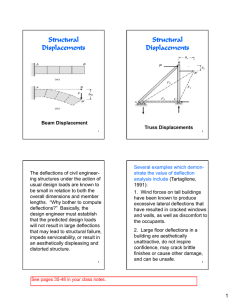
Structural Displacements Beam Displacement 1
advertisement

Structural Displacements Beam Displacement 1 Structural Displacements P T Truss Displacements Di l 2 The deflections of civil engineerengineer ing structures under the action of usual design loads are known to be small in relation to both the overall dimensions and member lengths “Why lengths. “Wh bother to compute comp te deflections?” Basically, the design engineer must establish that the predicted design loads will not result in large deflections that may lead to structural failure, impede serviceability, or result in an aesthetically displeasing and distorted structure. 3 Several examples which demonstrate the value of deflection analysis include (Tartaglione, 1991): 1. Wind forces on tall buildings have been known to produce excessive lateral deflections that have resulted in cracked windows and walls, walls as well as discomfort to the occupants. 2. L 2 Large flfloor d deflections fl ti iin a building are aesthetically unattractive do not inspire unattractive, confidence, may crack brittle finishes or cause other damage, and can be unsafe. 4 3. Floor systems are often designed to support motordriven machines or sensitive equipment that will run satisfactorily only if the support system undergoes limited deflections. 4 L 4. Large d deflections fl ti on a railway il or highway structural support system may impair ride quality quality, cause passenger discomfort, and be unsafe. 5.Deflection control and camber pre-stressed conbehavior of p crete beams during various stages of construction and loadi are vital ing it l ffor a successful f l 5 design. 6.Deflection computations serve to establish the vibration and dynamic characteristics of structures that must withstand moving loads, vibration, and shock environment -- inclusive of seismic design loads loads. Elastic Deformations ≡ structure d fl ti deflections di disappear and d th the structure regains its original shape when the actions causing the deformations are removed. Permanent deformations of structures are referred to as inelastic or plastic deformations. 6 This course will focus on linear elastic deformations. deformations Such deformations vary linearly with applied app ed loads oads a and d tthe ep principle cpeo of superposition is valid for such structures. Furthermore, since the deflections are expected to be small, deflections are measured with respect to the original original, unde undeformed or reference geometry. 7 Work-Energy Methods Work-energy methods for truss, beam and frame structures are considered. Such methods are based on the principle of conservation of energy, energy which states that the work done by a system of forces applied to a structure (W) equals the strain energy stored (U) in the structure. This statement is based on slowly applied pp loads that do not p produce kinetic energy, which can be written as W=U 8 A di disadvantage d off work-energy k methods is that only one displacement component or rotation can be computed with each application. pp Work ≡ force (moment) times displacement (rotation) in the force (moment) direction Differential work of Fig. 1 can be expressed d as dW = P (dΔ) 9 Figure 1. 1 Force versus Displacement Curves 10 For P = F (force), Δ equals displacement δ: δ W= ∫ F dδ (1) 0 For P = M (moment), Δ equals rotation θ: θ W= ∫ M dθ (2) 0 Eqs. (1, 2) indicate that work is simply the area under the force – di l displacement t ((or momentt – rotat 11 tion) diagrams shown in Fig. 1. Linear Elastic Structure 1 W= Fδ 2 1 W= Mθ 2 Complementary p y Work The area above the loaddisplacement diagrams of Fig Fig.1 1 is known as complementary work, W as shown in Fig 2. For a linear-elastic system: 1 W =W = PΔ 2 12 Load Fig. 2. Complementary Work complementary work W Displacement Direct use of work-energy work energy calculations is only capable of calculating displacements at the location of an applied point force and rotations at the point of application of a point couple; obviously a very restrictive condition. Consequently, virtual work principles are developed in 13 the subsequent sections. Virtual Work Virtual (virtual ≡ imaginary, not real,, or in essence but not in fact) work procedures can produce a single displacement component at any desired location on the structure. To calculate the desired displacement a dummy or virtual displacement, load (normally of unit magnitude) is applied pp at the location and in the direction of the desired displacement component. Forces associated i d with i h this hi virtual i l fforce are subscripted with a V. 14 Use of a virtual force in calculating virtual work is defined as the principle of virtual forces (which will be tthe e focus ocus o of tthis s cchapter): apte ) Principle of Virtual Forces If a deformable structure is in equilibrium under a virtual system of forces, forces then the external work done by the virtual forces going g the real displacements p through equals the internal virtual work done by the virtual stress resultants going through the real displacement differentials. 15 Alternatively, if virtual displacements are applied then the virtual work is defined as the principle of virtual tua displacements: d sp ace e ts Principle of Virtual Displacements If a deformable structure is in equilibrium and remains in equilibrium while it is subject to a virtual distortion,, the external virtual work done by the external forces acting on the structure is equal to the internal virtual work done by the stress resultants. 16 The virtual work principles (forces and displacements) are based on conserving the change in energy due to tthe e app applied ed virtual tua load oad o or displacement, which can be expressed mathematically as WV = UV ffor the h principle i i l off virtual i l fforces, which is the focus of this chapter, where again the overbar signifies complementary energy. The real and virtual complementary p y external work is shown schematically in Fig. 3. 17 Pv = virtual force or moment Δ = real displacement δ or rotation θ P + Pv P WV W Δ Fig. 3. Complementary Real and d Vi Virtual t lW Works k 18 Complementary Axial Strain Energy For a single g axial force member subjected to a real force F, the complementary p y strain energy (internal work) is F U= δ 2 FL δ= EA 2 F L ⇒ U= 2EA 19 For a single axial force member in equilibrium subjected to a virtual force FV, the virtual complementary strain energy (virtual complementary internal work) is U V = FV δ FL ⇒ U V = FV EA Real and virtual complemencomplemen tary strain energies for a single member are shown schematically in Fig. 4. 20 Fig. 4. Complementary Real and Virtual Strain Energies g for a Single Truss Member F + Fv F UV U For a truss structure: m m i=1 i=1 δ UV = ∑UVi = ∑Fvi δi 21 UVi = Complementary Virtual Strain Energy for Truss Member i δi = Real Member i Deformation Fi Li δi = ; for a mechanically Ei Ai loaded truss member δi = αi Li ΔTi ; for a thermally loaded truss member α = linear li coefficient i i of thermal exp ansion ΔT = change in temperature 22 δi = ΔLf i ; for a fabrication error of ΔLf in the truss member Non-mechanical δi are positive if they produce a positive change in member length consistent with tension positive forces in truss members. 23 Example Deflection Calculation – Mechanically Loaded Truss Structure EA = constant R k Rocker Calculate the horizontal displacement at C C. 24 Example Deflection Calculation – Thermally Loaded Truss Structure EA = constant EA = constant α = constant Calculate the horizontal displacement at G if the top chord members are subjected to a temperature increase of Δ T = 100 100. Equation of condition at C! 25 Complementary Bending Strain Energy M dU = dθ 2 M dθ = dx EI 1 M ⇒ U = ∫M dx 2 EI L 26 dU V = M V dθ M ⇒ UV = ∫ MV dx EI L M + Mv M dU V dU dθ Fig. 6. Complementary Real and Virtual Strain Energies for a Differential Bending Segment 27 M = reall bbending di equation ti d due to the external applied loading M V = M δV for a virtual moment equation due to a unit force for a point displacement δ calculation at the desired point in the assumed direction of the displacement = Mθ V for a virtual moment equation for a unit virtual couple for a point rotation θ calculation at the desired point in the assumed rotation 28 direction F a multi-segment For li b beam: UV = ∑ ∫ i Li Mi M Vi dx E Ii where here i designates beam segment. 29 Beam Deflection Example Calculate the tip displacement and rotation for the cantilever beam. 30 F a frame For f structure: m UV = ∑ Mj ∫ MVj E I j dx j=1 L j where m equals the number of frame members. Note, axial deformation has been i ignored d. Also, Al if a frame f member is composed of multisegments then a summation segments, over the segments must also be included. 31 Frame Deflection Example Calculate C l l the h vertical i l di displacel ment and rotation at C. 32