Basic Energy Principles in Stiffness Analysis
advertisement

Basic Energy Principles
in Stiffness Analysis
E = Elastic (or Young’s) modulus
G = Shear modulus
= Poisson ratio
Stress-Strain Relations
Normally, the shear modulus is
expressed in terms of the elastic
modulus and Poisson ratio as
The application of any theory
requires knowledge of the physical
properties of the material(s)
comprising the structure. We are
limiting our attention to linear
elastic structural response.
Further assuming that the material
is homogenous and isotropic, we
only need to know two of the
following three material constants:
1
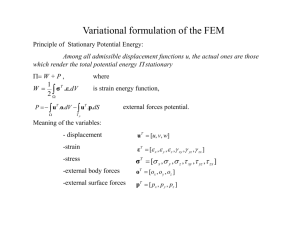
Fig. 1: Typical Stress () – Strain (e)
Curves for (a) Steel and (b) Concrete
with a pronounced permanent
elongation at a stress ym (Fig.1a).
High strength steels yield gradually, which requires an arbitrary
definition of its yield strength yh,
such as the commonly used 0.2%3
G
E
2 (1 )
The most widely used civil
engineering structural materials,
steel and concrete, have uniaxial
stress-strain diagrams of the types
shown in Fig. 1. Mild steels yield
2
offset criterion. Yield strengths for
steel vary from less than 250 MPa
to more than 700 MPa. For
practical purposes, steel behaves
as an ideal material in both tension
and compression below the yield
or buckling stress. The elastic
modulus and Poisson ratio for
steel are always close to 200,000
MPa and 0.3, respectively.
Concrete is less predictable, but
under short-duration compressive
stress not greater than u/3 – u/2,
its behavior is reasonably linear 4
1
(Fig. 1b in which typical values for
u are: 30 MPa ≤ u ≤ 50 MPa). An
elastic modulus of E = 22,000 MPa
and Poisson ratio of = 0.15 are
typical for concrete. In using
concrete for analysis, the ACI code
specifies using the gross cross
area properties to perform
analyses to determine the force
distributions in frame structures,
i.e., ignore the reinforcing steel
and tension cracking in calculating
the force distributions.
Work and Energy
The principle of conservation of
energy is fundamentally important
in structural analysis. This
principle, expressed as energy or
work balance, is applicable to both
rigid and deformable structures.
Rigid structures only require
multiplying the external forces by
the respective displacements.
Deformable structures also require
the summation of the internal
stresses acting through the
5
respective deformations. Internal
work is called strain energy and
must be accounted for in the
energy balance.
The work dW of a force F acting
through a change in displacement
d in the direction of F is
dW Fd
(1)
Over 1, the total work is
W
1
0
Fd
6
Limiting attention to gradually
applied forces, i.e., ignoring inertial
forces caused by dynamic loads,
and linear elastic response leads
to
W
1
0
Fd k
1
0
d
1
1
k 1 2 F1 1
2
2
(3)
F
(2)
F1
k
1
7
1
8
2
Expanding to a vector of forces
and displacements leads to
1
W F {}
2
(4)
The special case shown
in the right figure:
u 1
W 12 Fx 0 Fx u
v 2
where U = strain energy for the
element. Equation (5) is a
homogeneous, quadratic polynomial in terms of the local coordinate element displacements {u}
or global coordinate element
displacement {v}.
Expanding (4) for a single element
({F} = [k] {u} or {F} = [K] {v}):
W 12 u [k]{u}
12 v [K]{v} U
(5)
9
Principle of Virtual Displacements
In prior chapters we established
the relationships of framework
analysis directly utilizing the basic
conditions of equilibrium and
displacement continuity. Henceforth, we will use energy principles,
specifically the principle of virtual
displacements since it permits
mathematical manipulations that
are not possible with direct
procedures. We restrict our
attention to virtual displacements
since this principle is applicable 11
10
to constructing stiffness equations.
The principle of virtual
displacements can be stated as
If a deformable structure is in
equilibrium and remains in
equilibrium while it is subject to a
virtual distortion, the external
virtual work done by the external
forces acting on the structure is
equal to the internal virtual work
done by the stress resultants.
Recall: virtual imaginary, not
real, or in essence but not in fact12
3
The principle of virtual displacements
is expressed mathematically as
(6)
Wext = Wint
F
F1
Wext
W
1
Equation (6) is based on the
conservation of energy principle,
i.e. the work done by the external
forces going through a virtual
displacement equals the work
done by the internal forces due to
the same virtual displacement.
The external virtual work can be
generalized to a system of forces
as
s
where Wext = F1 = external
virtual work (shaded blue area in
the figure) and Wint = internal
13
virtual work.
The internal virtual work (Wint) is a
function of the structure type.
Since this course focuses on frame
members, only axial and bending
deformations will be considered.
Axial Deformation
Consider the axial force system
shown in Fig. 2. The differential
Wext q dx ( i ) Pi
14
internal virtual work (dWint) is
dWint
d(u)
Fx dx
dx
15
(8a)
where u = virtual axial displacement and Fx = real axial force.
Recalling from your mechanics of
materials class that axial strain ex =
du/dx and the axial force Fx = x A
(axial stress times area), (8a) can
be rewritten as
dWint e x x A dx
Fig. 2: Axial Deformation
(7)
i 1
(8b)
Integrating (8b) over the length of
the element and substituting 16
4
work is
Hooke’s law (x = Eex) leads to
L
0
L
0
L 2
0
(9)
d (v)
0
For the beam bending (flexure)
case (Fig. 3), the internal virtual
Fig. 3: Bending Deformation
L
Wint z M z dx z EI z dx
Wint e x EA e x dx
d(u)
du
EA dx
dx
dx
0
L
dx 2
EI
d2v
dx 2
(10)
dx
where v = virtual transverse
displacement; z = d(v)/dx =
virtual rotation; Mz = real moment
about the z-axis; z = d2v/dx2 =
curvature strain about the z-axis;
and Mz = EI kz.
18
17
NOTE: A difficulty in applying the
principle of virtual displacements is
that functions must be assumed or
developed for the real and virtual
displacement functions in (9) and
(10). Development of these
expressions will follow finite
element mechanics, which is
covered in a later section.
Analytical Solutions Using
Principle of Virtual Displacements
Consider the simple axial force
structure shown in Fig. 4. The real
L
1
2
x, u
Fx2, u2
Fig. 4: Axial Deformation Structure
displacement u:
u = x/L u2
The real strain is
ex = du/dx = u2/L
Imposing a virtual displacement
19
20
5
u2 results in an external virtual work
of
Wext = u2 Fx2
In order to calculate the internal
virtual work
L
d( u)
du
Wint
EA dx
dx
dx
0
expressions for u and u over the
length of the axial deformation
structure must be assumed. We
will consistently assume the real
displacement u:
u = (x/L) u2
We will consider various
expressions for the virtual
displacement to demonstrate the
principle of virtual displacements.
First, consider
u = (x/L) u2
The internal virtual work:
L
Wint
u
u
EA
2 dx EA 2 u 2
u2
L 0
L
L
Equating the external and internal
virtual works gives
u2 Fx2 = u2 (EA/L) u2
or
21
The internal virtual work:
u2 = Fx2 L/EA
which is exact.
Consider next:
u = (x/L)2 u2
The internal virtual work:
Wint
2u 2
2
L
L
u
x dx EA L2
u 2
0
22
L
Wint
u 2
x
u
cos
dx EA 2
2L 0
2L
L
EA
u2
L
Which again gives the exact
solution:
u2 = Fx2 L/EA
u 2
EA
u2
L
Which again gives the exact
solution:
u2 = Fx2 L/EA
These three virtual displacement
expressions all resulted in an exact
solution since the real displacement solution was exact. If the
chosen real displacements
Lastly, consider:
u = u2 sin(x/2L)
23
24
6
correspond to stresses that
identically satisfy the conditions
of equilibrium, any form of
admissible virtual displacement
will suffice to produce the exact
solution.
Notice the adjective “admissible” in
front of virtual displacement.
Admissible means that the
chosen function is physically
continuous and satisfies all
essential boundary conditions, i.e.,
is appropriately zero at all
25
supports.
3EA1
u2
4L
Equating the external and internal
virtual works leads to
4F L
u 2 x2
3EA1
Wint u 2
Considering the second virtual
displacement expression:
u = (x/L)2 u2
leads to
L
2u 2
x2
u2
x
dx
EA
1
2L
L
L2 0
EA1
2u 2
u2
3L
A = A1(1-x/2L)
1
Fx2
2
x, u
L
Fig. 5: Nonprismatic Axial Deformation
Structure
Consider next the nonprismatic
axial deformation structure of Fig.
5. We will repeat the process
considered for Fig. 4 with
reference to the geometry of Fig.
5. Considering the first case:
u = (x/L) u2
L
Wint
u
x )dx E u 2
2 A1 (1 2L
L 0
L
26
Equating the external and internal
virtual works leads to
3F L
u 2 x2
2EA1
Considering the third virtual
displacement expression:
u = u2 sin(x/2L)
leads to
L
Wint
Wint
27
u 2
x
x
u
dx EA1 2
1
cos
2L 0 2L
2L
L
1 1 EA
u 2 1 u 2
2 L
EA
u 2 (0.818) 1 u 2
L
28
7
Again, equating the external and
internal virtual works leads to
u2
1.222Fx2 L
EA1
NOTE: None of the three solutions
match. This is because neither the
real or virtual displacements are
exact. However, we produced
three good approximate solutions.
The exact solution for Fig. 5 is
u2
1.387Fx2 L
EA1
The principle of virtual
displacements has its greatest
application in producing
approximate solutions.
The standard procedure is to
adopt a virtual displacement of
the same form as the real
displacement. Adopting different
forms for the real and virtual
displacements can lead to
unsymmetric stiffness matrices.
29
Special Transformations
in Analysis
Congruent Transformation
A matrix triple product in which the
pre-multiplying matrix is the
transpose of the post-multiplying
matrix, e.g.
[C] [A]T [B] [A] or [D] [A] [B] [A]T
Significance of the transformation is
that [C] and [D] will each be symmetric if [B] is symmetric, which is
one of the reasons all our stiffness
matrices were symmetric.
31
30
Contragradience Principal
If one transformation is known, e.g.,
the local to global displacements,
the force transformation will be
transpose of the displacement
transformation provided both sets
of forces and displacements are
conjugate and vice versa. Such a
transformation is known as
contragradient (or contragredient)
under the stipulated conditions of
conjugacy. Conjugate simply
means that the force-displacement
pair only produce work in the
32
direction of the displacement.
8
For linear analysis, this is always
the case when using orthogonal
coordinate systems. A good
example are the coordinate
transformations for a truss member
(17.21) in which the transformation
matrices are rectangular:
{ua} = [Ta] {va}
{Fa } [Ta ]T {Qa }
0
0
cos sin
[Ta ]
0
cos sin
0
33
9