Satisfiability in Nonlinear Time: Algorithms and ...
advertisement

From: Proceedings of the Twelfth International FLAIRS Conference. Copyright © 1999, AAAI (www.aaai.org). All rights reserved.
Satisfiability
Frank D. Anger*
Univ. of W. Florida
fangerQnsf.gov
in Nonlinear Time: Algorithms and Complexity
Debasis Mitra
Morgan State Univ.
dmit ra@stallion.jsums.edu
Abstract
Most work on temporal interval relations and associated
automated reasoning methods assumes linear (totally ordered) time. Although checking the consistency of temporal interval constraint networks is known to be NP-hard in
general, many tractable subclasses of linear-time temporal
relations are known for which a standard O(ns) constraint
propagation algorithm actually determines the global consistency. In the very special case in which the relations are
all ~pointizable," meaning that the network can be replaced
by an equivalent point constraint network (on the start and
finish points of the intervals), an O(n21 algorithm to check
consistency exists. This paper explores the situation in nonlinear temporal models, showing that the familiar results
no longer pertain. In particular, the paper shows that for
networks of point relations in partially ordered time, the
usual constraint propagation approach does not determine
global consistency, although for the branching time model,
the question remains open. Nonetheless, the paper presents
an O(na) algorithm for consistency of a significant subset
of the pointizable temporal interval relations in a general
partially ordered time model. Beyond checking consistency,
for the consistent case the algorithm produces am example
scenario satisfying all the given constraints. The latter result benefits planning applications, where actual quantitative values cam be assigned to the intervals.
Keywords: Temporal Reasoning, Constraint Satisfaction, Non.linear Time, Complexity
1
Introduction
Temporal reasoning applications are often treated as constraint satisfaction problems in which a qualitative temporal
constraint network is constructed with incomplete information represented as a disjunctive labeling on the arcs. Nodes
in the network represent temporal entities (points or intervats) and arcs are labeled by the known relations between
the entities. If a solution to the given constraints exists,
one can be found by selecting one atomic (or unambiguous)
label from each label set and testing the consistency of the
choice using a table of compositions of the temporal relations. If most or all labels are ambiguous, this approach is
exponential in the number of arcs in the network and hence
highly intractable.
A much more attractive alternative is
the use of a Constraint Propagation (CP) algorithm such
as presented in (Allen 19981. Although this algorithm, running in O(n~) time, determines only path consistency, which
is, in general, weaker than (global I consistency, CPis often
used for approximate reasoning. Thus, if CP detects path
*Currently at the National Science Foundation, Computer and Information Science and Engineering Directorate.
Rita V. ltodriguez*
Univ. of W. Florida
rrodriguQnsLgov
inconsistency, the network is inconsistent, while if it finds no
inconsistency, confidence is raised in the consistency of the
information. CP, in addition, reduces the disjunctive label
sets on the arcs, discarding relations ~.hat cannot participate in a~ty path consistent scenario. ~’- .~ a consequence, CP
is often used together with incremental guessing (alternately
run CP and select an atomic relation from a remainiltg nonatomic arc label until all labels are atomic) to create a complete algorithm for consistency that, although exponential
in worst case, appeaxs to run in time O(na) on average (see
for example Ladkin and Reinefeld 1997).
For some situations, however, path consistency and consistency are the same, and in these cases a CP algorithm
checks the global consistency in O(n~l time. Such cases
include, in linear time, the point algebra, ~4, pointizable
interval relations, and a whole host of other subalgebras of
the complete interval algebra, Z.A [see (Nebel ~.nd Buerkert 1994), (Drakengren and Jonsson 1996), (Ligozat 1996),
(Drakengren and Jonsson 1997)]. (More recently, these same
researchers have extended our knowledge of the tl actable Mgebras and subalgebras to a number of spatial models as well
(Renz and Nebel 1997), (Jonsson and Drakengren 19971,
(Drakengren and Jonsson 1999/. Even more efficient, in the
case of 7>,4 or the pointizable interval relations, sn algorithm
given in (van Beek 1990) checks global consistency in O(n21
time, producing at the same time one consistent scenario for
the network.
For some applications, such as analysis of distributed systems, cooperating robots, and some fanning systems, linear time does not constitute the mo~.: appropriate model
(Emerson and Halpern 1986), (Dean and Boddy 1988),
(Anger 1989), (Emerson and Srinivasan 19891. (Winskel
1989); notwithstanding, the complexity of deten~xining consistency in nonlinear modelsis not as well studied as in linear
time (Anger and Rodriguez 1991). Clearly the .’omplexity
in nonlinear time equals or exceeds that in linear time, but
the lineal-time constraint propagation algorithm generalizes
easily to branching time and other partially ordered tempored models. In these models, then, path consistency can
still be determined in O(n~) time, but as fax as the authors
know, no one has determined when path consistency implies
global consistency.
(Comparewith the references cited in the preceding paragraph for extensive recent work on this question for linear
2)
time.) Moreover, there are no parallels for van Beek’s O(n
algorithm in the more complex temporal models. This paper
explores these questions with perhaps ~:trprising results and
presents an O(n3) slgorithm for the special case of partially
ordered time in whichall relations ar~’ ~ointizable i eq~fivalent
to a network of disjunctive point relations) and do not give
rise to either of two excluded relations As a side effect of
the inherent data-structure of the algorithm, a quantitative
scenario for such a network may be generated once shown
consistent. These features could benefit the chosen applb
Copyright t~1999. AmericanAssociation for Artificial Intelligence.
All rights reserved. {http://www.aaai.org)
406
ANGER
cation areas. In this paper, we describe the algorithm and
prove its correctness. In addition, we show that the usual
constraint propagation method for determining path consi¯tency of ambiguous constraint networks extends to partinily ordered time, but does not determine global consistency even in the case of point relation¯.
2
The Partially
Table
l."
=
<
II
>
Ordered Time Model
The temporal modeling literature
utilizes many non-linear
temporal models. Branclfing time most often refers to ~lure branching time, in which the past is unique and linear
whi/e the future has multiple branches, usually representing
multiple possible futures. In some cases, such as diagnostic
systems, time may branch into the past, indicating possible
causes of a known present. For modeling distributed systems, event¯ may be seen to take place in a collection of
parallel world¯, representing the different processors, with
differing assumptions about relations between these worlds
(Lamport 1978). Researchers in distributed
system¯ and
mobile networks (Lamport 1986), (Rodriguez 1993),
driguez and Anger 1993) have also found relativistic
spacetime of interest. Finally, time may also be treated as an
arbitrary partially ordered set in which some points are related and others not.
As an example in which partially ordered time is appropriate, consider a collection of date-stamped data collected
at various site¯, such as sightings of animals or vehicles. At
each site, the data is reported in a linear order but only the
date is recorded, so that it is impossible to tell the actual
order between two sightings on the ¯ante day at different
location¯: such sightings could be considered =unrelated."
In reasoning about such data, if sightings $1 and $2 are unrelated but S~ is before Ss, we knowthat $1 cannot be after
Bs (In this application, =after ~ means recorded later at the
same site or on a later dam at a different site.) If a lineartime model were used, we would be forced to say that the
relation between $1 and S~ is =unknown,z which would leave
the relation between $1 and S~ likewise unknown, since no
information can be derived from an unknown relation. Another application of the same order structure, although the
interpretation
is not temporal, would be in a document retrieval system. Two documents could be considered to be
either the same, one a subdocument or superdocument of
~
the other, or unrelated documents. (This use of =unrelated
must include the case of 2 documents that contain a common subdocument, such as anthologies that contain some of
the same articles. If we distinguish the two relations =disjoint s and %verlapping, ~ we obtain the equivalent of the
spatial model RCC-5 (P~ndell and Cohn 1989) discussed
later.) The relation algebra and satisfiability
problems that
arise in this application axe in a strong sense equivalent to
those of the temporal model we will discuss.
To develop more precisely the rules for reasoning with a
partially ordered temporal model, begin with a partially order set (T, <) of time points, T, where =<s is a strict partial
order (transitive, irreflexive). The notation =1[" (unrelated
or parallel) indicates that two point¯ are not temporally related to one another: zll y iff not(z < y) and not(z = y)
not(z > ~/). The Point Algebra, ~,4 (po), for point relation¯
in partially ordered time, consists of the 24 = 16 (ambiguous) relations that can be specified between two point¯ in
paxtially ordered time. For ambiguous relations, we either
~
juxtapose the basic relations, so =less or equal or greater
becomes =<=>,n or use standard notations for others, such
Table of Compositions
Orde_-ed T-~me
Table
2:
in
Partially
=
<
II >
=
<
II >
<
< <II 1
II <II z II>
>
z II > >
Table of Compositions
Time
in Branching
- >
< II
<
II
>
<
II
>
< <II[ /i
II zI II >
1
II
>
as _< or ~. =1s is used for unknownor the universal relation.
Wewill also discuss (future) branching time, in which the
condition is added that (intuitively) prohibits any joining
different temporal branches: any two possible futures are
disjoint.
¯ Branch: No two unrelated
bound.
The Branch condition
relations as
time points have an upper
can be written in terms of point
s Branch: /1 z[] y and y < z then
all
z.
The algebra of point relations in branching time will be
called 7>.4 (br). Under these definitions, the table of compositions of the point relation¯ {<, I[, >, = ) differ¯ from
general partially ordered time to branching time, as given
in Table¯ 2 and 3 respectively. (Composition refer¯ throughout to the usual mathematical composition of relations, although the composition table equates to what Allen refers
to as the transitivity table.) The difference stems from not
allowing branches to rejoin, expressed by setting the composition of I[ with < to H, rather than < [] as found in the
more general model. (Note also that the composition of
with > is J~rather than 1 .) This distinction between the
past and the future also has the rather unpleasa,tt result of
making the composition of point relations non-commutative
in branching time.
In these models, we are also interested in temporal interval relations.
Definition: An interval in (T, <) is a pair o/ points (t, u)
with t < u.
The definition of interval doe¯ not concern itself with
what is "between" the two endpoints, so we assume that the
temporal interval relations I r J between two intervals are
completely determined by the possible point relation¯ between the pairs of endpoints of the tw.~ intervals. (See, for
example, (Anger, Ladkin, and Rodrigl.ez 1991) for a more
complex approach to branching-time relations.)
While linear time has the well-known 13 temporal interval relations
given in (Allen 1983), there are 29 possible atomic temporal
interval relations between two intervals in partially ordered
time and 24 in branching time (Anger and Rodriguez 1993).
SPATIOTEMPORALREASONING407
b
_
_<
<>
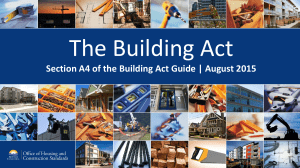
Figure
Figure
3
1: A Path Consistent,
Network in Partially
and
Constraint Propagation (CP) algorithms have been widely
used in temporal reasoning, as well as for other constraint
problems, as a means of determining consistency, or at least
partial consistency, of a collection of constraints. For temporal reasoning of this nature, one begins with a network
whose nodes represent temporal entities (points or intervals
or a mixture of both), and whose arcs are labeled by temporal relations between the two nodes joined by the arc. There
is a hierarchy of consistency conditions: node consistency,
arc consistency, 3-cousistency (or triangle consistency), path
consistency, and, more generally, k-consistency for any k _<
the number of nodes in the network. Since all temporal
constraint networks are node and arc consistent, we will not
discuss them here. Three consistency says that every triangle (i, j, k) in the network is consistent, meaningthat given
2 temporal entities I~ and Ik (points or intervals, as the case
may be) that satisfy the relation r(i, k) given between nodes
i and k, there exists an lj satisfying the other two relations
of the triangle: I, r(i,j) Ij and i r (j, k ) I ~. A le mma of
Ugo Montanari (Montanari 1974), asserts equivalence between 3-consistency and path consistency. The latter imposes a similar demand for finding entities along may path
vl, aa,..., eL in the network: if two temporal entities 11 and
lk can be found satisfying the relation on the arc vl --> vk,
then entities In..., lh-1 can be found satisfying the other
k - 1 relations along the path. Because path consistency
does not, in general, imply global consistency (Mackworth
and Fteuder 1985), (Freuder 1978) and others have studied
k-consistency, referring to the consistency of all subnetworks
on k nodes. K-consistency will not be pursued beyond k =3.
Ladkin and Maddux (Ladkin and Maddnx 1988) show
that path consistency determines consistency for a network
of point relations (in linear time). This result extends easily
to pointizable interval relations, which include all the atomic
interval relations. Pointizable relations also form a closed
algebra under composition, conjunction, and converse.
Theorem1: For point relations in partially ordered time,
path consistency does not imply global ~onsistency.
Proof: The point network in Figure 1 is path consistent
but not consistent. Moreover, Constraint Propagation will
not reduce the labels on the arcs, even though the minimal
feasible label set is empty.
ANGER
Forbidden
Subgraph
Inconsistent
Point
Ordered
Time
Consistency, Path Consistency,
Constraint
Propagation
408
2: Van Beek’s
Thecomposition
<> o [[ is ~, whichdoesnotreduce<>,
while the compositions <> o <> and [[o[[are
both 1,
which cannot reduce anything. Therefore the network is
path consistent. On thc other hand, ,lny consistent ~ccnario
must set a < b or a > b. Assuming a < b. the composition
< o II in the triangle (a, b, e) and [I o < in the triangle (c, a,
both yield < ][, implying a < e and c < b. Repeating this in
triangles (d, a, e) and (c, b, d) implies d < e and c < d.
then c < d < ¯ implies c < e, contradicting ell e. D
The foregoing proof can be generalized to show that a
complete (a~d path-consistent) network on n nodes with one
cycle of length n labeled entirely by "<>" while all other
relations are "ll ~ will be inconsistent whenevern > 3 is odd
but can be reduced to a path-consistent atomic network if
n is even. Simply note that if two consecutive arcs in the
cycle labeled with "<>" were chosen to be bo!h "<:" thcir
composition would also be ~<~ contradicting that it is given
to be "ll." Therefore, the arcs going around the cycle must
alternate <, >, ... This is clearly impossible if n is odd and
provides a path-consistent atomic network if n is even.
A number of other interesting
examples can be constructed from this example indicating a rocky road from
path consistency to consistency in 7)A (po). Firstly, replacing one "<>" relation by "< [[" produces a consistent network which CP will not reduce even though any consistent
scenario must choose "ll ~ for the altered arc; on the other
~ relation
hand,replacing
instead
one"II
by "<II" produces
another
consistent
network
whichCP willnot reducebutin
which"<" mustbe chosenfor thatarcfor consistency.
If
g= " is addedto all the~<>~relations,
converting
allto
"J~," applying
CP willsimplyreducethe network
backto
thatin FigureI. Thus,thenetwork
is stillpathconsistent
andinconsistent.
Finally,
adding
"----"" toallthelabels
of
Figure1 produces
a consistent
networkwhichCP will not
reduceandin which"= ~ mustbe chosenforall labelsto
obtaina consistent
scenario.
The moredifficult
problemof findingthe set of minimal feasible
labelsof a network(Vil~,in,
Kautz~and van
Beek1989),(Loganantharaj,
Mitra,and Naidu1991)clearly
worsensin P J[ (po).Van Beek(van Beekand Cohen1990)
showsthatin lineartime,if CP applh:d
to a pointrelation
network
doesnot produce
the minimal
labels,
thenthereis
a subnetwork
isomorphic
to hisforbidden
~ubgraph
shownin
Figure
2.
Thesituation
inpartially
ordered
timeisquitedifferent,
as seenin the consistent
examples
given~tboveby modifyingFigure1. All thoseexamples
areirreducible
by CP but,
as commented, do not have minimal labels because at least
one label has one consistent choice and other inconsistent
choices; nevertheless, none of these examples contains van
Beek’s forbidden subgraph as a subnet. (Of course, the forbidden configuration itself remains non-minimal in partially
ordered time as well, where the ~" label could be interpreted as <> or < [I >.)
In conclusion, whereas constraint propagation constitutes
an effective O(ns) technique for determining (global) consistency of point relations in linear time, CP does not perform this task in partially ordered time. Interestingly, in
the branching time model, the example of Figure I is shown
to be inconsistent by constraint propagation! This happens
since in that model, <> o [[ is < [I, making the subnet
on any 4 nodes connected by <> inconsistent.
Thus the
question of the relation between path consistency and consistency in ~.A (br) remains open.
Another direction of recent research activity has been to
look for subAlgebras of the interval algebra (in linear time)
for which consistency can be determined in polynomial time
(Nehel and Buerkert 1994), (Drakengren and Jonsson 1996,
1997), (Renz and Nebel 1997). Literally hundreds of such
(tractable) subalgebras have been determined, in all of which
the standard constraint propagation algorithm determines
consistency in O(ns) time. Alien already recognized in his
1983 paper that any path-consistent
network with atomic
linear-time interval labels is also consistent. We remarked
in Section 2 that the pointizable relations in linear time
enjoy the same property and that they contain the atomic
relations. In the case of partially ordered time, since even
the po~nt (hence pointizable) relations are not a tractable
set, there are likely to be manyfewer interesting tractable
sets; nonetheless~ the next section describes such a set and
provides an O(na) algorithm for determining consistency of
any network in partially o~lered time with labels in that
set and for producing a consistent scenario modeling the
network.
4
Section 4: Partially Ordered
Temporal Network Algorithm
In the foregoing section, Figure 1 illustrated
a pathconsistent, inconsistent constraint network over the point ~1.
gebra, ~.A (po), demonstrating an inherent increase in comp|exity when passing from linear time to partiAny ordered
time. The next task undertakes the definition of a subalgebra of ~,4 (po) which is tractable in the sense that path
consistency implies consistency. This subalgebra, which we
will call ~.4tra¢ (po) (for tractable 7~.4 ), is obtained by simply excluding the two relations
"<>" and ~" (’<=>’).
A straightforward
check shows that ~.At~c (po) is closed
under composition, converse, and conjunction. These two
excluded relations insist that the two points are related to
each other in the partial order but do not determine the order between them. Wehave also seen examples with each of
them that form path consistent but inconsistent networks,
so the subaigebra is the maximal tractable subset. In fact,
a much stronger result can be stated based on the work of
Jonsson and Drakengren (Jonsson and Drakengren 1997),
( Jonsson 199g).
Theorem 2: The consistency
problem over ~.A (po)
NP-comldete. ~Atrac (po) contains 1~ of the 16 relations
and is the -nique mazimal tractable subalgebra of ~.4 (po)
which contains all #he atoms (<, -- , >, 11). There are,
however, 8 other maximal tractable snbalgebras ,,ith
and 9 relations, respectively:
10, I0,
1. The 8 linear.time relations together with ~ and 1 .
2. The 8 relations containing 1]" along with -- and ~.
3. The 8 relations
containing ’~ " along with 0.
Proof: (Follows (Jonsson 1998).) The spatial algebra
RCC-5consists of the most basic possible relations be! ween
two sets or "regions": subset (pp), equal (eq), superset (ppi),
disjoint (dr), and partially overlapping (po). The satisfiability (and consistency) problem in RCC-5was recently shown
to be NP-complete (Jonsson and Drakengren 1997). In the
same paper, Jonsson finds all maximal :ractable subaigebras
of RCC-5, which he names R~s, R~°, R~7, and R~4. KCC-5
contains 2~ = 32 relations, while the superscript on the subalgebras indicates the number of relations in the subalgebra.
A mapping ~r: ~’.4 (po) --> RCC-5is defined by the most
natural association:
o(<)= pp, o(>) = ppi, if(-- )=
and o(]]) = dr+po. It can be shown that a (finite) collection of time points satisfying a constraint problem over any
subset ~ of ~’.A (po) can be translated into a collection
sets satisfying the ~r-image constraint problem over or(R),
and conversely. Thus the complexity of consistency over
7~.A (po) and its subalgebras is the same as that of their images in RCC,-5under ~r. Since cr(7>.A (po)) notcontained
in any of the maximal tractable subalgebras of RCC-5identified by Jonsson, consistency is NP-hard over o(P.4 (po))
and hence over ~.A (po). The maximal tractable subaigebras of ~.A (po) will be the 4 algebras which are the inverse
images under ¢r of the for maximal tractable subalgebras of
RCC-5. These can be determined from Table 2 in (Jonsson
and Drakengren 1997) to be those stated in this theorem.
It is also clear that only the largest of the 4 subalgebras
contains all the atoms. D
The algorithm developed below will determine the consistency of any constraint network with n nodes over the
subalgebra ~’Atra¢ (po) in O(, a) time using truly operations that depend on path consistenc~. Moreover, with the
saane asymptotic complexity, one consistent scenario is determined if the network is consistent. As a side effect, therefore, the algorithm shows that path consistency implies consistency in such networks.
Assumptions:
s (T, <) is a partially
ordered temporal model
s ~.A~rac (po) the algebra of point relations over (T,
excluding the relations ~<>" and’~J~ ."
Network N consists of nodes v~,v~,...,v,
and arcs vi
--> ~j for all i, j labeled by relations r(i,j) i:t ~.Atrac (po).
Without loss of generality, we assume r(j,i) is the converse of r(i,j). (> is the converse of <, while "-----" and "i]
axe both self-converse.)
A consistent scenario in linear time would consist of a
totally ordered set of n points satisfying all the relations
r(i, ]). For partially ordered time, a consistent scenario can
be given in the simplest form by a directed at.relic graph
(DAG), G, on n nodes representing the successor graph of
a partially ordered set. Such a graph has an arc t,~--> vj
exactly when ’~i is the immediate successor of v;: i.e., iff
[r(i,j)
= "<" and there exists no k with r(i, k) = r(k,j)
~<"].
Partial-Order
Consistency
(POC) Algorithm:
The
algorithm to find a consistent scenaxio proceeds in 3 stages:
SPATIOTEMPORAL
REASONING 409
1. Eliminate all atomic u=" relations (by identifying any
pair of nodes that are joined by an ~=" arc). An inconsistency is detected whenidentifying vi with vi if there
is a k with r(k,i) & r(k,j) = ~; otherwise this
junction forms the label for the new arc vk--> vi. Assume that n represents the number of resulting nodes.
2. Form the graph G on {1, 2 .... n} with an arc from i to
j iff r(i, j) is u<, or ~<." Formthe transitive closure,
C(G), of this graph by adding an arc i--> j whenever
there is a k with i--> k and k--> j. When adding the
arc, replace r(i, j) by r(i, j) (r (d, k) o r( k, j) ). If
newlabel is ~----~(as will be the case if the former r(i,
or "ll =’), both ,(i,k) and r(k,j) must have
was
been ~_~," ~nd hence are forced to be ~-." Repeat step
1 for the triangle (i,j, k), possibly detecting an inconsistency. On the other hand, if this newlabel r(i, j)
empty, an inconsistency is detected. Otherwise, r(i, j)
must be ~<" or ~_.~
At the end of this step, if no inconsistencies were detected, C(G) is tr ansitively cl osed di rected ac yclic
graph (DAG) satisfying i-->j iff r(i,j)
is < or <_.
There are no atomic "=" labels in the network, so each
r(i, j) for which (i, j) is NOTan arc in C(G) is one of
<il, <ll =, II, II =, <li >, or 1 (or the converse).
At this point, we claim that the network is consistent
because all arcs not in C(G) allow ~[[ ." Replacing all
such labels by [] and all ~ labels by < produces a network consistent with the original network but with a
consistent scenario of the partially ordered set defined
by C(G): i < j iff i--> j. This relation is a partial
order (transitive,
antisymmetric) by construction and
relates no points i and j that have r(i,j) =
3. Form the successor graph S(G) from C(G) (or f~om
G) by deleting any arc i--> j if there is a k with arcs
i--> k and k--> j (just the opposite of the transitive
closure construction, eliminating implied < relations
rather than adding them). The resulting graph represents a consistent scenario for the original network in
the simple form desired.
The complexity of this algorithm is the maximumcomplexity of any of its 3 parts.
Part 1 searches through the arcs. For each "= ~ found, it
collapses a numberof pairs of arcs: specifically, for the kth
a=, arc found, the algorithm will collapse 2 nodes into 1
and n - k - 2 pairs of arcs into n - k - 2 new arcs. The total
complexity is therefore, in worst case, ~-~:ffi~(n- k - 1)
O(n2).
Part 2 forms the transitive
closure on a graph with n
s)
nodes, which can be done with standard algorithms in O(n
time. Once again, there may be some collapsing of arcs and
nodes due to ~=" labels, but the sum of the time spent in
Part I and in this part on this activity cannot exceed O(n2).
Part 3 is essentially the same algorithm as in Part 2, except it removes rather than inserts arcs. Starting with the
topologically sorted G, it also requires O(n3) time.
The overall complexity is therefore O(n3).
Theorem 3: Algorithm I correctly solves the consistency
problem and produces a consistent scenario (in the consistent case) for any constraint network of point relations in
partially ordered time provided the network labels are in
~.Atm¢ (po): i.e., the network does not contain either
the labels "<>" or "<=>." The algorithm has asymptotic
time complezity O(na).
410
ANGER
Note that if instead of point relations we begin with a
network of polarizable interval relations that do not utilize
"<>" or ~<---->~ in their point representations, the algorithm would have to start by translating into a point network, thereby turnin§ an n-node network into a 2n-node
network in time O(n ). After finding the point solution,
translation back into original intervals could take place, but
whether there is some appropriate representations of the interval scenario other than the successor graph of the points
is not clear.
Corollary: Algorithm 1 plus translation solves the consistency problem and produces a con.~i~lent ~cen,rio (il~ the
consistent case) for any constraint network of pointizable
interval relations in partially ordered lime provided the associated point-relation network does not contain either of the
labels "<>" or "<-->." The algorithm has asymptotic time
complezityO( n Z )
Weremark that there should be no difficulty in extending this result to hybrid networks containing point-point,
interval-interval,
and point-interval relations, provided all
are pointizable and give relations in 7~.Zltrac (po).
5
Conclusion
For applications such as distributed systems which require
a non-linear temporal model, we have shown that although
standard temporal reasoning techniques such as constraint
propagation can still be used, the complexity increases in a
way not solely attributable
to the increase in the number
of temporal relations. In particular, the general consistency
problem for point relations in partially ordered time was
shown to be NP-complete, and an ex~ mple of aa inconsistent, path consistent network of temporal point relations
in partially ordered time was provided. All (4) maximal
tractable subalgebras of the algebra of point relations in partinily ordered time were identified, and an O(na) algorithm
was developed for finding a consistent scenario, or showing
none exists, for the largest of these subaigebras: only <>
and <=> are excluded. These algebras of relations provide
further examples of the general rule (to which the authors
knowno exceptions) that the "algebra i., tractable if and only
if path consistency implies consistenc~, which means that
constraint propagation suffices to determine consistency.
With a consistent network, the graph generated by the
algorithm additionally contributes to the development of a
plausibh quantitative scenario based on the qualitative input information, which is being parsed by the algorithm.
Whenquantitative information is available a priori about
some of the end-points of the intervai~, as found in many
problem domains such as the geological one, a more accurate quantitative scenario may be developed. Our approach’
also easily handles hybrid information involving point relations together with interval relations.
Acknowledgments: One of the authors was partially
supported by grant NCC3-437 from NASA.
References
[1] Allen, J. 1983. Maintaining Knowledge aboul Temporal
Intervals.
Comm. of ACM26(11):832-843.
[2] Allen, J. 1984. Towards a General Theory of .kction and
Time. Artificial Intelligence 23:123-154.
[3] Anger, F. 1989. On Lamport’s lnterprocessor Comnmnication Model. A CMTrans. on Prog. Lang. and Systems
110):404-41r.
[4] Anger, F., Ladkin, P., and Rodriguez, R. 1991. Atomic
Temporal Interval Relations in Branching Time: Calculation mad Application. In Applications of Artificial
Intdligence IX, 122-136. Orlando, FL: SPIE.
[5] Anger, F. mad Rodriguez, R. 1991. Time, Tense, and Relativity Revisited. In Bouchon-Meunier, B., Yager, R.,
and Zadeh, L., eds. Lecture Notes in Computer Science.
New York:Springer-Verlag.
[6] Anger, F. mad Rodriguez, R. 1993. The Lattice Structure
d Temporal Interval Relations, Notes of the IJCAI-93
Workshop on Spatial and Temporal Reasoning, Chambery, France:71-86. Also in 1996 J. of Applied Intelligence 6(1):29-38.
[7] Dean, T. and Buddy, M. 1988. Reasoning about Partially Ordered Events. Artificial Intelligence 36(3):375399.
[8] Dechter, R., Meiri, I., madPearl, J. 1991. TemporalConstrain, Networks. Artificial lntdligenee 49:61-95.
T. and Jonsson,
P. 1996. Maximal
[9] Drakengren,
Tractable Subclasses of Allen’s Interval Algebra: Preliminary Report. In Proceedings of the Thirteenth National
Conference on Artificial Intelligence (AAAI), 389-394.
Portland, OR.: AAAI Press.
[10] Drakengren, T. and 3onsson, P. 1997. Towards a Complete Classification of Tractability in Allen’s Algebra.
In Proceedings of the Fifteenth International Joint Conference on Artificial Intelligence,
1466-1471. Nagoya,
Japan: IJCAI, Inc.
[11] Drakengren, T. mad Jonsson, P. 1999. Reasoning about
Set Constraints Applied to Tractable Inference in Intuitionistic
Logic. Journal of Logic and Computation.
Forthcoming.
[12] Emerson,E. ~z Halpern,J. 1986. "Sometimes" and "Not
Never" Revisited: On Branching Versus Linear Time
Temporal Logic. Journal of ACM33(1):151-178.
[13] Emerson, E. and Sfinivasma, J. 1989. Branching Time
Temporal Logic. In J. de Bakksr, W.-P. de Roever, G.
Rozenberg, eds. Linear Time, Branching Time and Par.
tial Order in Logics and Models for Concurrency, 123172. New York: Springer-Vexing.
[14] Freuder, E. 1978. Synthesizing Constraint Expressions.
Comm. of the ACM21:958-966.
[15] Jonsson, P.and Drakengren, T. 1997. A Complete Classification of ciVic, ability in RCC-5.Journal oJ Artificial
Intdligence Research 6:211-221.
[16] Jonsson, P. 1998. Private communication.
[17] Ladkin, P. mad Maddux, R. 1988. On Binaxy Constraint
Networks, Technical Report KES.U.88.8, Kestrel Institute, Palo Alto, CA.
[18] Ladkin, P. mad Reinefeld, A. 1992. Effective Solution
d Qualitative Interval Constraint Problems. Artificial
Intelligence 57:105-124.
[19] Lamport, L. 1978. Time, Clocks mad the Ordering
d Events in a Distributed
System. Comm. of ACM
21(7):558-565.
[20] Lamport, L. 1986. The Mutual Exclusion Problem:
Part I-A Theory of Interprocess
Communication; Part
II-Statement
and Solutions.
3ournal ACM33(2):313348.
[21] Ligozat, G. 1991. On Generalized Interval Calculi. In
Proceedings of the Ninth National Conference on Artificial lntdligence,
234-240. Anaheim, CA: AAAIPress.
[22] Ligozat, G. 1996. A NewProof of ’/’raclability
tbr
ORD-HornRelations. In Proceedi,tgs of the Thirteenth
National Conference on Artificial Intelligence, 395-401.
Portland, OR: AAAIPress.
[23] Logmaantharaj, R., Mitts, D., and Naidu, G. 1991. Efficient Exact Algorithm for Finding All Consistent Singleton Labeled Models. In Proceedings of the IEEE Robotics
and Automation Conference, Nice, France.
[24] Mackworth,A. Sz Freuder,E. 1985. The Complexity of
Some Polynomial Network Consistency Algorithms for
Constraint Satisfaction Problems. 4rtificial Intelligence
25:65-73.
[25] Meiri, I. 1996. Combining Qualitative and Quantitafive Constraints in Temporal Reasoning. Artificial Intelligence 87:343-385.
[26] Montanari. 1974. U. Networks of Constraints: Fnnda~
mental Properties and Applications to Picture Processing. Inlormution Science 7:95-132.
[27] Nebel, B. and Buerckert, II.-J. 1994. Reasoning about
Temporal
Relations:
A Maximal"Practable
Subclassof
Allen’s
Interval
Algebra.
In Proceedings
of theTwel/th
National Conference on Artificial Intelligence, 356-361.
Seattle, WArAAAIPress.
[28] Randell, D., and Cohn, A. 1989. Modelling Topological
and Metrical Properties of Physical Processes. In Proceedings of the First International Conference on Principles of Knowledge Representation and Reas,mil~g (K R89), 55-66. Toronto, Canada: Morgan Kaufma,.
[29] Renz, 3. and Nebel, B. 1997. On tile Complexity oI
Qualitative Spatial Reasoning: A Tractable Fragment
of the Region Connection Calculus. In Proceedings ol
the Fifteenth International Joint ¢. onference on Artificial Intelligence, 522-.527. Nagoya, Japan: IJCAI, Inc.
[30] Rodriguez, R. 1993. A Relativistic
Temporal Algebra
for Efficient Design of Distributed Systems. Applied lntdligence Journal 3(1):31-45.
[31] Rodriguez, R. and Anger, F. 1993. An Analysis of
the Temporal Relations of Intervals in Relativistic
Space-Time. In B. Bouchon-Meunier, L. Valverde. and
R. Yager, eds. Lecture Notes in Computer Science:
Advanced Methods in Artificial Intelligence,
139-148.
Bedim Springer-Verlag.
[32] van Beek, P. 1990. Reasoning about Qu’,ditative rentporal Information. In Proceedings of the Eighth National
Conference on Artificial Intelligence, 7pp. Boston, MAr
AAAI Press.
[33] van Beck, P. and Cohen, R. Exatt and Approximate
Reasoning about Temporal Relations.
Computational
Intelligence 6:132-145.
[34] Vilain, M. and Kautz, }t. 1986. Constraint Propagation
Algorithms for Temporal Reasoning. In Proceedings ol
the Fifth National Conference on Artificial Intelligence,
377-382. Pittsburgh, PAr AAAIPress.
[35] Vilain, M., Kantz, I-I., and van Beek, P. 1989. Constraint Propagation Algorithms for Tempor’,d Reasoning: A Revised Report. In D. S. Weld and J. de Kleer,
eds. Readings in Qualitative Reas,niug about Phys,:ai
Systems, 373-381. San Mateo, CA: Morgan-Kaufman.
[36] Winskel, G. 1989. An Introduction to Event Structures.
In J. de Bakker, W.-P. de Roever, G. Rozenberg, eds.
Linear Time, Branching Time and Partial Order in Logics and Models for Concurrency, 364-397. New York:
Springer-Verlag.
SPATIOTEMPORAL
REASONING 411