Electromechanical hysteresis and coexistent states in dielectric elastomers
advertisement

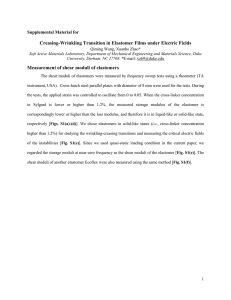
Electromechanical hysteresis and coexistent states in dielectric elastomers Xuanhe Zhao, Wei Hong and Zhigang Suoa School of Engineering and Applied Sciences, Harvard University, MA 02138 a email: suo@seas.harvard.edu Active polymers are being developed to mimic a salient feature of life: movement in response to stimuli1-6. Large deformation can lead to intriguing phenomena; for example, recent experiments have shown that a voltage can deform a layer of a dielectric elastomer into two coexistent states, one being flat and the other wrinkled7. This observation, as well as the needs to analyze large deformation under diverse stimuli, has led us to reexamine the theory of electromechanics. In his classic text, Maxwell8 showed that electric forces between conductors in a vacuum could be calculated using a field of stress in the vacuum. The Maxwell stress has since been invoked in deformable dielectrics theoretical foundation. 9-15 . This practice has been on an insecure Feynman16 remarked that differentiating electrical and mechanical forces inside a material was an unsolved problem and was probably unnecessary. Recently the theory of electromechanics has been reformulated17-19, circumventing the notion of the Maxwell stress. Here we further develop the theory to study the electromechanical instability. We show that the free energy of a typical dielectric elastomer is non-convex, such that homogenous deformation in a layer can become unstable and give way to coexistent states of two thicknesses. A region of the thin state has a large area, and wrinkles when constrained by nearby regions of 4/6/2007 1 the thick state. If the voltage is controlled to ramp, the elastomer may exhibit hysteresis, much like a ferroelectric. If the charge is controlled to ramp, the two states may coexist at a constant voltage, while the new state may grow at the expense of the old. The net flow of charge associated with the transition can be tuned, along with other characteristics of the coexistent states, by the degree of crosslink and the state of stress. While dielectric polymers exhibit diverse mechanisms of instability20, here we focus on electromechanical instability, assuming other mechanisms do not intervene. Stark and Garton21 noted that the breakdown fields of polymers reduced when the polymers became soft at elevated temperatures. These authors argued that the electric field caused the polymers to thin down, and instability occurred when the Maxwell stress exceeded the elastic stress. While this model has helped to interpret experiments7,22-24, it is unclear how the model will account for the coexistent states. We first consider an elastomer layer in a homogeneous state, loaded by a force P and a voltage Φ (Fig. 1). When the thickness changes by δl , the force does work Pδl . The volume of the elastomer in the reference state is AL . Consequently, the work done by the force in the current state divided by the volume of the elastomer in the reference state is sδλ , where s = P / A is the nominal stress, and λ = l / L is the stretch. The nominal stress is work-conjugate to the stretch. Analogously, when a small amount of charge δQ flows from one electrode to the other, the battery does work ΦδQ . Consequently, the work done by the battery in the ~ ~ current state divided by the volume of the elastomer in the reference state is EδD , where E = Φ / L is the nominal electric field, and D = Q / A is the nominal electric 4/6/2007 2 displacement. The nominal electric field is work-conjugate to the nominal electric displacement. The true electric field is defined as E = Φ / l , and the true electric displacement is defined as D = Q / a . Because ΦδQ = Elδ (Da ) = alEδD + EDlδa , the true electric field is not work-conjugate to the true electric displacement. Consequently, it is often convenient to formulate theories in terms of the nominal quantities. For incompressible ~ ~ materials, AL = al , so that E = E / λ and D = λD . ( ) ~ At a fixed temperature, let W λ , D be the free-energy function of the elastomer in the current state divided by the volume of the elastomer in the reference state. At constant P and Φ , the potential energy of the force and the battery are, respectively, − Pl and − ΦQ . The elastomer, the force and the battery constitute a composite system ( ) ~ with the free energy G = LAW λ , D − Pl − ΦQ . Thermodynamics dictates that the ~ ~ equilibrium values of λ and D should minimize G. Setting ∂G / ∂λ = 0 and ∂G / ∂D = 0 , we obtain that s= ∂W ( λ , D ) ∂λ E = , ∂W ( λ , D ) . ∂D (1) ( ) ~ To ensure that the state satisfying (1) indeed minimizes G, the surface W λ , D must be ( ) ~ above its tangent planes; that is, the function W λ , D must be convex. However, as we will show, using a specific material model, the free-energy function is typically nonconvex. Before we turn to the material model, we first outline consequences of a nonconvex free energy. In the absence of the external force, P = 0 and s = 0 , the first 4/6/2007 3 ( ) ~ equation in (1) gives a function λ D (Fig. 2a): The elastomer thins down as the charge increases. Under this iso-stress condition ( s = 0 ), the free energy of the elastomer ( ) (( ) ) ~ ~ ~ becomes a function of the nominal electric displacement, Wˆ D = W λ D , D . A ( ) ~ representative shape of the function Wˆ D is sketched in Fig. 2b. The function is convex ~ ~ for small and large D , but is concave for intermediate D . The physical origin of this shape will become clear when we examine the material model. Figure 2c sketches the free energy of the composite system of the elastomer and ( ) ~ ~~ ~ the battery, G / LA = Wˆ D − ED . Each curve corresponds to a prescribed E ; for a range ( ) ~ ~ of E , the non-convex Wˆ D gives rise to two local minima for G. The two minima have ~ the equal height at a particular nominal electric field, E * , so that the two sates may coexist in equilibrium. ~ ~ Figure 2d sketches the nominal electric field E = dWˆ / dD as the function of the ( ) ( ) ~ ~ ~ nominal electric displacement. Because Wˆ D is non-convex, its derivative, E D , is not monotonic. Analogous to Maxwell’s rule in the theory of phase transition, the nominal ~ electric field E * for coexistent states is at the level such that the two shaded regions in Fig. 2d have the equal area. Similar interpretation holds for instability in structures, such as the propagation of bulges along a cylindrical balloon and buckles along a pipe.25,26 To picture the physical origin of the non-convex free energy, we next prescribe a material model. For an isotropic elastic dielectric, the free energy is a function of the six invariants of the state of deformation and polarization9-11,17-19. An explicit functional form of such generality is unavailable for any real material. On the other hand, experiments suggest that, for many dielectric elastomers, the true electric displacement is 4/6/2007 4 linear in the true electric field, D = εE , with the permittivity ε being approximately independent of the state of deformation7,12-15. That is, the dielectric behavior of elastomers is similar to liquids. Motivated by this observation, we define an ideal dielectric elastomer by writing the free energy as the sum of the elastic energy W0 and the dielectric energy: W = W0 + D2 . 2ε (2) In writing (2), we have also assumed that the elastomer is incompressible. The term W0 is the elastic energy of an elastomer under no electric field; see reviews27,28. We adopt a series expression developed by Arruda and Boyce29 11 1 ⎡1 ⎤ W0 = μ ⎢ (I − 3) + I2 −9 + I 3 − 27 + ...⎥ , 2 1050 N 20 N ⎣2 ⎦ ( ) ( ) (3) where μ is the small-strain shear modulus, I is the sum of the square of principle stretches, and N is the number of rigid molecular segments in a polymer chain between crosslinks. Thus, 1/N measures the degree of crosslink. Expression (3) has been tested for diverse elastomers, large deformation, and many states of stress.28,29 We next apply our theory to the ideal dielectric elastomer. When the state of ~ ~ elastomer is described by two variables λ and D , recalling that D = λD and I = λ2 + 2λ−1 , we specialize (1) to ~ ~ dW0 λD 2 ~ λ2 D . s= + , E= dλ ε ε (4) In the expression for s, it is customary to call the first term the elastic stress and the second term the Maxwell stress. We will refrain from doing so because this separation 4/6/2007 5 results from an idealized material model (3); in general, the separation has no theoretical significance. Once again assume that the elastomer is subject to no external force, s = 0 . When N = ∞ , the degree of crosslink is low, and (3) recovers the neo-Hookean law, ( ) W0 (λ ) = μ (I − 3) / 2 = μ λ2 + 2λ−1 − 3 / 2 . Eq. (4) reduces to ~ −1 / 3 ⎛ D2 ⎞ ⎟ , λ = ⎜⎜1 + με ⎟⎠ ⎝ ~ ~ ~ −2 / 3 E D ⎛ D2 ⎞ ⎟ . ⎜1 + = μ /ε με ⎜⎝ με ⎟⎠ (5) ( ) ~ The function λ D is monotonic (Fig. 3a), as expected. Figure 3b shows that the function ( ) ~ ~ E D has a peak: the left side of the curve in Fig. 3b corresponds to a convex part of the free energy, and the right side corresponds to a concave part of the free energy. The true ( ) ~ ~ electric field is E = E / λ , and the function E D is monotonic (Fig. 3c). The peak ~ ~ nominal electric field is E peak ≈ 0.69 μ / ε , which occurs when D = 3εμ , λ ≈ 0.63 and E ≈ 1.1 μ / ε . The behavior sketched in these figures is qualitatively the same as that described by Stark and Garton21, even though the functional form in their paper is very different from (5). The model suggests that if a spot of the elastomer thins down to a critical thickness, the spot should thin down further without limit. The shape of the curve in Fig. 3b for the neo-Hookean material ( N = ∞ ), however, is an exception rather than a rule. When N is finite, multiple terms in (3) are ( ) ~ ~ needed, leading to a much stiffer behavior as λ → 0 . Figure 3b plots the function E D ( ) ~ ~ for several values of N. Below a critical value, N < 2.6 , the function E D is monotonic, and the elastomer is electromechanically stable for the full range of electric field. When 4/6/2007 6 ( ) ~ ~ 2.6 < N < ∞ , the function E D has the same shape as in Fig. 2d. This shape is expected for most commonly used dielectric elastomers, given the large range of N. Our theory can be extended to other loading conditions. As an illustration, let sP be the nominal stress applied biaxially in the plane of the elastomer layer. In terms of the through-thickness stretch λ , the in-plane stretch is λ−1 / 2 , so that the free energy becomes ( ) ~ ~~ G / LA = W λ , D − 2sP λ−1 / 2 − ED . For a fixed value of N and sP , the two coexistent states are subject to the same voltage, but have different true electric fields. In experiment, the true electric field in the thin state may exceed the electric breakdown strength. As show in Fig. 4, imposing a biaxial stress significantly reduces the true electric field in the thin state, and may enable the two states to coexist. Furthermore, for a given N, the electromechanical instability can be averted when the biaxial stress is large enough. These conclusions are consistent with the experimental observations7. In summary, we have specified a material model that is consistent with the available experimental data, and shown the free energy of commonly used dielectric elastomers is non-convex, leading to coexistent states and hysteresis in elastomer layers. The theory also directs attention to several topics ripe for exploration. While we have explained the coexistence of flat and wrinkled states, we have not included wrinkles explicitly in our theory. When molecular groups in an elastomer can polarize nearly as freely as in liquids, e.g., when the degree of crosslink is low and the deformation is well below the fully extended limit, the dielectric behavior of the elastomer is expected to be liquid-like. It will be interesting to investigate how well the ideal dielectric elastomer represents a real one. The large flow of charge associated with the change of states may 4/6/2007 7 also lead to interesting applications. We hope more refined experiment and theory will soon succeed in these explorations. 4/6/2007 8 References 1. Sugiyama Y. and Hirai, S. Crawling and jumping by a deformable robot. Int. J. Robotics Res. 25, 603-620 (2006). 2. Zhang, Q.M., et al., An all-organic composite actuator material with a high dielectric constant. Nature 419, 284-287 (2002). 3. Sidorenko, A. et al. Reversible switching of hydrogel-actuated nanostructures into complex micropatterns. Science 315, 487-490 (2007). 4. Warner, M. and Terentjev, E.M. Liquid Crystal Elastomers (Clarendon Press, Oxford, 2003). 5. Pelrine, R., et al. High-Speed Electrically Actuated Elastomers with Strain Greater Than 100%. Science 287, 836-839 (2000). 6. Kofod, G., et al. Energy minimization for self-organized structure formation and actuation. Applied Physics Letters 90, 081916 (2007). 7. Plante, J. S. and Dubowsky, S. Large-scale failure modes of dielectric elastomer actuators. International Journal of Solids and Structures 43, 7727-7751 (2006). 8. Maxwell, J.C. A Treatise on Electricity and Magnetism, 3rd ed. (Clarendon Press, UK, 1891). (Articles 103-111 and 641-645). 9. Toupin, R.A., The Elastic Dielectric. J. Rational Mech. Anal. 5, 849-915 (1956). 10. Eringen, A.C., On the foundations of electroelastostatics. Int. J. Engng. Sci. 1, 127152 (1963). 11. Tiersten, H.F. Nonlinear electroelastic equations cubic in the small field variables. J. Acoust.Soc. Am. 57, 660-666 (1975). 12. Pelrine, R., Kornbluh, R. and Joseph, J., Electrostriction of polymer dielectrics with compliant electrodes as a means of actuation, Sensors and Actuators A: Physical 64, 77-85 (1998). 13. Pelrine, R., et al. High-field deformation of elastomeric dielectrics for actuators. Materials Science and Engineering C 11, 89-100 (2000). 14. Kofod, G. and Sommer-Larsen P. Silicon dielectric elastomer actuators: finite elasticity model of actuation. Sensors and Actuators A 122, 273-283 (2005). 15. Wissler, M. and Mazza, E. Modeling of a pre-strained circular actuator made of dielectric elastomers. Sensors and actuators A 120, 184-192 (2005). 16. Feynman, R.P., Leighton, R.B., and Sands, M. The Feynman Lectures on Physics. (Addison-Wesley Publishing Company, Reading, Massachusetts, 1964). (Vol. II, p. 10-8). 17. McMeeking, R.M. and Landis, C.M. Electrostatic Forces and Stored Energy for Deformable Dielectric Materials. Journal of Applied Mechanics 72, 581-590 (2005). 18. Dorfmann, A. and Ogden, R.W. Nonlinear electroelasticity. Acta Mechanica 174, 167-183 (2005). 19. Suo, Z., Zhao, X., and Greene, W.H. A nonlinear field theory of deformable dielectrics. 2007. (http://imechanica.org/node/635) 20. Dissado, L.A. and Fothergill, J.C. in Electrical Degradation and Breakdown in Polymers (Peter Peregrinus Ltd., London, 1992). 21. Stark, K.H. and Garton, C.G. Electric Strength of Irradiated Polythene. Nature, 176, 1225-1226 (1955). 4/6/2007 9 22. Draper, L. and Dobson, P.J. Temperature Dependence of the Intrinsic Electric Strength of Polythene. Nature 206, 1248-1249 (1965). 23. Blok, J. and LeGrand, D.G. Dielectric Breakdown of Polymer Films. Journal of Applied Physics 40, 288-293 (1969). 24. Zebouchi, N. et al. Electrical breakdown theories applied to polyethylene terephthalate filsm under combined effects of pressure and temperature. J. Appl. Phys. 79, 2497-2501 (1995). 25. Chater, E. and Hutchinson, J.W. On the Propagation of Bulges and Buckles. Journal of Applied Mechanics 51, 269-277 (1984). 26. Corona, E. and Kyriakides, S. On the collapse of inelastic tubes under combined bending and pressure. International Journal of Solids and Structures 24, 505-535 (1988). 27. Treloar, L.R.G. The Physics of Rubber Elasticity (Clarendon Press, Oxford, 1975). 28. Boyce, M.C. and Arruda, E.M. Constitutive models of rubber elasticity: A review. Rubber Chemistry and Technology 73, 504-523 (2000). 29. Arruda, E.M. and Boyce, M.C. A three-dimensional constitutive model for the large stretch behavior of rubber elastic materials. J. Mech. Phys. Solids 41, 389-412 (1993). Acknowledgements This research was supported by the Army Research Office through contract W911NF-041-0170, and by the National Science Foundation through the MRSEC at Harvard University. Competing financial interests The authors declare that they have no competing financial interests. 4/6/2007 10 Figure captions Figure 1. A thin layer of a dielectric elastomer sandwiched between two compliant electrodes, and loaded by a battery and a weight. a, In the undeformed reference state, the elastomer has thickness L and area A. b, In the current state, the battery applies voltage Φ , and the weight applies force P . The loads are so arranged that the elastomer deforms homogeneously to thickness l and area a, while an amount of electric charge Q flows via the battery from one electrode to the other. The electrodes are so compliant that they do not constrain the deformation of the elastomer. In practice, the weight may be used to compress the elastomer, or to stretch the elastomer in the plane. Figure 2. Schematic behavior of a dielectric elastomer under a constant force and ~ variable voltage. All horizontal axes are the nominal electric displacement D = Q / A . a, As the charge increases, the thickness of the electrode reduces. b, The free-energy ( ) ~ function Wˆ D is non-convex. The two states on the common tangent may coexist at the ~ electric field E * given by the slope of the common tangent. c, The free-energy function ( ) ~ ~~ of the composite system of the elastomer and the battery, G / LA = Wˆ D − ED , where ~ E = Φ / L is the nominal electric field, i.e., the voltage in the current state divided by the ~ thickness of the elastomer in the reference state. For a small or a large E , the freeenergy function has a single minimum, corresponding to a stable equilibrium state. For ~ an intermediate E , the free energy function has two minima, the lower one corresponding to a stable equilibrium state, and the higher one a metastable equilibrium ~ state. At E * the two minima have the equal height, corresponding to the two coexisting 4/6/2007 11 ( ) ~ ~ states. d, The function E D is not monotonic. A voltage-controlled load will result in a ~ hysteretic loop. A charge-controlled load will result in coexisting states, fixing E * at a level such as the two shaded regions have the same area. Figure 3. Electromechanical behavior of elastomers for several values of N, the number of rigid molecular units along a polymer chain between crosslinks. Various quantities are normalized by the small-strain shear modulus μ and the permittivity ε . a, ( ) ( ) ~ ~ ~ The function λ D . b, The function E D reaches a peak when N = ∞ , is monotonic when N < 2.6 , and reaches a peak and a valley when 2.6 < N < ∞ . c, The true electric field is a monotonic function of the charge. Figure 4. The coexistent states can be tuned by the degree of crosslink and the state of stress. A state of biaxial stress s p is imposed in the plane of the elastomer layer. For given N and sP / μ , the coexistent states have different true electric fields; they are intersections between a curve in the figure and a vertical line (not shown). Imposing an in-plane tension markedly reduces the true electric field in the thin state. 4/6/2007 12 b a Dielectric Elastomer A +Q a L l Compliant Electrode Reference State −Q P Current State Φ λ a D b Ŵ slope = E * D c E << E * E < E * E = E * G E > E * E >> E * D E d E peak E * E valley D ′ D ′′ D 1 0.8 a N=2 0.6 λ N=3 0.4 N=6 0.2 0 −1 10 0 10 1 10 √ D̃/ μ N=∞ 2 3 10 10 1 /μ 0.8 Ẽ b 0.6 N=2 N=3 N=6 N=∞ 0.4 −1 10 0 10 1 10 √ D̃/ μ 2 3 10 10 10 E /μ 8 c N=6 N=2 N=3 6 N=∞ 4 2 0 −1 10 0 10 1 10 √ D̃/ μ 2 10 3 10 E /μ 15 sp/μ=0 10 sp/μ=1 sp/μ=2 5 0 0 5 10 15 20 25 30 35 40 N