18: Shortest Paths IV - Speeding Lecture Dijkstra up

Lecture 18 Shortest Paths IV: Speeding Up Dijkstra 6.006
Fall 2011
Lecture 18: Shortest Paths IV - Speeding up Dijkstra
Lecture Overview
• Single-source single-target Dijkstra
• Bidirectional search
• Goal directed search - potentials and landmarks
Readings
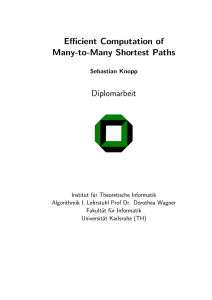
Wagner, Dorothea, and Thomas Willhalm.
”Speed-up Techniques for Shortest-Path
Computations.” Proceedings of the 24th International Symposium on Theoretical
Aspects of Computer Science (STACS 2007): 23-36.
Read up to Section 3.2.
DIJKSTRA single-source, single-target
Initialize()
Q ← V [ G ] while Q = φ do u ← EXTRACT MIN(Q) (stop if u = t !) for each vertex v t Adj [ u ] do RELAX ( u, v, w )
Observation: If only shortest path from s to t is required, stop when t is removed from Q , i.e., when u = t
1
Lecture 18 Shortest Paths IV: Speeding Up Dijkstra 6.006
Fall 2011
S t backward search forward search
Figure 1: Bi-directional Search Idea.
Bi-Directional Search
Note: Speedup techniques covered here do not change worst-case behavior, but reduce the number of visited vertices in practice.
Bi-D Search
Alternate forward search from s backward search from t d f d b
( u )
(follow edges backward) distances for forward search
( u ) distances for backward search
Algorithm terminates when some vertex w has been processed, i.e., deleted from the queue of both searches, Q f and Q b
Subtlety: After search terminates, find node x with minimum value of d f
( x ) + d b
( x ).
x may not be the vertex w that caused termination as in example to the left!
Find shortest path from s to x using Π using Π b f and shortest path backwards from t to x
.
Note: x will have been deleted from either Q f or Q b or both.
2
Lecture 18 Shortest Paths IV: Speeding Up Dijkstra 6.006
Fall 2011 u
3 u’
3
3 s t
5
5 w
Figure 2: Bi-D Search Example.
Minimum value for d f
( x ) + d one search (see
b
( x ) over all vertices that have been processed in at least d f
( u ) + d b
( u ) = 3 + 6 = 9 d f
( u
'
) + d b
( u
'
) = 6 + 3 = 9 d f
( w ) + d b
( w ) = 5 + 5 = 10
3
Lecture 18 Shortest Paths IV: Speeding Up Dijkstra 6.006
Fall 2011
Goal-Directed Search or A
∗
Modify edge weights with potential function over vertices.
w ( u, v ) = w ( u, v ) − λ ( u ) + λ ( v )
Search toward target as shown in
Correctness w ( p ) = w ( p ) − λ t
( s ) + λ t
( t )
So shortest paths are maintained in modified graph with w weights (see
To apply Dijkstra, we need w ( u, v ) ≥ 0 for all ( u, v ).
Choose potential function appropriately, to be feasible.
Landmarks
Small set of landmarks LCV .
For all u ∈ V, l ∈ L , pre-compute δ ( u, l ).
Potential λ
CLAIM: λ
( l ) t
( l ) t
( u ) = δ ( u, l ) − δ ( t, l ) for each l .
is feasible.
Feasibility w ( u, v ) = w ( u, v ) − λ
( l ) t
( u ) + λ
( l ) t
( v )
= w ( u, v ) − δ ( u, l ) + δ ( t, l ) + δ ( v, l ) − δ ( t, l )
= w ( u, v ) − δ ( u, l ) + δ ( v, l ) ≥ 0 by the Δ -inequality
λ t
( u ) = max l E L
λ
( l ) t
( u ) is also feasible
4
Lecture 18 Shortest Paths IV: Speeding Up Dijkstra 6.006
Fall 2011
Forward u
3 u’ s d f
(s) = 0
3
5 d f
(u) = 3
5 w d f
(w) = 5
3 t
Forward u
3
3 d f
(u’) = 6 u’
3 d f
(u) = 3 s d f
(s) = 0
5
5 t w d f
(w) = 5
Backward u s
3
5
3 u’ d b
(u’) = 3
3
5 w d b
(w) = 5 t d b
(t) = 0
Backward s
3
5 u
3 d u’
(u’) = 3
3 d b
(u) = 6
5 t d b
(t) = 0 w d b
(w) = 5
Forward s d f
(s) = 0
3 u
5 w
3 d f
(u) = 3
5 u’ d f
(w) = 5 d f
(u’) = 6
Backward u
3 u’
3 s
3 d d f b
(u) = 3
(u) = 6 t d f
(t) = 10 d f
(s) = 0 d b
(s) = 10
5
5 w deleted from both queues
so terminate!
d b
(w) = 5 d f
(w) = 5
3 d b d f
(u’) = 3
(u’) = 6 t d b d f
(t) = 0
(t) = 10
Figure 3: Forward and Backward Search and Termination.
5
Lecture 18 Shortest Paths IV: Speeding Up Dijkstra 6.006
Fall 2011 v’ increase go uphill
5 v
5 decrease go downhill
Figure 4: Targeted Search s p t p’
Figure 5: Modifying Edge Weights.
6
MIT OpenCourseWare http://ocw.mit.edu
6.00
6 Introduction to Algorithms
Fall 201 1
For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms .