A Compressible “ Poor Man ’
advertisement

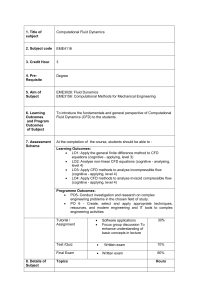
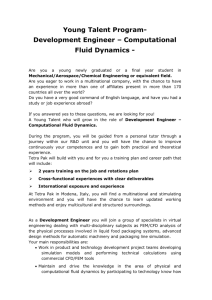
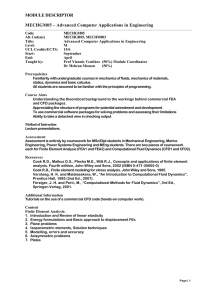
A Compressible “Poor Man’s Navier−Stokes” Discrete Dynamical System Chetan Babu Velkur vcbabu@uky.edu J. M. McDonough jmmcd@uky.edu Department of Mechanical Engineering University of Kentucky, Lexington, KY 40506 Reported work supported by NASA EPSCoR Presented at the 58’th Annual DFD Meeting of APS, Nov. 20-22, 2005 Chicago, IL Advanced Computational Fluid Dynamics CFD Motivation for New Approach to Turbulence Modeling • Direct Numerical Simulation (DNS): no modeling, permits interaction of turbulence with other physics on smallest scales. Run times for DNS ∼ Ο(Re3). • Reynolds Averaged Navier stokes (RANS): essentially all modelling, small-scale interactions impossible. Computes fairly quickly. • Large−Eddy Simulation (LES): some modeling; but current models not able to treat details of SGS interactions. Run times for LES ∼ • Ο(Re2). Filtering of equations as done in traditional LES leads to the fundamental problem of mapping: Physics Statistics Advanced Computational Fluid Dynamics CFD The New Approach ⎯ Use of Synthetic Velocity • Approach taken by Advanced CFD Group (UK) • Dependent variable decomposition same as LES. • Mimic physics of SGS fluctuations, i.e., u*, v*, w* are modeled. • Filter solutions not equations. • N.−S. equations now take the form, U (x, t ) = ∼ u (x, t ) + u* (x, t ) . ∼ ∼+ u*) ∇(u∼+ u*) = −∇( ∼ (u + u*) + (u p + p*) + 1/Re Δ ( ∼ u + u*) t Directly compute ∼ u and ∼ p, model u* and p*. U = u + u* and P = p∼ + p* ∼ • Advanced Computational Fluid Dynamics CFD The New Approach ⎯ Use of Synthetic Velocity (cont.) • Form used to find fluctuating velocity components, u* = A M A – amplitude factor deduced from an extension of Kolmogorov theories. M – modeled employing a discrete dynamical system (DDS) . • Formulation is applied at each discrete grid point and time level. • “The Poor man’s Navier− Stokes equations” (PMNS) in 2D. an+1 = β1 an (1− an ) − γ1 an bn bn+1 = β2 bn (1 − bn ) − γ2 an bn • These DDS are derived directly from momentum equations. Advanced Computational Fluid Dynamics CFD Use of PMNS equations in Turbulence Modeling 2-D Incompressible Turbulent Convection: • Experimental data taken from, J. P. Gollub, S. V. Benson “Many routes to turbulent convection,” J. Fluid Mech. 100, pp. 449- 470, 1980. • Computed results from, J. M. McDonough, J. C. Holloway and M. G. Chong “ A discrete dynamical system model of temporal flucuations in turbulent convection” being prepared to be sent to J. Fluid Mech. Advanced Computational Fluid Dynamics CFD Derivation of 3 − D Compressible PMNS equations • Scaling of the governing equations of compressible flow gives, ρ t + ∇ ⋅ (ρU ) = 0 1 1 DU ρ =− ∇p + ∇τ ij 2 Dt Re γM DE 1 1 1 ( ) ( ) pU k T ρ =− ∇ ⋅ + ∇ ⋅ ∇ + φ 2 Dt Pe Re γM ⎛ ∂u i ∂u j + τ ij = μ ⎜⎜ ⎝ ∂x j ∂xi Equation of state: ∂u i ⎞ ⎟ + δ ij λ∇ ⋅ U , φ = τ ij ⎟ ∂x j ⎠ p = ρT Advanced Computational Fluid Dynamics CFD Derivation of 3 − D Compressible PMNS equations (cont.) • Assume Fourier representations for ρ, u, v, w, p, E ∞ ∞ v (x,t) = ∑ ck(t) ϕk(x) , w (x,t) =k=∑-∞gk(t) ϕk(x) u (x,t) = ∑bk(t) ϕk(x) , k=-∞ k=-∞ ∞ ρ (x,t) = ∑ ak(t) ϕk(x) , k=-∞ ∞ ∞ ∞ P (x,t) = ∑ ek(t) ϕk(x) , E (x,t) = ∑ hk(t) ϕk(x) k=-∞ k=-∞ ∞ assume ϕk to be orthonormal and in Co • Apply Galerkin procedure • Substitute solution representations into governing equations . • Commute differentiation and summation. • Calculate Galerkin inner products. • Reduce to a single wave vector. • Construct forward Euler discretisation, rearrange to define bifurcation parameters to get PMNS equations. Advanced Computational Fluid Dynamics CFD 3− D Compressible PMNS equations • PMNS equations for 3-D compressible flow: a n +1 = a n − γ 11 a n b n − γ 12 a n c n − γ 13 a n g n [ ] [ ] [ ] ( ) 1 1 ⎡1 1 1 n n n n n⎤ α b ψ e χ b ς c ς g − + + + 1 1 1 2 ⎥⎦ 3 3 an a n ⎢⎣ 3 ( ) 1 1 n n α c ψ e − + 2 an an ) 1 1 ⎡1 1 1 n n n n n⎤ α c ψ e χ g ς b ς c − + + + 3 3 2 3 ⎥ 3 3 an a n ⎢⎣ 3 ⎦ b n +1 = β 1b n 1 − b n − γ 21b n c n − γ 22 b n g n + αb n + c n +1 = β 2 c n 1 − c n − γ 31b n c n − γ 32 c n g n + αc n + ( g n +1 = β 3 g n 1 − g n − γ 41b n g n − γ 42 c n g n + αg n + h n +1 = h n − γ 51 h n b n − γ 52 h n c n − γ 53 h n g n − ( ) + (c ) + (g ) ⎤⎥ + + 1 ⎡4 n ξ1 b a n ⎢⎣ 3 + 1 an 2 n 2 n 2 ⎦ [ 1 1 ⎡1 ⎤ n n χ c ς b ς3g n ⎥ + + 2 ⎢3 2 3 3 ⎣ ⎦ ] 1 1 n n n n n n η e b + η e c + η e g + κT n 1 2 3 n n a a ( ) + (b ) + (g ) ⎤⎥ + 1 ⎡4 n ξ2 c a n ⎢⎣ 3 2 n 2 n 2 ⎦ ( ) + (b ) + (c ) ⎤⎥ 1 ⎡4 n ξ3 g a n ⎢⎣ 3 2 n 2 n 2 ⎦ ⎡ ⎛2 n n⎞ ⎛2 n n⎞ ⎛ 2 n n ⎞⎤ ⎢λ1 ⎜ 3 b c ⎟ + λ 2 ⎜ 3 c g ⎟ + λ1 ⎜ 3 b g ⎟⎥ ⎠ ⎝ ⎠ ⎝ ⎠⎦ ⎣ ⎝ Advanced Computational Fluid Dynamics CFD Bifurcation Parameters • 3− D compressible PMNS equations has thirty six bifurcation parameters. • Bifurcation parameters can be grouped into three families corresponding to whether they depend on Re, M or strain rates. • Is there a closure problem? • All bifurcation parameters are calculated using the resolved part of LES and hence known before hand. Advanced Computational Fluid Dynamics CFD Time Series and Power Spectral Density TIMESERIES PSD Periodic Subharmonic TIMESERIES PSD NoisySubharmonic NoisyPhase lock NoisyQuasi-Periodic with fund. Phase lock Quasi-periodic NoisyQuasi-Periodic without fund. Broadbandwith fund. Broadbandwith dif. fund. Broadbandwithout fund. Advanced Computational Fluid Dynamics CFD Regime Maps (Bifurcation Diagrams) ⎛ τz k2⎞ ⎟ β1 = 4 ⎜1 − ⎜ Re ⎟⎠ ⎝ 1 γ 11 = τ Blm ,k ψ1 = Advanced Computational Fluid Dynamics τ k1 γ M2 CFD Summary • Shortcomings of present day turbulence models was presented. • Use of synthetic velocity in turbulence modeling was presented. • Derivation of 3-D compressible PMNS was presented. • 3-D compressible PMNS produces all non-trivial types of behavior as observed for the incompressible case. Advanced Computational Fluid Dynamics CFD