approach,the followingissues
must be concidered:
¯ decidingwhethera processstate is in the F_X3
or not is
nontrivial, compared
with decidingwhetherthe state is
inside a NEG
- a matterof comparing
with the execution
log.
¯ simplychangingthe state of the machinerywill most
likely conflict with physicalor other restrictions on how
to operate the machinery.Theinformationabout such
restrictions is encodedin the task level program,explicitly or implicitly. Thatinformationmustbe extractedto
guide the planningof howto changethe state of the
machinery.
Thefollowingsubsectionswill present suggestionson how
to implement
exceptionhandlinganda restricted version of
recoveryfromerrors, basedon the definitions anddiscussion above.
Exceptionhandling in the control level
Exceptionhandling at the task level
Providingexceptionhandlingat the task level maybe
viewedas simplyprovidingsomesyntactic construct to
catch a signal andtransfer control to somepredefinedpiece
of code. Examplesof such exceptionhandlingconstructs
can be foundin several different programming
languages.
Mostof themhave in common
that they describe howto
handleexceptionsin a sequentialset of instructions- not
parallel activities nor higherlevel instructions/activities.
In the data base community,the notion of SAGAS
or
nested SAGAS
[Garcia-Molinaand Salem, 1987; GarciaMolinaet. al., 1991] has beendevelopedandproposedfor
modelling
parallel, nestedactivities in a corporation,suchas
receivingorders, billing the customerwhileupdatingthe inventory,andso on. In principle,it is a scheme
for specifying
compensating
activities to be usedin case of an abortionof
an ongoingactivity. It also specifieshowthe abortionof one
activitythat is a part of a nestedstructureof activitiesshould
affect the other activities. Thereare no meansto describe
that an alternative activity shouldbe performed
whenan activity aborts.
In a moregeneralsetting, as describedin previoussections, it mightalso be valuableto be able to specifyadditional and/oralternativeactionsto use, as wellas howto return to normalexecution.Thelatter is uncommon
in normal
programming
languagessuch as ADA,wherethe exception
handler’takes over’ the remainingexecutionin the module
that experiencedthe error. If the exceptionhandlersucceeds,the modulewill return as normal,otherwiseit will
propagatethe sameor a modifiederror to its caller.
Error Recoveryat the task level
Fromthe task level point of view,it is preferableif the control level couldbehavein a transactionalway,i.e. either
accomplishrequestedstate changesor report a failure without changinganything.This is not alwayspossible - a half
doneseamweldmaynot easily be undone- but should be
desired whenever
possible.
Astraight forwardapproachis to label transitions of an
object as undoableand/orrestartable, either by specifying
other algorithmsto use in orderto achievethat, or by specifyingthe objectto use anotherexistenttransition andits algorithmas undoor recovertransition. This is analogousto
the notion of ’compensating
actions’ andhas beenproposed
in manufacturing
applications by, e.g. [Schmidt,1992].A
further functionalityis to specifythe transitionas interruptable, i.e. specifyingthat the task level is to executesome
preparedbut exceptionaltask beforereturningthe control
backto the controllevel.
Thedefinition of objectsas proposedherein is easily
adaptedto sucha solution, but experiments
with different
applicationsis neededto evaluatethis approach.
105
Whenthe exceptionhandlingfails, the error is propagated
up to the user, the human
operator. Heor she has to understandthe originalfault andcorrect it in orderto continue
execution.In order to correct the fault, it is not uncommon
that the state of the machinery
is changedmerelyin order
to access the failing device, nor is it uncommon
to remove
someof the workpiecesdueto a defect - either causingthe
problem
or a result of it. Theeffect of this activityis, that
the machinery
is not alwaysin the samestate as it was
wheninterrupted. Asspecifiedpreviously,the processstate
after the failed action maynowbe either illegal, abnormal
or normal.
Usingthe currentdefinitionof an objectthere is no support for howto changean illegal processstate into a legal
one, i.e. the systemcan not proposehowto doit. It can
merelypresentthe fact andinformthe user aboutthe expectedstate.
If the processstate is abnormal,
it indicatesthat noexecution passedthis state yet. Thusthe state mustbe changed
to be a normalonein orderto be certainthat it is possibleto
continueexecution.If this normalstate doesnot correspond
to the onewherethe fault occurred,it is likely that continued
execution
will fail. Thereasonis that the internalstate of the
controllingcomputer
is not correct with respectto continued
executionfromthis new,normalstate.
Theexecutionlog - a sourceoflnformation
It is a basic
assumptionin this presentationthat the informationneeded
to performrecoveryplanningis either explicitly availableor
maybe extracted by observingthe systemexecutingunder
normalconditions.This section will discussthe secondpart
of that assumption.
Thereferential closureof a processp (RCp)is an interesting notionsince mostproblemstend to be local to the processk Astraight forwardmethodto identify a RCpused in an
applicationis to log the activities of processp. TheRCpmay
also be analyzedfromthe sourcecodefor p.
As stated previously, the normalexecutiongraph(NEG)
is usefulfor decidingwhethera legal processstate is normal
or abnormal,i.e. if there exists a programwhichcan be used
to continueexecutionfromthat processstate. Byloggingthe
process state the NEG
(and the ANEG)
is obtained. Since
loggingisprocesslocal,the log will start to repeatitself, i.e.
as processescontinueto executecyclically, the log of each
processwill containrepeatingseries of log records. When
that happens,newlog records will no longerbe appendedto
the log. Theexisting log will be reused, expanded
with
branchesif the path starts to deviatefromthe previously
knowncycle. Extra care mustbe taken whenhandlingvariables referring to materialin flow,since they maypoint to
differentobjectinstancesat differentpointsin time.
Apartfromloggingthe state of the system,the state of the
controller mustbe loggedin order to supportresynchronization of programexecutionwith a state of the machinery.
Theresult of this loggingschemeis a knowledge
base
with informationaboutthe normalbehaviourof the application, i.e. knowledge
aboutdata andcontrol flow. Thusimplicit knowledge
is extractedandmadeexplicitly available
for reuse.
Planningfor error recoveryPlanningis neededin order
to supportthe user in situations whenthe machinery
is in an
abnormal
state. Ratherthan creating a plan fromthe current
(abnormal)state to the last known
normalstate, wesuggests
that a plan shouldbe generatedto the closest normalstate.
Normal
executionis then restarted fromthat newstate, using the loggedcontroller informationto synchronizethe
controllerwiththe state.
Theexpectedadvantageof usingthis approach,is that it
will excludethe needto plan for a repetitive sequence
of actions - thus reducingplanningcomplexity.Themotivationis
postponed
to the endof this subsection.
1. Thecasewhen
processsynchronization
is a part of the problem
is postponed
as futurework.
106
Thecost functionimpliedby the termclosest usedabove
is definedas follows:
¯ for eachobjectthere is a cost associatedwith eachtransition between
abstract states of that object
¯ givena currentabstract state for an object, the distance
twostates in that objectis definedas the minimal
sumof
transition costs between
the states. Sincetransitions
havea direction, the distance betweenstate AandB of
an object maydiffer fromthe distance betweenB andA.
Thedistanceis infinite if there is no sequence
of transitions fromAto B.
¯ the distance betweentwoabstract processstates is the
sumof the distancefor the components,
i.e. the individual objects.
Usingthis definition the distancebetweento processstates
is defined,usingthe abstractstate space,as the shortestdistance betweenthe corresponding
abstract processstates.
Producinga planto reachthe selected goal state amounts
to selectingthe orderin whichthe differenttransitionsfrom
the participating objectsshouldbe executed.If no ordering
couldbe found,there are physicalrestrictions in the machinery that prohibitsthe currentsolution.In sucha casethe next
2.
cheapestgoalstate is selectedandthe processrestarts
When
the orderingis found,the plan is refined fromthe abstract state spaceto the full state spaceas represented
in the
worldmodel.Thisrefinement
is safe, i.e. it will not invalidate the plan achievedat the abstract level.
Normally,decidingwhenit is safe to use a planningoperator impliesverifyingpre- andprevail-conditions
for that
operator.In this approach,eachtransition can be viewedas
an operator. Byanalyzingthe log, pre- andpost-conditions
as well as a pessimisticversionof the prevail conditioncan
be extractedfor eachtransition. Sincethe planningis performedin the abstract state space,these conditionswill express the currentabstract states of other objectsin the RCp,
or a "don’t-care"value.
This approachdoesnot permitanyobject to re-enter a
state it hasalreadyvisited.Thisrestrictionis natural- if the
applicationimpliesa partly repetitive behaviour,
i.e. that an
objectcyclicallyreturnsto the samestate, there will alsoexist programsused duringnormalexecutionto accomplish
this behaviour.Thusthese programsmaybe used from
whateverstate in the loop the plannerchooseas goalstate.
In [Klein, 1993;B~lckstrOm,
1992;Backstrt3m
andKlein,
1991]a planingformalismcalled simplified action struc÷) is presenttures (SAS)andan extendedversionof it (SAS
ed. Usingthis formalism,somerestricted planningproblemsis shown
to be tractable, i.e. solvablein polynomial
time. Theapproachpresentedherein is close to but doesnot
fully correspond
to these restricted classes. Themainadvan2. In orderto includeaaalternative,moreexpensive
set of traasifionsleadingto the same
goalstate, the definitionof distancemust
be rephrased.
rage with this approachis that the actual planningproblems
as posedby a real applicationis expectedto be limited, both
in termsof the state space (dependingon howprocessesare
structured) andin the length of producedplans.
Resynehronizatlon A seldom addressed problem when
dealing with an error recoverysituation in the automation
context is, that evenif the humanoperator is capableof
manuallymodifying
the state of the machineryto be a legal
one, it is almostimpossibleto continueexecutionfromthat
state. The reason is that it is non trivial to change the interhal state of the controller to correspond to the new state of
the machinery. However, if there is a well defined separation between different processes in a controller, and if interprocess communication is formalized, it is possible to
support the change of the internal state for one such process.
As described above, logging of a process implies saving
the values for the state of the process (all variables in the
RCp) as well as information about the current activation
records used by the process (the internal state), i.e. both data
and control information. Using this information, it is
straight forward to modify the internal state I to be in accordmacewith any state present in the log; Find the entry in the
log corresponding to the state, and replace the process internal control information by the one found in that entry.
[Delchambre and Coupez, 1988] A. Delchambre and D. Coupez.
Knowledgebased error recovery in robotized assembly In
Proceedings of the 9th International
Conference on
Developments in Assembly Automation - Japan vs Europe;
Product Design for Assembly; Assembly Automation. p.349-66.
IFS Publications, Kempston,Bedford, UK, 1988
[Fohler, 1992] G. Fohler. Realizing Changes of Operational
Modes with Pre Run-Time Scheduled Hard Real-Trine
Systems. In Proceedingsof the Second International Workshop
on Responsive Computer Systems, Saitama, Japan, October
1992.
[Gaspart et. aL, 1989] P. Gaspart and A. Delchambre and A.
Coupezand P. Brouillard. Rule based procedures for diagnosis
and error recovery. In Proceedings of MIV-89- International
Workshopon Industrial Applications of MachineIntelligence
and ~r~sion (Seiken Symposium).p.88-93, 1989
[Gini, 1983] M. Gini. Recovering from Failures.
A New
Chalengefor Industrial Robotics. In Proceedingsof the 25’th
IEEE Computer Society
International
Conference
(COMPCON-83).
p.220-227, Arlington 1983
[Garcia-Molina and Salem, 1987] H. Garcia-Molina, K. Salem.
SAGAS.Proc. SIGMOD
int. conf. on Management of Data,
pp.249-259, May 1987
[Garcia-Molina et. aL, 1991] H. Garcia-Molina, D. Gawlick, J.
Klein, K. Kleissner and K. Salem. Coordinating MultiTransaction Activities. Data Engineering Bulletine 1991 (also
in COMPCOM91)
[Klein, 1993] I. Klein. Automatic Synthesis fo Sequential
Control Schemes. PhD-theses no.305, Link6ping University,
1993
Conclusion
In this paper,a proposalis presented
of howto structurea
manufacturing
controlsystemin orderto achievean open,
flexible andmodular
systemwhichis capableof reusing
the knowledge
encodedfor executionto providesupport
for errorrecovery.Theknowledge
is of the sametypeas
frequentlyusedin proposalsfor detection/monitoring
and
diagnose,thusenablingits reusefor thosepurposes
as well.
[Kopetz, 1992] H. Kopetz. Sparse Time versus Dense Time in
Distributed Reai-TimeSystems. Proc. 12th Int. Conference on
Distributed ComputingSystems, Japan, June 1992
[Kopetz and Ochsenreiter, 1987] H. Kopetz, W. Ochsenreiter.
Clocksynchronization in Distributed Real-I~me Systems, IEEE
Transactions on Computers,Vol C36, No. 8, pp. 933-940, Aug.
1987
[Lee et. al., 1983] M.H. Le, and D.P.Barnes and N.W. Hardy.
Knowledge Based Error Recovery in Industrial Robots. In
Proceedingsof the International Joint Conferenceon Artificial
Intelligence. pp.824-826, 1983
References
[B~ckstr6m, 1992] C. B~ckstr6m. Computational Complexity of
Reasoning about Plans. PhD-thesis no.281, Link6ping
University, 1992
[Leinbaugh and yamini, 1982] D.W. Leinbaugh and M. Yamlni.
Guaranteed response tinae in a distributed hard real-time
environment, Proc. Real-time systems symposium,Dec. 1982.
[B.~ckstr6mand Klein, 1991] C. B/ickstr6m, I. Klein. Planning in
polynomial time, the SAS-PUBSclass. Computational
Intelligence, 7:181-197, August1991.
[L,oborg et. al., 1994] E Loborg, P. Holmbom,M. Sk61d and A.
T6me.A Model for the Execution of Task Specifikations for
Intelligent and Flexible Manufacturing Systems, accepted for
publication in Integrated Computer-AidedEngineering (special
issue about AI in Manufactoring and Robotics to appear
somewhereduring 94).
[Chert and Trivedi, 1991] C.-X. Chert and M.M.Trivedi. A task
planner for sensor-based inspection and manipulation robots.
In Proceedings of the SPIE - The International Society for
Optical Engineering, vol. 1571, p. 591-603, 1991
[Cat and Sanderson, 1992] T. Cat and A.C. Sanderson. Sensorbased Error Recovery for Robotic Task Sequences Using Fuzzy
Petri Nets. In Proceedingsof lEEEInternational Conferenceon
Robotics and Automation, p. 1063-9, 1992
[Loborg et. ai., 1993] P. Loborg, T. Risch, M. Sk61d and A.
T6rne. Active tO Databases in Control Applications, in
Microproeessing and Microprogramming, Vol. 38, No 1-5,
p.255-264, proceedings of the 19th Euromicro Conference,
Barcelona, sept 1993.
1. Providedthat the executing systemis well defined, using modifiable data structures to hold such information. If the executing
code is compiledto machinecode, this maynot be the case.
107
[Loborg and T0me, 1991] P. Lobor8 and A. T6me. A Hybrid
Language for the Control of Multimachine Environments, in
Proceedings of EIA/AIE-91,Hawaii, June 1991.
[Maet. al., 1988] P.R. Ma, E. Y. S. Lee and M. Tsuchiya. A Task
Allocation Model for Distributed Computing Systems, Hard
ReallimeSystems,
Eds.SytankovichlRamamritham,
pg.249255,IEEEComp.Soc.Press,
1988.
[Meijerand Hertzberger,
1988]G. R. Meijerand L. O.
Hertzberger.
Off-Line
Programming
of Exception
Handling
Strategies.
In Proceedings
of IFAC Symposium
on Robot
Control.
p.431-436,
Karlsruhe
1988
[Meijer
et.al.,1991]G.R.Meijer
andL.O.Hertzberger
andT.
L. MaiandE. Ganssens
andF. Arlabosse.
Exception
Handling
SystemforAutonomous
RobotsBasedon PES.In Journal
of
Robotics
andAutonomous
Systems.
p. 197-209,
no.7,1991
[Rajkumar
et.al.,1988]R. Rajkumar,
L. Sha,J.P. Lehoczky,
Real-Time
Synchronization
protocols
formulti-processors.
Proc.IEEEReal-~me
systems
syrup.,
CS Press,
LosAlamitos,
Calif.,
pp.259-269,
1988
[Schmidt,
1992]U. Schmidt.
A Framework
for Automated
Error
Recovery
in FMS.In Proceedings
of the2’ndInternational
Conference on Automation, Robotics and Computer Vision.
p.IA.3.4.1-5, 1992
[Sha and Sathaye, 1992] L. Sha and S. Sathaye. Distributed
Real-Time System Design using Generalized Rate Monotonic
theory, Second Int. Conf. on Automation, Robotics and
Computer Vission, SINGAPORE,
1992
[Srinivas, 1977] S. Srinivas. Error Recovery in Robot Systems
PhDthesis California Inst. of Tech., Pasadena,1977
[Srinivas, 1978] S. Srinivas. Error Recovery in Robots Through
Failure ReasoningAnalysis. In Proceedingsof AFIP. National
ComputerConference, p.275-282, 1978
[Stankovic et. al., 1990] J.A. Stankovic, K. Ramamritham,and
P.-E Shiah. Efficient Scheduling Algorithms for Reai-Ttme
Muitiprocessor Systems. IEEE Transactions on Parallel and
Distributed Systems, pages 184-194, April 1990
[Taylor and Taylor, 1988] G. E. Taylor and P. M. Taylor.
Dynamicerror probability vectors: a framework for sensory
decision making. In Proceedings of the 1988 IEEE
International Conferenceon Robotics and Automation, p. 1096100 vol.2, 1988
[Taylor et. al., 1990] P. M. Taylor and I. Halleron and X. K.
Song. The application of a dynamicerror frameworkto
robotic assembly. IEEEInternational Conference on Robotics
and Automation, pp170-5. IEEE Comput. Soc. Press, Los
Alamitos, CA, USA 1990.
[Thomesseet. al., 1991] J.-P. Thomesse,P. Lorenz, J. P. Bardinet
and T.Valentin, Factory Instrumentation Protocol: Model,
Products and Tools, Control Engineering, pp65-67, Sept 1991.
[T6rne, 1990] A. T6me. The Instruction and Control of MultiMachine Environments, in Applications of Artificial
Intelligence in EngineeringV, vol. 2, pp. 137-152,prec. of the
5th Int. Conf. in Boston July 90, Springer-Verlag,1990.
[Verhoosel et. al., 1991] J. P. C. Verlaoosel, E. J. Luit, D. K.
Hammer, E. Jansen. A Static Scheduling Alghorithm for
Distributed Reai-TimeSystems, Journal of Real-?ime Systems,
3, pp.227-246, KluwerAcad. Pub. 1991.
108