Document 13686921
advertisement

MASTERS DEGREE
SPECIAL PROJECT
SPRING 1987
FRACTAL SURFACE GRADIENT ESTIMATION
U~ING
SINE
SECTl~N
by
STRUCTURED LIGHT ILLUMINATION
La~ry
8. Hassebrook
Under Supervision of Dr. K. B. Earn
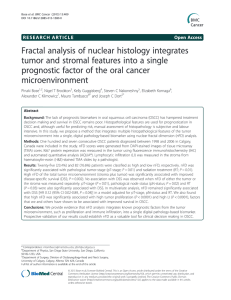
Cove" f(our",,' L~fl flou,.-e hi th ....... fl ..ct .. d l",a\1e c,.- ... t.d by p"-oJectt,,o two
st"uaold .. l 1~ .. O.~ Iro. two ~.p~,.-at8 anol.5 onto .. pl."" "urf~c
RiQht flQur.
"how. A t ypl c "I PSD "!It! ",,,to' 01 thO' f lour e on thO' 1", t •• v l
d fro .. "
different "nole fro~ the two proJections. Nottc. th"t there ar. four peakS
lndlc .. t tn o 2 proJ~ctlon •. The peAk locations are an Indlc"tlon of thO' .. urf.c.
oradient of the plane r.llectlno the p,.-oJectlon s .
TABLE OF CONTENTS
I~bstr-ac
t
1
I ntrOdL.lC t ion
Random Generator
Fractal
Surfac~
GeneratIon
6
Fractal Dimensi n
10
Least Squares; Appr-o:nm2,tion of SLlrface
1. :.
III umi nat i on Ref 1 ect ion l"lodel
15
ction CDefficient Models
18
Refl
PSD Estimate
26
Estimation of
e~v
29
Conclusion
Bibliography
Cr-edits
-34
aBSTRACT
A structured light method for
slanted fractal
surface is
The mE'thad
image onto a
of
a
pre~enlud
coordinate fl'"'ame.
dj.rlclLLion of the ,:
a~{js
the gradient of
incoherent sinusoidal
.ngle referenced to the z
The reflected
of
a
(Sine Section Method [1]).
involves the projection of an
surface at an incident
referencf.~
fr-om the
estIm~ting
a~is
image is viewed
the refer-ence fr-ame.
A power
spectral density estimate is then performed on this r-eflected
image.
After- the DC component is filtered out the 10 ation of the
peak F'SD est i mate value is used <--'\s an i ndl cator of
Ull? surface
gr"adient idz/d;{ + jdz/dy in r-efer-ence to the r-eference fr-cme.
A measure of performance is obtained by comparIng the gradient
estImdticm valuE'S with that of
into the fr-actal
a Least Squares fit of a flc:\t plane
surface.
A computer simulation was created to evaluate this method.
second order- reflection coefficient model
'<Jas also Included to
indicate possible gr-adient angle lImitations.
This method can be Llsed to obtain a 3-dimensiondl
representation of a 3-dlmensional
surface.
:I.
A
INTRODUCTION
This method of gradient angle estimcltion can be broken down
into five pal-ts
(see
figure n 1)
•
>.
ObJ..c.t.
'''-0.
_ _ _ _ __
14)
y.
FIO~"·
••
(II
PERFOflt1ANC£
I't["ASLRI;
paD P.. ,.
.A,.....
E.t i
l
lJt&t
Ot'lo
l.,.
(N+l)2 3-dimensional
U!51
nq a f mom of the
(x~,y.~z~)~
coordin tes
I;)i
enp.r process.
is randomly generated
The end l'"'esul t i s a surf ace
t-esembling a discrete sample of a mountcun terrain whose roughness
is characterized by a fractal
variance of a normal
surface,
dimension 0 which
distrIbution.
1S
related to the
In generating the fractal
a bias is introduced to give least square
slopes~
dz/dx
2.nd dz/dy.
PROJECTED IMAGE:
sinusoidal
It i
5
im~ge
Once the fractal
is projected onto it from an inCIdent angle
a Si su m€'d t hat thE:, E!n t i r- e
the depth of focus of all
the tr-ape2,oidal
surface is generated,
th
SL.l
r- f ac e i n qu est I on i s
vl/?
di!sto"t.ion t.hat
would
b~~
SiN'
vi i t hi n
1I
imaging sy.tems involved.
a
Furthermore
cr-eated by the projection
from the incident angle IS Ignor d since 1n practice i t can be
·ompensat.!?d for
Fi.gure #1
ttlt.:'
in the design of the imaglng system.
proj(,;? ted lmage is sinusoIdal
As SE'en
in
along one dimension and
constant alol-IIJ the other.
REFLECTED IMAGE:
The r-e-flectled Image consists of an amplitude,
fr-equency and phase modLllation of
zero gr-adient angle 9_ v
along the y axis
IS
the projected image.
for the surface.
Given a non­
a sInusoidal component
introduced into the reflected image.
this component is modulated in amplitude,
Again,
frequency and phase.
leads to a complicated r-efection which lencJs itsE?lf to
AM~
This
FM
and/or- PM analysis depending upon the condItIons of the sur-face.
Further complexity is intr-oduced into the system by r-efleclion
coefficienls dependent on local gradient angles
Fo
unetly thLre are
interdepend~ncies
ta~en
parameters whIch can be
f~pquency
e~M
and Br y •
between these modulation
advantage of.
In thls paper,
modulation is used as the key ingredient to estimation of
the gradient angle parameters 8. M and amy.
PARAMETER
ESTIMATIO~:
spectal density (PSD)
In order to estimate 8_" and
8~y
a power
estimate is performed on the reflected image.
This is essentially the magnit (de sqLlared of thE' tvJO di.menslonal
discrete Fourier
i~;
tr~
eflected Image.
sform of the
Since the system
based on incoher-ent illumination there is a large DC component
which
IS
'FIltered out.
Thi'; leavr,:,>s two symmetrical.
locati.on of one of these peaks is found.
frequency
pl~ne
peaks.
The
From this location In the
the pr-edominant frequerlcie!:; f"'
M
21nd
fry
ell'l"'
pres;umed to be the outcome of the frequency modulation of the
proj cted image. So dir ct relationships
estimated gr6dient angles 8.
necessary~
N
and
a. y
a~e
used to determine the
•
a l.east squarE'S plane appro:<imati.on of
the fractal
surface is used to generate reference gradient angles
a_~
and
a.
y
•
These angles are assumed to be the "true" values for which the
estimated values will. be
Not.e:
ompared wjth.
It should be emphaSized that all
measurements and
geometric parameter-s are intended to be refer nced to the reference
frame defined by
y~
and
Z1
primary coordinate system shown in
figure #1 unless other-"Iise stated.
4
RANDOM GENERATOR
We u'..>C' a
r-andom
Since U1L' 'dope
fract~1.1
gener-ator-
to deter-mine the sur-face grdLJi c:'nts.
a conditional
1S
sLwface proper'ty of
r-andom var-lable we satisfy the
11dving its gr-adient being undefined.
In this paper the slopes have approximdtely normal
di stt'"
1
but i ems.
We can
of
1_ISf2
independ~nt
Given a
S,..,
A
:~ero
U1P
mean is assumed unless otherWIse stated.
followinq algor"ithm (2] to gener-ate a
random values.
Their- distributIon is Gaussian wIth
uniformly distributed random variable
==
( --2 I n
(lJ,..,) ) ~"2
sequence
u~
E U{O,l)
FRACTAL SURFACE GENERATION
Glven the random sequence d scribed in the previous section,
an algorithm is needed to use them to generate a fractal
The fractal
surfaces In this papf't' are formed from square
grids but
to understand this qeneration.
a fractal
surface on a triangular grid.
:~tep
will
bjas the least squ re gradient of the f1
+ by + ,._
a:<
Step 2:
ver-te:-:es;
2Il"1(j
hori~ontal
and
consider the generation of
Choos8 3 points contalned In a plane.
1:
s~
15
surface.
=:
This plane
surf~ce.
al
C
(:d~yi,zi)
Sequentially find midpoints
add to their z component d,
tunes
Sj.
bet~"'een
where d ..
15
the
di!'.>tance to the Cb'rlter- pOlnt from the adjacent vertex
a
random var-iable representing the slope.
appro:dmates lr(:lndomly cllC:tnging c.onditional
This process
slopes bClsed on a
Gaussian distribution.
3
flQu" • • 3
\S
~
2
2
Step 3:
t.1,e previ
DUS
Repeat step 2 but with all
subdi vi si on
etC.
(note:
d~
6
wi 11
the trIangles created from
appro>~ i
matel y hal ve each
Also nate that sldes are shared between tr'iangles and only
ti.me. )
need to be subdivided once.
To apply this process to a rectangular grid we simply treat
the orjginal
grid as two adjacent right triangles.
/.'1.0', Yo,
h.------'1k--~
then
1he orignal
l
etc.
x,)~,
4 points l i e In a plane defined by
+ by +
2,>:
d
J. d'
== c:
'2
is the horizontal distance between the outer pOints and the
cenb?r poi nt.
d
.l.:Z
= (~:
J 0
Th8 gr-adlent
We can
z
..:.
From
-~
0+
+
(y
l
0
-
Yl
) :;::
the plane can be described
(::2)
by
two angles,
describe this plane with pararnett-ie equations.
tan
(8 .. ~, )
>:
+
B_""
( 2:. )
. tan
(S .. y )
y +
B. y
(4 )
( 1) ,
(3) ~
tan e.""
tan 8. y
The
~<.I.):Z
-
r-1~""1.I1
ts of
and
=
=
(4 )
we know
dz/dx
= -a
(5)
d<:/dy
=
(6)
-b
this procedure can be seen in figure #5.
7
( b)
(c)
Flgur • • ~ show- fractal surfac •• gan.rated by using the algorlth.
dlscus.-d In thl. section. Each surfac. wa. g_n.rated with a
dlff_r_nt ~, which r.~lted In dlffer.nt fractal dl.-nslon. O.
•.
b.
e.
d.
0
0"
0"
D"
2.ooI8,~'" 0.001.
2.0186,
2.0314.
2.0993.
9
.. O.O~. 9
~, .. 0.02 • 9
" .. 0.0:5 • e
~,
-0.:5
0.9
-2.6
-4.2
d ••;l'"_••
d~
dW9r
degr
e
-0.6 d~r_.
9
-0.4 d~r•••
9 .. '" 0.8 d .. or ••
e.... 1.4 d-Qr ••
(01 )
~ '(n'·I] r-------------~
0'512
£)-P.l>/
[. rt'((y
£ ! -,('Jf
,-"
0
0
:13'_1
:;3'·)
(a)
3>' - I
(c)
( b)
Figura .6 .how. the e~arl.on of the conventional Wiener prOCe••
and the f .. actal gen~.tlon proc". used tn thl. p.p....
(a) shows
the lin.... relationship b.tw-9n E (M'lt» and t, I •.• aquatlon (9).
(b) show. the ... I.ttv. varlanc •• of each point ~ a fractal Orid
which I • • • quenced fi ... t by M •• then by 'I..
(c) .h~ fbI aorted
tn order of Ine..... tng varlanc..
It can ba ._n that although
th .... Is a dlfferenc. b.twe.n (al and le). the concept Is .Ieilar
and .. pleca-wi •• approxlaatlon may b• •pproprl.t••
8
Wien r' Process:
It is important to note that the surface qenerator is a form
of the Wi
process.
enE~r
ThIS
process
ch~racterized
z
commonly defIned [3] for
IS
t
!
0
is
and
by the following properties:
(0)
::
(7)
0 .•
E{z(t)} :: O.
(8)
( 9)
( 10)
1
(2rr
()'~t)
1./2
It is fUrther noted that.
(Zl.... ,.
Z~)
-
and
(Zl.
-
Z1.-1.)
are statIstically independent.
What is not generally noted is that each value of
is by
21
some means dependent on its predecessors.
In the case of a fractal
averagE~
surface each
2.1
is
d~pendent
value!:; of the previous adjacent valu[·",'. of
Usi nfJ
t.hi s
we can r'estate
1
e >~ p
(1.0)
(- ( Z t:
-
21
on tte
(z ........ ) .
as
Z ....
'V _ ) : ; ,
/
(
2 (),.2)
)
( 1 1)
(9)
will
(211(T'::<:) 1./2
It is importi'lnt to note that EC-: 2
somewhat different for
a fractal
surface
(t)}
or
(see figure #6)
be
since the
Order of the sequence is not mapped in adjacent positions but
instead to center points.
This mapping includes multiple and
parallel conditions associated between the outcomes of the
sequence.
9
FINDING THE FRACTAL DIMENSION
H"le
a
fr-actal
su,face.
Usually if
used
to i.ndlcate the
"r-oughness"
of
sur"face is smooth then the
an N-dimenslonal
dimension is defined to be equal
The fractal
,-andom 9
1.5
Ther-e ar-e different ways to define thE' fractal
d i mt=:-nsi on.
fractal
dJ menSlon D
to N.
dimension used in this paper depends on u 2
of the
r-ator <OInd the gradient anqlE's 8 .... Clnd 8_ y obtained from
n
the leClst square plane.
For
fj~ed
let
~n
let a
1
0_~
a_v,
and
D is defined as follows:
be N segments
be 1 segment
where segment indicates the unit of
length and therefore an N
frequency q"-'id has N Sei]ments to a side.
let An be the area of the least squar_s pldne
let A1 be the total surface area of the fractal su,face.
Then we note
1 og
(~:1
~
~
strai<:lht line indicatlng
the fractal
scaling
log A .....
l. og ':>:
figur-e #7
1
j (I
pr-operty
The
~:;J.ope
=
slope
the sty-
(log AL
since al
slope
elf
=
Il
ht line
log An>
-
I
In
-Figure *17
(log at -
log
is~
an)
1 then
=
note that if A 1
= An
then slope
IS
0
Note: Since the total area A 1 of the fractal
surfa e is
dIVIded by the total area of An the least squares plane.
of D from
0_~
and
a. v
the bias
is reduced.
A rl'lationship between the variancE' of the random generator
and the fractal
log
(D-:2)
arid .log
Notice
tl,,,t
8~
:7.2
16,
dimension.
(f2
for-
This is a linear relationship between
fl>~ed
8 ..... and 8 .. ,v as seen in figure #8.
Lhe scaling pr:'i'L>y-ty of
cH1c1
6Ll-.
11
fr,', 1,,\1
sLwfaces holds
-for N=4,
'4
+
Ib
6'>
8
4
0
0
()f
<J fJ)((1sur('
x
32.
i/~nlA5
rdriOfl(('
N sr'" bo I
Frac+o
f
20
D/nlltl~/O'l
()
9
D
cnst,." 1(j .:5call~
l}()jJ1rfr for liar iOIJ:S
Grid FrtetA tnC /f.5) N
t
~
Dfft1
Q
t:J
~
iX
~
~
IS
j
I()
m
~
/0 loa[ICJ<J(6- 2)]
®
~
s
~
$
9
,01
$
,Ol
0
·1
,05
,0.'
0
.2
, j
.5
tigrJ(('
2
~
...
l2
5
#
8
LEAST SQUARES APPROXIMATION
st i mated par-arne er-s of
Tile
the system proposed are two
To givE' a measure of performance, a
flat plane is positioned Llsinq 21 least squares
surfa e
fractal
The
for
this reference plane
C\'"
+ by + ,;. =.
a '/
+
Consi der- all
vectors.
b Y -
.',
So ·f rom
~
C
c:::
y dnd
IS:
(2 )
c,
z coord i nates in
ter"ms of
~~
~
and l.
( 2) :
(
(3)
of the
(the "least squares plane").
~quation
or
appro~omation
::. )
can be e:<pr'essed by:
The least sqUcU-t=S solution is
then given by:
(4 )
Where 8_>< and 8. y
are defined as follows
(see figure
.figure #921
let y=.O
Z
dz/dx
+ .. ""
a>:
~
:::
figure i49b
let
C
by + z = c
z =. -by + c
x ==0
-a:< + c
-a = tan
e~H
dz/dy :::
13
#9).
-b
=
tan 8_ .....
<5>
As shown in the surface generatlon sectlon:
8 ... ,...
=
aY'c an (-a)
These values will
8. v
be considered
which the estimated values will
l?sti.f1l.ted
valL.\t:~s
are denoted as
the reference values from
be cDmpared.
8""H
14
= arctan(-b)
and
(I_v.
The associ.ated
(6)
ILLUMINATION AND REFLECTANCE MODEL
The illuminatIon and reflectance mo(jel
used to det rmine reflected Image intensity
SLW f a l: e
8 lNl
c:: oar dill ate
>~
_
~
y_•
z _,
I(x~,y~)
is
based on
the inc i dell tar; 9 1 e of ill u min at i on
the local surface gradients
object intensity function.
(see figLlre #10)
dZ_/dx_~
and dz./dy.,
and the
The object intenSIty relationship is:
e,
--.-----il~----\..
~~
X~
ray Z
lint 3
ray
1
"t" '" 7
tOf'l
tJix
.f.,,~(r
. / S<.dto. a
(j",
Figure .10. Thera are 3 c~dlnate .y.t.~.
The pri.~y
coordinate .y.t. . 1. ~" y" z,.
The object i~.Q8 4ra. . 1. d.41n8d
by )("
y" z, and the r.-flllCt.c! I_g_ fr .... 1. dufln8d by M,. Y"
z,.
'J'
I t
'I
; 5
.. ;, I
au" cf til,. pap.' •
Th. y"
y. and y, alei • •,.. into the p ..p
.
y., ~d z. are ruf ..,.."c.c! to tha pr I
ry aM i •.
J(.
-'ld y • ...,...
r 8f .rancad to Ie" y, ilnd
J(,
and y, .,.. raf ..... ancad to lol, and
y ••
Ie..
z..
15
By scanning the s
coordinates
lrface
~_
and
y_
we
~now
~_
=
f (:< ... V.. )
Then the imaged XV coordinates are the same as the surface xy
coordinates.
y~
= y ..
IDe a I 9 t- ad i en t s
The
0
f
the s Ll r f a c: eat poi
11 t
,'_,
y ..
~
z... are
obtained by
Y .. )
=
d .. >-<
(:221)
y .. _ 1)
=
d ... y
(2b)
f (>:",,-~,
d ::: .. I d Y ••
::=
f (>: _ , Y .. )
-
f (>: .. ,
There are two reflectance models used in thlS paper,
1"""",1
(dx"",,d .. v
)
dnd
r>-<y2
These are discLlssed in detail
(d", ... ,d",y)
in the section on reflection
coefficients.
Yo can be found given
A_
V- and
then
detenlli ned by
The equation for line 3 In the reference frame i
e •
(4 )
lhe equation for ray 1 is:
(5 )
Boo can be dptermined by substituting :-:. and z_ i.nto (5)
.1:• •
(5)
=
(6 )
can be rewrltten as
(7)
(7)
16
ConsicJerlr\(J the i.nterse tion b",tween ray
eq latlng
(4)
and
(7)
the >;
value of
1 and
line -3 by
inter~;ection can
the
be found
as follows:
(8)
-
(9 )
+
L..
(10)
5i nce ,.
is
TW\-Jn
the perpendl cu} ar
di stance R between ray
1
and ray 2 can be found by noting:
and
(12)
l.S substituted
Usinq
into
>:
:=:
>: <::>
C 05
81
(12 )
..
to give
(11)
iden1tity:
the
( 14 >
then
X o
found by
1S
:::: >: .. cos El iH
I
Recall
1
(>:
t.
Z ... 5
I~nowing xQ~
And from
found.
+
Into (14)
(13)
to give:
<15>
in
d~H~
and
d~y
an nquation for
I~
can be
(3).
Y 1)
=
I t can be seen
I
c> (
>:
C>
~ V0
)
r ........ t (d '"'
H
~ d.,
y
(16)
)
from figure M10 that x_ -
Xi
and y.
= Yi
so:
(17)
17
REFLECTION COEFFICIENTS MODELS
Tlflo ref 1 ectallCF.' cC1f?ff i
reflection attenuation.
Cl
ent model s
were used to deter-nll ne
They are as follows:
Refl ect_~LJn t:1oQ.!='...L_l.:
In model
the
1 the reflected
image is not attenuated.
r-E'flec.tion cDe·Ffir:ient r ......",.
Beflectance Model
In model
2
the effect of
always equal
IS
2:
a sL'cond
or-de~-
appro>:imatlon is used to resemble
includes two factors.
Whl crl is anI y dependent on the d.., Id y
gradient
d~
to 1.
a surface gradient on reflection attenuation.
This model
x
Therefore
...
The first factorC4J
=
lhen r
y
:::
arctan
cos
y
gradi ent and not em ei ther the
or the incident angle of
let By
is r
Illumination.
( 1 a)
(dry)
( 1b)
(t:J..,,)
The second factor is dependent on both the Illumination
incident angle
a~
..
and
d~K'
There are only three conditions that
seem appropriate to assume about the reflectance properties of an
arbitrary fractal
The first conditiun is that there will
surface.
be essentially no reflectance
In line with illumination
(r~
::: 0)
if the surface gradient is
(assuming the illumination IS
approximately a plane wave).
This is illustrated in figure #11.
18
i I I urn! na t ion r ay
observed light ray is zero
~
r~
= 0
figure Itl1
The sLcond condLtion is that maximum reflectance will
when
8~~
parallel
IS
occur
such that an illumination ray will be reflected
to the z axis as shown in figure IH2.
2"
fay
figure #12
The third boundary condition is when the surface gradient is
inflnite
(Je.~
paral.lel
to the z
in whi.ch case no light wlll
C\;·~is)
be reflected to the viewing element
(r
N
=
0).
This boundary conditIon is approxlmated with a large slope
since
infinity
shown in figure
L5
Impractical
to implement.
This condition
IS
~13
'l,
figure U13
let r
N
for tan
'/.1
19
=
0
8~~
=
10 }>1
Thes
thr-ee condition are summarized in the following table.
r ..
d"" ...
(>
tan
(9
...
-
11/2)
1
tan
(8;1. ..
I
2)
I)
10
i
table #1
A piecewise model was postulated to fit these conditions by
first dividing d z
order
equation i s
r ..
~t:
><
into two reglons.
Llsed
+
<3
+
b.d",,,, +
This model
"d ... :r.: +
For each region a second
as follows:
a~d:'2Z""
d ...
b~d~2:
d:r.:><
M
1..0(
..::
tan
(8 i
"
tan
<8,. ... /2)
was assumed valid for tan(8 i
...
-
..
/2)
rr/2)
Regi.on
1
(2a)
Region ....
..::.
(2b)
<
The coefficients were determined to be as follows:
let d
let d 3
:=
1
tan(El;l. ... -
rr/2)
10
20
d", ...
<
10.
And
finally the over"all
det er"mi ned by the pro oouc t
=
r"y2
~r~
r".>-\Y=:
(be::>
where 8 y
reflectance coeffiCient r ... y
o·f r,", and r
is
v
r"r y
(4)
+ C71\d",,.. + a:c:d", ... 2)
cos Ely
d",,..
.''.
tan
(81. ...
/2)
<5a)
+ b1d", ...
cos Ely
d .....
'}
t ':1n
(8 LM
/2)
(Sb)
-I­
b::!d ... ""
= il.rctan<d .. y
(6a)
)
<6b)
r
( 4J.
y
is a common reflectance model
The r ... model
is less common so a rough experiment was
dp!",iglled t.Q show that it.
~14
the theoretical
sic, p Eo d ><
H
•
and its usage is described in
IS
in the "ball park range".
values of r ... are plotted
In figure
(for By = 0)
versus
The circled locations are the result of measurements
obtained using a phototransistor as a sensor and a white piece of
paper as the ·',Lwface.
The surface was imaged onto the sensor by a
lens and the Illumination was presented at incident angle Ell ...
=
n/4.
The paper was then rotated to the appropriate slope values and
a sensor measurement made.
Although the experIment was crude in
nature it does give the reader a rough Idea of
the potential
validity of
of r ....
the second order conditional
model
Further accuracy of such modeling can be obtained by
increasing the number of regions and/or the order of the polynomial
given more Information about a particular surface.
21
HQu". 114
• mod,-
I
o "..~a..s .... ' ~d..
\
r,dlt'r..°'" oil
.,."h,lr ('oper su/f.-p
\
o
0.10
f~~t~t'().I1}'~fC>")
\.
\
G
.4
\
\
\
\
\
\
I
I
-2
.,
o
{),.,
'2
8
!X~
4.5 0 -= Yf
J(" ~ (
(J(r -
/0
~)
dz :: tM1 ( &(7/2)
til < -uu, cf.rx
O )( ': _ _I
2
d~
~ dz.
< -0"
~~ <: /0
~_--
(d/ - ti, 1) - '2 dz ( d, - d .)
h,,, =- - '2 b!, ~ j
ho'K
,.')
~.,
-""'­
-=
1- h,'t'
t
liz - bU
: /2
~
POWER SPECTRAL DENSITY ESTIMATE
OF THE REfLECTED IMAGE
A very
est i mat i. on
~:;hifted
b,;\C;ll:
is used t
J
o·f
allow retr-l eval
D
powl:?r spectral
of
the
density
freqLlency and pt1ase
lluffilnat.J.on patter"n is a
sinusoidal
,'Jave pt-ojected
from an incident angle relative to the viewinq direction.
estimate yielded two spikes 10 ated at particularrepresenting the reflected image
f i Q ur e
fr~quencie5.
f
nH
the PSD
locations
and
f~v
(see
tt 15) •
SInce the illuminatIon is assumed Incoherent ther-e
spike at f •• ,.. .::: f,.. ",
The spikes
~re
=
U so thiS DC term
From these two peaks,
also a
is filtered out.
(after DC filtering).
one is selected based on its being
within a par-licular boundary r-egion(see fi
From the >: and y coordi n.3t8 of
tlli s
ure #15b).
lonE' peak \fJe have the
predominant reflected image pattern frequenCIes
the next two sections we estimate
and f . y
IS
located automatIcally based on their magnitudes
being peak values in the PSD estimate
f.,..
(PSD)
p~ttern.
illuminatIon
Since the
(10)~[llJ
method
th~
f_~
and f_ v
•
In
sur-face gradient angles from
•
As the fractal
dimenSIon increases the magnitude of this peak
decreases and other
pea~:
estimation errors.
In
locations increase leading to larger
this regard,
the lntent of
this paper- to
consider the limitations of this simple estimation algor-ithm.
Given this backgF-ound o·f
t.he rr'oblem the reader ShOl.dd be
aware of the possible improvements on the PSD estImation algorithm
lhe
~10urlthm
used consists of a rectangular window,
no zero
P ",del 1 ng and no aVt?r'Clg i n'J, i e. :
{I
where w(x.y)
I.(x,y)
>~
and y
= rect
= reflected
ar"
w (}: , y)
I . (:: , y)
( x-(N+l)/2N • y-lN+ll/2N)
image
e integer val LIes
and N
wh~re
m = 2.3,4.5 or 6
PSD averaging was trIed but tended to reduce the distinction
of
the desired peaks as might be expected.
peak values
wel~e
If more than just the
to be consiclered t.hen this enhancement mlqht be
benefIcial.
l.oJi ndowi ng was not
var i ed but some i mprovernent
E'/:pected with hi,gh D"s althouqll the usual
ffil
ght be
resolution versus nOIse
trade offs would probably occur.
Zero padding was not tried but would seem to have the most
potential
in reducing the number of viewing sensors yet maintaining
the resolution of the PSD estImate.
Zero padding would also
decrease the quantization error of f .
24
H
and f . v
(see figure #16).
r ..
I
I
- - - _. - .,
0 oJ-I
; _
I
_..
,J..
J
..l
I
"j'"
~_. ,
_
~,,_
"" ..
.n""
''''~
-"-r-~' .;.
,,~...'...
H'I,lIr{
to
-
c
•
•..." ...,.
,I,., _._ ..,_, ._,__....
I
,\,,'
"" """ , .. 1
..." J.., __.
f
I
..--....­ 1'"
....., .--­ _..­ ''''''f'-;'" ._-,
.....
__
_
,
~_~
,....
_"u
•••• ,
_
•.•
,
: ", :".: ~'" ..".... ", .,- """ ".., T ,...., ,--, ,,­ -- --"
-:if,: ~. -~ ::5-'.-;:. ~:5 -,.-. "... ,-o--+~
C ~cr "~' ~(..
be
'"l..+I':-.J..;-/
Cdr
~( /
<
() J _
().
"n
iI.
(rorJ.
10
i
,-rtO
01) ~
f))(
(r~
f
- -" quan t, ~QtIO~
~r(o,
5
-({,,3
6
- 8·{,
'J
-0. (;
iI. S
Is', 3
~
((
II)
JI
IZ
ID
0,
'E)
' ell
0
-20
G.
, -10
-10
(1),
M.t')
4</.4
I:;
18.
,
,-0,
.,
0.
"
Ii
/3
,
0
~
CiS ~ (de3 f~~J)
U.!:'
Z1. ,
3'f . q
'$
~o
50
0
I.)
On
eex
ESTIMATION OF
In tl-.. is Sl:,ction .:In est.imate of
is determined fr-om ttl'" f_ ...
~)_><
and f . v yIelded by the PSD estImatIon algor-ithm.
a flat planar surface described by the parametric
ConsIder
equations:
Z
==
fTl",...
+
:~
(1)
8"",,,
(2 )
Note
th~t
dz/dx -
ffi","
=
tan 0.
(3 )
M
(4 )
Since
f:.,quat.ion'~>
(3)
and
surface and since (1) and
=
(1
8 .. ,..
,,,nd only use equat.ions
(see fIgure
(2)
(1)
are lInearly independent we can let y
and
(3)
for the development towards
1*10).
The slopes of
the
incident rays projected from the object
pat-er-n planE' are -l/t.:ln B.t, ...
this section for
descr-ibe the gradient of the
(4)
as shown in figure #10 reproduced in
convenIence.
"
- , - - -.....- - - ­
x,
~I
.----
::6
-­
(l1li'5'''''
__ / s . . . ,./,,<.(
..
~
Consider ray 1 and
5 Ur f
1 (p ~ ==
c eat poi n t
r~y
2 where ray 1 intersects the target
(>: .. 1 ~ y .. 1
l
Z•
1 ) )
and also t.he target surfi:\ce c1t pCllnt
The
Ray 2 Intersects the o,191n
•
2(p2=(>:f9~~YI!!l~.Zl'll2».
rays are consIdered to be projected frc,m the object
tVIO
plane with parallel spacing
To~
== xo(recall
that all 01 this
is assumed to tah:? place within the depth 01
pl~DjectiDn
focus of
all optical systems Involved).
The line equations for ray 1 and ray 2 are then:
Ray 1:
( 5)
Ray 2:
:~
2
Itan 8i.,..
(6)
where T ='" = >:=
from
( 1) :
'Z
from
(5) :
ZSl
from
(7)
and
>.:
=
131
B
== >: ell tan 8 .... + 8", ...
1
;{ e 11 tan 8 1
==
...
(7)
+ T= ... /sin 8
(8)
1 ...
(8 )
(B,,~
-
T= ... /sin 8
1 ...
)/(-l/tan 8
1 ...
-
tan 8 .. ><
(9)
.....
Now find the inter' sec t i on at pOInt ..::.
from
(1)
( 10)
from
(6)
( 11)
from
(1 0 )
C\ n
d
(11)
On the reflected Image plane.
T .....
=
>: E!l2
-
>: e
det.lO.'nnine T... :
1
( 13)
T.,.. ==
-T.~/(cos
8~><
+ sin 8 ....
27
tan 8_ ...
( 14)
If TON
is to be considered the period of a sinusoidal object
then T..... would be the perIod of the sInusoidal
=
and f_ ...
III TOM I
l/IT ... 1
• From this an Intermediate solution for
which
Cc\n
reflected image.
f_~
can be obtained
be Llsed to est.ablish quanti:!ation error in t.he PSD
estimdtion af f .... as follows:
f ••,
== abs
lIlT .. ,.)
== e\bs
(cos G~ ....
Considering the practical
,.'
A~l.)-(-1TL':'"
I
"~
8" k
<,
sin Eli ... tan 8_ .... ) f
c ....
(15)
limltatl0ns of
n/2
so
Flnally from
-I-
(16)
(15)
we can solve for the estimated value of 8 ....
(17)
28
ESTIMATION OF e_ v
By slC\ntlng the sur-f;;'\ce plane with a y grCldlent. dz/dy
tanCS. y
)
:=
the phase of the reflected image pattern is found to be
Pl'"opor-tionCll to y(see fIgure #17).
()S')(
~ 0
f}sg ~ 30°
f
o'X
::: 10
Ct'c.tCS
~s~~,,~
figure #17
2
2 bi~ ~ .. a.l'1tl,,~t:A.
h;+ Ill"..... t/~c:d...
'2,
0
f
;"PQ t
& IJ
r fo cr
rfflnf(d
il'f'ld-j'
I,.t~~'it-)'
A simple way to approach thIS phenomenon is to consider all
rays of
light cOITling from a constant amplItude line of the object
SInusoidal pattern.
These rays define a plane which IS further restricted to
intersect the origIn of the primary reference coordinate system.
The equation of
Z
Recall
this plane becomes:
x/tan 8 ......
-
:=
that
(1)
the surface plane
IS
described by the equation
(2 )
en: + by + ::: = c
Cl)
into (2) gives the Pl'"ojection onto the
a~
so y =
+ by >:
x/tan 8 1
=
....
-
a
X 1 -Y1
plane.
C
)/b
29
+ c/b
(3 )
As it tur-ns out. the gr-adient of this pr-ojH:tlon need only be
consider-ed to contInue the der'ivation of the estimate.
dy /
d;-~
= (
lltan 8
tM
-
a)/b
(4 )
From the section on LS estimate we
a
-
b
=- -tan
Substituting
dy Ide:
(7)
=
-
~now
-tan B.,..
(5)
a. v
(6)
(5)
and
(6 )
into
(4 )
glves:
( l/tan 8 iH + tan 6 ... M l/tan 8. v
( 7)
tells us the rate of phase change in the sinusoidal
r-eflecled image with r-espect to x.
~1J;
} 15J
figur-E' #18
~1,
-r.q (
It
of
lS
seen fr-om figur-e #18 the relationship between the period
the "y" SInusoidal and the origJ.nal )-( sinusoidal is:
T.y/T.).( =
so
(8 )
the intermediate value of f . v
is
This relationshIp is valid for B a ,..
and -n/2
< a. v <
n/2
-
n/2 i
e~><
• n/2
As in the case of
fr"equency
f.~,
equation
(9)
can be used to predict
ql.lil.nti-:-atlon err-or-.
Finally the estimated value of a_v is;
( 10)
31
CONCLUSION
The algorIthm In this paper was found to be effective withIn
certain boundary regions of
€lox
dimension 0 and OFT resolution.
and
amy
for a given fractal
To quantitatively define this
boundary a risk funcion 'should be defined fm- ti,e estimation at
anlj Say.
In order" to define a rIsk
dE,rlslty functions for a gIven
(~lthDu\:dh~,
CPU int.ensive,
SI';lX
function~
and
eev
€lex
the probability
need to be defined.
these densIty 'Functlons could be
estimatedlneed only be done once).
This would aid and quide in the
effort to theoretically define the density functions.
If the
densities turned out to be approximately gaussian the problem would
simplify to finding the mean and variance as a function of
Sav>
€lex
and
An area of Investigation for this type of estimation problem
would be phase modulation.
A major source of error in thIs method
WZ1S
quantization of frl?quenr:y in the PSD estimate.
function of OFT resolution.
that of the
This was mainly a
And for a given resolution the
quantization error was not constant but a function frequency.
The error due to reflection attenuation Introduced more
variance of the data.
This limited the boundary
~egion
further.
A second proj ec tor' was introduced into the system
perpendicular to the original
indicated a potential
proJector.
The results of this system
increase in accuracy wlth out increaSing the
estimatIon calculations signlficantly.
The
op~rating
boundary region was an eccentric shape so a
system tilt could be incorporated to accommodate the centering of
the boundary region.
Also in
practlce~
shadowing plays a
key role
in i.ntroducing error(a common IlmltatHln of structured light
methods)
.:lnd coul d be compensat.ed
The fractal
some of
f
or wi th mu 1 tip 1 e proj ector·s.
surfaces in thIS paper were intended to reflect
the generic properties of actual
surfaces.
In practice an
intenSive study of the surface to be estImated would probably prove
very beneficial
simplifyinq t.he
fOt"'
d~'ti=\nnining fp,~~;;;,'\bility
stimatlon probl.em.
of this method
If
not
8IBLIQGBAPHY
[lJ Sine SectioninQ Illumination Method.
Technical
Disclosure BulletIn Vol.
[2] Numerical Recioeal
Press,
[3]
B.
P.
27 No.
L. G.
Hassebrook,
6 November
1984.
The Art of 6cientific Camguting.
Flannery. S.A.
Teukolsky, W.T.
IBM
W.H.
Vetterling.
Detection. Estimation. aDd Modulation Theory. Part I:
Harry
L. Va.n Trees
[4] Fractal-Based Description of Natural Scenem. Alex P. Pentland,
IEEE Trans.
1984, Vol.
on Pattern Analysis and Machine Intelligence.
6,
no.
Nov.
6.
[5] Probability. Random Variable5. and
Stocha6ti~ Proc9~5e5.
Athanasi os r:'apou lis.
[6] Probability and Stgtiatici. MorrIS H. DeGroot.
E]J Th~
Fractal Geometry
of
Nature.
Benolt
[8] Modern Control Thegry. William L.
B.
Mandelbrot.
Brogan.
(9) IntraductlQD to Fpurier Optics. J. W. Goodman.
[10]
~iaital
Pictur@ Proces5ina. Vol.
Rosenfeld and Avinash C.
1 and Vol. 2. Azrlel
f~_ak.
[11] Uigital Signal Processing. Alan V. Oppenheim and Ronald W.
Schafer.
34
CREDITS
Supervision by Dr.
D~'par tmen
t,
K.
B.
Eom,
Electrical and Computer Engineering
Syr ac U<..:;I? Un 1 veT" 5i t y.
Consultation on PSD estimation from Dr. Hong Wang.
Electrical and
Computer Engineering Department. Sy acuse University.
Word processing by Jeannie Hunt.