From: AAAI-02 Proceedings. Copyright © 2002, AAAI (www.aaai.org). All rights reserved.
SetA*: An Efficient BDD-Based Heuristic Search Algorithm
Rune M. Jensen, Randal E. Bryant, and Manuela M. Veloso
Computer Science Department,Carnegie Mellon University,
5000 Forbes Ave, Pittsburgh,PA 15213-3891, USA
{runej,bryant,mmv}@cs.cmu.edu
Abstract
In this paper we combine the goal directed search of
A* with the ability of BDDs to traverse an exponential number of states in polynomial time. We introduce
a new algorithm, SetA*, that generalizes A* to expand
sets of states in each iteration. SetA* has substantial advantages over BDDA*, the only previous BDD-based
A* implementation we are aware of. Our experimental evaluation proves SetA* to be a powerful search
paradigm. For some of the studied problems it outperforms BDDA*, A*, and BDD-based breadth-first search
by several orders of magnitude. We believe exploring
sets of states to be essential when the heuristic function
is weak. For problems with strong heuristics, SetA*
efficiently specializes to single-state search and consequently challenges single-state heuristic search in general.
Introduction
During the last decade, powerful search techniques using an
implicit state representation based on the reduced ordered
binary decision diagram (BDD, Bryant 1986) have been developed in the area of symbolic model checking (McMillan
1993). Using blind exploration strategies these techniques
have been successfully applied to verify systems with very
large state spaces. Similar results have been obtained in
well-structured AI search domains (Cimatti et al. 1997).
However for hard combinatorial problems the search fringe
often grows exponentially with the search depth.
A classical AI approach for avoiding the state explosion
problem is to use heuristics to guide the search toward the
goal states. The question is whether heuristics can be applied to BDD-based search such that their ability to efficiently expand a large set of states in each iteration is preserved. The answer is non-trivial since heuristic search algorithms require values to be associated with each state and
manipulated during search a task for which BDDs often have
proven less efficient.
In this paper, we present a new search algorithm called
SetA*. The main idea is to avoid the above problem by generalizing A* (Hart, Nilsson, & Raphael 1968) from single
states to sets of states in the search queue. Recall that A*
c 2002, American Association for Artificial IntelliCopyright gence (www.aaai.org). All rights reserved.
668
AAAI-02
associates two values g and h with each state in the search
queue. g is the cost of reaching the state and h is an estimate of the remaining cost of reaching the goal given by a
heuristic function. In SetA* states with similar g and h values are merged such that we can represent them implicitly
by a BDD without having to store any numerical information. In each iteration, SetA*: 1) pops the set with highest
priority, 2) computes its next states, and 3) partitions the next
states into child sets with unique g and h values, which are
reinserted into the queue. A straightforward implementation of the three phases has disappointing performance (see
PreSetA*, Table 2). A key idea of our work is therefore
to combine phase 2 and 3. The technique fits nicely with
the so called disjunctive partitioning of BDD-based search
(Clarke, Grumberg, & Peled 1999). In addition it can be applied to any heuristic function. Our experimental evaluation
of SetA* proves it a powerful search paradigm. For some
problems it dominates both A* and BDD-based breadth-first
search (see Table 2). In addition, it outperforms the only previous BDD-based implementation of A* (Edelkamp & Reffel 1998), we are aware of, by up to two orders of magnitude
(see Table 3).
Directed BDD-based search has received little attention
in symbolic model checking. The reason is that the main
application of BDDs in this field is verification where all
reachable states must be explored. For Computation Tree
Logic (CTL) checking, guiding techniques have been proposed to avoid a blow-up of intermediate BDDs (Bloem,
Ravi, & Somenzi 2000). However these techniques are not
applicable to search since they are based on defining lower
and upper bounds on the fixed-point. Directed search techniques are relevant for falsification where the goal is to find
a state not satisfying an invariant. As far as we know, BDDbased directed search was first considered for this application (Yang & Dill 1998). The proposed algorithm is a simple best-first search where the search fringe is partitioned
with a specialized BDD-operator according to the Hamming
distance to the goal state (number of different bits). Even
though this operation is fairly efficient for the Hamming
distance, it is not obvious how to define it in general. The
only previous BDD-based implementation of A* that we are
aware of, is BDDA* (Edelkamp & Reffel 1998). BDDA*
can use a general heuristic function and has been applied to
planning as well as model checking. However, BDDA* re-
h=0 (0,1)
c
G
(1,1) h=0
b
d
h=1 (0,0)
i
a
(1,0) h=1
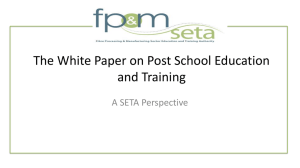
Figure 1: An example search problem consisting of four
states and four transitions a,b,c, and d. The dashed lines indicate the two search fringes of a BDD-based breadth-first
search from the initial state i = (0, 0) to the goal states
G = {(1, 1)}. The h-values is a heuristic function equal
to the vertical goal distance.
quires arithmetic operations at the BDD level during search
and includes no tools to control the growth of the search
fringe or for cycle detection. In practice this often leads
to substantial performance penalties (see Table 3). Another
limitation of BDDA* is that the generalization to weighted
A* is non-trivial.
The remainder of the paper is organized as follows. First
we briefly describe BDDs and BDD-based search techniques. We then define the SetA* algorithm and evaluate
it experimentally in a range of search and planning domains.
Finally we draw conclusions and discuss directions for future work.
BDD-based Search
A BDD is a directed acyclic graph representing a Boolean
function on a set of ordered variables. Due to two reduction rules the BDD is a canonical and compact representation. Another advantage is that a large set of BDDs can share
structure in a multi-rooted BDD and be efficiently manipulated by a general function for applying Boolean operators.
Due to the space limitations of this paper we will treat BDDs
as a black-box. Readers interested in a thorough introduction are referred to (Bryant 1986).
A search problem is a 4-tuple (S, T, i, G). S is a set
of states. T : S × S is a transition relation defining the
search graph. (s, s ) ∈ T iff there exists a transition leading from s to s . i is the initial state of the search while
G is the set of goal states. A solution to a search problem
is a path π = s0 , · · · , sn where s0 = i and sn ∈ G and
n−1
j=0 (sj , sj+1 ) ∈ T . Assuming that states can be encoded
as bit vectors, BDDs can be used to represent the characteristic function of a set of states and the transition relation. To
make this clear, consider the simple search problem shown
in Figure 1. A state s is represented by a bit vector with two
elements s = (s0 , s1 ). Thus the initial state is represented
by a BDD for the expression ¬s0 ∧ ¬s1 . Similarly we have
G = s0 ∧ s1 . To encode the transition relation, we need to
refer to current state variables and next state variables. We
adopt the usual notation in BDD literature of primed vari-
ables for the next state
T (s0 , s1 , s0 , s1 ) = ¬s0 ∧ ¬s1 ∧ s0 ∧ ¬s1
∨ ¬s0 ∧ ¬s1 ∧ ¬s0 ∧ s1
∨ ¬s0 ∧ s1 ∧ s0 ∧ s1
∨ s0 ∧ s1 ∧ s0 ∧ ¬s1 .
The main idea in BDD-based search is to stay at the BDD
level when finding the next states of a set of states. This can
be done by computing the image of a set of states V encoded
in current state variables
Img = ∃s . V (s) ∧ T (s, s ) [s/s ].
Consider the first step of the search from i in the example
domain. We have V (s0 , s1 ) = ¬s0 ∧ ¬s1 . Thus,
Img = ∃s . ¬s0 ∧ ¬s1 ∧ T (s0 , s1 , s0 , s1 ) [s/s ]
= s0 ∧ ¬s1 ∨ ¬s0 ∧ s1 [s/s ]
= s0 ∧ ¬s1 ∨ ¬s0 ∧ s1 .
A common problem in BDD-based search is that intermediate BDDs in the image computation tend to be large compared to the BDD representing the result. In symbolic model
checking, a range of techniques has been proposed to avoid
this problem. Among the most successful of these are transition relation partitioning. For search problems, where each
transition normally only modifies a small subset of the state
variables, the suitable partitioning technique is disjunctive
partitioning (Clarke, Grumberg, & Peled 1999). To make a
disjunctive partitioning, the part of the individual transition
expressions keeping the unmodified variables unchanged is
removed. The transition expressions are then partitioned according to what variables they modify. For our example we
get two partitions
P1
m1
P2
m2
= ¬s0 ∧ ¬s1 ∧ s0 ∨ ¬s0 ∧ s1 ∧ s0
= (s0 )
= ¬s0 ∧ ¬s1 ∧ s1 ∨ s0 ∧ s1 ∧ ¬s1
= (s1 ).
In addition to large space savings, disjunctive partitioning
often lowers the complexity of the image computation which
now can skip the quantifications on unchanged variables and
operate on smaller expressions
Img =
|P|
∃mj . V (s) ∧ Pj (s, mj ) [mj /mj ].
j=1
SetA*
SetA* is a generalization of weighted A* where the definition of f is changed from f = g + h to f = (1 −
w)g + wh, w ∈ [0, 1] (Pohl 1970). Similar to BDDA*,
SetA* assumes a finite search domain and unit-cost transitions. SetA* expands a set of states instead of just a single state. The main input is what we will call, an improvement partitioning. That is, a disjunctive partitioning where
the transitions of a partition reduce the h-value by the same
amount. The improvement partitioning is non-trivial to compute. The reason is that it may be intractable to calculate
AAAI-02
669
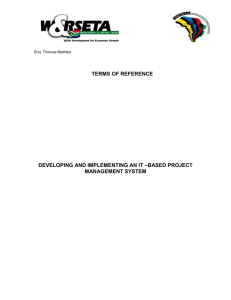
function SetA*(IP, init, goal , u, w)
1
Q.initialize(u, w, goal)
2
g←0
3
h ← h(init)
4
Q.insert(init, g, h)
5
R.update(init, g)
6
while ¬Q.empty() and ¬Q.topAtGoal ()
7
top ← Q.pop()
8
for j = 0 to |IP|
9
next ← image(top, IP j )
10
R.prune(next)
11
g ← top.g + 1
12
h ← top.h − impr (IP j )
13
Q.insert(next, g, h)
14
R.update(next, g)
15 if Q.empty() then NoPathExists
16
else R.extractPath()
Figure 2: The SetA* algorithm.
each transition expression in turn. Fortunately large sets of
transitions are often described in more abstract terms (e.g.,
by actions or guarded commands) that can be directly translated into BDDs. This allows for an implicit way to partition
a set of transitions according to their improvement. Assume
that a set of transitions are represented by a BDD T (s, s ).
Given a BDD h(s, v ) encoding the heuristic function, such
that v is a bit vector representation of the h-value associated
with state s, the set of transitions with improvement equal to
k is
T (s, s ) ∧ h(s, v ) ∧ h(s , v ) ∧ v − v = k.
The improvement partitioning is computed only once prior
to the search, and in practice it turns out that it often can be
produced directly from the description of transitions or by
splitting the disjunctive partitioning. In fact, for the heuristics we have studied so far, no BDD encoding of the heuristic
function has been necessary.
SetA* uses two main data structures: a prioritized queue
Q and a reach structure R. Each node in Q contains a BDD
representing a set of states with particular g and h values.
The node with lowest f -value has highest priority. Ties are
solved by giving highest priority to the entry with lowest hvalue. An important parameter of Q is an upper bound u
on the BDD sizes. When inserting a new node it is unioned
with an existing node in Q with the same g and h value if
the sum of the size of their two BDDs is less than u. Otherwise a new entry is created for the node. The reach structure
is for loop detection. R keeps track of the lowest g-value
of every reached state and is used to prune states from a set
of next states already reached with a lower g-value. The algorithm is shown in Figure 2. All sets and set operations
are carried out with BDDs. SetA* takes five arguments. IP
is the improvement partitioning described above. init and
goal are the initial and goal states of the search. u is the
upper bound parameter of Q and w is the usual weight parameter of weighted A*. Initially the algorithm inserts the
670
AAAI-02
initial state in Q. Observe that the h-value of the initial state
has to be found. However since init is a single state this is
trivial. Similar to the regular A* algorithm, SetA* continues
popping the top node of the queue until the queue is either
empty or the states of the top node overlaps with the goal.
The top node is expanded by finding the image of it for each
improvement partition in turn (l.9). Before being inserted
in Q, the new nodes are pruned for states seen at a lower
search depth, and the reach structure is updated (l.10-14). If
the loop was aborted due to Q being empty no solution path
exists. Otherwise the path is extracted by applying transitions backwards on the states in R from one of the reached
goal states.
SetA* is sound due to the soundness of the image computation. Since no states reached by the search are pruned,
SetA* is also complete. Given an admissible heuristic and
w = 0.5, SetA* further finds optimal length paths. As for
A*, the reason is that a state on the optimal path eventually
will reach the top of Q because states on finalized but suboptimal paths have higher f -value (Pearl 1984).
The upper bound u can be used to adjust how many states
SetA* expands. If each partition in IP contains a single
transition and u = 0 then SetA* specializes to A*. For
problems with many shortest length solution paths like the
DVM and Logistics described in the next section, it may be
an advantage to focus on a subset of them by choosing a
low u-value. A similar approach is used by A∗ described in
(Pearl 1984)
The weight w has the usual effect. For w = 0.5 Set A* behaves like A*. For w = 1.0 it performs best-first search, and
for w = 0.0 it carries out a regular breadth-first search. The
fact that w can take any value in the range [0, 1] is important
in practice, since it can be used to increase an underestimating heuristic or decrease an overestimating heuristic.
We end this section by demonstrating SetA* on our example problem. For this demonstration we assume w = 0.5
and u = ∞. The heuristic function is the vertical distance
to the goal state. In Figure 1 the states have been labeled
with h-values. We see that IP must contain at least three
partitions: one containing transition d that improves by minus one, one containing a and c that improve by zero, and
one containing b that improves by one. Initially we have
Q0 = < (f = 0.5, g = 0, h = 1, {(0, 0)}) >
R0 = < (g = 0, {(0, 0)}) > .
In the first iteration, state (0, 0) is expanded to one child
containing state (1, 0) and one child containing (0, 1). According to the improvements of the partitions, we get
Q1 = < (f = 0.5, g = 1, h = 0, {(0, 1)}),
(f = 1.0, g = 1, h = 1, {(1, 0)}) >
R1 = < (g = 0, {(0, 0)}), (g = 1, {(0, 1), (1, 0)}) > .
In the second iteration, only the c transition can fire resulting
in
Q2 = < (f = 1.0, g = 2, h = 0, {(0, 1)}),
(f = 1.0, g = 1, h = 1, {(1, 0)}) >
R2 = < (g = 0, {(0, 0)}), (g = 1, {(0, 1), (1, 0)}),
(g = 2, {(1, 1)}) > .
The tie breaking rule causes the goal state to be at the top
of Q at the beginning of the third iteration. Thus the while
loop is aborted and the solution path (0, 0), (0, 1), (1, 1) is
extracted from R2 .
k
0
2
4
6
8
10
12
14
Experimental Evaluation
SetA* has been implemented in the UMOP multi-agent
planning framework (Jensen & Veloso 2000) to study its performance characteristics relative to blind bidirectional BDDbased breadth-first search (also implemented in UMOP) and
an A* implementation with explicit state representation and
cycle detection. In a second evaluation round we developed a domain independent STRIPS planning system called
DOP. The state encoding and heuristic function used by the
MIPS planner (Edelkamp & Helmert 2001) was reproduced
in order to conduct a fair comparison with BDDA* implemented in MIPS. In addition to SetA*, two blind BDD-based
breadth-first search algorithms were implemented in DOP,
one searching forward and one searching backward.
All experiments were carried out on a Linux 5.2 PC with
a 500 MHz Pentium 3 CPU, 512 KB L2 cache and 512
MB RAM. The time limit (TIME) was 600 seconds and the
memory limit (MEM) was 450 MB. For UMOP and DOP
the number allocated BDD nodes of the BDD-package and
the number of partitions in the disjunctive partitioning were
hand-tuned for best performance.
Artificial Problems
Two problems IGk and Dx V y M z were defined and studied using the minimum Hamming distance to a goal state
as heuristic function. In these experiments the improvement
partitioning was computed by splitting a disjunctive partitioning using a specialized BDD-function. Given an improvement k, this function traverses the BDD of an action
and picks transitions of the action improving k. The complexity of the function is linear in the size of the action BDD
when the goal is a conjunction and the variable ordering interleaves current and next state variables.
IGk This problem is simplest to define using the STRIPS
language (Fikes & Nilsson 1971). A state is a set of facts
and an action is a triple of sets of facts. In a given state S,
an action (pre, add , del ) is applicable if pre ⊆ S, and the
resulting state is S = (S ∪ add ) \ del . The actions are
A11
pre : {I ∗ }
add : {G1 }
del : {}
A1j j = 2, · · · , n
pre : {I ∗ , Gj−1 }
add : {Gj }
del : {}
A2j j = 1, · · · , n
pre : {}
add : {Ij }
del : {I ∗ }.
The initial state is {I ∗ } and the goal state is
{Gj |k < j ≤ n}. Only A1j actions should be applied to reach the goal. Applying an A2j action in any
state leads to a wild path since I ∗ is deleted. The only
solution is A11 , · · · , A1n which is non-trivial to find, since
the heuristic gives no information to guide the search on the
first k steps. The purpose of the experiment is to investigate
how well SetA* copes with this situation compared to A*.
For SetA* w = 0.5 and u = ∞. n of IGk is 16. The
results are shown in Table 1. The experiment shows a
SetA*
Time #it
0.2 16
0.2 16
0.2 16
0.2 16
0.2 16
0.2 16
0.2 16
0.2 16
A*
Time
0.1
0.4
7.4
80.1
344.0
TIME
TIME
TIME
#it
16
145
2861
24931
90080
-
Table 1: Results for the IGk problem. Time is in seconds.
#it is the number of iterations.
3
2
6
1
0
5
4
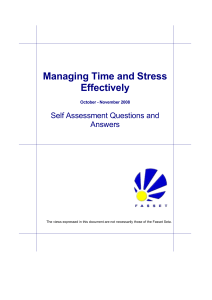
Figure 3: The initial state of D5 V 3 M 7 .
fast degradation of A*’s performance with the number of
unguided steps. A* gets lost expanding an exponentially
growing set of states on wild paths. SetA* is hardly
affected by the lack of guidance. The reason is that all
transitions on the unguided part improve by zero. Thus on
this part, SetA* performs a regular BDD-based breadth-first
search, which scales well due to the structure of the problem.
Dx Vy Mz In this domain a set of sliders are moved between the corner positions of hypercubes. In any state, a
corner position can be occupied by at most one slider. The
dimension of the hypercubes is y. There are z sliders of
which x are moving on the same cube. The remaining z − x
sliders are moving on individual cubes. Figure 3 shows the
initial state of D5 V 3 M 7 . The purpose of Dx V y M z is to
investigate the performance of SetA* for hard combinatorial problems relative to A* and BDD-based breadth-first
search. In this experiment we study the Dx V 4 M 15 problem. We also show the results of PreSetA*, a earlier version of SetA* finding the next states and splitting them in
two separate phases. Both versions of SetA* were run with
w = 0.5 and u = 200. The results are shown in Table 2.
For this problem disjunctive partitioning of the transition relation is crucial for large values of x. Despite applying this
technique, BDD-based bidirectional search does not scale
due to a blow-up of the search fringe in both directions. A*
works well when x is small since f is a perfect or near perfect discriminator. However when the quality of the heuristic degrades A* gets lost tracking equally promissing paths.
The good performance of SetA* is due to the upper bound
setting that focuses the search on a reasonable subset of the
paths. Interestingly the search time is very low even for the
hardest problems. Time and memory are spent on building
and splitting the transition relation. Separating the next state
AAAI-02
671
x
1
2
3
4
5
6
7
8
9
10
11
12
SetA*
0.6
0.7
0.6
0.6
0.6
0.8
1.3
2.1
6.8
16.3
39.3
MEM
PreSetA*
0.8
0.9
1.4
1.5
3.5
14.4
39.8
50.7
202.6
297.2
TIME
TIME
A*
1.1
1.1
1.1
1.1
1.0
TIME
TIME
TIME
TIME
TIME
TIME
TIME
BiDir
0.7
0.7
1.6
8.1
334.0
TIME
TIME
TIME
TIME
TIME
TIME
TIME
Table 2: Results for the Dx V 4 M 15 problem.
computation and the splitting as done by the earlier version
of SetA* seems to come with a large performance penalty.
Planning Problems
Like MIPS, the DOP planning system uses an approximation
to the HSPr heuristic (Bonet & Geffner 1999) for STRIPS
domains. In addition, it performs similar analysis to minimize the state encoding length. HSPr is an efficient but nonadmissible heuristic. We approximate it by summing the
depth d(f ) of each fact in a state given by a relaxed forward
breadth-first search. The heuristic is applied in a backward
search from the goal states to the initial state. For any action (pre, add , del ) leading from S to S (when applied in
forward direction), we assume
del ⊆ pre and add ⊆ pre.
Since the search is backward the improvement of the action
is
impr
= h(S ) − h(S)
= h(S ∩ (pre ∪ add )) − h(S ∩ (pre ∪ add ))
d(f ) −
d(f ).
=
f ∈add\S
f ∈del
Thus the improvement of an action can be computed without
any BDD-based encoding of the heuristic function. Each
action is partitioned in up to 2|add| sets of transitions with
different improvement.
The problems, we consider, are Gripper from the STRIPS
track of the AIPS-98 planning competition (Long 2000) and
Logistics from the first round of the STRIPS track of the
AIPS-00 planning competition (Bacchus 2001). The purpose of these experiments is to compare the performance of
SetA* and BDDA*, not to solve the problems particularly
fast. In that case, a more informative heuristic like the FF
heuristic (Hoffmann 2001) should be applied.
Gripper This domain considers a robot with two grippers moving an increasing number of balls between two
connected rooms. The first experiment compares forward
BDD-based breadth-first search, SetA* with w = 1.0 and
u = ∞, backward BDD-based breadth-first search, pure
672
AAAI-02
#p
2
4
6
8
10
12
14
16
18
20
Forward
0.1
0.2
0.4
0.9
1.2
1.7
2.2
3.5
3.9
5.0
SetA*
0.1
0.3
0.6
1.0
1.4
2.0
2.7
3.5
4.9
5.8
Backward
0.1
0.6
1.4
2.9
5.3
9.1
17.2
19.7
27.5
37.2
Pure
BDDA*
3.97
8.01
22.37
72.54
317.15
TIME
TIME
TIME
TIME
TIME
BDDA*
3.89
7.13
15.36
47.08
TIME
TIME
TIME
TIME
TIME
TIME
Table 3: Results of the first gripper experiment. #p is the
problem number and time is in seconds.
w
0.0
0.2
0.4
0.6
0.8
1.0
|p|
125
125
125
125
125
125
#it
360
354
338
204
204
204
Time
7.6
7.9
8.0
6.1
6.2
5.9
Table 4: Results of the second gripper experiment for problem 20. w is the weight, |p| is the solution length and #it is
the number of iterations. Time is in seconds.
BDDA* and BDDA*. Pure BDDA* performs best-first
search. The results are shown in Table 3. All algorithms
find optimal length solutions. BDDA* spends up to 10% of
the time computing BDD formulas for the arithmetic operations. During the search even the moderate growth of the
search fringe impairs the efficiency considerably. The problem turns out to be most efficiently solved with BDD-based
breadth-first search. However it is challenged by SetA* even
though this algorithm relies on the slower backward expansion.
The second experiment shows the impact of the weight
setting in problem 20. The results are shown in Table 4.
Even though SetA* can solve the problem performing
breadth-first search the heuristic improves its performance.
Logistics This domain considers moving packages with
trucks between sub-cities and with airplanes between cities.
In the first experiment SetA* was run with w = 1.0 and
u = 200. The results are shown in Table 5. The HSPr
heuristic is very efficient in this domain. The solutions of
BDDA* are a couple of steps shorter than the solutions of
SetA*. SetA* and pure BDDA* produce plans of similar
quality. Again the construction of arithmetic formulas takes
up considerable time for BDDA*. The upper bound of 200
speeds up SetA* on the last five problems where the fringe
BDDs otherwise grow considerably.
The second experiment was carried out on problem 7 of
the Logistics domain. In this experiment SetA* was run with
u = ∞. The results are shown in Table 6. As depicted HSPr
SetA*
#p
4
5
6
7
8
9
10
11
12
13
14
15
0.2
0.3
0.3
0.9
1.0
0.9
2.5
2.2
2.0
8.5
7.7
7.3
Pure
BDDA*
6.5
6.7
6.7
13.9
14.1
14.0
25.1
25.2
24.9
57.5
56.7
53.9
Forward
0.3
0.5
0.4
99.0
59.5
100.0
MEM
MEM
MEM
MEM
MEM
MEM
BDDA*
7.7
9.5
8.4
TIME
138.5
132.6
TIME
TIME
TIME
TIME
TIME
TIME
Backward
0.38
0.81
0.94
396.93
TIME
TIME
TIME
TIME
TIME
TIME
TIME
TIME
Table 5: Results of the first logistics experiment. #p is the
problem number and time is in seconds.
w
0.0
0.2
0.4
0.6
0.8
1.0
|p|
25
25
25
29
31
31
#it
279
203
102
49
31
31
Time
8.6
8.9
4.7
0.9
0.8
0.9
Table 6: Results of the second logistics experiment. w is
the weight, |p| is the solution length and #it is the number of
iterations. Time is in seconds.
is a good heuristic for this domain increasing the speed significantly while preserving a relative high solution quality.
Conclusion and Outlook
In this paper, we have successfully combined BDD-based
search and heuristic search into a new search paradigm. The
experimental evaluation of SetA* proves it a powerful algorithm often several orders of magnitude faster than BDDbased breadth-first search and A*. Today planning problems
are efficiently solved by heuristic single-state search algorithms. However as recently noticed, the success may be due
to an inherent simplicity of the benchmark domains when
using the right heuristics (Hoffmann 2001). For less domaintuned heuristics, we believe that the ability of SetA* to explore an exponentially growing set of paths in polynomial
time is essential. Our ongoing research includes identifying
such problems and comparing the performance of SetA* and
single-state search algorithms.
Acknowledgments
This research is sponsored in part by the Danish Research Agency
and the United States Air Force under Grants Nos F30602-00-20549 and F30602-98-2-0135. The views and conclusions contained
in this document are those of the authors and should not be interpreted as necessarily representing the official policies or endorsements, either expressed or implied, of the Defense Advanced Research Projects Agency, the Air Force, or the US Government.
References
Bacchus, F. 2001. AIPS’00 planning competition : The
fifth international conference on artificial intelligence planning and scheduling systems. AI Magazine 22(3):47–56.
Bloem, R.; Ravi, K.; and Somenzi, F. 2000. Symbolic
guided search for CTL model checking. In Proceedings of
the 37th Design Automation Conference (DAC’00), 29–34.
ACM.
Bonet, B., and Geffner, H. 1999. Planning as heuristic
search: New results. In Proceedings of the European Conference on Planning (ECP-99). Springer.
Bryant, R. E. 1986. Graph-based algorithms for boolean
function manipulation. IEEE Transactions on Computers
8:677–691.
Cimatti, A.; Giunchiglia, E.; Giunchiglia, F.; and Traverso,
P. 1997. Planning via model checking: A decision procedure for AR. In Proceedings of the 4th European Conference on Planning (ECP’97), 130–142. Springer.
Clarke, E.; Grumberg, O.; and Peled, D. 1999. Model
Checking. MIT Press.
Edelkamp, S., and Helmert, M. 2001. MIPS the
model-checking integrated planning system. AI Magazine
22(3):67–71.
Edelkamp, S., and Reffel, F. 1998. OBDDs in heuristic
search. In Proceedings of the 22nd Annual German Conference on Advances in Artificial Intelligence (KI-98), 81–
92. Springer.
Fikes, R. E., and Nilsson, N. J. 1971. STRIPS: A new
approach to the application of theorem proving to problem
solving. Artificial Intelligence 2:189–208.
Hart, P. E.; Nilsson, N. J.; and Raphael, B. 1968. A
formal basis for heuristic determination of minimum path
cost. IEEE Transactions on SSC 100(4).
Hoffmann, J. 2001. Local search topology in planning
benchmarks: An empirical analysis. In Proceedings of
the 17th International Joint Conference on Artificial Intelligence (IJCAI-01), 453–458. Morgan Kaufmann.
Jensen, R., and Veloso, M. M. 2000. OBDD-based universal planning for synchronized agents in non-deterministic
domains.
Journal of Artificial Intelligence Research
13:189–226.
Long, D. 2000. The AIPS-98 planning competition. AI
Magazine 21(2):13–34.
McMillan, K. L. 1993. Symbolic Model Checking. Kluwer
Academic Publ.
Pearl, J. 1984. Heuristics : Intelligent Search Strategies
for Computer Problem Solving. Addison-Wesley.
Pohl, I. 1970. First results on the effect of error in heuristic
search. Machine Intelligence 5:127–140.
Yang, C. H., and Dill, D. L. 1998. Validation with guided
search of the state space. In Proceedings of the 35th Design
Automation Conference (DAC’98), 599–604. ACM.
AAAI-02
673