Extending the Knowledge-Based Approach to Planning with Incomplete Information and Sensing
advertisement

Extending the Knowledge-Based Approach to Planning with Incomplete
Information and Sensing∗
Ronald P. A. Petrick
Fahiem Bacchus
Department of Computer Science
University of Toronto
Toronto, Ontario
Canada M5S 1A4
rpetrick@cs.utoronto.ca
Department of Computer Science
University of Toronto
Toronto, Ontario
Canada M5S 1A4
fbacchus@cs.utoronto.ca
Abstract
In (Petrick and Bacchus 2002), a “knowledge-level” approach
to planning under incomplete knowledge and sensing was
presented. In comparison with alternate approaches based on
representing sets of possible worlds, this higher-level representation is richer, but the inferences it supports are weaker.
Nevertheless, because of its richer representation, it is able to
solve problems that cannot be solved by alternate approaches.
In this paper we examine a collection of new techniques for
increasing both the representational and inferential power of
the knowledge-level approach. These techniques have been
fully implemented in the PKS (Planning with Knowledge and
Sensing) planning system. Taken together they allow us to
solve a range of new types of planning problems under incomplete knowledge and sensing.
Introduction
Constructing conditional plans that employ sensing and
must operate under conditions of incomplete knowledge is
a challenging problem, but a problem that humans deal with
on a daily basis. Although planning in this context is generally hard—both theoretically and practically—there are
many situations where “common-sense” plans with fairly
simple structure can solve the problem.
In (Petrick and Bacchus 2002), a “knowledge-level” approach to planning with sensing and incomplete knowledge
was presented. The key idea of this approach is to represent
the agent’s knowledge state using a first-order language, and
to represent actions by their effects on the agent’s knowledge, rather than by their effects on the environment.
General reasoning in such a rich language is impractical, however. Instead, we have been exploring the approach
of using a restricted subset of the language and a limited
amount of inference in that subset. The motivation for this
approach is twofold. First, we want to accommodate nonpropositional features in our representation, e.g., functions
and variables. Second, we are motivated more by the ability to automatically generate “natural” plans, i.e., plans that
humans are able to find and that an intelligent agent should
be able to generate, rather than by the ability to generate
all possible plans—humans cope quite well with incomplete
∗
This research was supported by the Canadian Government
through their NSERC program.
knowledge of their environment even with limited ability to
generate plans. In this paper we present a collection of new
techniques for increasing the representational and inferential
power of the knowledge-based approach.
An alternate trend in work on planning under incomplete
knowledge, e.g., (Bertoli et al. 2001; Anderson, Weld,
and Smith 1998; Brafman and Hoffmann 2003), has concentrated on propositional representations over which complete reasoning is feasible. The common element in these
works has been to represent the set of all possible worlds
(i.e., the set of all states compatible with the agent’s incomplete knowledge) using various techniques, e.g., BDDs
(Bryant 1992), Graphplan-like structures (Blum and Furst
1997), or clausal representations (Brafman and Hoffmann
2003). These techniques yield planning systems that are able
to generate plans requiring complex combinatorial reasoning. Because the representations are propositional, however,
many natural situations and plans cannot be represented.
The difference in these approaches is well illustrated by
Moore’s classic open safe example (Moore 1985). In this
example there is a closed safe and a piece of paper on
which the safe’s combination is written. The goal is to
open the safe. Our planning system, PKS, based on the
knowledge-level approach, is able to generate the obvious
plan hreadCombo; dial(combo())i: first read the combination, then dial it. What is critical here is that the value of
combo() (a 0-ary function) is unspecified by the plan. In
fact, it is only at execution time that this value will become
known.1 At plan time, all that is known is that the value
will become known at this point in the plan’s execution. The
ability to generate parameterized plans containing run-time
variables is useful in many planning contexts. Propositional
representations are not capable of representing such plans,
and thus, approaches based on propositional representations
cannot generate such plans (at least not without additional
techniques that go beyond propositional reasoning).
There are also a number of examples of plans that can be
generated by “propositional possible worlds” planners that
cannot be found by PKS because of its more limited inferential power. As mentioned above, we would not be so concerned if complex combinatorial reasoning was required to
1
The function combo() acts as a run-time variable in the sense
of (Etzioni, Golden, and Weld 1997).
KR 2004
613
discover these plans. However, some of these plans are quite
natural. In this paper we present a collection of techniques
for extending the inferential and representational power of
PKS so that it can find more of these types of plans. The features we have added include extensive support for numbers,
so that PKS can generate plans that deal with resources; a
postdiction procedure so that PKS can extract more knowledge from its plans (Sandewall 1994); and a temporal goal
language, so that PKS can plan for “hands-off,” “restore,”
and other temporal goals (Weld and Etzioni 1994). With
these techniques, all fully implemented in the new version
of PKS, our planner can solve a wider and more interesting
range of planning problems. More importantly, these techniques help us understand more fully the potential of the
“knowledge-level” approach to planning under incomplete
knowledge and sensing.
The rest of the paper is organized as follows. First, we
present a short recap of the knowledge-based approach to
planning embodied in the PKS system. Then, we discuss the
new techniques we have developed to enhance PKS. A series
of planning examples are then presented to help demonstrate
the effectiveness of the PKS system and these techniques in
general.
PKS
PKS (Planning with Knowledge and Sensing) is a
knowledge-based planner that is able to construct conditional plans in the presence of incomplete knowledge (Petrick and Bacchus 2002). The PKS framework is based on a
generalization of S TRIPS . In S TRIPS , the state of the world
is represented by a database and actions are represented as
updates to that database. In PKS, the agent’s knowledge
(rather than the state of the world) is represented by a set
of databases and actions are represented as updates to these
databases. Thus, actions are modelled as knowledge-level
modifications to the agent’s knowledge state, rather than as
physical-level updates to the world state.
Modelling actions as database updates leads naturally to
a simple forward-chaining approach to finding plans that is
both efficient and effective (see (Petrick and Bacchus 2002)
for empirical evidence). The computational efficiency of
this approach is the result of restricting the types of knowledge that can be expressed, and by limiting the power of
the inferential mechanism. In particular, only certain fixed
types of disjunctive knowledge can be represented and the
inferential mechanism is incomplete.
PKS uses four databases to represent an agent’s knowledge, the semantics of which is provided by a translation to
formulas of a first-order modal logic of knowledge (Bacchus
and Petrick 1998). Thus, any configuration of the databases
corresponds to a collection of logical formulas that precisely characterizes the agent’s knowledge state. The four
databases used are as follows.
Kf : The first database is like a standard S TRIPS database,
except that both positive and negative facts are allowed and
the closed world assumption is not applied. Kf can include
any ground literal, `; ` ∈ Kf means that we know `. Kf can
also contain knowledge of function values.
614
KR 2004
Kw : The second database is designed to address plan-time
reasoning about sensing actions. If the plan contains an action to sense a fluent f , at plan time all that the agent will
know is that after it has executed the action it will either
know f or know ¬f . At plan time the actual value of f
remains unknown. Hence, φ ∈ Kw means that the agent either knows φ or knows ¬φ, and that at execution time this
disjunction will be resolved.
Kw plays a particularly important role when generating
conditional plans. In a conditional plan one can only branch
on “know-whether” facts. That way we are guaranteed that
at execution time the agent will have sufficient information,
at that point in the plan’s execution, to determine which plan
branch to follow. This guarantee satisfies one of the important conditions for plan correctness in the context of incomplete knowledge put forward in (Levesque 1996).
Kv : The third database stores information about function
values that the agent will come to know at execution time.
Kv can contain any unnested function term whose value is
guaranteed to be known to the agent at execution time. Kv
is used for the plan time modelling of sensing actions that
return numeric values. For example, size(paper.tex) ∈ Kv
means the agent knows at plan time that the size of paper.tex
will become known at execution time.
Kx : The fourth database contains a particular type of disjunctive knowledge, namely “exclusive-or” knowledge of
literals. Entries in Kx are of the form (`1 |`2 | . . . |`n ), where
each `i is a ground literal. Such a formula represents knowledge of the fact that “exactly one of the `i is true.” Hence, if
one of these literals becomes known, we immediately come
to know that the other literals are false. Similarly, if n − 1 of
the literals become false we can conclude that the remaining
literal is true. This form of incomplete knowledge is common in many planning scenarios.
Actions in PKS are represented as updates to the databases
(i.e., updates to the agent’s knowledge state). Applying an
action’s effects simply involves adding or deleting the appropriate formulas from the collection of databases. An inference algorithm examines the database contents and draws
conclusions about what the agent does and does not know or
“know whether” (Bacchus and Petrick 1998). The inference
algorithm is efficient, but incomplete, and is used to determine if an action’s preconditions hold, what conditional effects of an action should be activated, and whether or not a
plan achieves the stated goal.
For instance, consider a scenario where we have a bottle
of liquid, a healthy lawn, and three actions: pour-on-lawn,
drink, and sense-lawn,2 specified in Table 1. Intuitively,
pour-on-lawn pours some of the liquid on the lawn with
the effect that if the liquid is poisonous, the lawn becomes
dead. In our action specification, pour-on-lawn has two conditional effects: if it is not known that ¬poisonous holds,
then ¬lawn-dead will be removed from Kf (i.e., the agent
will no longer know that the lawn is not dead); if it is known
that poisonous holds, then lawn-dead will be added to Kf
(i.e., the agent will come to know that the lawn is dead).
Drinking the liquid (drink) affects the agent’s knowledge of
2
This example was communicated to us by David Smith.
Action
pour-on-lawn
drink
sense-lawn
pour-on-lawn-2
Pre
Effects
¬K(¬poisonous) ⇒
del (Kf , ¬lawn-dead)
K(poisonous) ⇒
add (Kf , lawn-dead)
¬K(¬poisonous) ⇒
del (Kf , ¬poisoned)
K(poisonous) ⇒
add (Kf , poisoned)
add (Kw , lawn-dead)
¬K(¬poisonous2) ⇒
del (Kf , ¬lawn-dead)
K(poisonous2) ⇒
add (Kf , lawn-dead)
Table 1: Actions in the poisonous liquid domain
being poisoned in a similar way. Finally, sense-lawn senses
whether or not the lawn is dead and is represented as the
update of adding lawn-dead to Kw .
If Kf initially contains ¬lawn-dead, and all of the other
databases are empty, executing pour-on-lawn yields a state
where ¬lawn-dead has been removed from Kf —the agent
no longer knows that the lawn is not dead. If we then execute
sense-lawn we will arrive at a state where Kw now contains
lawn-dead—the agent knows whether the lawn is dead. This
forward application of an action’s effects provides a simple
means of evolving a knowledge state, and it is the approach
that PKS uses to search over the space of conditional plans.
In PKS, a conditional plan is a tree whose nodes are labelled by a knowledge state (a set of databases), and whose
edges are labelled by an action or a sensed fluent. If a node
n has a single child c, the edge to that child is labelled by an
action a whose preconditions must be entailed by n’s knowledge state. The label for the child c (c’s knowledge state) is
computed by applying a to n’s label. A node n can also have
two children, in which case each edge is labelled by a fluent F , such that Kw (F ) is entailed by n’s knowledge state
(i.e., the agent must know-whether the fluent that the plan
branches on). In this case, the label for one child is computed by adding F to n’s Kf database, and the label for the
other child by adding ¬F to n’s Kf database.
An existing plan may be extended by adding a new action (i.e., a new child) or a new branch (i.e., a new pair of
children) to a leaf node. The inference algorithm computes
whether or not an extension can be applied, generates the
effects of the action or branch, and tests if the new nodes
satisfy the goal; no leaf is extended it if already achieves the
goal. The search terminates when a conditional plan is found
in which all the leaf nodes achieve the goal. Currently, PKS
performs only undirected search (i.e., no search control), but
it is still able to solve a wide range of interesting problems
(Petrick and Bacchus 2002).
Extensions to the PKS framework
Postdiction: Although PKS’s forward-chaining approach
is able to efficiently generate plans, there are situations
where the resulting knowledge states fail to contain some
“intuitive” conclusions. For instance, say we execute the sequence of actions hpour-on-lawn; sense-lawni (Table 1) in
an initial state where the lawn is alive, and then come to
know that the lawn is dead. An obvious additional conclusion is that the liquid is poisonous. Similarly, if the lawn
remained alive, we can conclude that the liquid is not poisonous. By reasoning about these two possible outcomes
at plan time, prior to executing the plan, we should be able
to conclude that the plan not only achieves Kw knowledge
of lawn-dead, but that it also achieves Kw knowledge of
poisonous.
It should be noted that a conclusion such as poisonous
requires a non-trivial inference. Inspecting the states that
result from the action sequence hpour-on-lawn; sense-lawni
reveals that neither poisonous nor ¬poisonous follows from
the individual actions executed: pour-on-lawn provides no
information about whether or not it changed the state of the
lawn, so we cannot know if poisonous holds after the action
is executed. Similarly, sense-lawn simply returns the status
of the lawn; by itself it says nothing about how the lawn
became dead. Further evidence that a non-trivial inference
process is at work is provided when we consider our knowledge that in the initial state ¬lawn-dead holds. It is not hard
to see that without this knowledge the conclusion poisonous
is not justified.
We can capture these kinds of additional inferences at
plan time by examining action effects and non-effects. Consider the two possible outcomes of sense-lawn in the action sequence hpour-on-lawn; sense-lawni: either it senses
lawn-dead or it senses ¬lawn-dead. If we treat each outcome separately we can consider two sequences of actions,
one for each outcome of lawn-dead. Each action sequence
produces three world states: W0 the initial world, W1 the
world after executing pour-on-lawn, and W2 the world after
executing sense-lawn.
In the first sequence, we know that ¬lawn-dead holds
in W0 and that lawn-dead holds in W2 . Reasoning backwards we see that sense-lawn does not change the status of
lawn-dead. Hence, lawn-dead must have held in W1 . But
since ¬lawn-dead held in W0 and lawn-dead held in W1 ,
pour-on-lawn must have produced a change in lawn-dead.
Since lawn-dead is only altered by a conditional effect of
pour-on-lawn, it must be the case that the antecedent of the
condition, poisonous, was true in W0 when pour-on-lawn
was executed. Furthermore, poisonous is not affected by
pour-on-lawn, nor by sense-lawn. Hence, poisonous must
be true in W1 as well as in W2 .
Similarly, in the second sequence ¬lawn-dead holds in
both W0 and W2 . At the critical step we conclude that
since ¬lawn-dead holds in W0 as well as W1 , pour-on-lawn
did not alter lawn-dead, and hence the antecedent of its
conditional effect must have been false in W0 . That is,
¬poisonous must have been true in W0 . Since ¬poisonous
is not changed by the two actions, it must also be true in the
final state of the plan.
Hence, irrespective of the actual outcome of executing the
plan, the agent will arrive in a state where it either knows
poisonous or knows ¬poisonous, and so, we can conclude
that the plan allows us to know-whether poisonous. It should
KR 2004
615
also be noted that all of the inferences described above provide updates to the agent’s current knowledge state, that is,
the agent’s knowledge state arising from applying a given
action sequence. For instance, the addition of poisonous or
¬poisonous to W0 can only be made after the sequence of
actions hpour-on-lawn; sense-lawni is performed. Thus, we
make a distinction between the agent’s knowledge of W0
after applying hpour-on-lawn; sense-lawni (i.e., where the
agent knows whether poisonous is true or not), compared
with the agent’s knowledge of the initial W0 that we began
with (i.e., where no actions have been performed and the
agent did not know whether poisonous is true or not). In
other words, the agent’s knowledge maintains the most recent information about each state in the plan.
The inferences employed above are examples of postdiction (Sandewall 1994). Although the individual inferences
are fairly simple, taken together they can add significantly to
the agent’s ability to deal with incompletely known environments. A critical element in these inferences is the Markov
assumption as described in (Golden and Weld 1996): first,
we must assume that we have complete knowledge of action
effects and non-effects (our incomplete knowledge comes
from a lack of information about precisely what state we
are in when we apply the action); second, we must assume that the agent’s actions are the only source of change
in the world. The first assumption is not restrictive, since
action non-determinism can always be converted into nondeterminism about the state in which it is being executed
(Bacchus, Halpern, and Levesque 1999). The second assumption is more restrictive, however, and needs to be examined carefully when dealing with other agents (or nature)
that could be altering the world concurrently.
In PKS, reasoning about these kinds of inferences is
implemented by manipulating linearizations of the treestructured conditional plan. Each path to a leaf becomes
a linear sequence of states and actions: the states and actions visited during that particular execution of the plan. The
number of linearizations is equal to the number of leaves in
the conditional plan, so only a linear amount of extra space
is required to convert the condition plan (tree) into a set of
linear plans (the branches of the tree). Each path differs from
other paths in the manner in which the agent’s know-whether
knowledge resolves itself during execution and in the manner in which that resolution affects the actions the agent subsequently executes. For each linear sequence, we apply a set
of backward and forward inferences to draw additional conclusions along that sequence. When new branches are added
to the conditional plan, new linearizations are incrementally
constructed and the process is repeated.
Let W be a knowledge state in a linear sequence, W + be
its successor state, and a be the label of the edge from W to
W + . The inference rules we apply are:
1) If a cannot make φ false (e.g., φ is unrelated to any of
the facts a makes true), then if φ becomes newly known in
W make φ known in W + . Similarly, if a cannot make φ
true, then if φ becomes newly known in W + make φ known
in W . In both cases a cannot have changed the status of φ
between the two worlds W and W + .
2) If φ becomes newly known in W and a has the conditional
616
KR 2004
effect φ → ψ, make ψ known in W + . ψ must be true in W +
as either it was already true or a made it true.
3) If a has the conditional effect φ → ψ and it becomes
newly known that ψ holds in W + and ¬ψ holds in W , make
φ known in W . It has become known that a’s conditional
effect was activated, so the antecedent of this effect must
have been true.
4) If a has the conditional effect φ → ψ and it becomes
newly known that ¬ψ holds in W + , make ¬φ known in W .
It has become known that a’s conditional effect was not activated, so the antecedent of this effect must have been false.
Although these rules are easily shown to be sound under
the assumption that we have complete information about a’s
effects, they are too general to implement efficiently. In particular, PKS achieves its efficiency by restricting disjunctions
and, hence, we cannot use these rules to infer arbitrary new
disjunctions.
To avoid this problem, we restrict φ and ψ to be literals, and further require that our actions cannot add or delete
a fluent F with more than one conditional effect. For example, an action cannot contain the two conditional effects
a → F and b → F .3 These restrictions do not prohibit φ and
ψ from being parameterized, provided such parameters are
among the parameters of the action. In certain cases, we can
apply these rules to more complex formulas, without producing general disjunctions; implementing these extensions
remains as future work.
A conditional plan is updated by applying these inference
rules to each linearization of the plan. To test whether or not
one of the inference rules should be applied, the standard
PKS inference algorithm is used to test the rule conditions
against a given state in the plan. Thus, testing the inference
rules has the same complexity as evaluating whether or not
an action’s preconditions hold. A successful application of
one of the inference rules might allow other rules to fire.
Nevertheless, even in the worst case we can still run the rules
to closure (i.e., to a state where no rule can be applied) fairly
efficiently.
Proposition 1 On a conditional plan with n leaves and
maximum height d, at most O(nd2 ) tests of rule applicability need be performed to reach closure.
In practice, we have found that the number of effects applied
at each state is often quite small.
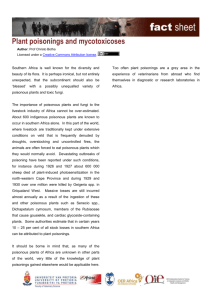
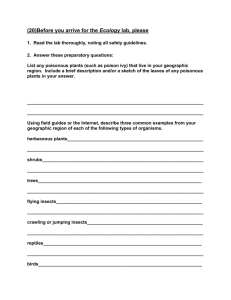
We illustrate the operation of our postdiction algorithm on
the conditional plan hpour-on-lawn; sense-lawni, followed
by a branch on knowing whether lawn-dead. This plan is
shown at the top of Figure 1, along with the contents of
the databases. The two linearizations of the plan are shown
in (a) and (b). Applying the new inference rules produces
the additional conclusions shown in bold; the number following the conclusion indicates the rule that was applied in
each case. The net result is that we have proved that in every outcome of the plan the agent either knows poisonous
3
If this was allowed, rule 3 above would be invalid. The correct
inference from knowing ¬F in W and F in W + would be a ∨ b,
which is a disjunction. This observation was pointed out to us by
Tal Shaked.
or knows ¬poisonous, i.e., the plan achieves know-whether
knowledge of poisonous.
Conditional plan:
Kf: lawn−dead
(a)
pour−on−lawn
Situation calculus encoding: We have also shown our
new inference rules to be sound, with respect to an encoding in the language of the situation calculus. The situation calculus ((McCarthy 1963), and as presented in (Reiter
2001)) is a first-order language, with some second-order features, specifically designed to model dynamically changing
worlds. A first-order term called a situation is used to represent a sequence of actions, also known as a possible world
history. Predicates and functions are extended so that their
values may be referenced with respect to a particular situation; the values of such fluents are permitted to change from
situation to situation. Actions provide the means of change
in a domain, and when applied to a given situation, generate
a successor situation. A knowledge operator added to the
basic language (Scherl and Levesque 2003) allows a formal
distinction to be made between fluents that are true of a situation and fluents that are known to be true of a situation.
Since a situation term denotes a history of action, it provides
a temporal component that indexes all assertions made about
the agent’s knowledge.
Any planning problem represented by PKS can be recast
formally in the language of the situation calculus. By doing
so, we have been able to verify that the conclusions made by
our inference rules are always entailed by an encoded theory, thus establishing the soundness of our inference rules.
Furthermore, we have confirmed the soundness for a generalized version of our rules, rather than the restricted set of
rules we implemented in PKS. For instance, since the situation calculus is a general first-order language, the inferences
that generated disjunctions in rule 3 (and could not be represented in PKS) can be shown to be correct.
Our situation calculus encoding also allows us to correctly make the necessary formal distinction between what
an agent knows about the previous state when it is in its
current state, and what the agent knew about its previous state when it was in its previous state. In particular, in the situation calculus Knows(F (prev(s)), s) and
Knows(F (prev(s)), prev(s)) are distinct pieces of knowledge. Knows(F (prev(s)), s) indicates that in situation s
(now) it is known that F was true in the previous situation
(prev(s)). Knows(F (prev(s)), prev(s)) on the other hand
indicates that in the previous situation F is known to be true
in that situation.
In conditional plans, when we reach a particular state as
a result of having our sensing turn out a particular way, it is
possible for us to know more now about the previous state
than we did when we were in the previous state. Our inference rules are used to update our knowledge of the previous states so that knowledge is described with respect to the
states labelling the leaf nodes in the conditional plan. Thus,
the knowledge states represented in the conditional plans are
always referenced with respect to s rather than with respect
to prev(s). Since the previous actions and outcomes leading up to a leaf node are fixed, we can never lose knowledge about the past. That is, we can never have the case
that Knows(F (prev(s)), prev(s)) holds when we don’t have
Kf:
sense−lawn
branch on
lawn−dead
Kw: lawn−dead
lawn−dead
(b)
Kf:
lawn−dead
Linearization of conditional branches:
(a)
pour−on−lawn
Kf: lawn−dead
Kf: poisonous (3)
(b)
Kf:
Kf:
sense−lawn
Kf: lawn−dead (1)
Kf: poisonous (1)
pour−on−lawn
lawn−dead
Kf:
poisonous (4) Kf:
Kf: lawn−dead
Kf: poisonous (1)
sense−lawn
lawn−dead (1) Kf:
poisonous (1) Kf:
lawn−dead
poisonous (1)
Figure 1: Postdiction in the poisonous liquid domain
that Knows(F (prev(s)), s) also holds. Instead, the agent’s
knowledge about its past states is always non-decreasing,
and the agent cannot lose knowledge about the past when
the new inference rules are applied.
Temporally extended goals: Consider again the plan illustrated in Figure 1. If we apply the postdiction algorithm
as in branch (a), we can not only infer that poisonous held
in the final state of the execution, but also that it held in
the initial state. As we discussed above, postdiction can potentially update the agent’s knowledge of any of the states
visited by the plan. In other words, along this execution
branch we can conclude that the liquid must have initially
been poisonous. Similarly, along branch (b), we conclude
that ¬poisonous held in the initial state. Thus, at plan time
we could also infer that the conditional plan achieves knowwhether knowledge of whether poisonous initially held.
Often, these kinds of temporally-indexed conclusions are
needed to achieve certain goals. For instance, restore goals
require that the final state returns a condition to the status it
had in the initial state (Weld and Etzioni 1994). We might
not know the initial status of a condition and, hence, it may
be difficult for the planner to infer that a plan does in fact
restore this status. However, with additional reasoning (as
in the above example), we may be able to infer the initial
status of the condition, and thus be in a position to ensure a
plan properly restores it.
Since our postdiction algorithm requires the ability to inspect and augment any knowledge state in a conditional
plan’s tree structure, the infrastructure is already in place
to let us solve more complex types of temporal goals that
reference states other than the final state.
In PKS, goals are constructed from a set of primitive
queries (Bacchus and Petrick 1998) that can be evaluated
by the inference algorithm at a given knowledge state. A
primitive query Q is specified as having one of the following forms: (i) K(`): is a ground literal ` known to be true?
(ii) Kval(t): is term t’s value known? (iii) Kwhe(`): do we
“know whether” a literal `? Our enhancements to the goal
language additionally allow a query Q to specify one of the
following temporal conditions:
1. QN : the query must hold in the final state of the plan,
KR 2004
617
2. Q0 : the query must hold in the initial state of the plan, or
3. Q∗ : the query must hold in every state that could be visited by the plan.
Conditions of type (1) can be used to express classical goals
of achievement. Type (2) conditions allow, for instance, restore goals to be expressed. Conditions of type (3) can be
used to express “hands-off” or safety goals (Weld and Etzioni 1994).
Finally, we can combine queries into arbitrary goal formulas that include disjunction,4 conjunction, negation, and
a limited form of existential and universal5 quantification.
When combined with the postdiction algorithm of the previous section, a goal is satisfied in a conditional plan provided
it is satisfied in every linearization of the plan.
For instance, the plan in Figure 1 satisfies the goal
Kwhe0 (poisonous) ∧ KwheN (poisonous), i.e., we know
whether poisonous is true or not in both the initial state
and the final state of each linearization of the plan. The
same plan also satisfies the stronger, disjunctive goal
(K 0 (poisonous) ∧ K N (poisonous)) ∨ (K 0 (¬poisonous) ∧
K N (¬poisonous)). In this case, linearization (a) satisfies
K 0 (poisonous) ∧ K N (poisonous), linearization (b) satisfies
K 0 (¬poisonous)∧K N (¬poisonous), and so the conditional
plan satisfies the disjunctive goal. Finally, the plan also satisfies the goal Kwhe∗ (poisonous) since we know whether
poisonous is true or not at every knowledge state of the plan.
Numerical evaluation: Many planning scenarios require
the ability to reason about numbers. For instance, constructing plans to manage limited resources or satisfy certain numeric constraints requires the ability to reason about arithmetic expressions. To increase our flexibility to generate
plans in such situations, we have introduced numeric expressions into PKS. Currently, PKS can only deal with numeric
expressions containing terms that can be evaluated down to
a number at plan time; expressions that can only be evaluated at execution time are not permitted. For example,
a plan might involve filling the fuel tank of a truck t1 . If
the numeric value of the amount of fuel subsequently in the
tank, fuel(t1 ), is known at plan time, PKS can use fuel(t1 )
in further numeric expressions. However, if the amount of
fuel added is known only at run time, so that PKS only Kv ’s
fuel(t1 ) but does not know how to evaluate it at plan time,
then it cannot use fuel(t1 ) in other numeric expressions.
Even though PKS can only deal with numeric expressions
containing known terms, these expressions can be very complex: they are a subset of the set of expressions of the C language. Specifically, numeric expressions can contain all of
the standard arithmetic operations, logical connective operators, and limited control structures (e.g., conditional evaluations and simple iterative loops). Temporary variables may
also be introduced into calculations of an expression.
4
As in the approach of (Petrick and Levesque 2002), disjunctions outside the scope of knowledge operators are not problematic.
5
Queries containing universal quantifiers are currently restricted to quantify over the set of known objects, rather than the
set of all objects in the domain.
618
KR 2004
Numeric expressions can also be used in queries, and we
can update our databases with a formula containing numeric
terms. For instance, a numeric term resulting from a queried
expression can be utilized in additional calculations and then
added to a database as an argument of a new fact. The only
restriction, as noted above, is that PKS must be able to evaluate these expressions down to a specific numeric value before they are used to query or update the databases. Nevertheless, as we will demonstrate in the planning problems
presented below, even with this restriction, the numeric expressions we allow are still very useful in modelling a variety of planning problems.
Exclusive-or knowledge of function values: PKS has a
Kx database for expressing “exclusive-or” knowledge. A
particularly useful case of exclusive-or knowledge arises
when a function has a finite and known range. For example, the function f (x) might only be able to take on one of
the values hi, med, or lo. In this case, we know that for every value of x we have (f (x) = hi|f (x) = med|f (x) = lo).
Previously, PKS could not represent such a formula in its Kx
database, as the formula contains literals that are not ground.
Because finite valued functions are so common in planning
domains, we have extended PKS’s ability to represent and
reason with this kind of knowledge.
We can take advantage of this additional knowledge in
two ways. First, we can utilize this information to reason
about sets of function values and their inter-relationship.
For example, say that g(x) has range {d1 |d2 | . . . |dm } while
f (x) has range {d1 |a1 | . . . |am }. Then, from f (c) = g(b)
we can conclude that f (c) = g(b) = d1 .6 Second, we
have added the ability to insert multi-way branches into a
plan when we have Kv knowledge of a finite-range function.
In such situations, the planner will try to construct a plan
branch for each of the possible mappings of the function.
For instance, in the open safe example it might be the case
that we know the set of possible combinations. Such knowledge could be specified by including the formula combo() =
(c1 |c2 | . . . |cn ) in our extended Kx database. In any plan
state where combo() ∈ Kv (we know the value of the combination) we could immediately complete the plan with an
n-way branch on the possible values of combo, followed by
the action dial(ci ) to achieve an open safe along the i-th
branch.
Planning problems
We now illustrate the extensions made to PKS with a series
of planning problems. Our enhancements have allowed us
to experiment with a wide range of problems PKS was previously unable to solve. We also note again that even though
our planner employs blind search to find plans it is still able
to solve many of the examples given below in times that are
less than the resolution of our timers (1 or 2 milliseconds).
Poisonous liquid: When given the actions specified in Table 1, PKS can immediately find the plan hpour-on-lawn,
sense-lawni to achieve the goal Kwhe0 (poisonous) ∧
6
Constants that are syntactically distinct denote different objects in the domain.
Conditional plan:
Kf: lawn−dead
(a)
pour−on−lawn
Kf:
pour−on−lawn−2
sense−lawn
branch on
lawn−dead
Kw: lawn−dead
lawn−dead
Action
paint(x)
sense-colour
lawn−dead
Table 2: Painted door action specification
Linearization of conditional branches:
Kf:
(b)
Kf:
Kf:
Kf:
pour−on−lawn
lawn−dead
pour−on−lawn
lawn−dead
Kf:
poisonous2 (1) Kf:
poisonous (4) Kf:
pour−on−lawn−2
sense−lawn
Kf: lawn−dead (1)
pour−on−lawn−2
lawn−dead (1) Kf:
poisonous2 (4) Kf:
poisonous (1) Kf:
Effects
add (Kf , door-colour() = x)
add (Kv , door-colour())
(b)
Kf:
(a)
Pre
K(colour(x))
Action
dial(x)
Kf: lawn−dead
sense−lawn
lawn−dead (1) Kf:
poisonous2 (1) Kf:
poisonous (1) Kf:
lawn−dead
poisonous2 (1)
poisonous (1)
Pre
Effects
add (Kw , open)
del (Kf , ¬open)
K(combo() = x) ⇒
add (Kf , open)
Table 3: Open safe action specification
Figure 2: Poisonous liquid domain with two liquids
KwheN (poisonous) (knowing whether poisonous held in
both the initial and final states). It is also able to find
the same plan when given the goal (K 0 (poisonous) ∧
K N (poisonous)) ∨ (K 0 (¬poisonous) ∧ K N (¬poisonous)),
as well as the goal Kwhe∗ (poisonous).
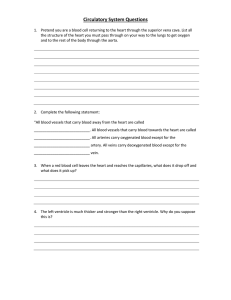
An interesting variation of the poisonous liquid domain
includes the addition of the action pour-on-lawn-2 (see Table 1). pour-on-lawn-2 has the effect of pouring a second
unknown liquid onto the lawn; its effects are similar to those
of pour-on-lawn: the second liquid may be poisonous (represented by poisonous2) and, thus, kill the lawn. When presented with the conditional plan shown at the top of Figure 2,
PKS is able to construct the linearizations (a) and (b), and
augment the databases with the conclusions shown in bold
in the figure. This plan is useful for illustrating our postdiction rules. In (a), since pour-on-lawn-2 and pour-on-lawn
both have conditional effects involving lawn-dead, we cannot make any additional conclusions about lawn-dead across
these actions. As a result, no further reasoning rules are applied. This reasoning is intuitively sensible: the agent is
unable to determine which liquid killed the lawn and, thus,
cannot conclude which of the liquids is poisonous. (The
disjunctive conclusion that one of the liquids is poisonous
cannot be represented by PKS). In (b), after applying the
inference rules we are able to establish that ¬lawn-dead,
¬poisonous, and ¬poisonous2 must hold in each state of the
plan. Again these conclusions are intuitive: after sensing
the lawn and determining that it is not dead, the agent can
conclude that neither liquid is poisonous.
It should be noted that planners that represent sets of possible worlds (and thus deal with disjunction) are also able
to obtain the conclusions obtained from our postdiction algorithm in the above examples (and some further disjunctions as well). In particular, these examples are all propositional, and do not utilize PKS’s ability to deal with nonpropositional features. What does pose a problem for many
of these planners, however, is their inability to infer the
temporally-indexed conclusions necessary to verify the temporal goal conditions; planners that only maintain and test
the final states of a plan will be unable to establish the required conclusions.
Painted door: In the painted door domain we have the
two actions given in Table 2. paint(x) changes the colour
of the door door-colour() to an available colour x, while
sense-colour senses the value of door-colour(). Our goal is
a “hands-off” goal of coming to know the colour of the door
while ensuring that the colour is never changed by the plan.
This can be expressed by the temporally-extended formula
(∃x)K ∗ (door-colour() = x).
Initially, the agent knows that the door is one of two
possible colours, c1 or c2 , represented by the formula
door-colour() = {c1 |c2 } in the Kx database.7 During
its search, PKS finds the single-step plan hsense-colouri.
This action has the effect of adding door-colour() to the
Kv database, indicating that the value of door-colour() is
known. Using this information, combined with its Kx
knowledge of the possible values for door-colour(), PKS
can construct a two-way branch that allows it to consider
the possible mappings of door-colour(). Along one branch
the planner asserts that door-colour() = c1 ; along the other
branch it asserts that door-colour() = c2 . Since sensecolour does not change door-colour(), after applying the
postdiction algorithm we are able to conclude along each
linearization that the value of door-colour() is the same in
every state. In each linearization door-colour() has a different value in the initial state, but its value agrees with its
value in the final state. Thus, we can conclude that the plan
achieves the goal.
Note that if PKS examines a plan like hpaint(c1 )i it will
not know the value of door-colour() in the initial state. Since
paint changes the value of door-colour(), our postdiction
algorithm will not allow facts about door-colour() to be
passed back through the paint action. Thus, PKS cannot conclude that door-colour() remains the same throughout the
plan, and so plans involving paint are rejected as not achieving the goal.
Opening a safe: Another interesting problem for PKS is
the open safe problem. In this problem we consider a safe
with a fixed number of known, possible combinations. In
the initial state we know that the safe is closed and that one
of the combinations will open the safe (represented as Kx
knowledge). The actual combination is denoted by the 0-ary
7
Any finite set of known colours will also work.
KR 2004
619
Action
dial(x)
Pre
Effects
add (Kw , open)
del (Kf , ¬open)
add (Kf , justDialled() = x)
K(combo() = x) ⇒
add (Kf , open)
Domain specific update rules
K(open) ∧ K(justDialled() = x) ⇒
add (Kf , combo() = x)
K(¬open) ∧ K(justDialled() = x) ⇒
add (Kf , combo() 6= x)
Table 4: Open safe domain (Petrick and Bacchus 2002)
function, combo(). There is one action, dial(x), which dials
a combination x on the safe. dial has the effect of sensing
whether or not the safe becomes open. If the combination
dialled is known to be the combination of the safe, then it
will become known that the safe is open. The action specification for dial is given in Table 3.
After a dial(ci ) action is performed (where ci is some
combination), the planner is able to form a conditional
branch on knowing-whether open. Along one branch the
planner asserts that open is known to be true. Since dial
changes the value of open, postdiction can conclude that
dial’s conditional effect must have been applied, and so,
combo() = ci must hold in the initial state. Since combo
is not changed by dial, then combo() = ci must also be true
in the state following the dial action. In this state, the goal
is satisfied: the safe is known to be open and ci is known to
be the combination of the safe. Along the other branch the
planner asserts that ¬open holds. Since ¬open is unchanged
by dial, it must be the case that dial’s conditional effect was
not applied, and so combo() 6= ci must hold in the initial
state. Again, since combo is unchanged by dial, it must be
the case that combo() 6= ci also holds in the state following
dial. The planner’s Kx knowledge of possible combinations
is then updated, and the planner can try another dial action
with a different combination.
An earlier PKS encoding of the open safe problem appeared in (Petrick and Bacchus 2002), and is shown in Table 4. The new inference rules, however, allow us to simplify this action specification. In our previous encoding,
we required a special function, justDialled(), to explicitly
track each combination ci that was dialled. A pair of domain specific update rules8 was then used to assert whether
combo() = ci was true or not, depending on whether or not
the safe was known to be open. Since postdiction automatically generates such conclusions from our action specification, we no longer require the extra function and update rules
in our encoding.
UNIX
UNIX
domain: Our final examples are taken from the
domain. The actions for the first example are given
8
Update rules are simply a convenient way of specifying additional action effects that might apply to many different actions
(Petrick and Bacchus 2002). Update rules are checked and conditionally fired after an action is applied or a plan branch is added.
620
KR 2004
Action
cd(d)
Pre
Effects
K(dir(d))
add(Kf , pwd() = d)
K(indir(d, pwd())
cd-up(d) K(dir(d))
add(Kf , pwd() = d)
K(indir(pwd(), d)
ls(f, d)
K(pwd() = d)
add(Kw , indir(f, d))
K(file(f ))
¬Kw (indir(f, d))
Domain specific update rules
¬K(processed(f, d)) ∧ K(indir(f, d)) ∧ Kval(size(f, d)) ⇒
t = [(size-max() > size(f, d))? size-max() : size(f, d)],
add (Kf , size-max() = t),
add (Kf , count() = count() + 1),
add (Kf , processed(f, d))
¬K(processed(f, d)) ∧ K(indir(f, d)) ∧ ¬Kval(size(f, d)) ⇒
add (Kf , size-unk() = size-unk() + 1),
add (Kf , processed(f, d))
¬K(processed(f, d)) ∧ K(¬indir(f, d)) ⇒
add (Kf , processed(f, d))
Table 5:
UNIX
domain action specification (1)
in Table 5. A directory hierarchy is defined by the relation indir(x, y) (x is in directory y), the current working directory is specified by the 0-ary function pwd(), and there
are two actions for moving around in the directory tree:
cd(x) moves down to a sub-directory of pwd() and cd-up(x)
moves to the parent directory of pwd(). Finally, the third action, ls, can sense the presence of a file in pwd().
Initially, the planner has knowledge of the current directory, pwd() = root, and of the directory
tree’s structure: indir(icaps, root), indir(kr, root), and
indir(planning, icaps). The planner also has the initial
knowledge file(paper.tex) (a precondition of ls).
In this example we consider the situation where multiple
copies of the file paper.tex may exist, located in different
directories with possibly different sizes. We would like to
determine the number of instances of paper.tex that are in
the directory tree, as well as the size of the largest copy
(whose size is known). To do this, we introduce some additional functions. size(f, d) specifies the size of file f in
directory d, size-max() keeps track of the largest file size
that has been found, count() simply counts the number of
instances of paper.tex whose size is known, while size-unk()
counts the number of copies whose size is not known. Initially, we have that count(), size-max(), and size-unk() are
all known to be equal to zero.
Our domain encoding includes three domain specific update rules, rules that are conditionally fired in the initial
state, or after actions or branches have been added to the
plan. These rules handle the different cases when we have
not yet “processed” a directory d, i.e., checked it for the
presence of paper.tex. The first rule fires when paper.tex is in
a directory d and its size is known. In this case, we can compare the size, size(paper.tex, d) against the current maximum
size, size-max(), and update size-max() if necessary. count()
is also incremented. The second rule fires when paper.tex is
in a directory d but we don’t know its size. In this case
we simple increment size-unk(). Finally, the third rule fires
when paper.tex is not in a directory d. In this case, none
of the functions are changed. After any of the update rules
is fired, we mark directory d as being checked for paper.tex
(i.e., processed(paper.tex, d) becomes known).
Our goal is to know that we have processed each directory in the directory tree. In the first example, we consider
the case when we know the location and size of some copies
of paper.tex: indir(paper.tex, kr), indir(paper.tex, icaps),
size(paper.tex, kr) = 1024, and size(paper.tex, icaps) =
4096. Running PKS on this problem immediately produces the plan: hls(paper.tex, root);cd(icaps);cd(planning);
ls(paper.tex, planningi, following by a branch on knowingwhether indir(paper.tex, planning): in each branch we
branch again on knowing-whether indir(paper.tex, root).
The final plan has four leaf nodes. In each of these
terminal states, size-max() = 4096 and count() = 2.
The four branches of the plan track the planner’s incomplete knowledge of paper.tex being in the directories
root and planning: each final state represents one possible combination of knowing-whether indir(paper.tex, root)
and knowing-whether indir(paper.tex, planning). Moreover,
the value of the function size-unk() is appropriately updated in each of these states (by the second update rule).
For instance, along the branch where indir(paper.tex, root)
and indir(paper.tex, planning) holds, we would also know
size-unk() = 2. When ¬indir(paper.tex, planning) and
¬indir(paper.tex, root) is known, size-unk() = 0. The remaining two branches would each have size-unk() = 1.
PKS is also able to generate a plan if we don’t have any
information about the sizes or locations of paper.tex. In
this case, the plan performs an ls action in each directory
and produces a plan branch for each possibility of knowingwhether paper.tex is in that directory. With 4 directories to
check, PKS produces a plan with 24 = 16 branches. Our
blind depth-first version of the planner is able to find this
plan in 0.01 seconds; our breath-first version of PKS which
ensures the smallest plan is generated, is able to do so in
30.1 seconds.
One final extension to this example is the addition of a
goal that requires us to not only determine the size of the
largest instance of paper.tex, but also to move to the directory containing this file (provided we have found a file
whose size is known). To do this, we need simply add the additional “guarded” goal formula (∃d).K N (count() > 0) ⇒
K N (pwd() = d)∧ K N (size(paper.tex, d) = size-max())
to our goal list. If PKS has processed a file whose size is
known (i.e., count() > 0) then it also needs to ensure pwd()
matches the directory containing a file size of size-max() for
paper.tex. Otherwise, the goal is trivially satisfied.
Our second UNIX domain example uses the actions given
in Table 6. Initially, we know about the existence of certain
files and directories, specified by the file(f ) and dir(d) predicates; some of their locations, specified by the indir(f, d)
predicate; and that some directories are executable, specified by the exec(d) predicate. The action ls(d) senses the
executability of a directory d; chmod+x(d) and chmod-x(d)
respectively set and delete the executability of a directory;
and cp(f, d) copies a file f into directory d, provided the
directory is executable. The goal in this domain is to copy
Action
ls(d)
chmod+x(d)
chmod-x(d)
cp(f, d)
cp+ (f, d)
Table 6:
Pre
K(dir(d))
K(dir(d))
K(dir(d))
K(file(f ))
K(dir(d))
K(exec(d))
K(file(f ))
K(dir(d))
UNIX
Effects
add (Kw , exec(d))
add (Kf , exec(d))
add (Kf , ¬exec(d))
add (Kf , indir(f, d))
K(exec(d)) ⇒
add (Kf , indir(f, d))
add (Kw , indir(f, d))
domain action specification (2)
files into certain directories, while restoring the executability
conditions of these directories.
The planner is given the initial knowledge dir(icaps),
file(paper.tex), and ¬indir(paper.tex, icaps); the planner
has no initial knowledge of the executability of the directory icaps.
Our goal is that we come to know
indir(paper.tex, icaps) and that we restore the executability status of icaps (i.e., that exec(icaps) has the same value
at the end and the beginning of the plan). The value of
exec(icaps) may change during the plan, provided it is restored to its original value by the end of the plan.
PKS finds the conditional plan: ls(icaps); branch on
exec(icaps): if K(exec(icaps)) then cp(paper.tex, icaps),
otherwise
chmod+x(icaps);
cp(paper.tex, icaps);
chmod-x(icaps).
Since the executability of icaps is not known initially,
the ls action is necessary to sense the value of exec(icaps).
Postdiction establishes that this sensed value must also hold
in the initial state, since ls does not change the value of
exec. The second goal can then be established by testing
the initial value of exec(icaps) against its value in the final
state(s) of the plan. By reasoning about the possible values of exec(icaps), appropriate plan branches can be built to
ensure the first goal is achieved (the file is copied) and the
executability permissions of the directory are restored along
the branch where we had to modify these permissions.
We also consider a related example with a new version of the cp action, cp+ (also given in Table 6).
Unlike cp, cp+ does not require that the directory be
known to be executable, but returns whether or not
the copy was successful.
In this case PKS finds
the conditional plan: cp+ (paper.tex, icaps); branch on
indir(paper.tex, icaps): if K(indir(paper.tex, icaps)) do
nothing, otherwise chmod+x(icaps); cp(paper.tex, icaps);
chmod-x(icaps). In other words, PKS is able to reason from
cp+ failing to achieve indir(paper.tex, icaps) that icaps was
not initially executable.
Conclusions
Our extensions to the PKS planner have served to increase
both its representational and inferential power, enhancing
our ability to plan in a variety of new situations. These extensions have also served to demonstrate the utility of the
knowledge-based approach to planning under incomplete
KR 2004
621
knowledge. We are currently working on several further extensions; we briefly mention two of these extensions here.
The first enhancement is an improvement in our ability to
deal with unknown numeric quantities (e.g., we were unable to evaluate expressions that could not be reduced to a
number at plan time). Provided we have Kv knowledge of
all the numeric terms involved in an expression, we should
be able to track these (unevaluated) expressions and under
certain conditions introduce plan branches that allow us to
reason further using these expressions (e.g., when reasoning about the truth of an inequality such as f (a) < c we
could introduce conditional branches and reason about the
cases when f (a) < c and f (a) ≥ c). The second enhancement is a natural generalization to the type of reasoning performed in the painted door domain. Instead of constructing a plan with a multi-way branch for each possible
colour of the door, the planner could add a new assertion
door-colour() = c to Kf , where c is a new constant (essentially a Skolem constant). Our postdiction rules would then
conclude that door-colour() would be preserved no matter
what colour c represented, thus ensuring that the goal is
achieved even if the range of door colours is unknown or
infinite. We are making progress solving these problems,
and believe that the knowledge-based approach continues to
have great potential for building powerful planners that can
work under incomplete knowledge.
References
Anderson, C. R.; Weld, D. S.; and Smith, D. E. 1998. Extending
Graphplan to handle uncertainty & sensing actions. In Proceedings of the AAAI National Conference, 897–904.
Bacchus, F., and Petrick, R. 1998. Modeling an agent’s incomplete knowledge during planning and execution. In Proceedings
of the International Conference on Principles of Knowledge Representation and Reasoning (KR), 432–443.
Bacchus, F.; Halpern, J. Y.; and Levesque, H. J. 1999. Reasoning
about noisy sensors and effectors in the situation calculus. Artificial Intelligence 111:171–208.
Bertoli, P.; Cimatti, A.; Roveri, M.; and Traverso, P. 2001. Planning in nondeterministic domains under partial observability via
symbolic model checking. In Proceedings of the International
Joint Conference on Artificial Intelligence (IJCAI), 473–478.
Blum, A., and Furst, M. 1997. Fast planning through planning
graph analysis. Artificial Intelligence 90:281–300.
Brafman, R., and Hoffmann, J. 2003. Conformant planning via
heuristic forward search. In Workshop on Planning Under Uncertainty and Incomplete Information.
Bryant, R. E. 1992. Symbolic boolean manipulation with ordered
binary decision diagrams. ACM Computing Surveys 24(3):293–
318.
Etzioni, O.; Golden, K.; and Weld, D. 1997. Sound and efficient
closed-world reasoning for planning. Artificial Intelligence 89(1–
2):113–148.
Golden, K., and Weld, D. 1996. Representing sensing actions:
The middle ground revisited. In Proceedings of the International
Conference on Principles of Knowledge Representation and Reasoning (KR), 174–185.
Levesque, H. J. 1996. What is planning in the presence of sensing? In Proceedings of the AAAI National Conference, 1139–
1146. AAAI Press / MIT Press.
622
KR 2004
McCarthy, J. 1963. Situations, actions, and causal laws. Technical Report Memo 2, Stanford University. Reprinted in Marvin
Minsky, ed., 1968, Semantic Information Processing. MIT Press.
Moore, R. C. 1985. A formal theory of knowledge and action. In
Hobbs, J., and Moore, R. C., eds., Formal Theories of the Commonsense World. Norwood, NJ: Ablex Publishing Corp. 319–358.
Petrick, R., and Bacchus, F. 2002. A knowledge-based approach
to planning with incomplete information and sensing. In Proceedings of the International Conference on Artificial Intelligence
Planning and Scheduling (AIPS), 212–222.
Petrick, R., and Levesque, H. J. 2002. Knowledge equivalence
in combined action theories. In Proceedings of the International
Conference on Principles of Knowledge Representation and Reasoning (KR).
Reiter, R. 2001. Knowledge in Action: Logical Foundations for
Specifying and Implementing Dynamical Systems. MIT Press.
Sandewall, E. 1994. Features and Fluents, volume 1. Oxford
University Press.
Scherl, R. B., and Levesque, H. J. 2003. Knowledge, Action, and
the Frame Problem. Artificial Intelligence 144(1–2):1–39.
Weld, D., and Etzioni, O. 1994. The first law of robotics (a call
to arms). In Proc. of the AAAI National Conference, 1042–1047.