From: AAAI Technical Report WS-94-02. Compilation copyright © 1994, AAAI (www.aaai.org). All rights reserved.
Designinga Familyof CoordinationAlgorithms*
KeithS. DeckerandVictorR. Lesser
Department
of Computer
Science
Universityof Massachusetts,Amherst,MA01003
Email:
DECKER@CS.UMASS.EDU
May27,1994
Abstract
Manyresearchers haveshownthat there is no single best organizationor coordination
mechanism
for all environments.This paper discusses the design and implementationof an
extendablefamily of coordinationmechanisms,
called GeneralizedPartial GlobalPlanning
(GPGP),that form a basic set of coordination mechanismsfor teams of cooperative
computationalagents. Theimportant features of this approachinclude a set of modular
coordinationmechanisms
(any subset or all of whichcan be used in responseto a particular
task environment);a general specification of these mechanisms
involving the detection
andresponseto certain abstract coordinationrelationships in the incomingtask structure
that are not tied to a particular domain;and a separation of the coordinationmechanisms
from an agent’s local scheduler that allows each to better do the job for whichit was
designed. Wewill also discuss the interactions between these mechanismsand howto
decide wheneach mechanismshould be used, drawingdata from simulation experiments
of multiple agent teamsworkingin abstract task environments.
1
Introduction
This paper presents a formal description of the Generalized Partial Global Planning (GPGP)
coordination approach [6] and extends it to create a family of coordination algorithms that can
be adapted to different environments. The GPGPfamily of algorithms is based on recognizing
and reacting to the characteristics of certain coordination relationships, an approach shared
with VonMartial’s work on the favor relationship [23]. The approach described here is based
on modular components (called ’mechanisms’) that work in conjunction with, but do not
replace, a fully functional agent with a local scheduler. Each componentor mechanismcan be
added as required in reaction to the environment in which the agents find themselves a part.
*This work was supported by DARPA
contract N00014-92-J-1698,Office of Naval Researchcontract
N00014-92-J-1450,
and NSFcontract CDA8922572.The content of the information does not necessarily
reflect the positionor the policyof the Government
andno official endorsement
shouldbe inferred.
- 32-
Anindividual algorithmin the family is defined by a particular set of active mechanisms
and
their associatedparameters.
This paper will also summarize
experimentalresults that involve a completeimplementation
of GPGP
and a separately developedreal-time local scheduler [16, 15]. Wewill showhowto
decide whena particular mechanism
is useful, howsomefamily membersperformrelative to a
centralized algorithm,and whatthe spaceof possible coordinationalgorithmslooks like for the
five mechanisms
currently defined. Weanalyze the performanceof this family of algorithms
through simulation in conjunction with the heuristic real-time local scheduler and randomly
generated abstract task environments.In these environments,the agents attempt to maximize
the system-wide
total utility (a quantity called ’quality’, describedlater) by executingsequences
of interrelated ’methods’. The agents do not initially have a completeview of the problem
solving situation, and the executionof a methodat one agent can either positively or negatively
affect the executionof other methodsat other agents.
TheGPGP
approachspecifies three basic areas of the agent’s coordination behavior: how
and whento communicateand construct non-local views of the current problem solving
situation; howand whento exchangethe partial results of problemsolving; howand whento
makeand break commitmentsto other agents about what results will be available and when.
The use of commitmentsin the GPGPfamily of algorithms is based on the ideas of many
other researchers [2, 21, 1, 18]. Eachagent also has a heuristic local schedulerthat decides
whatactions the agent shouldtake and when,based on its current viewof the problemsolving
situation (including the commitments
it has made), and a utility function. Thecoordination
mechanisms
supply non-local viewsof problemsolving to the local scheduler, including what
non-localresults will be available locally, and whenthey will be available. Thelocal scheduler
creates (and monitors the execution of) schedules that attempt to maximizegroup quality
through both local action and the use of non-local actions (committedto by other agents).
One way to think about this work is that the GPGPapproach views coordination as
modulatinglocal control, not supplantingit--a twolevel process that makesa clear distinction betweencoordination behavior and local scheduling. This process occurs via a set of
coordination mechanisms
that post constraints to the local scheduler about the importanceof
certain tasks and appropriate times for their initiation and completion.Byconcentrating on
the creation of local schedulingconstraints, weavoid the sequentiality of schedulingin the
original PGPalgorithm [12] that occurs whenthere are multiple plans. By having separate
modulesfor coordinationand local scheduling,wecan also take advantageof advancesin realtime scheduling algorithms to producecooperative distributed problemsolving systems that
respondto real-time deadlines. Wecan also take advantageof local schedulersthat havea great
deal of domainscheduling knowledgealready encodedwithin them. Finally, our approach
allows consideration of termination issues that were glossed over in the PGPwork(where
termination was handledby an external oracle). This paper will also discuss howto decide
wheneach mechanismshould be used and howthe mechanismsinteract, drawing on simple
modelsof generic task structures and data from simulation experimentswheremultiple agent
teams workin abstract task environments.
The waythat we specify the family of algorithms in a general, domain-independentway
(as responsesto certain environmentalsituations and interactions with a local scheduler)
very important. It leads to the eventual construction of libraries of reusable coordination
componentsthat can be chosen(customized)with respect to certain attributes of the target
- 33-
application.
1.1 The Task Environment
Theobservation that no single organization or coordination algorithm is ’the best’ across
environments,problem-solvinginstances, or evenparticular situations is a common
one in the
study of both humanorganizational theory (especially contingencytheory) [19, 14, 22] and
cooperative distributed problemsolving [13, 11, 10, 8]. Keyfeatures of task environments
demonstratedin both these threads of workthat lead to different coordination mechanisms
include those related to the structure of the environment(the particular kinds and patterns of
interrelationships or dependenciesthat occur betweentasks) and environmentaluncertainty
(both in the apriori structure of any problem-solving
episodeand in the outcome’sof an agent’s
actions; for example,the presenceof both uncertainty and concomitanthigh variancein a task
structure). This makesit importantfor a general approachto coordination(i.e., one that will
be used in manydomains)to be appropriately parameterizedso that the overheadactivities
associated with the algorithm, in terms of both communication
and computation,can be varied
dependinguponthe characteristics of the application environment.
So far wehavemadetwo importantstatements: that there is ampleevidencethat no single
coordinationalgorithm is ’the best’ across different environments,and that we are going to
describe a family of coordinationalgorithms. That weneeda family of algorithmsfollows from
the first statement;wewill nowbriefly discusshowthat familyis organized.At the mostabstract
level, each of the five mechanisms
weare about to describe are parameterizedindependently
(the first twohavethree possiblesettings and the last three can be in or out) for a total of
combinations. Manyof these combinationsdo not showsignificantly different performance
in randomlygeneratedepisodes, as will be discussedin the experiments(Section 3), although
they mayallow for fine-tuning in specific applications. Moremechanisms
can (and have) been
addedto expandthe family, but the family can also be enlarged by makingeach mechanism
moresituation-specific. For example,mechanisms
can have their parametersset by a mapping
from dynamicmeta-level measurementssuch as an agent’s load or the amountof real-time
pressure. Mechanisms
canbe ’in’ or ’out’ for individualclasses of task groups,or tasks, or even
specific coordinationrelationships, that re-occur in particular environments.Thecross product
of these dynamicenvironmentalcues provides a large but easily enumeratedspace of potential
coordination responses that are amenableto the adaptation of the coordination mechanisms
over time by standard machinelearning techniques. In the experimentalsection of this paper
wewill only consider the coarsest parameterizationof the mechanisms.
Thereader should keep
in mindwhenreading about the various coordinationtechniques that wehaveexplicitly stated
that they will not be useful in everysituation. Instead, our purposeis to carefully describethe
mechanisms
and their interactions so that a decision about their inclusion in an application
can be madeanalytically or experimentally(wewill present an examplein Section 3).
1.1.1
Uncertainty
Less uncertainty in the environmentmeansless uncertainty in the existence and extent of the
task interdependencies,and less uncertaintyin local scheduling--thereforethe agentsneedless
complexcoordination behaviors (communication,negotiation, partial plans, etc) [20]. For
-34-
example, one can have cooperation without communication[17] if certain facts are known
about the task structure by all agents. In this paperagents will not havea priori information
about the structure of an episode, but they will be able to get information about a subset
of the structure after the start of problemsolvingmnosingle agent workingalone will be
able to construct a view of the entire problem(task structure) facing the group. This lack
of information (another form of environmentaluncertainty) can cause the local scheduler
makesub-optimaldecisions. Someof this uncertaintywill arise fromdisparities in the objective
(real) task structure and the subjective (agent-believed)task structure. For example,an agent
maynot knowthe true duration of a methodand if the execution variance is high maynot
even have a goodestimate. In this paper wewill be looking at environmentsthat do not have
this characteristic (of large variancebetweenobjectivecharacteristics and subjectiveestimatesof
those characteristics). Instead wewill focus on a secondsource of structural uncertainty--each
agent has only a partial subjective viewof the current episode.
1.1.2
Taskinterrelationships
Taskinterrelationships include the relationships of tasks to the performancecriteria by which
we will evaluate a system, to the control decision structures of the agents whichmakeup a
system, and to the performanceof other tasks. Wewill represent, analyze, and simulate the
effects of task interrelationships using the T/EMS(Task Analysis, EnvironmentModeling,and
Simulation)framework[9]. Theimportantfeatures of TIEMS
include its layered description of
environments
(objective reality, subjective mapping
to agent beliefs, generativedescriptionof the
other levels across single problem-solving
instances); its acceptanceof any performance
criteria
(based on temporallocation and quality of task executions);and its non-agent-centered
point of
view that can be used by researchers workingin either formal systemsof mental-state-induced
behavior or experimentalmethodologies.TheT/EMSobjective subtask relationship indicates
the relationship of tasks to system performancecriteria; the subjective mappingindicates
the initial beliefs available to an agent’scontrol decisionstructures; variousnon-localeffects
such as enables and facilitates indicate howthe executionof one task affects the duration or
quality of another task. Whena relationship extendsbetweenparts of a task structure that are
subjectively believedby different agents, wecall it a coordinationrelationship. Thebasic idea
behind GeneralizedPartial GlobalPlanning (GPGP)is to detect and respondappropriately
these coordinationrelationships.
1.1.3
Representing task environments
Aprobleminstance (called an episodeE) is definedas a set of task groups,each with a deadline
D(T), such as E = (~, T2,..., 7",,). Thetask groups (or subtasks within them)mayarrive
different times(At(x)is the arrival time of task x), but in this paperthey will all arrive at
start of problemsolving (like the classic DVMT).
Whiletask groups are independentof one
1,
another computationally the tasks within a single task groupare in general not independent.
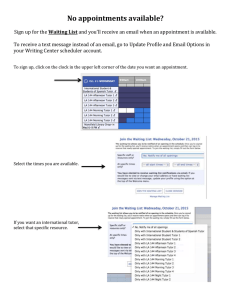
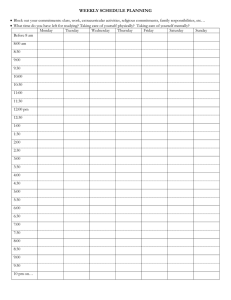
Figure 1 showsan objective task groupand agent A’s subjective viewof that task group. Atask
groupconsists of a set of tasks related to one another by a subtask relationship that formsan
acyclic graph(here, a tree). Thecircles higherup in the tree represent varioussubtasksinvolved
1 Except
fortheuseof theprocessor(s)
or otherphysical
resources.
- 35-
in the task group, and indicate precisely howquality will accrue dependingon what leaf tasks are
executed and when. Tasks at the leaves of the tree (without subtasks) represent methods, which
are the actual computations or actions the agent will execute (in the figure, these are shown
as boxes). The arrows between tasks and/or methods indicate other task interrelationships
where the execution of some methodwill have a positive or negative effect on the quality or
duration of another method. The presence of these interrelationships
makethis an NP-hard
scheduling problem; further complicating factors for the local scheduler include the fact that
multiple agents are executing related methods, that somemethods are redundant (executable at
more than one agent), and that the subjective task structure maydiffer from the real objective
structure. This notation and associated semantics are formally defined in [9].
method
(executable
task)
©
taskwithquality
accrualfunctionrain
subtaskrelationship
enablesrelationship
facilitatesrelationship
AgentAinitial subjecti~view
AgentB initial subjecti’~view
Figure1: AgentAandB’ssubjectiveviews(bottom)of a typicalobjectivetask group(top)
1.2 The AgentArchitecture
The T/EMSframeworkmakes very few assumptions about the architecture of agents--agents are
loci of belief and action. Agents have somecontrol mechanismthat decides on actions given the
agent’s current beliefs. There are three classes of actions: methodexecution, communication,
and information gathering. Methodexecution actions cause quality to accrue in a task group
(as indicated by the task structure). Communicationactions are used to send the results
methodexecutions (which in turn maytrigger the effects of various task interrelationships)
meta-level information. Information gathering actions add newly arriving task structures, or
newcommunications,to an agent’s set of beliefs.
Formally, we write B~(a~) to mean agent A subjectively believes z at time ~ (from
Shoham[21]). Wewill shorten this to B(~) when we don’t have a particular agent or time
mind. An agent’s subjective beliefs about the current episode B(E) includes the agent’s beliefs
about various task groups (e.g., B(7~ E E)), and an agent’s beliefs about each task group
includes beliefs about the tasks in that task group (e.g., B(T~, M~E 7~)) and the relationships
between these tasks (e.g., B(enables(T~, M~))).
- 36,
The GPGP
family of coordination algorithms makesstronger assumptionsabout the agent
architecture. Mostimportantly, it assumesthe presence of a local scheduling mechanism
(to
be described in the next section) that can decide what methodexecutionactions should take
place and when.It assumesthat agents do not intentionally lie and that they believe what
they are told (i.e. if agent A1tells agent A2at time tl with communicationdelay 8 that
BA1(enables(Ta, Mb)), then B~2(enables(Ta,Mb)) where t2 > tl + ~ is the earliest time
after the communicationarrives that agent A2 performs a newcommunicationinformation
gathering action to read the messagefrom A1). However,because agents can believe and
communicate
only subjective information, they mayunwittingly transmit information that is
inconsistent with an objective view (this can cause, amongother things, the phenomena
of
distraction). Finally, the GPGPfamily approach requires domain-dependentcode to detect
or predict the presenceof coordinationrelationships in the local task structure [5]. In this
paper wewill refer to that domain-dependent
codeas the informationgathering action detectcoordination-relatiomhipr,
wewill describethis action morein Section2.2.
1.3
The Local Scheduler
Each GPGP
agent contains a local scheduler that takes as input the current, subjectively
believed task structure and produces a schedule of what methodsto execute and when.Using
the informationin the subjective structure about the potential duration, potential quality,
and relationships of the methods,it choosesand orders executable methodsin an attempt to
maximize
a pre-definedutility measurefor each task groupT. In this paperthe utility function
is the sumof the task groupqualities. Thelocal scheduler attempts to maximizethis utility
function U(E) = ~rev. Q(T,D(T)), Q(T,t) denotesthe qual ity of T at time t a s
definedin [9].u
Besidethe subjectivetask structure, the local schedulershouldaccepta set of commitments
C
from the coordination component.These commitments
are extra constraints on the schedules
that are producedby the local scheduler. For example,if method1 is executableby agent Aand
method2 is executable by agent B, and the methodsare redundant,then agent A’s coordination
mechanismmaycommitagent A to do method1 both locally and socially (commitmentsare
directed to particular agents in the sense of the workof Shoham
and Castelfranchi [1, 21]) by
communicating
this commitment
to B (so that agent B’s coordination mechanism
records agent
A’s commitment,see the description of non-local commitments
NLCbelow). This paper will
use two types of commitments:C’(Do(T,q))is a commitment
to ’do’ (achieve quality for)
andis satisfied at the time t whenQ(T,t) _>q; the secondtype C’(DL(T,
q, tat)) is a ’deadline’
commitment
to do T by time tel and is satisfied at the time t when[Q(T,t) >_q] A [t <_ta].s
AscheduleS producedby a local schedulerwill consist of a set of methodsand start times:
S = {(Ml,tl), (M~,t2),..., (Mn, tn)}. The schedule mayinclude idle time, and the local
scheduler mayproduce morethan one schedule uponeach invocation in the situation where
not all commitments
can be met. Thedifferent schedulesrepresent different waysof partially
satisfying the set of commitments
(see [15] and the next section). Thefunction Violated(S)
returns the set of commitments
that are believed to be violated by the schedule. For violated
deadline commitmentsC(DL(T,q, tal)) Violated(S) th e fu nction Alt(C’, S’ ) re turns an
2Notethat quality does not accrueafter a task group’sdeadline.
3Othercommitments,
such as to the earliest start time of a tack, mayalso proveuseful.
-37-
alternative commitmentC(DL(T,q,t~l)) where t~l = mint such that Q(T, t) >_ if such a
t exists, or NIL otherwise. For a violated Do commitmentan alternative maycontain a lower
minimumquality, or no alternative maybe possible.
The final piece of information that is used by the local scheduler is the set of non-local
commitmentsmadeby other agents NLC.This information can be used by the local scheduler
to coordinate actions between agents. For example the local scheduler could have the property
that, if method M1is executable by agent A and is the only method that enables method M~
at agent B (and agent B knows this Bs(enables(M1, M2))), and BA(C(DL(M1,q,
BB(NLC), then for every schedule S produced by agent B, (M2, t) C S =~ t _> tl.
The function Ue,t(E, S, NLC)returns the estimated utility at the end of the episode
the agent follows schedule S and all non-local commitments in NLCare kept. Thus we
may define the local scheduler as a function LS(E, C, NLC)returning a set of schedules
S = {6’1, 6’2,..., 6’,,,}. Moredetailed information about this kind of interface between the
local scheduler and the coordination componentmay be found in [15].
This is an extremely general definition of the local scheduler, and is the minimal one
necessary for the GPGPcoordination module. Stronger definitions than this will be needed
for morepredictable performance, as we will discuss later.^ Ideally, the optimal local scheduler
would find both the schedule with maximumutility 6"u and the schedule with maximum
utility that violates no commitments
~’¢. In practice, however, a heuristic local scheduler will
produce a set of schedules wherethe schedule of highest utility Str is not necessarily optimal:
^
U(E, 6‘u, NLC) _< U(E, Su, NLC).
2
The Coordination Mechanisms
The role of the coordination mechanismsis to provide constraints to the local scheduler (by
modifying portions of the subjective task structure of the episode E or by makingcommitments
in C) that allow the local scheduler to construct objectivelybetter schedules. The modulesfulfill
this role by (variously) communicatingprivate portions of its task structures, communicating
results to fulfill non-local commitments,and makingcommitmentsto respond to coordination
relationships betweenportions of the task structure controllable by different agents or within
portions controllable by multiple 4agents.
The five mechanismswe will describe in this paper form a basic set that provides similar
functionality to the original partial global planning algorithm as explained in [6]. Mechanism
I exchanges useful private views of task structures; Mechanism2 communicatesresults; Mechanism 3 handles redundant methods; Mechanisms4 and 5 handle hard and soft coordination
relationships. Moremechanismscan be added, such as one to update utilities across agents as
discussed in the next section, or to balance the load better between agents. The mechanisms
are independent in the sense that they can be used in any combination. If inconsistent constraints are introduced, the local scheduler wouldreturn at least one violated constraint in all its
schedules, whichwouldbe dealt with as discussed in the next section. Since the local scheduler
is boundedlyrational and satisfices instead of optimizing, it maydo this even if constraints are
not inconsistent (i.e. it does not search exhaustively).
4We
say a subtreeof a task structureis controllable
byan agentif that agenthas at least oneexecutable
method
in that subtree.
- 38- ¯
2.1
The Substrate Mechanisms
All the specific coordination mechanismsrest on a commonsubstrate that handles information
gathering actions (new task group arrivals and receiving communications), invoking the local
scheduler and choosing a schedule to execute (including dealing with violated commitments),
and deciding whento terminate. Information gathering is done at the start of problem solving,
wheneverthe agent is otherwise idle (but not ready to terminate), and whencommunicationsare
expected from other agents. Communications
are expected in response to certain events (such as
after the arrival of a newtask group) or as indicated in the set of non-local commitmentsNLC.
This is the minimal general information gathering policy. 5 Termination occurs for an agent
when the agent is idle, has no expected communications, and no outstanding commitments.
Choosinga schedule is more complicated. Fromthe set of schedules S returned by the local
scheduler, two particular schedules are identified: the schedule with the highest utility Su and
the best committedschedule So. If they are the same, then that schedule is chosen. Otherwise,
we examine the sum of the changes in utility for each commitment. Each commitment, when
created, is assignedthe estimated utility U,,t for the task group.of whichit is a part. This utility
may be updated over time (when other agents depend on the commitment, for example).
then choose the schedule with the largest positive change in utility. This allows us to abandon
commitmentsif doing so will result in higher overall utility. The coordination substrate does
not use the local scheduler’s utility estimate Ue,t directly on the entire schedule because it
is based only on a local view, and the coordination mechanismmayhave received non-local
information that places a higher utility on a commitment
than it has locally.
For example, at time t agent A may make a commitment C, on task T 6 T1 6 E that
results in a schedule $1. 6’1 initially acquires the estimated utility of the task group of which
it is a part, U(C~) +-- U,,t({T~},S1,BA(NLC)). Let U(C~) = 50. After communicating
this commitment to agent B (making it part of BB(NLC),agent B uses the commitment
to improve U~,t({T~}, Su, BB(NLC))to 100. A coordination mechanism can detect
discrepancy and communicate the utility increase back to agent A, so that when agent A
considers discarding the commitment, the coordination substrate recognizes the non-local
autility of the commitment
is greater than the local utility,
If both schedules have the same impact, the one that is more negotiable is chosen. Every
commitment
has a negotiability index (high, medium,or low) that indicates (heuristically)
difficulty in rescheduling if the commitmentis broken. This index is set by the individual
coordination mechanisms. For example, hard coordination relationships like enables that
cannot be ignored will trigger commitmentswith low negotiability.
If the schedulesare still equivalent, the shorter one is chosen, and if they are the samelength,
one is chosen at random. After a schedule S is chosen, if Violated(S) is not empty, then each
commitmentC 6 Violated(S) is replaced with its alternative C +- C \ C U Alt(C, S). If
commitmentwas madeto other agents, the other agents are also informed of the change in the
5Theminimalpolicy wouldexamineeach dementof NLCat the appointedtime and if the local schedule
hadchanged
so that the receptionof the informationwouldnolongerhaveanyeffect, the associatedinformation
gatheringactioncouldbe skipped.
awhileit is dear that withoutthis policythe systemof agentswill performnon-optimally,
it is not dearhow
often the situationoccursor whatthe performance
hit is. Futureworkwill haveto examine
the costsandbenefits
of this policy; for this reason’we
donot includethis mechanism
among
the five examined
in this paper.
- 39-
commitment.
Whilethis could potentially cause cascadingchangesin the schedulesof multiple
agents, it generallydoesnot for three reasons: first, as wementioned
in the previousparagraph
less importantcommitments
are brokenfirst; secondly,the resiliancy of the local schedulersto
solve problemsin multiple waystends to dampout these fluctuations; and third, agents are
time cognizantresource-boundedreasoners that interleave executionand scheduling(i.e., the
agents cannotspendall day arguingover schedulingdetails and still meettheir deadlines). We
have observedthis useful phenomenon
before [7] and plan to analyzeit in future work.
2.2
Mechanism1: Updating Non-Local Viewpoints
Remember
that each agent has only a partial, subjective view of the current episode. Agents
can, therefore, communicate
the private portions of their subjective task structures to develop
better, non-local, views of the current episode. Theycould even communicate
all of their
private structural information, in an attempt to developa global subjective view. TheGPGP
mechanismdescribed here can communicateno private information (’none’ policy, no nonlocal view),or all of it (’all’ policy, globalview),or take an intermediateapproach(’some’policy,
partial view): an agent communicates
to other agentsonly the private structures that are related
by somecoordination relationship to a structure knownby the other agents. Theprocess of
detecting coordinationrelationships betweenprivate and shared parts of a task structure is in
general very domainspecific, so in the experimentspresentedlater in the paper wemodelthis
processby a newinformationgatheringaction, detect-coordination-relationships,
that takes some
fixed amountof the agent’s time. This action is chosenwhena newtask grouparrives (which
adds newinformationto the agent’s private task structures).
Theset P of privately believedtasks or methodsat an agent A(tasks believedat arrival time
by Aonly) is then {z I Task(z) A~/a E A \ A, -~Ba(B~r(~’)(z))}, whereAis the
agents and Ar(z) is the arrival time ofz. Giventhis definition, the action detect-coordinationrelationships returns the set of private coordinationrelationships PCR= {r I T1 E P AT2
P A [r(T1, T2) Vr(T2, T~)]} betweenprivate and mutually believed tasks. The action
not return whatthe task T~is, just that a relationship exists betweenT1 and someotherwise
unknown
task T2. For example,in the DVMT,
wehave used the physical organization of agents
to detect that AgentA’Stask T1 in an overlappingsensor area is in fact related to someunknown
task T2 at agent B (i.e. Ba(Bm(T2)))[6, 5]. The non-local view coordination mechanism
then communicates
these coordinationrelationships, the private tasks, and their context: if
7"(T1, Tz) E PCRand T1 C P then ~" and T1 will be communicatedby agent A to the set
agents {a [Ba(Ba(T,))}.
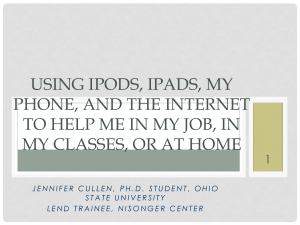
For example,Figure 2 showsthe local subjective beliefs of agents A and B after the
communicationfrom one another due to this mechanism.Theagents’ initial local view was
shownpreviouslyin Figure 1. In this example,Ts and T4 are two elementsin AgentB’s private
set of tasks P, facilitates(T4, T~, ~bd, ~q) C PCR(the facilitation relates a private task
a mutuallybelieved task), and enables(T4,Ts) is completelylocal to AgentB (it relates
private tasks). At the start of this section wementionedthat coordinationrelationships exist
betweenportions of the task structure controllable by different agents (i.e., in PCR)and
within portions controllable by multiple agents. We’ll denotethe completeset of coordination
relationships as CR;this includes all the elementsof PCRand all the relationships between
non-privatetasks. Somerelationships are entirely local--betweenprivate tasks and are only of
- 40-
withqualitytask)
~ methodtask
(executable
accrual
functionmin
subtaskrelationship
-). enablesrelationship
~
~
facilitates
Agent
A’sview
aftercommunication
fromB
relationship
Agent
B’sviewaftercommunication
fromA
Figure 2: Agents A and B’s local views after receiving non-local viewpoint communicationsvia mechanism1.
Figure1 showsthe agents’initial states.
concernto the local scheduler. Thepurposeof this coordinationmechanism
is the exchangeof
information that expandsthe set of coordination relationships CR.Withoutthis mechanism
in place, CRwill consist of only non-private relationships, and none that are in PCR.Since
the primary focus of the coordination mechanisms
is the creation of social commitments
in
responseto coordinationrelationships (elements of CR),this mechanism
can have significant
indirect benefits. In environmentswhereI PCRItends to be small, very expensiveto compute,
or not useful for makingcommitments
(see the later sections), this mechanism
can be omitted.
2.3
Mechanism2: CommunicatingResults
The result communicationcoordination mechanismhas three possible policies: communicate
only the results necessaryto satisfy commitments
to other agents (the minimalpolicy); communicatethis informationplus the final results associated with a task group(’TG’ policy),
and communicate
all results (’all’ policy). Extra result communications
are broadcast to all
agents, the minimalcommitment-satisfyingcommunications
are sent only to those agents to
whomthe commitmentwas made(i.e., communicatethe result of T to the set of agents
.[A
}. e A IB(BA(C(T))
2.4
Mechanism3: Handling Simple Redundancy
Potential redundancyin the efforts of multiple agents can occur in several places in a task
structure. Anytask that uses a ’max’quality accumulationfunction (one possible semantics
for an ’OR’node)indicates that, in the absenceof other relationships, only one subtaskneeds
to be done. Whensuch subtasks are complexand involve manyagents, the coordination of
these agents to avoidredundantprocessingcan also be complex;wewill not address the general
redundancyavoidanceproblemin this paper (see instead [20]). In the original PGPalgorithm
and domain(distributed sensor interpretation), the primary form of potential redundancy
was simple methodredundancy--the sameresult could be derived from the data from any of
a numberof sensors. The coordination mechanismdescribed here is meant to address this
-41-
simpler form of potential redundancy.
The idea behind the simple redundancy coordination mechanism is that when more than
one agent wants to execute a redundant method, one agent is randomly chosen to execute
it and send the results to the other interested agents. This is a generalization of the ’static’
organization algorithm discussed by Deckerand Lesser [8]--it does not try to load balance, and
uses one communicationaction (because in the general case the agents do not knowbeforehand,
without communication, that certain methods are redundantT). The mechanismconsiders the
set of potential
redundancies RCR= {r E CR I [r = subtask(T,M, min)] A [VM
M, method(M)]}. Then for all methods in the current schedule S at time t, if the methodis
potentially redundant then commit to it and send the commitmentto Others(M) (non-local
agents who also have a method in M):
[<M, tM> e S] A
[subtask(T,M,
min) ¯ RCR]
[M eM]
:::>
[C(Do(M,Q..t(M,D(M),S)))
[Comm(M,Others(M),t)
A
e
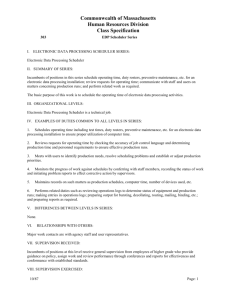
See for example the top of figure 3--both agents committo Do their methods for T1.
After the commitment is made, the agent must refrain from executing the method in
question if possible until any non-local commitmentsthat were madesimultaneously can arrive
(the communicationdelay time 8). This mechanismthen watches for multiple commitments
the redundant set (subtask(T,M,
min) C RCR, M1 E M,/I//2 C C(Do(MI,q))E C,
a
and BB(C(Do(M2,
q))) NL
C) and if they appear, a u ni que age nt is chosen ran domly
(but identically by all agents) from those with the best commitmentsto keep its commitment.
All the other agents can retract their commitments.For example the bottom of figure 3 shows
the situation after Agent B has retracted its commitmentto Do B1. If all agents follow the
same algorithm, and communication channels are assumed to be reliable, then no second
message(retraction) actually needs to be sent (because they all choose the sameagent to do
redundant method). In the implementation described later, identical random choices are made
by giving each methoda unique randomidentifier, and then all agents choose the methodwith
the ’smallest’ identifier for execution.
Initially,
all Do commitmentsinitiated by the redundant coordination mechanismare
marked highly negotiable. Whena redundant commitmentis discovered, the negotiability of
the remaining commitment is lowered to mediumto indicate the commitment is somewhat
more important.
2.5
Mechanism4: Handling HardCoordination Relationships
Hard coordination relationships include relationships like enables(M1,/1//2) that indicate that
M1must be executed before M2in order to obtain quality for M2. Like redundant methods,
hard coordination relationships can be culled from the set CR. The hard coordination
"rThedetectionof redundantmethodsis domain-dependent,
as discussedearlier. Sinceweare talking here
aboutsimple,direct redundancy
(i.e. doingthe exactsamemethod
at morethanoneagent)this detectionis very
straight-forward.
SRead"21//1 and M2are redundant,and I amdoingMIand I knowthat B has committed
to meto do Mu".
- 42-
Agent A ~t view after rommunicationflom B
O/(T4,50,5)
[M¢ch#5]
Agent B’s view after communicationfiom A
1
12
t~5
Agent A’s view after recieveing B’s commitments
t!lO
"
AgentB’s view after r~ceiving A ’s commitments
Figure3" Acontinuation
of FiguresI and2. Attop: agentsAandBproposecertaincommitments
to oneanother
via mechanisms
3 and5. Atbottom:after receivingthe initial commitments,
mechanism
3 removes
agentB’s
redundantcommitment.
mechanism
further distinguishes the direction of the relationship---the current implementation
only creates commitments
on the predecessors of the enables relationship. We’ll let HPCR
C
CRindicate the set of potential hard predecessor coordination relationships. The hard
coordination mechanism
then looks for situations wherethe current scheduleS at time t will
producequality for a predecessorin HPCR,
and commitsto its executionby a certain deadline
both locally and socially:
[Q..~(T,D(T),S) > O] A
::=> [C(DL(T,Q..t(T,D(T),S),t.,,~Iy))
[enables(T, M) HPCR]
[Comm(C,Others(M),t)
C]A
The next question is, by what time (tearly above) do we committo providing the answer?
Onesolution, usable with any local schedulerthat fits our general description in Section1.3,
is to use the mint such that Qe,t(T,D(T),S) > 0. In our implementation, the local
schedulerprovidesa queryfacility that allowsus to proposea commitment
to satisfy as ’early’
as possible (thus allowingthe agent on the other end of the relationship moreslack). Wetake
- 43.
advantageof this ability in the hard coordination mechanismby adding the newcommitment
C’(DL(T,Q,,t(T,D(T),S),"early")) to the local commitments6’, and invoking the local
scheduler LS(E, C, NLC)to produce a newset of schedules S. If the preferred, highest
utility scheduleSu E S has no violations (highly likely since the local scheduler can simply
return the samescheduleif no better one can be found), wereplace the current schedulewith
it and use the newschedule,with a potentially earlier finish time for T, to providea value for
te,,rly. Thenewcompletedcommitment
is entered locally (with low negotiability) and sent
the subset of interested other agents.
If redundant commitmentsare madeto the sametask, the earliest commitmentmadeby
any agent is kept, then the agent committingto the highest quality, and any remainingties are
broken by the samemethodas before.
Currently, the hard coordination mechanismis a proactive mechanism,providing informationthat mightbe used by other agents to them, while not putting the individual agent to
any extra effort. Other future coordination mechanisms
mightbe addedto the family that are
reactive and request fromother agents that certain tasks be doneby certain times; this is quite
different behaviorthat wouldneedto be analyzedseparately.
2.6
Mechanism
5: HandlingSoft Coordination Relationships
Soft coordinationrelationships are handledanalogouslyto hard coordinationrelationships except that they start out with high negotiability. In the current implementation
the predecessor
of a facilitates relationship is the only one that triggers commitments
across agents, although
hindersrelationships are present. Thepositive relationship facilitates(M1, M2,~d, ~q) indicates that executingM1before M2decreases the duration of M2by a ’power’factor related to
~b,t and increases the maximum
quality possible by a ’power’factor related to 4~, (see [9] for
the details). A moresituation-specific version of this coordination mechanism
mightignore
relationships with very low ’power’.Therelationship hinders(M1,M2,~bd, qSq)is negativeand
indicates an increase in the duration of M2and a decrease in maximum
possible quality. A
coordination mechanismcould be designedfor hinders(and similar negative relationships)
and addedto the family. To be proactive like the existing mechanisms,a hinders mechanism
wouldworkfrom the successors of the relationship, try to schedulethemlate, and committo
an earliest start time on the successor. Figure 3 showsAgentB makinga Dcommitment
to do
methodB4, whichin turn allows AgentA to take advantageof the facilitates(T4, T1, 0.5, 0.5)
relationship, causingmethodA1to take only half the time and produce1.5 times the quality.
3
Experimentsin Generalized Partial Global Planning
In this final section wewill discuss experimentswehave conductedwith our implementation
of theseideas:
¯ Methodologically, howshould we decide whenthe addition of a particular mechanism
is warranted?
¯ Whatis the performanceof a system using all the mechanismscomparedto a system
that only broadcastsresults? Compared
to a systemwith a centralized scheduler?
-44.
¯ Whatis the performancespace of the GPGP
family, as delineated by the five existing
mechanisms?
As we have stated several times in this paper, we do not believe that any of the mechanisms
that collectively form the GPGP
family of coordination algorithms are indispensable. What
we can do is evaluate the mechanismson the terms of their costs and benefits to cooperative
problemsolving both analytically andexperimentally. This analysis and experimentationtakes
place with respect to a very general task environmentthat does not correspondto a particular
domain.Doing this producesgeneral results, but weakerthan wouldbe possible to derive in
a single fixed domainbecause the performancevariance between problemepisodes will be far
greater than the performance
varianceof the different algorithmswithin a single episode. Still,
this allows us to determinebroadcharacteristics of the algorithmfamily that can be used to
reducethe search for a particular set of mechanism
parametersfor a particular domain(with or
without machinelearning techniques). Wewill also discuss statistical techniquesto deal with
the large between-episodevariances that occur whenusing randomly-generatedproblems.
Ourmodelof an abstract task environmenthas ten parameters;Table 1 lists themand the
values used in the experimentsdescribedin the next two sections.
Parameter
MeanBranchingfactor (Poisson)
MeanDepth(Poisson)
MeanDuration(exponential)
Redundant Method QAF
Number
of task groups
TaskQAFdistribution
Values(facilitation exps.)
1
3
10
Max
2
(20%/80%rain/max)
HardCRdistribution
(10%/90%enables/none)
Soft CRdistribution
(80%/10%/10%
facilitates/hinders/none)
Chanceof overlaps(binomial)
FacilitationStrength
10%
.1.5.9
Values(dusterin~exps.)
1
3
(1 10 100)
Max
(1 5 10)
(50%/50%rain/max)
( 100%/0%rain/max)
(0%/100%enables/none)
(50%/50%enables/none)
(0%/10%/90%
facilitates/hinders/none)
(50%/10%/40%
facilitates/hinders/none)
(0% 50% 100%)
.5
Table1: Environmental
Parameters
usedto generatethe random
episodes
The primary sources of overhead associated with the coordination mechanismsinclude
action executions (communicationand information gathering), calls to the local scheduler,
and any algorithmic overhead associated with the mechanismitself. Table 2 summarizesthe
total amountof overhead from each source for each coordination mechanismsetting and
the coordination substrate. L represents the length of processing (time before termination),
and d is a general density measureof coordination relationships. Webelieve that all of
these amountscan be derived from the environmental parameters in Table 1, they can also
be measuredexperimentally. Interactions between the presence of coordination mechanisms
and these quantities include: the numberof methodsor tasks in E, which depends on the
non-local view mechanism;the numberof coordination relationships ICRI or the subsets
RCR, HPCR,SPCR, which depends on the number of tasks and methods as well; and
the numberof commitmentsI C[, which depends on each of the three mechanismsthat makes
commitments.The relationships between these quantities can be modeledand verified using
methodssimilar to those in [8].
-\
- 45
\
Mechanismsetting
Communications
substrat¢
0
nlv none
0
some 0(dP)
all 0(P)
comm min
o(c)
TG o(c+ E)
all
redundant on
hard on
soft
on
O(M~ E)
0(RCR)
0(IIPCR)
0(SPCR)
InformationGathering
E + idle
0
E detect.CRs
E detect-CRs
0
0
0
0
0
0
Scheduler
L
0
0
0
0
0
0
0
0(HPCR)
O(SPCR)
Other Overhead
o(r,c)
0
O(Te ~)
O(TE ~)
O(C)
O(C+ ~)
O(M~ ~)
0(RCR * S + OR)
O(HPCR ¯ 5 + CR)
O(SPCR ¯ S + CR)
Table 2: Overheadassociated with individual mechanisms
at each parametersetting
Decidingto add a mechanism.A practical question to ask is simply whether the addition
of a particular mechanismwill benefit performancefor the system of agents. Here we give
an examplewith respect to the soft coordination mechanism,which will makecommitments
to facilitation relationships. Weran 234 randomlygenerated episodes (generated with the
environmentalparametersshownin Table 1) with four agents both with and without the soft
coordination mechanism.Becausethe variance betweenthese randomlygenerated episodes is
so great, wetook advantageof the paired responsenature of the data to run a non-parametric
Wilcoxonmatched-pairs signed-ranks test [3]. This test is easy to computeand makesvery
fewassumptions--primarilythat the variables are interval-valued and comparablewithin each
blockof paired responses.For each of the 234blocks wecalculated the difference in the total
final quality achieved by each group of agents and excluded the blocks wherethere wasno
difference, leaving 102blocks. Wethen replace the differences with the ranks of their absolute
values, and then replace the signs on the ranks. Finally wesumthe positive and negativeranks
separately. AstandardizedZ score is then calculated. Asmall value of Z meansthat there was
not muchconsistent variation, while a large value is unlikely to occur unless one treatment
consistently outperformedthe other. In our experiment,the null hypothesisis that the system
with the soft coordination mechanism
did the sameas the one withoutit, and our alternative
is that the systemwith the soft coordination mechanism
did better (in terms of total final
quality). Theresult here wasg = -6.9, whichis highly significant, and allowsus to reject the
null hypothesisthat the mechanism
did not have an effect.
PerformanceIssues. Another question is howthe performanceof a fully configured system
compareswith optimal performance.While wehave no optimal parallel scheduler with which
to compareourselves, wedo havea single agent optimalschedulerand a centralized, heuristic
parallel scheduler that takes the single-agent optimalscheduleas its starting point. In 300
paired response experimentsbased on the sameenvironmentalparametersas the facilitation
experiments(Table 1), the centralized parallel scheduler outperformedour distributed, GPGP
agents 57%of the time (36%no difference, 7%distributed wasbetter) using the total final
quality as the only criterion. TheGPGP
agents produced85%of the quality that the centralized
parallel schedulerdid, on average. Theseresults needto be understoodin the proper context-the centralized scheduler takes muchmoreprocessing time that the distributed scheduler and
can not be scaled up to larger numbersof methodsor task groups. Thecentralized scheduler
also starts with a global view of the entire episode. XVealso lookedat performancewithout
- 46,
any of the mechanisms; on the same 300 episodes the GPGPagents produced on average 1.14
times the final quality of the uncoordinated agents. These experiments had very low numbers
of enables relationships, which tend to hurt the uncoordinated agents, and also remember
that we are only looking at one performance measuremtotal final quality. Coordinated agents
execute far fewer methodsbecause of their ability to avoid redundancy, but this does not show
up in final quality because there is no real-time pressure in these 300 episodes (we kept the time
pressure constantly low). The redundant execution of methods proves a muchmore hindering
element to the uncoordinated agents whenacting under severe time pressure [4].
Examining the family’s performance space. Next we looked at the multidimensional performance space for the family of coordination algorithms over four different performance
measures. Earlier we mentioned that although our simple initial parameterization results in
72 possible coordination algorithms, manyof these are not statistically
different from one
another in randomly generated environments. Weapplied two standard statistical clustering
techniques to develop a muchsmaller set of significantly different algorithms. The resulting
five ’prototypical’ combinedbehaviors are a useful starting point in evaluating the family in a
new environment.
!
!
¯
2.0
¯
I
¯
-I-
o 1.0
~o
I
|
I
I
0.0
~-1.0
-2.0
4I
I
Balanced Mute Myopic
I
I
I
Simple
Balanced
Tough
I
Mute Myopic
I
I
Simple
Tough
3
2.0
2
,
1.0
~
-1/-
1-"
0.0
~
0 ..........
91.0
#
-2.0
-3.0
I
Balanced
I
I
Mute Myopic Simple
I
-3
Tough
Balanced
Mute Myopic Simple
Tough
Figure4: StandardizedPerformance
by the 5 namedcoordinationstyles.
The analysis proceeded as follows: for 63 randomly chosen environments, we generated
one random episode and ran each of the 72 "agent types" on the episode (4536 cases).
\,
- 47-
collected four performance measures: total quality, number of methods executed, number of
communicationactions, and termination time. Wethen took this data and standardized each
performance measure within an environment. So now each measure is represented as the number of standard deviations from the mean value in that environment. Wethen took summary
statistics for each measure grouped by agent types--this boils the 4536 cases (standardized
within each environment) into 72 summarycases (summarized across environments). Each
the 72 summaries correspond to the average standardized performance of one agent-type for
the four performance measures. Wethen used both a hierarchical clustering algorithm (SYSTATJOIN with complete linkage) and a linear clustering algorithm (SYSTATKMEANS)
produce the following general prototypical agent classes (we chose one representative algorithm
in eachclass):
Simple: No commitmentsor non-local view, just broadcasts results.
Myopic: All commitment mechanisms on, but no non-local view.
Balanced: All mechanisms on.
Tough-guy: Balanced agent that makes no soft commitments.
9Mute: No communication whatsoever
KMEANS
also produces the mean value of each performance measure for each group, so
you can in fact see that the non-communicatingagents have a high negative mean"number-ofcommunications"(- 1.16-remember these were averaged from standardized scores) but execute
more methods on average and produce less final quality. They also terminate slightly quicker
than average. Our "Balanced" group, in comparison, communicatesa little more than average,
executes manyfewer methods(- 1.29--wayout on the edge of this statistic), returns better-thanaverage quality and about average termination time. This is reasonable, as ’avoiding redundant
work’ and other work-reducing ideas are a key feature of the GPGPalgorithm.
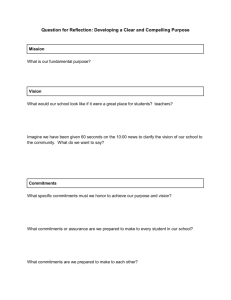
Figure 4 shows the values of several typical performance measures for only the five named
types. Performancemeasures were standardized within each episode, (i.e. across all 72 types).
Shown for each are the means and 10, 25, 50, 75, and 90 percent quantiles. All agents’
performances are significantly different by Tukey Kramer HSDexcept for: MethodExecution
(Simple vs. Mute), Total final quality (Balanced vs. Tough), Deadlines missed (simple
mute) and (balanced vs. tough).
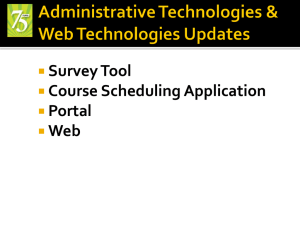
Weare also analyzing the effect of environmental characteristics on agent performance.
Figure 5 shows an example of the effect of the a priori amount of overlap on the number of
method execution actions for the five namedagent types. Note again that the balanced and
tough agents do significantly less work whenthere is a lot of overlap (as wouldbe expected).
The performance of the tough and balanced agents is similar because (from Table 1) only half
the experiments had any facilitation, and whenit was present was only at 50
4
Conclusions and Future Work
This paper discusses the design of an extendable family of coordination mechanisms, called
Generalized Partial Global Planning (GPGP),that form a basic set of coordination mechanisms
9This algorithm makesno commitments
(mechanisms
3, 4, and 5 off) and communicates
(mechanism
only ’satisfied commitments’--therefore
it sendsno communications
ever!.
- 48~
!#
o
L Mute
.~
+
g
Myopic
.~
~
+
~""
-1
-2
.............
ouch
i
"
I
Balanced
*
+
-3
÷
I
-0.1
]l
i
I I I I I I I I I I
0.1
0.3
0.5
0.7
0.9
1.1
Overlap
Figure5: Theeffect of overlapsin the task environment
on the standardizedmethodexecutionperformance
by
the 5 namedcoordination
styles (smoothed
splines fit to the means).
for teams of cooperative computational agents. An important feature of this approach includes
an extendable set of modular coordination mechanisms, any subset or all of which can be
used in response to a particular task environment. This subset maybe parameterized, and
the parameterization does not have to be chosen statically, but can instead be chosen on a
task-group-by-task-group basis or even in response to a particular problem-solving situation.
For example, Mechanism5 (Handle Soft Predecessor CRs) might be "on" for certain classes
of tasks and ’off’ for other classes (that usually have few or very weaksoft CRs). The general
specification of the GPGPmechanismsinvolves the detection and response to certain abstract
coordination relationships in the incoming task structure that were not tied to a particular
domain. A careful separation of the coordination mechanismsfrom an agent’s local scheduler
allows each to better do the job for which it was designed. A complete discussion of the
scheduler/decision-maker interface can be found in our companionpaper [15]. Webelieve this
separation is not only useful for applying our coordination mechanismsto existing problems
with existing, customized local schedulers, but also to problems involving humans(where the
coordination mechanismcan act as an interface to the person, suggesting possible commitments
for the person’s consideration and reporting non-local commitmentsmadeby others).
Applicationdesigners will find this general specification of partial global planning coordination behaviors easier to adapt to their domainsthan the original distributed vehicle monitoring
testbed implementation. Whatis required to use GPGPor similarly designed algorithms is a
local scheduler that can handle local and non-local commitmentsand can communicate via
task structures (the interface is fully described in [15]). GPGPalso requires domain-dependent
code to detect potential coordination relationships to other agents and verify their presence
after non-local information has been received. This paper has outlined the overhead involved
with each mechanism, and discussed experimental techniques for demonstrating improved
performance in an application. Future work will involve elaborating and validating models
.49 -
of these coordination mechanismsthat link environmentalparameters to both overheadand
performance.
Wealso discussedhowto limit the initial searchfor a suitable application-specific
coordination algorithm by using prototypical algorithm family members.
Worknot reported here includes the developmentof a load-balancing coordination mechanismthat worksby providingbetter informationto the agents with whichto resolve redundant
commitments. More mechanisms, and more complex mechanismsare possible; for example, mechanisms
that workfrom the successors of hard and soft relationships instead of the
predecessors, or negotiation mechanisms.Mechanismsfor behavior such as contracting are
also possible. As always, the importantquestion will be "in whatenvironmentswill the extra
overheadof these mechanismsbe worthwhile." Future workwill also examineexpandingthe
parameterization of the mechanismsand using machinelearning techniques to choose the
appropriate parametervalues (i.e., learning the best family member
for an environment).
References
[1] C. Castelfranchi. Commitments:
fromindividual intentions
to groupsand organizations.
In MichaelPrietula, editor, A/andtheories of groups& organizations: Conceptualand
Empirical Research. AAAIWorkshop,1993. WorkingNotes.
[2] Philip R. Cohenand HectorJ.
Levesque.Intention is choice with commitment.
Artificial
lnteUigence,42(3), 1990.
[3] W.W. Daniel. Applied NonparametricStatistics. Houghton-Mifflin,Boston, 1978.
[4] Keith S. Decker.EnvironmentCenteredAnalysis and Designof CoordinationMechanisms.
PhDthesis, University of Massachusetts,1994.
[5] Keith S. Decker, Alan J.
Garvey, MartyA. Humphrey,
and Victor R. Lesser. Effects of
parallelism on blackboardsystemscheduling. In Proceedingsof the Twelfth IJCALpages
15-21, Sydney,Australia, August1991. Extendedversion in International Journal of
Pattern Recognitionand Artificial Intelligence 7(2) 1993.
[6] Keith S. Deckerand Victor R. Lesser. Generalizingthe partial
global planningalgorithm.
International Journal of Intelligent and CooperativeInformationSystems, 1(2):319-346,
June 1992.
[7] Keith S. Deckerand Victor R. Lesser. Analyzinga quantitative coordinationrelationship.
GroupDecisionand Negotiation, 2(3): 195-217,1993.
[8] Keith S. Deckerand Victor R. Lesser. Anapproachto
analyzing the needfor meta-level
communication.In Proceedingsof the Thirteenth IJCAI, Chamb~ry,August1993.
[9] Keith S.
Decker and Victor R. Lesser. Quantitative modeling of complexcomputational task environments.In Proceedingsof the EleventhNationalConferenceon Artificial
Intelligence, pages 217-224,Washington,July 1993.
Coordinationas distributed search in a hierarchical
[10] E. H. Durfeeand T. A. Montgomery.
behavior space. IEEETransactions on Systems, Man,and Cybernetics, 21(6):1363-1378,
November1991.
[II]
EdmundH. Durfee,
Victor R. Lesser, and Daniel D. Corkill. Coherent cooperation
amongcommunicatingproblemsolvers. IEEETransactions on Computers,36(11):12751291, November1987.
[12] E.H. Durfee and V.R. Lesser. Partial global planning: A coordination frameworkfor
distributed hypothesis formation. IEEETransactionson Systems, Man,and Cybernetics,
21(5):1167-1183, September 1991.
[13]MarkS. Fox. Anorganizationalviewof distributed systems. IEEETransactionson Systems,
Man,and Cybernetics,11 (1) :70-80, January1981.
[14] J. Galbraith. OrganizationalDesign. Addison-Wesley,Reading, MA,1977.
[15]Alan Garvey, Keith Decker, and Victor Lesser.
A negotiation-based interface between
a real-time scheduler and a decision-maker. CSTechnical Report 94--08, University of
Massachusetts, 1994.
[16] Alan Garveyand Victor Lesser. Design-to-timereal-time scheduling. IEEETransactions
on Systems, Man,and Cybernetics, 23(6), 1993. Special Issue on Scheduling,Planning,
and Control.
[17] M. R. Genesereth, M. L. Ginsberg, and J. S. Rosenschein. Cooperation without communication.In Proceedings
of the FiShNationalConference
on Artificial Intelligence, pages
51-57, Philadelphia, PA., August1986.
[18] N. R. Jennings. Commitmentsand conventions: The foundation of coordination in
multi-agent systems. The KnowledgeEngineeringReview, 8(3):223-250, 1993.
[19] Paul Lawrenceand Jay Lorsch. Organizationand Environment.HarvardUniversity Press,
Cambridge, MA,1967.
[20] V. R. Lesser. Aretrospective viewof FA/Cdistributed problemsolving. IEEETransactions
on Systems, Man,and Cybernetics, 21 (6): 1347-1363,November
1991.
A simple agent
[21]YoavShoham.AGENT0:
language and its interpreter. In Proceedings
of the Ninth NationalConferenceon Artificial Intelligence, pages 704-709,Anaheim,July
1991.
[22] Arthur L. Stinchcombe.Information and Organizations.University of California Press,
Berkeley, CA,1990.
[23]Frankv.
Martial. CoordinatingPlansof Autonomous
Agents. Springer-Verlag,Berlin, 1992.
LectureNotesin Artificial Intelligence no. 610.
¯ -$1- -