Genetic Approach for Optimizing Ensembles of Classifiers
advertisement

Proceedings of the Twenty-First International FLAIRS Conference (2008)
Genetic Approach for Optimizing Ensembles of Classifiers
Fco. Javier Ordóñez and Agapito Ledezma and Araceli Sanchis
Universidad Carlos III de Madrid
Avda. de la Universidad, 30, 28911
Leganés (Madrid). Spain
Abstract
Pollack 1991). Once the classifiers have been generated,
they are combined, in most cases by voting or weighted voting.
One example of methods that use different learning algorithms in order to generate a heterogeneous ensemble of
classifiers is Stacking (Wolpert 1992). Stacking uses an algorithm to learn how to combine the outputs of a set of classifiers that have been obtained by different learning algorithms
(meta-classifier).
One of the problems of Stacking is how to obtain the
right combination of base-level classifiers and the metaclassifier, specially in relation to each specific dataset. In
a previous work (Ledezma et al. 2004), we presented an approach which used Genetic Algorithms (GA) to search for
good domain-specific Stacking configurations. GA-Stacking
found several Stacking configurations that performed very
well given a specific domain, but the time it needed to find
a solution grew exponentially depending on the characteristics of the domain. The approach presented in this paper
is inspired on GA-Stacking, continuing that line of thought,
but not limited to find Stacking configurations. Some somewhat related approaches have used recently GA’s in order to
determine optimal ensembles of classifiers in different contexts (Altinçay 2004; de Oliveira et al. 2005). In this work
we let the genetic algorithm to find a good set of base level
classifiers and which method is more suitable to combine
them, either using a metaclassifier or combining the base
level classifiers by voting. Furthermore, we have extended
the previous GA-Stacking approach by using a set of classifiers trained a priori in order to improve the efficiency of the
genetic algorithm. Finally we have compared results with
two recent ensembles methods based on Stacking.
This paper is organized as follows. Section “Stacking
and GA-Stacking” gives some background on Stacking and
show our previous work based on genetic algorithms, GAStacking. Section “GA-Ensemble” introduces our genetic
approach, GA-Ensemble. Sections “Experimental setup”
and “Empirical results” describe the experimental setup and
the results, respectively. The last section, “Conclusions and
future works”, draws some conclusions.
An ensemble of classifiers is a set of classifiers whose predictions are combined in some way to classify new instances.
Early research has shown that, in general, an ensemble of
classifiers is more accurate than any of the single classifiers
in the ensemble. Usually the gains obtained by combining
different classifiers are more affected by the chosen classifiers than by the used combination. It is common in the research on this topic to select by hand the right combination of
classifiers and the method to combine them, but the approach
presented in this work uses genetic algorithms for selecting
the classifiers and the combination method to use. Our approach, GA-Ensemble, is inspired by a previous work, called
GA-Stacking. GA-Stacking is a method that uses genetic algorithms to find domain-specific Stacking configurations. The
main goal of this work is to improve the efficiency of GAStacking and to compare GA-Ensemble with current ensemble
building techniques. Preliminary results have show that the
approach finds ensembles of classifiers whose performance
is as good as the best techniques, without having to set up
manually the classifiers and the ensemble method.
Introduction
In recent years there has been a growing interest in a particular area of Machine Learning: the combination of classifiers (Dietterich 1997). This approach is known as ensembles of classifiers in the supervised learning area, and the
main idea behind is that ensembles are often much more
accurate than the individual classifiers that make them up.
Usually the members of the ensemble are generated by applying a single learning algorithm (Dietterich 2000) (homogeneous classifiers). On the other hand, there are other research in the area that use different learning algorithms over
a dataset to generate the members of the ensemble (Wolpert
1992) (heterogeneous classifiers).
In order to generate a homogeneous ensemble of classifiers there are several methods that can be grouped in:
sub-sampling the training examples (e.g. bagging (Breiman
1996) and boosting (Freund & Schapire 1995)); manipulating the input features (Cherkauer 1996); manipulating the
output target (e.g. ECOC (Dietterich & Bakiri 1995)); and
injecting randomness in the learning algorithm (Kolen &
Stacking and GA-Stacking
Stacking is the abbreviation to refer to Stacked Generalization (Wolpert 1992). The main idea behind Stacking is
c 2008, Association for the Advancement of Artificial
Copyright Intelligence (www.aaai.org). All rights reserved.
89
GA-Ensemble
to combine classifiers from different learners such as decision trees, instance-based, bayesian or rule-based learners.
Stacked Generalization works by deducing the biases of the
generalizer(s) with respect to a provided learning set. Each
classifier uses different knowledge representation and different learning biases, so the hypothesis space will be explored
differently, and different classifiers will be obtained. It is
expected that their errors will not be correlated, and that the
combination of classifiers will perform better than the base
classifiers.
Once the classifiers have been generated, they must be
combined. Stacking uses the concept of meta learner.
The meta learner (also known as level-1 model or metaclassifier) tries to learn how the decisions of the base classifiers (or level-0 models) should be combined to obtain the
final classification. To classify a new instance, the level-0
models produce a vector of predictions that is the input to
the level- 1 model, which in turn predicts the class.
One problem of Stacking is how to obtain the right combination of classifiers, especially in relation to each specific
dataset. If the number of classifiers and algorithms to use is
small, the problem can be solved by a simple method: exhaustive search. But when it becomes unfeasible to use exhaustive search, it is very difficult to find the best classifiers
combination. The work presented in this paper is based on
a previous approach called GA-Stacking, which used a genetic algorithm to find Stacking configurations for a specific
domain.
Most work on Stacking focuses in the selection of the
meta-level data and algorithm to generate the base-level
classifiers (Seewald 2002; Dzeroski & Zenko 2004). In the
GA-Stacking approach a genetic algorithm was used to generate the whole Stacking system configuration (level-0 and
level-1 classifiers) to perform reasonably well in a specific
domain. In other words, each individual in the population of
the GA, represented a different Stacking system configuration.
In a preliminary GA-Stacking work (Ledezma, Aler, &
Borrajo 2001), the search carried out by the genetic algorithm was limited to find a Stacking configuration with four
base-level classifiers and the meta-classifier from a set of
six available algorithms. However, in the last approach the
search space was extended enlarging the number of possible
base-level classifiers to ten and including the learning parameters of the algorithms in the search. This implies a very
different and much richer search space.
Results showed that GA-Stacking was comparable to the
best results reported so far, and it was never significantly
worse than the other systems tested. The main advantage
of GA-Stacking was its flexibility and extensibility, since it
could use new learning algorithms as soon as they were created, not being restricted by a priori assumptions. It was
unnecessary to specify in advance parameters such as the
number of base classifiers or the algorithms available to be
used. On the other hand, GA-Stacking required a longer execution time than the other approaches, because several generations of individuals had to be evaluated to obtain a good
solution.
In this section we will describe the approach taken by GAEnsemble to build the ensembles of classifiers. As we detail in a previous section, GA-Stacking focuses in generating optimized Stacking systems, and although good results
were reported, a very long execution time was required. The
question is: how to improve the efficiency without losing accuracy?. GA-Ensemble tries to determine, in a reasonable
time, which classifiers and which method to combine them
is the best option for a specific domain. To solve this issue,
in this work the genetic algorithm makes use of a pool of
trained classifiers (Zhou et al. 2001); that is, all the algorithms needed by the genetic algorithm are trained a priori
to avoid training them in successive generations of the genetic algorithm. Before the search starts, and considering
we have used cross-validation process to prevent overfitting,
the training folds of the data set are identified and the set
of algorithms available to be used in the search is trained
a priori to generate the classifiers. Making unnecessary to
regenerate the classifiers in every iteration of the genetic algorithm (as was the case in GA-Stacking).
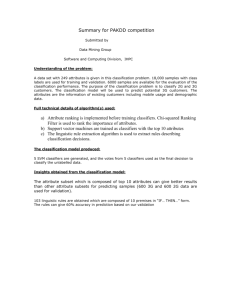
GA-Ensemble has three phases (see Figure 1): classifiers
generation, problem encoding and the genetic search. Next,
we will detail each one of these phases.
Classifiers generation
The first step of GA-Ensemble is to take the domain data
and the available learning algorithms as input to generate the
pool of classifiers, training the learning algorithms. Once a
classifier is included in the pool its learning algorithm will
not need to be trained any more along the genetic algorithm
execution.
Problem encoding
The solutions encoding task is performed in the second
phase. There are different ways to represent the solutions
of a problem for a genetic algorithm (e.g. binary codification, decimal, hexadecimal, etc). In order to represent
the candidate solutions or individuals in GA-Ensemble, it
has been decided to use a binary representation since it allows the use of canonical GA’s. The canonical GA is the
original form proposed by Holland (Holland 1975; 1992)
and has a stronger mathematical foundation (Goldberg 1989;
Mitchell 1996).
In the GA-Ensemble approach, each individual in the population of the genetic algorithm represents a different ensemble. The size of the chromosome, that represents an individual, is given by the number of available classifiers in the pool
and an extra gene than indicates the method that is going to
be used to combine the classifiers (see Figure 2). For example in this work, in which we have used fifteen classifiers,
each individual is sixteen genes long.
When GA-Ensemble makes use of a metaclassifier to
combine the base-level classifiers, a multi-response model
tree (Frank et al. 1998) is always used, so the meta-level
algorithm is never included in the search space.
90
Figure 1: General framework of GA-Ensemble.
fication accuracy of the ensemble encoded in the individual
over a defined fold cross-validation as the fitness function.
The GA parameters are detailed in section “GA parameters”.
combining method
1
|
1
0
1 0
{z
...
present/absent classifiers
z}|{
0
0
}
Experimental setup
Figure 2: Ensemble codification.
In these preliminary experiments we have used several algorithms implemented in the Waikato Environment for Knowledge Analysis - WEKA - (Witten & Frank 2000). This tool
includes all the algorithms used to generate the base classifiers and the ensemble generation algorithms.
Genetic search
In the last phase a standard genetic algorithm is applied so as
to evaluate each individual of the population and obtain the
ensemble optimal configuration as output of the system. We
have used a genetic algorithm because it is proved that they
can handle large and complex (multimodal) search spaces,
not requiring strong assumptions on the function to be optimized.
In order to evaluate each individual, we used the classi-
Datasets
For the experimental test of this approach we used 10 data
sets from the well-know repository of machine learning
databases at UCI (Blake & Merz 1998) (see Table 1). These
datasets have been used widely in other comparative works.
91
Ensemble approaches
Dataset
australian
balance
car
chess
diabetes
glass
hepatitis
hypo
ionosphere
vehicle
Attributes
14
5
6
36
8
9
19
25
35
19
Instances
690
625
1728
3196
768
214
155
3163
351
846
Classes
2
3
4
2
2
6
2
2
2
4
The ensembles of classifiers found by our approach, GAEnsemble (GAE), have been compared with three well-know
ensemble methods: Bagging, Boosting and StackingC (Seewald 2002) (StC). The base level classifiers of the StackingC
method have been included in the comparative for a better
evaluation.
• StC: Stacking with a reduced set of meta-level attributes.
We carried out experiments with two different numbers
of base level classifiers, three and six. It has been used
the same three base-level classifiers used in (Dzeroski &
Zenko 2002): C4.5, IBk and Naive Bayes. In the second
set of experiments we added the K*, Decision Table and
multi-response model tree (MMT).
Table 1: Datasets descriptions
Learning algorithms
• Bagging: method for generating multiple versions of a
predictor and using them to get an aggregated predictor.
We used the C 4.5 algorithm as base algorithm.
In order to obtain the optimal combination of classifiers, 15
learning algorithms have been used to generate the base level
classifiers, some of them with different parameters:
• A probabilistic Naive Bayes classifier (John & Langley
1995)
• Boosting: Method for improving the accuracy of any
given learning algorithm producing a series of sequential
classifiers. The basis for boosting is the C 4.5 algorithm.
• PART (Frank & Witten 1998). Its creates decision list
from partial pruning decision trees generated using C 4.5
heuristic.
GA parameters
•
C 4.5
(Quinlan 1993). It generates decision trees.
•
C 4.5
using unpruned tree.
The parameters used for the genetic algorithm in the preliminary experiments are shown in Table 2.
• Decision Stump (Iba & Langley 1992). It is an algorithm
that generates one level decision tree.
PARAMETER
P OPULATION SIZE
G ENERATIONS
E LITE RATE
C ULL RATE
M UTATION RATE
• Decision Table (Kohavi 1995). It is a simple classifier that
use the mayority class.
• Decision Table using the nearest neighbour instead of
global table majority.
VALUE
50
30
0.1
0.05
0.1
Table 2: GA parameters
• Classification Via Regression method. It classifies using
regression methods. The M5 algorithm (Quinlan 1992) is
used as the regression method.
Evaluating and comparing algorithms
• Random Forest (Breiman 2001). This algorithm constructs a Random Forest that forms combining a great
number of unpruned decision trees.
In order to evaluate our approach, we applied the genetic
algorithm three times in every search process. The best
individual obtained was saved. This individual encoded
an ensemble configuration, defining the combining method
and base-level classifiers. It was then compared with the
other ensemble approaches using a 10-fold cross-validation.
Weka’s paired t-test was used to test for significance with
the other algorithms (α = 0.05).
• Random Tree (Witten & Frank 2000). This algorithm
constructs a tree considering K random attributes at each
node. It does not carry out any pruning.
• VFI (Demiroz & Guvenir 1997). It is an algorithm that
generates a classifier that classifies an instance based on
features intervals.
Empirical results
• Conjunctive Rule. This algorithm generates a simple conjunctive rules classifier.
Table 3 shows the results obtained for GA-Ensemble, Bagging, Boosting and StC (with 3 and 6 base level classifiers).
In 4 of 10 domains, GA-Ensemble gets the best results, although differences with the best other systems are not statistically significant. If we add the differences between GAEnsemble and the other systems, GA-Ensemble gets a relative improvement (RAI) of 30.29% with Boosting, 33,99%
with Bagging and 23.53% and 3.65% with StC (3 and 6
BLC). With regard to the base level classifiers GA-Ensemble
gets a relative improvement of 52,7% with IBk, 51,61% with
• JRip (Cohen 1995). An algorithm that generates propositional rules.
• Nnge (Martin 1995). It is a nearest neighbor algorithm
that use non-nested generalized exemplars.
• HyperPipes (Witten & Frank 2000). It generates a classifier that constructs a HyperPipe for each category, which
contains all the points of that category.
92
Domain
australian
balance
car
chess
diabetes
glass
hepatitis
hypo
ionosphere
vehicle
RAI
GAE
86.66
96.31
97.68
99.56
76.81
72.90
84.50
99.05
93.42
77.91
—
Boosting
85.94
78.07
95.89
99.68
72.77
73.33
80.54
99.05
92.30
76.94
30.29
Bagging
86.37
81.59
92.59
99.40
76.04
71.51
79.95
99.11
90.85
73.40
33.99
IBk
82.31
85.58
92.99
96.18
70.83
69.13
81.29
96.90
87.15
69.74
52.7
K*
79.56
88.79
87.32
96.87
70.30
75.67
81.91
97.85
84.60
70.32
51.61
MMT
86.66
88.15
96.64
99.24
76.82
71.06
85.12
99.17
89.45
79.33
13.16
DT
84.05
74.87
93.57
97.55
73.44
70.47
79.12
98.95
90.57
65.49
56.72
C 4.5
84.78
77.91
91.72
99.40
75.65
61.23
76.58
99.17
90.57
72.57
55.22
NaiveBayes
77.82
90.39
85.58
88.10
75.91
49.54
85.24
97.81
81.76
45.38
107.27
StC(3)
85.36
89.59
92.88
99.40
76.43
68.70
84.54
99.17
92.86
72.34
23.53
StC(6)
86.52
89.11
96.81
99.40
75.90
76.16
84.58
99.11
92
81.56
3.65
Table 3: Accuracy of StC with different number of base-level classifiers (3 and 6), the base-level classifiers, Boosting, Bagging
and GA-Ensemble
K*, 13,16% with MMT, 56,72% with DecisionTable and
55,22% with C 4.5.
It is also interesting to consider the execution time, since
one of the objectives of this work was to reduce the execution time of GA-Stacking. GA-Ensemble has required a
much shorter time than GA-Stacking to finish the execution
of the genetic algorithm. Considering that GA-Ensemble has
to generate the base-level classifiers once per each execution
of the genetic algorithm and GA-Stacking had to train all
classifiers to calculate the fitness function of each individual
of each generation, the improvement in time is obvious.
Using a function to express this improvement, the time
required by GA-Stacking would be:
TGA−Stacking = ((T aBC ∗ N aCI ) + T aM C ) ∗ Ni ∗ Ng
where T aBC is the time average to train a base classifier, N aCI is the number average of classifiers which are
encoded in an individual, T aM C is the time average to train
a meta-classifier, Ni is the number of individuals in the population and Ng the number of generations of the genetic algorithm.
Whereas the function to express the time required by GAEnsemble would be:
TGA−Ensemble = (T aBC ∗ T nBC ) + ((T aM C ∗ AIm ) ∗
Ni ∗ Ng )
where T nBC is the total number of base classifiers and
AIm is the average of individuals in the population using a
meta-classifier as ensemble method.
shorter time than our previous approach, GA-Stacking. Empirical results in domains currently used in this field show
that GA-Ensemble is comparable to the best results reported
so far, and it is never significantly worse than the other systems tested (with the advantage that parameters such as the
number of base classifiers need not be specified in advance).
With respect to accuracy, if we add the relative improvements over the other systems across all the domains tested,
positive differences are always obtained, and quite large in
some cases. On the other hand, although GA-Ensemble has
improved the execution time with respect to GA-Stacking, it
may still require a long time depending on the used domain;
but for most domains this is not crucial, given that usually
classifiers do not require to be constructed in real time.
But accuracy is not always the only aspect used to evaluate ensembles of classifiers, although it is usually the only
issue considered relevant. Configuration size, classification
speed, etc, can also be the significant qualities in some domains. Further work in this preliminary algorithm can include the research of the flexibility of GA-Ensemble. For
instance, adding pressure to reduce the number of baseclassifiers. Also, it would be a good enhancement to add
information to the chromosome about the meta-level classifier to be used, as in GA-Stacking.
References
Altinçay, H. 2004. Optimal resampling and classifier prototype selection in classifier ensembles using genetic algorithms. Pattern Analysis and Applications 7(1):285–295.
Blake, C., and Merz, C.
1998.
UCI repository of machine learning databases.
databases
http://www.ics.uci.edu/∼mlearn/MLRepository.html.
Breiman, L. 1996. Bagging predictors. Machine Learning
24(2):123–140.
Breiman, L. 2001. Random forests. Machine Learning
45(1):5–32.
Cherkauer, K. 1996. Human expert-level performance on a
scientific image analysis task by a system using combined
artificial neural networks. In Working Notes of the AAAI
Workshop on Integrating Multiple Learned Models, 15–21.
Cohen, W. W. 1995. Fast effective rule induction. In Ma-
Conclusions and future works
In this paper, we have presented a preliminary version of
GA-Ensemble, an approach to find good ensembles configurations for a specific domain by means of genetic search.
This preliminary version of GA-Ensemble is based on a previous genetic approach, GA-Stacking, which was able to
generate, given a domain, a good Stacking configuration.
GA-Ensemble not only determines which base classifiers
must be present, but also the combining method of these
classifiers. One of advantages of GA-Ensemble inherited
from GA-Stacking is its flexibility and extensibility, since it
can use new learning algorithms as soon as they are invented
being not restricted by a priori assumptions. But its main advantage may be its improvement in time, requiring a much
93
Kohavi, R. 1995. The power of decision tables. In Proceedings of the Eighth European Conference on Machine
Learning.
Kolen, J. F., and Pollack, J. B. 1991. Back propagation
is sensitive to initial conditions. In Advances in Neural
Information Processing Systems, 860–867.
Ledezma, A.; Aler, R.; and Borrajo, D. 2001. Data Mining: a Heuristic Approach. Idea Group Publishing. chapter
Heuristic Search Based Stacking of Classifiers, 54–67.
Ledezma, A.; Aler, R.; Sanchis, A.; and Borrajo, D. 2004.
Empirical evaluation of optimized stacking configurations.
In 16th IEEE International Conference on Tools with Artificial Intelligence (ICTAI 2004).
Martin, B. 1995. Instance-based learning : Nearest neighbor with generalization. Master’s thesis, University of
Waikato.
Mitchell, M. 1996. An Introduction to Genetic Algorithms.
MIT Press.
Quinlan, J. 1992. Learning with continuous classes. In
Proceedings of the fifth Australian Joint Conference on Artificial Intelligence, 343–348. Singapore: World Scientific.
Quinlan, J. R. 1993. C4.5: Programs for Machine Learning. San Mateo, CA: Morgan Kaufmann.
Seewald, A. K. 2002. How to make stacking better
and faster while also taking care of an unknown weakness. In Claude Sammut, A. G. H., ed., Proceedings of the
Nineteenth International Conference on Machine Learning
(ICML 2002). Sidney, Australia: Morgan Kaufmann.
Witten, I., and Frank, E. 2000. Data mining: practical machine learning tools and techniques with Java implementations. Morgan Kaufmann.
Wolpert, D. 1992. Stacked generalization. Neural Networks 5:241–259.
Zhou, Z.-H.; Wu, J.-X.; Jiang, Y.; and Chen, S.-F. 2001.
Genetic algorithm based selective neural network ensemble. In Proceedings of the 17th International Joint Conference on Artificial Intelligence, volume 2.
chine Learning: Proceedings of the Twelfth International
Conference.
de Oliveira, L. E. S.; Morita, M. E.; Sabourin, R.; and Bortolozzi, F. 2005. Multi-objective genetic algorithms to create ensemble of classifiers. In Evolutionary Multi-Criterion
Optimization, Third International Conference, EMO 2005
Proceedings, number 3410 in Lecture Notes in Computer
Science.
Demiroz, G., and Guvenir, H. A. 1997. Classification by
voting feature intervals. In Proceedings of the 9th European Conference on Machine Learning, 85–92.
Dietterich, T. G., and Bakiri, G. 1995. Solving multiclass
learning problems via error-correcting output codes. Journal of Artificial Intelligence Research 2:263–286.
Dietterich, T. G. 1997. Machine-learning research:four
current directions. AI Magazine 18(4):97–136.
Dietterich, T. G. 2000. Ensemble methods in machine
learning. In Kittler, J., and Roli, F., eds., Multiple Classifiers Systems: first international workshop; proceedings
/MCS 2000, volume 1857 of Lecture Notes in Computer
Science, 1–15. Cagliari, Italy: Springer.
Dzeroski, S., and Zenko, B. 2002. Stacking with multiresponse model trees. In Fabio Roli, J. K., ed., Proceedings of Multiple Classifier Systems, Third International
Workshop, MCS 2002, Lecture Notes in Computer Science.
Cagliari, Italy: Springer.
Dzeroski, S., and Zenko, B. 2004. Is combining classifiers better than selecting the best one? Machine Learning
54(3):255–273.
Frank, E., and Witten, I. 1998. Generating accurate rule
sets without global optimization. In Proceedings of the
Fifteenth International Conference on Machine Learning,
144–151. Morgan Kaufmann.
Frank, E.; Wang, Y.; Inglis, S.; Holmes, G.; and Witten,
I. 1998. Using model trees for classification. Machine
Learning 2(32):63–76.
Freund, Y., and Schapire, R. 1995. A decision-theoretic
generalization of on-line learning and an application to
boosting. In Springer-Verlag., ed., Proceedings of the
Second European Conference on Computational Learning
Theory, 23–37.
Goldberg, D. E. 1989. Genetic Algorithms in search, optimization, and machine learning. Addison-Wesley.
Holland, J. H. 1975. Adaptation in Natural and Artificial
Systems. The University of Michigan Press.
Holland, J. H. 1992. Adaptation in Natural and Artificial
Systems. MIT Press, 2ł edition.
Iba, W., and Langley, P. 1992. Induction of one-level
decision trees. In Proceedings of the Ninth International
Conference on Machine Learning, 233–240. Morgan Kaufmann.
John, G., and Langley, P. 1995. Estimating continuous
distribution in bayesian classifiers. In Kaufmann, M., ed.,
Proceedings of the Eleventh Conference on Uncertainty in
Artificial Intelligence, 338–345.
94