ManufacturingInformation Coordination and System
Integration By A Multi-Agent Framework
From: AAAI Technical Report WS-94-02. Compilation copyright © 1994, AAAI (www.aaai.org). All rights reserved.
Riyaz Sikora
Michael J. Shaw
Artificial Intelligence group
BeckmanInstitute for AdvancedScience and Technology
University of Illinois at Urbana-Champaign
Urbana, IL 61801.
Abstract
Modelingtypical enterprise information systems requires the modelingof multiple
agents with different functionalities. This paper describes a methodology
that provides the
representational formalism, coordination mechanisms,and control schemesnecessary for
integrating heterogeneous units of distributed information systems while meeting such
performancecriteria as overall effectiveness, efficiency, responsiveness,and robustness.
Animportant componentof the methodologyis the coordination amongagents. The
framework is applied to the development of a manufacturing information system for
managingthe production processes for makingprinted circuit boards. Performanceresults
confirm that the multi-agent frameworkfor system integration is important to support
complexbusiness processes that involve multiple steps of activities processed by a group
of agents across a variety of functionalities. Theframeworkalso provides an unified model
for integrating software and decision modulesin complexinformation systems.
- 314-
1. Introduction
Thereare several objectives of systemsintegration, such as the establishmentof
goodcommunication
and coordinationprocedures;promotingcollaboration amonga group
of networkedparticipants, sharing of information amongdifferent entities across an
informationsystem;maintaininga variety of functional modulesto makean information
system flexible and adaptive; efficiently managethe coordination betweendifferent
informationsystemsin an enterprise; and consolidating various business functions in
informationsystemsto makeprocessesmoreefficient. Oneof the crucial issues in system
integrationis the identification of coordinationmechanisms,
the representationof different
roles and functionalities, andthe performance
measures.Theare several dimensionsto the
systemsintegration problem,each with its ownset of objectives (Sikora&Shaw,
1994):
¯ Integration of heterogeneousinformationsystems, data bases, or application
softwareto facilitate the data flowbetweenthemandto makethe overall systemrobust and
efficient.
¯ Integration of different physical stages in business processes to improvethe
internal performance
metrics. For example,informationsystems(’IS) for the integration
the manufacturingand the assemblystages on an manufacturingshop floor to improvethe
coordination betweenthemand to better react to any emergingdemandfrom customer
orders or fromother productgroups.
¯ Integrationof different functionalunits in an organizationto improvethe external
performance
metrics. For example,informationsystemfor the integ,ra, tion of the marketing,
product design, and production functions of an organization to improvethe product
development
life cycle.
¯ Integration of subsystemsinto a well-coordinated, networkedsystem. For
example,informationsystemfor the integration of a networkof suppliers, producers,and
distributors to reducethe inventorybuildupin the networkof suppliers.
In order to effectively deal with the problemof systemintegration in all of the
different dimensionsoutlined aboveweneed a general frameworkthat can be used as a
formalismto representandanalyzethe structure of the enterprise activities involvedand
their interactions. Thecommon
feature of systemintegrationis that it requirescoordination
amongphysically or logically distinct and sometimes
complexprocesses, component
units,
and subsystems.
In this paper we will present a multi-agent frameworkof coordination. Wewill
showhowour frameworkcan be recursively applied to analyze a multi-agent systemat
freer levels of granularity.In other words,eachagentin a multi-agentsystemcanbe further
.215 -
r
decomposed
into sub-agents to analyze its internal workingand this process can be
continuedrecursivelyuntil the primitiveelementsof the systemare reached.
Finally, wediscuss the application of the aboveframework
of coordinationto the
problemof systemintegration in general andpresent a specific application of the above
framework
to a real-worldmanufacturing
problemin a printed circuit boardsfacility. In
conclusionswediscuss someof the other applications in whichthe aboveframework
can
be appliedandpresentdirectionsfor future research.
2. A Framework of Information Systems Coordination
Theessential requirementfor the need of coordinationmechanisms
in information
systemsis the presenceof a collection of agents1 workingtogether to solve the same
problemsimultaneouslyor workingasynehronously
on different parts of the sameproblem
(Crowston[1991]; Shawand Fox [1992]). One of the main reasons the study
coordinationamongdifferent problemsolvers has becomemoreimportantin recent times is
becausethe advancesin hardwaretechnologyfor processorconstructionandinterprocessor
communication
have madeit possible to connect large numbersof sophisticated, yet
inexpensive,processingunits that executeasynehronously.
This makesit possible to build
systemsfor tackling complexproblemswhichhave not been possible before. Maloneand
Crowston(1991) present an interdisciplinary theory of coordination. Belowwegive the
theoretical foundationsthat will help in analyzingthe workingof anymulti-agentsystem.
In analyzinga multi-agentinformationsystemwedefine the workingof the system
basedon a performance
measure,~ (formallydefined later). Thegoal of the systemis to
improvethe performancemeasure.Theagents have their individual performancemeasures,
~. Notethat this characterizationis generalenoughto includewhatis referred to as Open
Systemsin Hewitt(1991),wherethere are no specific goals; rather the systemis composed
of independentlydevelopedparts (or agents) in continuousevolution. Eachagent has its
internal behaviormodelwhichdefines the role of the agent and howit wouldreact to the
changingenvironmentor to messagesreeeivexLThegoal of this interaction amongthe
agents is to improvethe performanceof the systemas a whole.Note, however,that any
multi-agentsystemwherethe agents havespecific sub-goalscan still be capturedin our
framework.Theperformancemeasureof the systemas a wholecan be defmedin terms of
these sub-goals.
1Byagents we meansoftware modules, decision units, or, in general, information subsystems.
- 316-
Wenext present an analytical modelof multi-agentsystemsthat is motivatedby the
workdone on modellingof distributed systems (Chandyand Misra [1986], Halpemand
Fagin[ 1989], Milner[1980])and ActorSystems(Hewitt[1977]).
Anymulti-agent informationsystemcan be analyzedas consisting of individual
agents AGI, AG2,..., AGnand an environment, E. Wedefine the interdependencies
amongthe agentsbasedon the interactionvariables.Theinteraction variable zij gives the
informationfor whichagent AGjis dependenton agent AGi.The interactions amongthe
agents then consists of sendingandreceivingthe interaction variables. Wedefine zi, the
dependency
vector for agent AGi,as a vector givenby
zi - (Zli, z2i, ..., Zni)
Let 7-4 be the set of all possible dependencyvectors for agent AGi. Wedefine the
interdependency
struc~e, Z, as the spacegiven by
Z c ZeXZIX...XZn
Wecharacterizethe workingof sucha multi-agentsystemin termsof the states of
the agents and the activities that they can perform. Wedenote se as the state of the
environment
andsi as the local state of the agent AGi.Thelocal states of the agentsalso
includethe informationaboutthe interaction variables. Theglobal state of the systemis
thendefmed
as the (n+1)-tuple(se, Sl,..., Sn). Let Sebe the set of all possiblestates of
environment
andSi be the set of all possiblelocal states of the agent AGi.Wedefine the
global saw~ureG, given by
G ~ SeXS1X...XSn,
as the set of all possibleglobalstates. Theaboverelationshipis that of a subsetto allowfor
the fact that someof the global states mightnot be possible. Notethat the interdependency
structureis part of the globalstructure.
Wedefine the systemperformance
measure,//7,as a function fromthe global states
to a measurement
in real numbers,i.e.,
/l;:a
>R
Wesay that the performance
measureof the systemimprovesas it movesfromglobal state
gl to globalstate g2ff 7r~(g2)>/r,(gl).
Wedefine ai to be the activity performedby the agent AGi,andae as the activity
performedby the environment
E. Weallow eventheenvironmentto performactivities. For
example, messagesreceived by the agents from the outside world can be modelledas
activities performedby the environment.Since our mainmotivationin developingthis
frameworkis to modelthe workingof a multi-agent informationsystem, interaction and
etx)rdination throughcommunication
activities such as messagepassing will be the most
importantcontrol structure in our framework.Wedefine the basic activity to consist of
- 317-
either sending messages,receiving messages,or internal computation,wheremessages
maybe control signals, data, or coordinationcommands.
In this modelweassumethat the
internal computationsof the agents are not visible to the other agents and hencedo not
affect them;they only changethe local state of the agentperformingthe computation.This
is similar to the concept of "arm’s length relationship" defined in OpenSystems
(Hewitt[1991]).A variety of coordinationmechanisms
are discussedin Chinget al. (1992)
and Shaw& Fox (1993).
Since the agents can workasynchronously and can perform their activities
simultaneously,wedefine the notionof a joint activity as the tuple (ae, al, ..., an). We
define a ftmetion~: that associatesa globalstate transformerwitheveryjoint activity. In
otherwords,~ae, al, ..., an)(g)is the globalstate that results whenthe joint activity (ae,
al, ..., an) is performedon the global state g,: Moresuccinctly, "~(ae, al, ..., an) is
functionfromthe globalstates to globalstates
"v(ae,al, ..., an) : ~ a
Let Aebe the set of all possibleactivities that earl be performed
by the environment,
andlet Ai be the set of possibleactivities that canbe performed
by the agentAGi.Let ,,,1,
definedby
A ~ AeXAIX
...
XAn,
bethesetofjoint
activities
possible.
Asbefore,
A isdefined
asthesubset
ofallpossible
joint
activities
toaccount
forthefact
that
certain
joint
activities
might
notbepossible.
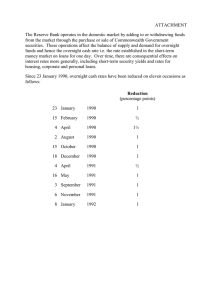
Figure
1 showstheconceptual
model
of an agent.
Eachagent
is modelled
as
consisting
ofthree
important
components.
A knowledge
baseKill,,
a control
unitCUl,
anda functional
component
Fi.Theknowledge
base
ofagent
AGiinturn
consists
ofa list
ofacquaintances,
0~,which
isa finite
collection
ofagents
that
itdirectly
knows
about
together
with
their
skills,
anda case
history
ofthepast
experiences,/-/7
unit
of
i.Thecontrol
theagentAG consists
of protocols
Pt anda learning
module
MLi.Thefunctional
component
consists
ofcomputational
procedures
anda behavior
model.
Anagent
cancommunicate
only
with
those
whoareinitsacquaintance
list.
Thelist
ofacquaintances
models
thecontrol
structure
attheglobal
level.
Wedefine
thecontrol
structure, ’~, as an nxnmatrixsuchthat T[i,j] - 1 if agentAGican communicate
directly
with the agent AGj,i.e., AGjE Oi. Notethat the control structure does not have to be
symmetric.In the abovecase it is possible that agent AGjdoesnot knowaboutagent AGi.
AgentAGjcan still receive messagesfromagent AGiand reply to it withoutknowingabout
the sender of the messages.This is meantto capture the common
type of communication
available in mostcomputerlanguages,i.e, procedureor sub-routinecalling. In procedure
- 318-
calling, the procedurebeingcalled doesnot knowwhichprogramis makingthe call; it can
still returnthe result of its computation
to the caller.
Theprotocols of the agents define howthey respondto the changesin their local
state resulting from an internal computationor froma receipt of a message.Note, the
protocols could be either strategies in a decision makingcontext or algorithms in a
computationalcontext. Wedefine the individual protocols run by the agents as functions
fromtheir local states to their activities. If Pi is the protocolrunbythe agentAGithen
Pi:Si ----) Ai
In other words,eachagent decideswhatto do basedon its local state. This is in
keepingwiththe fact that the agentsdo not havea truly global viewof the systemandtheir
actions dependonly on what they perceive as their immediateenvironmentand on the
messages
received,i.e., their local state.
Wedefine a coordinationmechan/sm,
C, as a joint protocol (Pc, P1, P2, ..., Pn),
where Pi is the protocol run by the agent AGi, and Pe is the protocol run by the
environment.Note that just as it was useful to viewthe environmentas performingan
activity it is also useful to viewthe environment
as rurminga protocol. Wecan use the
environment’s
protocolto capturethe possibilities that messagesmightget lost. Input from
the outside world can also be modelledas messagesfrom the environment. Thus, a
coordinationmechanism
can be viewedas a function fromthe global states to the joint
activities,i.e.,
C:G " A
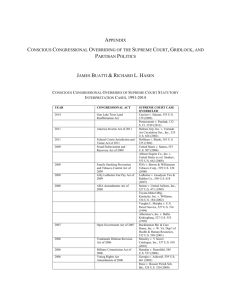
Figure 2 shows different database managementsystems (DBMS)
of a typical
company
comleetedon a networkandillustrates an exampleof the application of the above
frameworkfor integration. It consists of a maincorporate database and departmental
databases (for example,engineering and manufacturing).The corporate database might
haveinformationabout the personnel,metingdata, financial data, etc. Thedepartmental
databases mightcontain informationpertaining to their respective areas. Withineach
departmentthere mightbe local databasescontaininginformationthat is localized to a
specific operation or component.
For example,within manufacturingthere mightbe local
databasesthat contain workassignments,movements
of materials, etc., for the respective
machines.
Basedon our forrn~lismeachDBMS
can be modelledas an agent that has to interact
with the other companyand comte databases for information sharing. The list of
acquaintances, Q, of each DBMS
wouldbe the list of other DBMSs
on the networkwith
whichit can interact. As mentionedabove, the list of acquaintancesmodelsthe control
319 -
structure of the networkof agents. For example,to modelrestricted accessof the corporate
DBMS,
it might be on the list of acquaintancesof the engineering and manufacturing
DBMSs
but not on the local DBMS
within the manufacturingdomain.
Theknowledgebase of each DBMS
wouldconsist of the actual data stored and a
list of acquaintances. The control unit of each DBMS
wouldconsist of protocols for
interacting with the other DBMSs.
For example,it could be basedon a querylanguagelike
SQLto send queries to or handlequeries fromother DBMSs.
Thecontrol unit wouldalso
redirect queries it is unableto handleto the appropriateDBMS.
Thefunctionalcomponent
would consist of various computational procedures needed to extract meaningful
information form the data base. A truth maltanancemechanism(I-Iuhns &Bridgeland,
1991) or the equivalent wouldbe neededto ensure the consistencyof such multi-agent
systems.
Oneof the importantadvantagesof using the aboveframework
is the flexibility it
provides in modellingany multi-agent systemat different levels of granularity. Each
individualagent in a multi-agentsystemcan itself be consideredas a multi-agentsystem
and can be analyzedusing the sameframework.In other words, a systemcan be broken
downand analyzedin successivelyfiner levels of granularity until wereach the atomic
elementsconstitutingthe system.
For instance, an agent AGican be modelledas havingits owninternal environment
Ei and sub-agents AGij, i.e.,
AGi-- {Ei, AGil, AGi2, ...,
AGim).The local state,
si, of
the agentcan be modelledas a tuple consistingof the local states of its sub-agentsandits
internalenvironment,
i.e., s -- (sic, Sil, si2, ..., sire). Anactivity, 9i, of the agentearl
modelled
as the tuple corresponding
to the joint activities of its sub-agents,i.e., al - (aie,
ail, at2, ..., aim).Theset of all activities, Ai, of the agentwouldthenbe sameas the set of
joint activities of its sub-agents,Ai, where
~li ~ Aie X Ail X ...
X Aim
Similarly,the protocol, Pi, of the agentcan be modelledas the joint protocolof its subagents, i.e, Pi ~ (Pie, Pil, Pi2 ..... Pim).
Thus,wesee that the aboveframework
lends itself easily to analyzinga multi-agent
systemat multiple levels of granularity recursively. For example,at the top level an
organizationinformationsystemcan be analyzedas a multi-agentsystemwherethe agents
correspondto the informationsystemsof different functional departmentslike finance,
marketing,manufacturing,etc. Eachof these departmentalinformationsystemscan in turn
be analyzedin terms of its different divisions of tasks and missions dependingon the
structure andstrategies of the organization.For example,the workingof the manufacturing
departmentinformation systemcan be analyzedin terms of the interactions amongthe
;- 320-
informationsystemsof its different activities suchas design, facility layout, planning,
processing,materialhandling,quality control, etc.
Agentcoordinationandtask allocation havebeenstudied by researchin distributed
artificial intelligence (Gasserand Huhns[1989]; Durfeeand Lesser[1989];Derfeeet al.
[1989]; Adler et al. [1992]). A related framework
for understandinglarge-scale systems
has beenthe development
of the Actorand OpenSystems(I-Iewitt [1977,1991]).Thebasic
conceptunderlyingthese systemsis that, rather than viewinga control structure as a
sequenceof choicesmadeby a single decisionmakerin a spaceof choicepoints, it could
instead be seen as a pattern of messagespassing amonga collection of computational
agentscalled "actors." Themainfeaturesof the Actormodelare (1) the ability for a society
of experts or actors to achieveintelligent behavior;, (2) a theory of computationthat
supportsfree-grainedandnaturallyconcurrentcomputation;
(3) controlstructures as patters
of messagesrather than a sequential choice amongalternatives; and (4) nonserialized
actors, as opposedto serialized actors, havinga local state that persists on reinvoeation.
TheOpenSystemmodel,on the other hand, formaliTesthe characteristics of information
systemscomposedof independentlydevelopedunits in continuousevolution. Takinga
moresystem-levelviewpoint,the modelconsider informationsystemswith concurrentand
asynchronous
processes. Coordinationis this type of informationsystemscan be basedon
such mechanisms
as debateandnegotiation (Holsappleet al., 1991;Sycara[1989]). Wemer
(1989)developesa theory of communication
for cooperatingagents.
3. Application of the Agent-Based Frameworkto System Integration
Thecommon
feature of systemintegration is that it requires coordinationamong
physically or logically distinct andsometimes
complexprocessesor systems.Accordingto
Mize(1991),there havebeentwo traditional approachesof doingsystemintegration in the
past. First is the "islands of automation"
approachin whichrealistically sized modulesare
first build independentlyand are then linked together into an integrated system. The
drawback
of this approachis that it results in only interfacing, not integration. In other
words,the effects of other modulesare not takeninto accountin the designandworkingof
a module.The secondapproachis to start at the top and design a comprehensive
system
fromthe verybeginning.Thedrawbackof
this approachis that it is not adaptiveto frequent
systemor environmentalchanges.Whatis neededis a combinationof the two approaches
that can exploit the advantagesof the bothwithoutincorlxratingtheir drawbacks.
Theagent-basedframeworkpresented in this paper earl be thought of as such a
hybrid approach.Onone handa general framework
for the total systemcan be specified,
- 321-
on the other hand the modulescan be individually implementedwithin the overall
framework.
Agentsare the basic entities in an agent-basedsystem.For example,they earl
be either stand-aloneprocessorsinterconnectedon a networkor heterogeneouscomponents
of a system.Associatedwith everyagentis a set of proceduresandfunctionsthat defmethe
meaningfuloperationsof that agent and howit interacts with the other agents. Fromthe
designperspective,agentsmodelthe entities in the applicationdomain.Forexample,ff the
system under consideration is an organization, the agents can modelthe different
departments within the organization. Thus, the agent-based approach provides an
"architectural framework"
for systemintegration.
Thetraditional approachof managing
a systemutilize8 functionaldecomposition
to
specify the tasks to be completedby eachcomponent
of the system.In contrast, the agentbased approachemphasizesthe importanceof information and control by utilizing the
relationshipsandinterdependencies
betweenthe agentsas a fundamental
part of the system.
This point of viewis shared by recent research in agent-basedsystems~ et al.[1993])
and networkorganizations(Citing et al.[1993]).:Thus,the designof the informationand
control systemresulting fromusing an agent-basedapproachrepresentsa tighter coupling
of data andfunctionality(or behavior).It is bothnaturalandflexible. It is natural in the
sense that the agents are closelyidentified withthe real-worldelementsor conceptswhich
they model.It is flexible in the sense of quickly adapting to changesin the problem
specifications. Themainadvantagesoffered by the agent-basedapproachare uniformity,
modularity,andreconfigurability.
In a fundamentalway,a parallel can be drawnbetweenthe, proposedagent-based
framework
for systemintegration andthe object-oriented modelfor softwaredevelopment
(Kamel&Syned[1989];Korson&McGregor[1990]; Pan&Tenenbaum[1991 ]). Both
frameworksemphasizethe modularityof the approachin whichthe basic elementof the
system is the same(objects in object-oriented approachand agents in agent-based
approach).Theuniformitynot only providesthe agent-basedapproachthe portability and
the ease of reuse (as in the object-orientedapproach),but it also providesthe keylinkage
for integrationof a system.
In order to applyour multi-agentframework
to systemintegration weftrst needto
define whatthe agents represent. Theimportantconceptin the application of our multiagent framework
to systemintegration wouldbe the encapsulationof the different entities
or processesinvolvedinto their behaviormodels.The behaviormodelsare computational
processesthat earl mimicthe activities of the corresponding
entities(Ferber&Carle[1991
]).
For example,a simulationmodelcan be thoughtof as a behaviormodel.
Wedefine an agentcorresponding
to eachentity as a decisionnodeconsistingof
- 322-
¯ a functional component
that in tumconsists of the behaviormodelof the entity
and computationalprocedures;
¯ a knowledge
base whichconsists of a list of the agent’s acquaintancesalongwith
their skills andcasesrelatedto its past experience;
¯ a control unit whichconsists of communication
protocols that specify howthe
agent wouldreact, in responseto the messagesreceived, as a function of the state of its
local state and a learning modulewhichmodifies the knowledgebase based on its
interactionwith otheragentsandits currentperformance.
Theresulting integratedinformationsystemcan thus be thoughtof as a collectionof
agents - software modules,information subsystems,data bases, and decision units cormeetedtogether via a communication
network,sharing and exchanginginformation.
This informationprocessingperspectivealso underscoresthe fact that the advantagesof
distributed processing,namelyreliability andeasy acce~of information,can be broughtto
bear uponthe integratedsystem.It also supportsthe viewthat the keyin achievingsystem
integration is coordination through the use of appropriate levels of computersand
information/communication technologies (Mize[1991]; Roboam&Fox[1990]).
More
importantly,it providesa meansfor coordinationof the activities of the agentsas well as
integration of the heterogeneous
components
of a system.
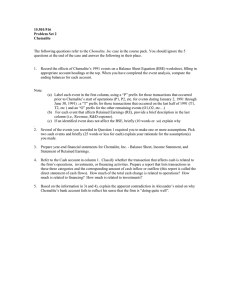
Figure 3 showsa general representation of the application of the multi-agent
framework
to systemintegration. For example,the entities can be the different computerbased machinesin a shop floor that have to be integrated. The physical links would
etxrestxmdto the materialhandlingsystemthat interconnectsthe isl~ds. Theapplicationof
the multi-agentframework
for integrating the workingof the islands of automationwould
then involvecreating the agents correspondingto each island of automationandenabling
themto interact andcontrol the entities. Notethat the agents do not necessarilyhaveto
correspondto physical entities (for e.g., AgentA in figure 3). Theycould be logical
decisionmodules
whichalso haveto be integratedwith the workingof the physicalentities.
In other words, systemintegration not only pertains to integrating the activities of
physically distinct stages or processesbut also includes the coordinationof logically
separate decision modules.Eachagent can in turn be analyzedwithin the multi-agent
framework
as consistingof sub-agents(for e.g., Agent4 in figure 3).
4. Information
Systems Integration
Manufacturing Environment
in a Printed
323-
Circuit
Boards
In this
coordination in
integration in
Printed Circuit
section we present an example of applying the above framework of
the manufacturingdomain.Specifically, we look at the problemof system
a real world Surface MountTechnology (SMT)plant for manufacturing
Boards (PCB). Weanalyze the coordination problems amongthe various
componentsof the systemat four different levels of granularity. Thepurpose is to ensure
that the individual IS and decision modulesact to meet global system objectives in a
disa’ibuted fashion.
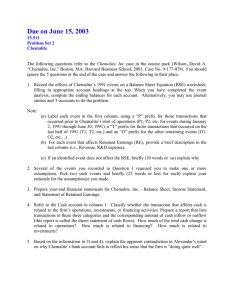
Figure 4 shows the schematic of the PCBmanufacturing environment under
consideration. It consist of surface mounttechnology (SMT)based assembly lines where
the placement of the componentson the PCBboards takes place. The facility consists of
four such assemblylines and thus has considerable flexibility. The four lines together
constitute the so-called Feederstage of the facility. Thefacility is designedto produce18
different types of PCBboards. Each SMTline consists of screen printers for maskingand
attaching solder on the bare PCBs, three types of automated component placement
machines (Fuji, Zevatech, and automated robots), PROM
programmers, manual assembly
stations (for placement of componentstoo large for the machines to handle), infrared
ovens, and automatedand manualtest stations.
After leaving the SMTlines the boards go through a cleaning station. At this point
the boards are ready to be processed by the Final Inspection and Testing (FIT) stage of the
facility wherethe boardsarc assembledinto the final products. It consists of tin’ee FITlines
that are operated manually. One of the main issues concerning this facility is the
coordination betweenthe two stages so that the production of boar~ that go into the same
productis coordinated.Thecurrent practice at the facility is to de-conpleboth the stages by
havinga very large buffer capacity betweenthem.
The machines in the feeder stage arc connected by conveyors which can hold at
most twoboards at a time. Thus, one of the importantcharacteristics of the SMTlines to be
considered whenmaking scheduling decisions is the limited amountof buffer capacity
available betweenthe machines. Bar code readers are used to scan each board to determine
board type. Bar code information is used to change programs for the chip placement
machines, robots, ovens, and PROM
progrmmuerfor each batch of PCB’s without human
intervention. Also, the set of componentsin the chip placement machines have to be
changedwhenevera different kind of PCBboards have to be processed by the machines.
Thetime required to change the set of componentsin a placementmachine,before the PCB
boards can be processed by that machine,is called the set-up time. Since these changesin
the machines are done manually and require considerable skill, the set-up times are
significant as compared to the processing times of the PCBboards on the machines.
- 324-
Normally,the different kinds of PCBboards require components
someof whichare also
needed by the other PCBboards. Therefore, thetime required to set a machinefor
processing a kind of PCBboard usually dependson the kind of the PCBboard that was
processedpreviously on the machine.In other words,the set-up times on the machines
dependon the sequencein whichthe different kinds of PCBboards are processed. Thus,
the other important characteristic of the SMT
line to be considered while makingthe
schedulingdecisionsis the sequencedependence
of the set-up times, whichusually dictate
the performance
of the overall system.
Thereare manyfactors in this environment
that motivatethe use of our multi-agent
framework
for integratiou. Thereare different stages in the manufacturing
processthat have
their ownobjectives andare the responsibility of different managers.However,
there are
manyinterdependeneiesamongthe stages and ignoring themby trying to optimize each
individual stage separately leads to a sub-optimalsystemperformance.For example,the
assemblystage and the feeder stage have their ownobjectives of minimizingthe through
put time andreducingthe inventorieslevel, but are interdependentbecauseof the flowof
productsfromone stage to another. Evenwithin one stage there are different information
systems or decision modulesthat have their ownwell-def’med functions but are
interdependent on each other for information. For example,in the feeder stage the
information system responsible for scheduling each flow line is dependent on the
information about the schedule of other flow lines primarily because of the complex
productstructures requiring parts of the sameproduct being manufacturedon different
lines. Similarly,the informationsystemfor eachof the flowlines it.ll consistsof different
decisionmodulesthat needto be integrated. For example,the lot-sizing, sequencing,and
capacityplanningmodules
haveto interact in order to constructa feasible schedulefor the
flowline. All these factors motivatethe use of our framework
for integration as it allows
the underlyinginformationsystemto retain its distributed nature at the sameprovidingit
withthe meansfor achievingthe desired coordinationandintegration.
The maingoal of this research is to modelthe complexinformation flows and
decisionprocessesinvolvedin the’manufacturing
exampledescribedearlier andto develop
coordination mechanisms
that earl makethe systemmoreefficient and effective. The
important issue in developing the coordination mechanismsis howto maintain the
distributed control of the entities involved,at the sametime providingthemwith meansof
informationexchange
to achieveefficient integrationof the processes.
Figure5 presents the informationinfrastructure for the manufacturing
environment
discussed above and shows various software modulesand databases that have to be
integrated. For example,basedon the customerorders for the final products, the product
.325-
structure information,andthe parts alreadyin stock, the materialresourceplanning(MRP)
modulehas to updatethe daily part demand
informationandinteract with the short interval
scheduler(SIS) to set realistic duedates for the final products.TheSIS, in turn, has
interact with modulesfor lotsizing, sequencing,capacity planning,andsimulationto find
the daily schedules.Basedon the informationaboutthe daily schedules,the dispatching
rules, and the current machineandinventorylevel status, the dynamicschedulerinforms
the towline controllers of the actual dispatching schedule on a continuousbasis. The
controllers also updatethe machine
andinventorystatus databasefromtime to time.
Oneof the maindifficulties in coordinatingthe aboveactivities is that there is no
central control or authority overlookingthe entire operation. That is, the underlying
informationsystemis distributed. Asa result, the various objects, modules,andprocesses
need to coordinate with each other. In practice, for example,the MRP
managerwould
constantly negotiate with the schedulingmanagerto decide the due-date committedto a
customer’s order. This type of coordination earl be supported by a eomputerized
negotiationsupportsystem(I-Iosappleet al., 1991)or conflict resolution(Klein[1991
]).
our approach,the multi-agentframework
providesan excellent alternative as it allowsfor
the different modules,objects, or processes--i.e., agents- to maintaintheir local control
by treating themas autonomous
agents, at the sametime providingthemwith a meansfor
achievingthe desired coordination.
Onthe logical level, westudy the integration of the different modulesfor the
workingof the short interval scheduler.Theproblemof finding a schedulefor a flowline
with sequencedependantsetup times has been dealt with extensivelyin the productionand
operationsresearch, literature and has beenshownto belongto a class of problemscalled
NP-hard(Bahl and Ritzman[1984]).Several approaches that treat the problemas
optimizationproblemhave been suggested(e.g., Manne[1958]),
but they all suffer from
the drawbackthat they do not scale up to the real-world problems.As a result several
heuristic approachesthat decomposethe scheduling probleminto two sub-problemsof
lotsizing and sequencingand treat themas independentsub-problemshave been proposed
(Baldet al [1987]; Elmaghraby
[1989]). In reality, however,these twosub-problems,
i.e.,
lotsizing andsequencing,are not independentof eachother. For a morerealistic solution
we need an approach or a methodologythat, while treating the two sub-problems
separately, has the additional capability for integrating the solution processof the two
subproblems.In other words,weneed an approachthat takes an informationperspectiveof
the problemby highlighting the need for information sharing required betweenthe two
processes. Themulti-agent frameworkprovides such an approach.It allows us to model
the deeision modulesfor solving the two subproblemsas different agents (or modules),
while at the sametime providing themwith a meansof interacting with each other and
coordinatingtheir actionswhilebuildingtheir solutionsincrementally.
Weapply the multi-agentframework
of Systemintegration to this exampleby first
analyzingthe systemin tenmof its components
(or agents) and their interdependeneies
and
developingindividualprotocolsfor the agents that wouldresult in a coherentbehaviorof
the system. To reiterate, the single flow line schedulingproblemis to find the weekly
scheduleof productionthat meetsthe daily demand,satisfies the capacity constraints,
minimizesthe costs andimprovesthe productivity. Theweeklyscheduleconsists of daily
lot-sizes and their sequence.Thus, wehave two maindecision modulesof lot-sizing and
sequencingin our controller, anda capacityplanningmodulewhichprovidesthe evaluation
of a schedule.Below,wegive the detailed analysis of the schedulingsystembased on our
multi-agent framework.
Animportantissue related to systemintegration is the integration of different
softwaremodulesworkingon either different parts of the sameproblemor different but
interdependentproblems.Thesystemdevelopedhas one super class, called Scheduler,and
twosub-classes, called FlowlineandFactory,as shownin figure 9. TheFlowlineclass, as
the nameimplies, containsthe detailed informationabouta towline(like processingtimes,
setup times, etc.) together with functions neededto do lotsizing and sequencing.The
Factoryclass has informationaboutthe factory (for example,objects of the Flowlineclass
correspondingto the numberof towlines in the factory, informationabout the product
mix, the demandat the productlevel, the line of whicheach board is to be made,etc.)
together with the functions for coordinatingthe productionschedulesof the individual
lines. TheSchedulerClassis essentially an abstract class createdto containthe functions
that are common
to both the Flowlineand the FactoryClasses (for example.,finding the
best productto schedulebasedon their utilities, schedulingthe productionfor a day, etc.)
Thecoordinationamongthe modulesis doneat two levels. At the first level the
FactoryClassdoesthe lot-sizing at the productlevel by finding the utilities of producing
eachproductand schedulingthe productwith the best utility for production.In order to
fmdthe utility for a productit sendsa messagerequestingthe utility of producingeachof
the constituent boardsto the FlowlineObjectconespondingto the towline on whichthe
boardis made.In other words,the utility of producinga productis calculatedbasedon the
utilities of producingthe individualboardsgoinginto that product.Atthe secondlevel, the
control is passed to the individual FlowlineObjectsfor coordinatingtheir production
schedules. EachFlowlineObject does the schedulingconcurrently. Thecoordinationand
message-passing
amongthe Flowlineobjects is achievedby using "shared data structures"
(Leeet al.[1993]).
- 327-
J
5. Implementation and Performance Evaluation
In this section wepresent a summary
of the results and performance
evaluationof
the implementationdiscussed above. To evaluate the impact of integration and the
effectivenessof coordinationon the fast level, experiments
wereconductedto evaluatethe
integration of the three decisionmodulesof lot-sizing, sequencing,andcapacity planning
as explainedin section 4. Thelevel of work-in-process,needof overtime,and the cycletime of the processare usedas measuresof the processefficiency. Theintegration of the
three modulesis essential as eachmoduleis designedfor a specific functionanduses only
a specific criteria. Thegenerationof a schedulefor the towline,on the otherhand,requires
someformof integration of the multiple objectives and functions. For example,the lotsizing moduledeterminesthe lot sizes to be producedeachday andonly tries to minimize
the total costs associatedwithit. Thesequencing
moduletries to find the best sequencefor
each day that minimizesthe total cycle time (or makespan).However,whatis neededis
schedulethat not only meetsthe abovetwoobjectivesof minimizing
the total costs andthe
makespan
but also minimizesthe amountof overtimeused. In other words,the integration
of the modulesis expectedto be morethan just the sumof the individual modules.An
information system methodology
emphasizingsystem-wideintegration and coordination
provides the global perspective seeking overall performancegoals rather than the
performancesof individual components.
Todemonstratethis feature, a numberof experimentswerecarried out to study the
behaviorof the systemperformanceas a function of the interactions amongthe modules
andthe results are presentedin Figures11 and12. Theresults at nointeractionsin the plot
correspondto the results given by the individual modulesfunctioning independently
withoutanyintegration. Ashypothesized
earlier, the integration of the modulesleads to a
significant improvement
in all the three performance
measures.All the results are averaged
overfive trials. At the secondlevel, experiments
werecarriedout to evaluatethe integration
of the software modulescorrespondingto each of the four flowlines in the factory as
explainedin section 5. Again,the integration and coordinationof the softwaremodulesof
the different flowlines is importantbecauseof the needto coordinatethe productionof the
board units madeon different lines but going into the samefmal product. A lack of
coordinationamongthe modulesleads to the workin process (WIP)inventorybuildup.
The object-oriented systemdescribed in section 5 was tested on five different
problemsconsisting of four towlines, ten products, and twelvetypes of circuit boards.
Eachtowlinemadethree different boards. Thecriteria used for evaluationwerethe total
328-
cycle time of the four lines combinedand the WIPinventory build up in terms of the
numberof board-days.Table 1 showsthe results of integrating the modulestogether with
that of using the different modulesindependently
withoutanycoordinationandintegration.
Theresults are averagedover the five problems.Theresults showthat both the total cycletime and inventory build-up due to lack of coordination are reducedby a significant
amount.Theseresults clearly demonstratethe benefits of integrating andcoordinatingthe
working of various decision and software modulesin an information syste m. They
illustrate the efficacyof systemsintegration. Theseresults also conftrmthat the conceptof
systemintegration is especially importantfor supportingbusinessprocessessuchas the
onewehavein the printed circuit boardmanufacturing
system.
In general, the performance
results fromthe experimentsconfirmthat information
systemscan be the enabler of improvedbusiness processes involving multiple steps of
activities, processedby a numberof agents (Davenport,1990; Hammer,
1990). Process
parameterssuchas work-in-process,needof additional overtime,andthe cycle-timeof the
processare all measuresof the processefficiency. As shownby the experimentalresults,
the systemintegration approachenforces the coordinationamongthe agents as well as
amongthe subprocesses.As a result, both the cycle-timeand work-in-processinventory
are reduced.
6. Conclusions
In this paper wehavepresenteda general multi-agentframework
for coordinating
and integrating a collection of stand alone units, each of whichcan be viewedas an
"agent." Themainadvantagesof using the aboveframework
are: (1) it providesuniformity
of a general framework
for the total systemby treating the heterogeneous
components
in a
homogeneous
fashion, (2) it provides modularity by allowing different modulesto
individuallydevelopedand implemented,
(3) it providesthe capability to reconfigurethe
systemeasily, and(4) it providesfor distributedcontrolby allowingthe "agents"to retain
their local control at the sametimeprovidingthemwiththe capability for interacting and
coordinatingtheir activities throughmessage-passing.
Wepresented a real world exampleof a manufacturingenvironmentand showed
howthe aboveframework
can be applied for integrating not only different decision and
softwaremodulesbut also integrating physically distinct stages of a system.Oneof the
mostimportant applications of the frameworkpresented here can be the integration of
various heterogeneouscomponents,data bases or softwaresystems, at the organizational
level.
- 329-
i
References
ADLER,M., DURFEE,
E., HUHNS,
M., PUNCH,W., ANDSIMOUDIS,
"AAAIWorkshopon
Cooperation AmongHeterogeneousIntelligent.s,",41 Magazine, Summer,1992.
BAlm,H.C. ANDRrrZMAN,
LJ’., "A Cyclical SchedulingHeuristic for Lot Sizing with
CapacityConstraints," Intl. Journal of Prod. Res., vol. 22, no. 5, pp. 791-800,
1984.
BAHL,H. C., RITZMAN,
L. P., ANDGUPTA,
J. N. D., "DeterminingLot Sizes and Resource
Requirements: A Review," Operations Research, Vol. 35, No. 3, May-June1987,
pp. 329-345.
CHANDY,
K. M.ANDMISRA,
J., "HowPl’ocesses I..~al~," Distributed Computing,1: 40-52,
1986.
CHING,C., HOLSAPPLE,
C.W., ANDWHINSTONS,
A. B.. "Reputation, l.e.arning, and
Coordination in Distributed Decision MakingContexts," OrganizationScience
Vol. 3, No. 2, pp. 275-297, 1992.
CONRY,
S., KUWABARA,
K., LESSF.R,V., ANDMEYER.
R., "Multistage Negotiation for
Distributed Constraints Satisfaction," IEEETransactions on Systems, Man,and
Cy., V.21, N. 6, 1991, pp.1462-1477.
CROWSTON,
K., "A Topologyog Organizational Coordination Methods," Working
Paper, Sloan School of Management,MIT, 1991.
DAVENPORT,
T.H. ANDSHORT,
J.E., ’~[’he NewIndustrial Engineering: Information
Technology and Business Process Redesign," Sloan ManagementReview,
Summer1990.
DURFEE,
E. & LESSER,V., "Negotiating Task ~mposition and Allocation Using Partial
GlobalPLanning,"in Distributed Artificial Intelligence, VoLII, L. Gasser, and M.
Huhns(F_As), Pitman, London, 1989, pp.229 -244.
DURFEE,
E., LESSER,
V., and CORKILL,
D. "Cooperative, Distributed ProblemSolving," in
The Handbookof Artificial InteUigenci,, VoL/V, A. Barr, P. Cohen, and E.
Feigenbaum(Fxls),Reading, PA: Addison Wesley, 1989, pp. 83-147.
FJJMAGHR.ABY,
SALAHE., "O11Heuristics and their PerformanceEvaluation for Dynamic
Lot Sizing," Management
Science, vo126, No. 1, 1989, pp. 1-10.
FERBER,
J. ANDCARTE,
P., "Actors and Agentsas Reflective ConcurrentObjects: A
Meting IV Perspective," IEEETransactions on Systems, Man, and Cy., V.21, N.
6, 1991, pp.1420-1408.
,- 330-
GASSER,
L. ANDHUHNS,
M., ’Themesin Distributed Artificial Inteeligence Research," in
Distributed Artificial Intelligence, Vol. II, L. Gasser, and M.Huhns(Eds), Pitman,
London, 1989, pp.259-290.
HAMMER,
M., ’!Reengineering Work:Don’t Automate, Obliterate," HarvardBusiness
Review, July/August, 1990.
HALPERN,J. Y. ANDFAOIN, R., "ModellingKnowledgeand Action in Distributed
Systems," Distributed Computing,3: 159-177, 1989.
HEWlTT,
C., "ViewingControl Structures as Patterns of MessagePassing," Journal of
Artificial Intelligence, 8(3), pp.323-364,1977.
HEwrrr,c., "OpenInformation SystemsSemanticsfor Distributed Artificial Intelligence,"
Artificial Intelligence, 47, pp.79-106,1991.
"Negotiation Support Systems: Roots,
Progress, and Needs," Journal of Information @stems,Vol. 1, No. 4, 1991.
HOLSAPPLE,C.W., LAI, H., ANDWHINSTON,A.B.,
UHNS,M. ANDBRIIX3ELAND,
"Multiagent Truth maintenance," IEEETransactions on
Systems, Man, and Cy., V.21, N. 6, 1991, pp.1437-1445.
KAlvWJ~,
M. ANDSYNED,
A., "An Object-Oriented Multiple Agent Planning Systems," in
DistributedArttficial Intelligence, Vol. II, L. Gasser, and M. Huhns(Eds), Pitman,
London, 1989, pp.259-290.
KLEIN,M., "Supporting Conflict Resolution in Cooperative Design Systems," IEEE
Transactions on Systems, Man, and Cy., V.21, N. 6, 1991, pp.1379-1390.
KORSON,
T. ANDMa3REGOR,
J.D., "Understanding Object-Oriented: A Unifying
Paradigm," Communicationsof the ACM,Vol. 33, No. 9, p,p 40-60, 1990.
!.~, K-C, W. MANSFmLD,
ANDA. SHETH,"A Frameworkfor Controlling Cooperative
Agents," IEEEComputer, pp. 8-16, July 1993.
MALONE,T. W. ANDCROWSTON,
IC, Wroward an Interdisciplinary Theory of
Coordination," Technical report, CCSTR#120, SS wp# 3294-91-MSA,M1T,
Cambridge, MA., 1991.
MANNE,
A.S., ’q:’rogrammingof EconomicLot Sizes," Management
Science, Vol. 4, No.
2, pp.125-135, 1958.
’ "
MILNER,
R.,A Calculus of CommunicatingSystems, (Lect Not ComputSci, vo192)
Springer, Berlin Heidelberg NewYork, 1980.
MIZE, J.H., I-LC. BHUSKUTE,
D.B. PRATI’, ANDM. KAMATH,
"Modelingof Integrated
ManufacturingSystems Using an Object-Oriented Approach," liE Transactions on
Design and Manufacturing, Vol. 24, No. 3, pp.14-26, July 1992.
- 331-
MIZE,J. H., "Fundamentalsof Integrated Manufacturing,"in J. Mize(Ed.), Guideto
Systems Integration, Industrial Engineeringand Management
Press, Institute of
Industrial Engineers, Norcross, Georgia, pp. 27-43, 1991.
Intelligent Frameworkfor Enterprise Integration," IEEE
Transactions on Systems, Man, and Cy., V.21, N. 6, 1991, pp.1391-1408.
PAN, J. ANDTENENBAUM,
J., "All
ROBOAM,
M. ANDFOX,M_., ’rl’he Enterprise management
NetworkArchitecture: A PLat for
Multi-Agent ManufacturingSystems," WorkingPaper, Robotics Institute,
Carnegie MellonUniversity, 1990.
SK.vm~KA. ANDMEAL,
H.C., "A Heuristic Selecting Lot Size Requirementfor the ease of
a Deterministic TimeVaryingDemandRate and Discrete Opportunities for
Replenishment," Production and Inventory Management,14, 1973, pp.64-74.
~ FOX,’~Distributed Artificial Intelligence for GroupDecisionSupport,"
SHAW,~J. AND
Decision Support Systems, Vol. 9, pp. 349-367, 1993.
SHAW, M.J., SOLBERG,J., ANDWOO,T., "SystemIntegration for Intelligent Manufacturing:
AnIntroduction," lie Transactions on Design and Manufacturing,Vol. 24, No. 3,
pp. 2-6, July 1992.
Adaptation in Distributed Artificial
Intelligence Systems,"in Distributed Artificial Intelligence, VoLII, L. Gasser, and
M. Huhns (Eds), Pitman, London, 1989, pp.259-290.
$IKORA,
R. ANDSHAW,
M., "A Multiagent Frameworkfor The coordination and Integration
of Information Systems," BeckmanInstitute Technical Report AI-DSS-94-01,
University of Illinois, Urbana, ILL, 1994.
SHAW, M./. ANDWHINSTON,/k.,’T~aming and
WERNER,
E., "Cooperating Agents: A Unified Theory of Communicationand Social
Structure," in Distributed Artificial Intelligence, VoLII, L. Gasser, and M.Huhns
(Eds), Pitman, London, 1989, pp.3-36.
SYCARA,
K., "Multiagent Compromise
via Negotiation," in Distributed Artificial
Intelligence, Vol. II, L. Gasser, and M. Huhns(Eds), Pitman, London,1989,
pp.119 -138.
’- 332-
agents
.~crIntcractions
with
Protocols
Andtheir flcills
And dRt~
Computational[
I
KnowledgeBase
Behavior
Model
"Control
Unit
Functional Component
Figure 1. Conceptual Modelof an Agent
Figure 2. An Example
Application
in Database
Management
- 333 -
i
Agent
Agent2
physical
link~
Entity
3
Agent
Agent41
Figure 3. Multi-Agent Frameworkfor System Integration
- 334-
!
Bare PCB
Solder Paste
[ [[
T T T
Screen
Plmthlg I
Printed Circuits Boards
Fuji 1 Chip
Placement
Machine
Fuji 2 Chip
Placement
Machine
Manual
ln,peetion
Station
Au~ic
Inspection
Station
ZevateehChip
Placement
Machine
#
Buffersfor
Chip Placement
Robot and PROM
Progrannner
Manual
Assembly
¯ StationI
Manual
Assembly
Station1
¼
Solvent
Cleaner
Bath
Oven
Legend
.............. SMT-based
assemblyline (Feeder)
......
Final Inspection and
Testing(FrO
Conveyors
Hgure 4. The Schematic of flae SMTEnvironment
- 335-
Parts in
Stock
Product
Structure
Inform~aon
Manufaettaing
Environment
Customer/Sales
Orders
Part
Demand
Information
Daily
Schedules
seneauling/
Dispatching
Rulebase
I
Maehine./WIP
Status
Legend:
i~ Database
S/Wmodules
1
Figure 5. Information Infrastructure for Factory Integration
- 336-,
~O(i.
c.)
(s pot-sizes]AG2)
Figure
6. State Diagramfor the Workingof AgentAG1
(r Dot-sizes] AG1) Ready
Idle
~.~
....
/ W~ (r
(i_
2 e.
[makespan]
Figure 7. State Diagramfor the Workingof AgentAG2
[sequence]
~
,
AG2~
(L c.)
(s[makespan]AG2)
Figure 8. State Diagramfor the Workingof AgentAG3
- 337
SchedulerClass
Private:
int crnt..day;
Public:
Staticint prod_mixrlg,
prod_s~D;
int no_of..jobs,prodFI
FI;
virtualfloat get_ufilityO
- O;
virtual void produceO
- O;
int schcduleO;
Private:
Private:
Jnt no_of_prods,no_of_mchns,
buffer[];
float dly_capaciw,makcspan~,proc[-JD,
holdingl-l,setupD
[-J [];
flowline*lines[];
int on_lineD
Static int WIDD;
float get_utility0;
void produce0;
float get_.makcspanO;
void get_sequenceO;
void update_WIDO;
Public:
void no_eoord0;
void eoord_scheme_l
0;
void coord_scheme._20;
void ,cogrd_seheme_30;
Public:
q
fleet get..utUityO;
void produceO;
Factory Class
FlowlineClass
Figure 9. Class Structure of the ObjectOrientedSystem
- 338 -
FactoryScheduler
Figure10. ApplicationInstance of the Object-Oriented
System
3900
5600
3800
-=- total makespan
-e- total cost
¯ 8700 ~o
5400
~500
5200
’ 34O0
5000
’
0
2
4
6
8
# ~ intcracticm
10
3300
12
Figure 11. Improvement
in the Makespan
and the Total Cost as a Functionof
the Number
of Interactions
- 339-
5800
-800
,5600
’ 600
-B- total makeepan
-e- total overtime
_*2
54oo
400 ,~
5200
200
5O00
0
2
4
6
8
10
0
12
# of intcractic=s
Figure 12. Improvementin the Makespanand the Total Overtime as a
Function of the Numberof Interactions
Method
w/o Coordination
with Coordination
Make,span
5950.13rain.
5996.37rain.
Board-Days
535
84
Table 1. Improvement in Performance Due to Coordination
- 340-