An Alternative Discretization and Solution Procedure for the Dual Phase-Lag Equation
advertisement

An Alternative Discretization and Solution
Procedure for the Dual Phase-Lag Equation
J. M. McDonough ∗,
Departments of Mechanical Engineering and Mathematics, University of
Kentucky, Lexington, Kentucky 40506-0503, USA
I. Kunadian, R. R. Kumar,
Department of Mechanical Engineering, University of Kentucky, Lexington,
Kentucky 40506-0503, USA
T. Yang
Convergent Thinking, LLC, Madison, WI 53719, USA
Abstract
Alternative discretization and solution procedures are developed for the 1-D dual
phase-lag (DPL) equation, a partial differential equation for very short time, microscale heat transfer obtained from a delay partial differential equation that is
transformed to the usual non-delay form via Taylor expansions with respect to
each of the two time delays. Then in contrast to the usual practice of decomposing
this equation into a system of two equations, we utilize this formulation directly.
Truncation error analysis is performed to show consistency and first-order temporal
accuracy of the discretized 1-D DPL equation, and it is shown by von Neumann
stability analysis and numerical results that the proposed numerical technique is
unconditionally stable. The overall approach is then extended to three dimensions
via Douglas–Gunn time-splitting, and a simple argument for stability is given for
the time-split formulation. Based on a straightforward arithmetic operation count,
qualitative comparisons are made with explicit and iterative methods with the expected result that the current approach is generally significantly more efficient, and
this is demonstrated with CPU-time results. Application of Richardson extrapolation in time is then investigated to improve the first-order temporal accuracy, and
finally, it is shown that numerical predictions agree with available experimental data
during sub-picosecond laser heating of a thin film.
Key words: microscale, heat transport equation, phase lags, delay equations, von
Neumann stability, truncation error, Douglas–Gunn time splitting
Preprint submitted to Elsevier Science
11 August 2005
1
Introduction
Fourier’s law predicts infinite-velocity propagation of thermal disturbances,
implying that a thermal perturbation applied at any location in a solid medium
can be sensed immediately anywhere else in the medium (violating precepts of
special relativity). Associated with this is the fact that the parabolic character
of the heat equation obtained from Fourier’s law implies that heat flow starts
(stops) simultaneously with appearance (disappearance) of a temperature gradient, thus violating the causality principle which states that two causally
correlated events cannot happen at the same time; rather, the cause must
precede the effect, as noted by Cimmelli [1]. In order to ensure finite propagation of thermal disturbances a hyperbolic heat conduction equation (HHCE)
was proposed at least as early as the studies of Luikov [2] and Baumeister and
Hamil [3]. We remark that this equation is of the same form as that termed the
“telegraph equation” in the mathematics literature (see essentially any intermediate PDE text). More recently, it has been shown that in certain situations
HHCEs violate the second law of thermodynamics resulting in physically unrealistic temperature distributions such as temperature overshoot phenomena
observed in a slab subject to a sudden temperature rise on its boundaries
(see, e.g., Taitel [4]). Also, since the classical Fourier and hyperbolic models
neglect thermalization time (time for electrons and lattice to reach thermal
equilibrium) and relaxation time of the electrons, their applicability to very
short-pulse laser heating becomes questionable, as noted by Qiu and Tien [5,6]
and Qiu et al. [7].
Kagnov et al. [8] were among the first to theoretically evaluate the microscopic
(thermal) exchange between electrons and the lattice. Following this, Anisimov
et al. [9] proposed a two-step model to describe electron and lattice temperatures, Te and Tl , respectively, during the short-pulse laser heating of metals.
Later, Qiu and Tien [5,6] rigorously derived the hyperbolic two-step model
from the Boltzmann transport equation for electrons. They then numerically
solved the model equations for the case of a 96fs duration laser pulse irradiating a thin film of thickness 0.1 µm. The predicted temperature change of the
electron gas during the picosecond transient agreed well with experimental
data, supporting validity of the hyperbolic two-step model for describing heat
transfer mechanisms during short-pulse laser heating of metals.
Even though this microscopic model works quite well at small scales, when
investigating macroscopic effects a different model might be desirable. Tzou
proposed the dual phase-lag (DPL) model [10–13] that reduces to diffusion,
∗ Corresponding author.
Email addresses: jmmcd@uky.edu (J. M. McDonough), ikuna0@engr.uky.edu
(I. Kunadian), rrkuma0@engr.uky.edu (R. R. Kumar), tlyang@c-think.com (T.
Yang).
2
thermal wave, the phonon-electron interaction [5,6], and the pure phonon scattering (Guyer and Krumhansl [14]) models as values of model parameters τq
and τT are changed, permitting coverage of a wide range of physical responses,
from microscopic to macroscopic scales, in both space and time, ostensibly
with a single formulation in terms of a single temperature.
Tzou has attempted to compare this one-temperature formulation with the
two-step temperature formulations, but it has been noted that the DPL onetemperature description of heat conduction in solids cannot be used to explain
the microscale two-temperature physics for pulse-laser heating of metals because these two formulations have different physical bases. Zhou et al. [15]
argue that the DPL equation is only a relaxed mathematical representation
with no sound physical interpretation attached to it. In particular, the temperature distribution predicted by the DPL model does not correspond to either
the electron temperature Te or the lattice temperature Tl . Thus, the objective
of the present paper is not to attempt validation of the DPL model but rather
to present a method for treating equations such as this (involving lagging and
mixed derivatives) and provide a procedure to efficiently solve them in the
context of a relatively simple (single-temperature) formulation.
In recent years, various numerical methods have been investigated for solving the DPL equation. Most early numerical studies involved only the 1-D
equation, often using explicit discretization in time. Recent studies have begun to consider 2-D and 3-D DPL equations, with implicit discretizations.
Dai and Nassar [16,17] have developed an implicit finite-difference scheme in
which the DPL equation is split into a system of two equations; the individual equations are discretized using the Crank–Nicolson scheme and solved
sequentially. These authors use the discrete energy method of Lee [18] to show
that the approach is unconditionally stable, and that the numerical solutions
are non-oscillatory. The method has been generalized to 3-D by Dai and Nassar [19–21] and applied to the case of heating a rectangular thin film with
thickness at the sub-micron scale.
Zhang and Zhao [22,23] have employed the iterative techniques Gauss–Seidel,
successive overrelaxation (SOR) with optimal overrelaxation parameters, conjugate gradient (CG), and preconditioned conjugate gradient (PCG) to solve
the 3-D discrete DPL equation with Dirichlet boundary conditions. In contrast, applying Neumann boundary conditions (as often needed for heat transfer problems) can result in non-symmetric seven-band (in 3-D) positive semidefinite matrices that can be unsuitable for treatment with iterative methods
of the nature of CG and PCG, suggesting that other approaches should also
be considered.
The purpose of the present paper is to provide a formulation based on a single
1-D DPL equation (in contrast to the usual two coupled equations) solved
3
via trapezoidal integration. We will demonstrate consistency and first-order
temporal accuracy (despite use of trapezoidal integration) of the numerical
scheme by performing a truncation error analysis, and we employ a simple
von Neumann analysis to show stability. The numerical technique will be extended to three dimensions using a Douglas–Gunn time-splitting method in
δ form, and efficiency of this approach will be assessed via comparisons with
other current solution procedures reported in the recent literature. We then
briefly study application of Richardson extrapolation in time for the 1-D case
to obtain second-order accurate results in both space and time. Comparisons
of 1-D results with both analytical and experimental results, and 3-D simulations, are provided, and we close the paper with a summary, conclusions and
suggestions for further work.
2
Analysis
We first outline a derivation of the DPL equation employing a heat flux formulation containing two phase-lag time scales that lead to finite thermal propagation rates—and at the same time to a delay partial differential equation containing two delays. We simplify this via Taylor expansion of the temperature
with respect to each of these time scales. Following this we provide detailed
analysis of the discretizations being employed, and in particular demonstrate
consistency and stability of the overall formulation in one space dimension.
2.1 Brief review of DPL equation origins
Mathematically, the dual phase-lag concept can be represented as in [11] with
heat flux expressed as
q(x, t + τq ) = −λ∇T (x, t + τT ),
(1)
where τT is the “phase lag” of the temperature gradient, and τq is the corresponding lag of the heat flux vector. Here λ represents thermal conductivity,
and x is a spatial location. There are three characteristic times involved in
the dual phase-lag model: the instant of time t + τT at which the temperature
gradient is established across a material volume, the time t + τq for the onset
of heat flow, and time t for the transient heat transport. The heat flux and
temperature gradient shown in the Eq. (1) represent local responses within the
solid medium and should not necessarily be associated with the global quantities specified in boundary conditions. Application of heat flux at the boundary
does not imply precedence of the heat flux vector to the temperature gradient throughout the material domain; the temperature gradient established
4
at a material point within the solid medium can still precede the heat flux
vector. Whether heat flux precedes the temperature gradient depends on the
combined effects of type of thermal loading, geometry of the specimen, and
thermal properties of the material. For the case of τT > τq , the temperature
gradient established across a material volume is a result of the heat flow, implying that the heat flux vector is the cause (e.g., due to localized internal
heating), and the temperature gradient is the effect. For τT < τq , on the other
hand, heat flow is induced by the temperature gradient established at an earlier time t, implying that the temperature gradient is the cause, while heat
flux is the effect—the view of heat transfer from classical thermodynamics.
Application of the first law of thermodynamics in the usual way, but now with
the time lags described above, leads to
∂T
(x, t + τq ) = α∆T (x, t + τT ) ,
∂t
(2)
which is a delay partial differential equation with two separate delays. Here,
α is thermal diffusivity, and ∆ is the Laplace operator in an appropriate coordinate system. In this form the mathematical problem is nearly intractable,
both analytically and numerically. But if we assume T is sufficiently smooth
in time we can expand it in Taylor series about t, separately, with respect to
each of τq and τT :
T (x, t + τq ) = T (x, t) +
∂T
(x, t)τq + · · · ,
∂t
and
∂T
(x, t)τT + · · · ,
∂t
where we have neglected all higher-order terms. Clearly, if higher-order derivatives remain bounded we should expect this approximation to be at least qualitatively accurate because τT and τq are expected to be small. Substitution of
these expressions into (2) leads to
T (x, t + τT ) = T (x, t) +
τq
∂T
∂(∆T )
∂2T
+
− τT α
= α∆T .
2
∂t
∂t
∂t
(3)
It should be clear that analysis of (3) is far more straightforward than that
of Eq. (2), despite presence of the third-order mixed derivative term, because
there are now no delays. In particular, complete well-posed problems for the
HHCE are also well posed for (3). Furthermore, we see that when τT = 0 the
HHCE is recovered, and if both τT and τq are zero the usual parabolic heat
equation results.
As was hinted above, it has been customary to decompose (3) as a system
of two equations containing no mixed derivative. There are at least a couple
5
versions of this, and we refer the reader to [21] for one example. But such
decompositions rely on constancy of τq and τT , and while this is not an unreasonable expectation it is at least of interest to seek a solution approach not
depending on this requirement. Loss of this required constancy could occur
(spatially) for nonhomogeneous materials, and, in general, if τq and τT depend
on T , leading to nonlinearities. Directly solving Eq. (3), as we will describe in
the sequel, provides a way to to handle these situations although this is not
the focus of the present work.
By introducing dimensionless quantities defined by Chiu in [24],
θ(x, t) =
T (x, t) − T0
,
TW − T0
β=
t
,
τq
x
δ=√ ,
ατq
(4)
we can express Eq. (3) as
∂2T
∂
∂T
+ 2 −Z
∂t
∂t
∂t
∂2T
∂x2
!
=
∂2T
,
∂x2
(5)
where Z is the ratio of τT to τq , and τq is equated to the diffusive time scale.
We remark that it has been necessary to use constant values of these parameters to achieve this scaling, which is convenient for the remainder of the
analyses; but it is not unduly difficult to work with the dimensional form
of equation (3) to permit treatment of nonconstant parameter values as mentioned above. Indeed, this form is employed in our later simulations of physical
problems, results of which will be presented in Sec. 5.
2.2 Discretization and analysis of the 1-D DPL equation
We begin by applying trapezoidal integration to Eq. (5) to obtain
∂T
Tmn+1 − Tmn +
∂t
!n+1
m
∂T
−
∂t
!n
∂2T
−Z
∂x2
m
=
2
k ∂ T
2
∂x2
!n+1
m
!n+1
m
∂2T
−
∂x2
2
+
!n
m
!n
T
∂
∂x2
,
(6)
m
with k denoting the time step size (∆t); subscripts provide discrete spatial
indexing, and superscripts represent time levels. It is of interest to note that
backward-Euler integration results in the same set of terms shown in (6), but
with different signs and coefficients for some terms.
6
We apply a second-order backward difference to discretize the time derivative
at time level n + 1 and a centered difference for the time derivative at n. The
second-order derivatives in space are approximated using a centered-difference
scheme: thus,
∂T
∂t
!n+1
∂T
∂t
∂2T
∂x2
m
!n
m
!n
m
i
1 h n+1
∼
3Tm − 4Tmn + Tmn−1 ,
=
2k
(7a)
i
1 h n+1
∼
Tm − Tmn−1 ,
=
2k
(7b)
1
∼
= 2 [Tm+1 − 2Tm + Tm−1 ] ,
h
(7c)
where we have written these without their associated truncation errors, and
we note that the last of these holds for both time levels included in Eq. (6). In
Eq. (7c) h ≡ (b − a)/(Nx − 1) is the spatial step size for a 1-D spatial domain
Ω ≡ [a, b] discretized with Nx uniformly-spaced grid points.
The approximations shown in Eqs. (7) render the numerical scheme globally
first-order accurate in time and second-order accurate in space, as we now
show.
Proposition 1 Suppose for all x ∈ Ω ⊂ R and t ∈ (t0 , tf ] that T (x, t) is
sufficiently smooth to possess bounded mixed derivatives through at least order
six. Then the combination of trapezoidal integration and discretizations (7)
applied to Eq. (5) yields a consistent approximation that is first order in time
and second order in space for all 0 ≤ Z < ∞.
Proof. After substituting Eqs. (7) into Eq. (6) we obtain
Tmn+1
−
Tmn
i
i
1 h n+1
1 h n+1
+
3Tm − 4Tmn + Tmn−1 −
Tm − Tmn−1
2k
2k
i h
i
Z h n+1
n+1
n
n
− 2 Tm+1 − 2Tmn+1 + Tm−1
− Tm+1
− 2Tmn + Tm−1
h
i h
i
k h n+1
n+1
n
n
− 2Tmn+1 + Tm−1
+ Tm+1
− 2Tmn + Tm−1
,
= 2 Tm+1
2h
(8)
and simplification and rearrangement leads to
n+1
n+1
n
n
Tm−1
+ C1 Tmn+1 + Tm+1
= C2 Tm−1
+ Tm+1
+ C3 Tmn − C4 Tmn−1
7
(9)
for m = 1, 2, . . . , Nx (modulo boundary condition treatment); and
h2 (1 + 1/k) + 2Z + k
,
Z + k/2
Z − k/2
,
C2 =
Z + k/2
h2 (1 + 2/k) + 2Z − k
C3 = −
,
Z + k/2
h2 /k
C4 =
.
Z + k/2
(10a)
C1 = −
(10b)
(10c)
(10d)
n+1
Expansion of Tm−1
(= T (xm−1 , tn+1 )), etc., in (9) about an arbitrary spacetime point (xm , tn ) ∈ Ω × (t0 , tf ], and using Eqs. (10) followed by straightforward but tedious algebra, results in
∂2T
∂3T
∂2T
k ∂3T
∂2T
∂4T
∂T
+ 2 −Z
−
=
−
+
Z
+
∂t
∂t
∂t∂x2
∂x2
2 ∂t∂x2
∂t2
∂t2 ∂x2
!
h2 ∂ 4 T
∂5T
k2 1 ∂ 3 T
+Z
−
+
12 ∂x4
∂t∂x4
2 3 ∂t3
!
1 ∂4T
1 ∂4T
Z ∂5T
+
(11)
−
−
6 ∂t4
2 ∂t2 ∂x2
3 ∂t3 ∂x2
!
h2 k ∂ 5 T
∂6T
+Z 2 4 +
24 ∂t∂x4
∂t ∂x
!
5
3
∂ T
1 ∂4T
Z ∂6T
k
+···
−
+
12 ∂t3 ∂x2 2 ∂t4
2 ∂t4 ∂x2
!
at (xm , tn ), where we have suppressed index notation since this holds at all
points other than those corresponding to Dirichlet boundaries. Clearly, the
right-hand side approaches zero as h, k → 0 independent of the order of these
limits, and the leading error is O(k + h2 ) independent of Z. This completes
the proof.
Notice that Eqs. (8) and (9) are three-level in time. Moreover, the right-hand
side of Eq. (9) consists of known values, and the implicit part on the left-hand
side is tridiagonal, so the collection of all such equations at each time level
can be easily solved using familiar tridiagonal LU decomposition, or possibly
cyclic reduction.
8
2.3 Stability analysis
We analyze the stability of the above scheme via a von Neumann analysis.
Because Eq. (9) is a three-level difference approximation, the von Neumann
condition supplies only a necessary (but not sufficient) stability criterion in
general. Thus, we also present some numerical results that at least suggest
that the method is unconditionally stable.
Proposition 2 The discretization of the DPL equation given by Eq. (9) satisfies a von Neumann necessary condition for stability ∀ h, k ≥ 0, and ∀ 0 ≤
Z < ∞.
Proof. Since the DPL equation in the form treated here is linear and constant
coefficient, it is clear that the discrete evolution equation for the error {enm } is
n+1
n
n
n
n−1
en+1
+ en+1
m−1 + C1 en
m+1 = C2 (em−1 + em+1 ) + C3 em − C4 em ,
(12)
with the Ci s given in (10). As usual, let
enm = ξ n eiβmh
(13)
with β arbitrary. Then substitution of (13) into (12) results in
ξ2 −
C4
C3 + 2C2 cos βh
ξ−
= 0,
C1 + 2 cos βh
C1 + 2 cos βh
(14)
which we express as
ξ 2 − C1∗ ξ + C2∗ = 0
(15)
s
(16)
for ease of presentation. Then
C∗
ξ± = 1 ±
2
C1∗ 2
− C2∗ ,
4
and we must show that |ξ± | ≤ 1, independent of h, k and Z, to complete the
proof.
We will do this indirectly by appealing to a lemma that appears in Young
[25] (pg. 171). This states that the magnitude of both roots of a quadratic
polynomial of the form (15) is less than unity ∀ C1∗ , C2∗ ∈ R satisfying
|C2∗ | < 1 ,
and |C1∗ | < 1 + C2∗ .
(17)
Hence, all that is needed is to demonstrate satisfaction of these inequalities.
We remark that the lemma is used in [25] in the context of studying convergence of linear iterative methods for solving sparse algebraic systems. Thus,
9
strict inequalities are required in (17) to guarantee spectral radii strictly less
than unity. In the present case of stability analysis, non-strict inequalities are
permissible.
Substitution of Eqs. (10a) and (10d) into the definition of C2∗ (Eq. (14)) results
in
h2 /k
C2∗ = − 2
.
h (1 + 1/k) + (2Z + k)(1 − cos βh)
Clearly, C2∗ ≤ 0; but the denominator is nonnegative, and we need only check
that
h2
≤ h2 (1 + 1/k) + (2Z + k)(1 − cos βh) ,
k
or
k
k + 2 (2Z + k)(1 − cos βh) ≥ 0 .
h
But this holds trivially ∀ h, k, Z ≥ 0.
Next, we construct C1∗ in a similar manner to obtain
C1∗
h2 (1 + 2/k) + (2Z − k)(1 − cos βh)
= 2
.
h (1 + 1/k) + (2Z + k)(1 − cos βh)
The denominator of this expression is the same as that in C2∗ and is nonnegative; but this does not necessarily hold for the numerator if Z ≤ k/2 and h is
sufficiently small. Thus, we must consider |C1∗ | ≤ 1 + C2∗ written in the form
|h2 (1+2/k)+(2Z −k)(1−cos βh)| ≤ h2 (1+1/k)+(2Z +k)(1−cos βh)+h2 /k .
Rearrangement of the right-hand side of this inequality leads to
|h2 (1 + 2/k) + (2Z − k)(1 − cos βh)| ≤ h2 (1 + 2/k) + (2Z + k)(1 − cos βh) ,
which clearly holds ∀ h, k, Z ≥ 0 since the right-hand side is nonnegative.
Hence, both inequalities in (17) are satisfied (nonstrictly), thus guaranteeing
that |ξ± | ≤ 1 holds independent of the combination of space and time step
sizes and the chosen value of Z, and proof of the proposition is complete.
But as already noted, this alone does not imply unconditional stability because the difference equation (9) is three level. We have performed numerous
computations with a wide range of values of h, k and Z and have been unable
to find any combinations that lead to long-time blowup of solutions. Thus,
unconditional stability appears to be likely, but it cannot be proven with the
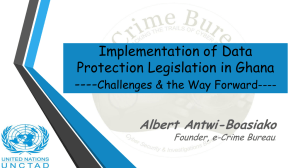
simple von Neumann analysis provided here. Figure 1 displays time series at
the midpoint of the spatial domain [0, 2] for several cases of step sizes and values of Z including both rather nominal and somewhat extreme sets of these
parameters. Part (a) of the figure corresponds to the case Z = 0, which at
early times exhibits oscillations due to incompatibility of initial and boundary
10
1.2
(a)
1.0
0.8
1.1
k/h2 = 0.5
1.0
0.6
k/h2 = 10 4
0.9
2
k/h = 5
0.8
0.4
0.7
0.6
0.2
0.5
0
2
4
6
8
10
0.0
(b)
Scaled Temperature
1.0
0.8
1.1
k/h2 = 0.5
1.0
0.6
0.9
k/h2 = 10 4
0.8
0.4
0.7
k/h2 = 5
0.6
0.2
0.5
0
2
4
6
8
10
0.0
(c)
1.0
0.8
1.1
k/h2 = 0.5
1.0
0.6
0.9
k/h2 = 10 4
0.8
0.4
0.7
k/h2 = 5
0.6
0.2
0.5
0
2
4
6
8
10
0.0
0
10
20
30
40
50
60
Scaled Time
Fig. 1. Numerical confirmation of stability; (a) Z = 0, (b) Z = 1, (c) Z = 10.
conditions and the hyperbolicity of Eq. (5). In particular, T is initially identically zero (as is ∂T /∂t), but a non-zero boundary temperature is imposed
on the left boundary. Part (b) presents results for Z = 1, and part (c) for
11
Z = 10. In each of these results are presented for combinations of k and h
such that k/h2 = 21 , 5 and 104 . Except for the first, these could lead to instability for typical explicit schemes for some values of Z. The figure shows that
the long time behavior corresponds to a steady, bounded solution independent
of combination of space and time step, and the insets provide an indication of
convergence as time step k is decreased, except in the pure hyperbolic case.
Furthermore, many other runs were computed, some with k/h2 as high as 106 ;
but all show the same qualitative behavior, so we are reasonably confident
that the method is unconditionally stable.
3
Efficient Solution of 3-D DPL Equation
In this section we extend the approach analyzed above to the physicallyrelevant 3-D case. Recent work in both 2D and 3D has often employed iterative
methods to solve the algebraic systems arising at each discrete time step; this
can be quite inefficient, especially when very fine spatial grids are being used.
Here, we will utilize a very old approach that has been widely employed in
computational fluid dynamics to efficiently treat the 3-D problem, but we note
that this technique is basically not applicable when unstructured meshes are
used.
We begin with presentation of the dimensional, non-homgeneous 3-D DPL
equation, apply discretizations analogous to those used earlier in 1D, and
then derive the Douglas–Gunn [26] time-split formulas that result in only
O(N ) arithmetic operations per time step, where N is the number of points in
the computational grid. By comparison, even fairly efficient iterative methods
often require as much as O(N 1.5 ) operations per time step as is suggested by
CPU-time comparisons with an often-used such method presented in a final
subsection of the current section.
3.1 Discretization of a 3-D nonhomogeneous DPL equation
The governing DPL equation used to describe the thermal response of microstructures subjected to laser heating is expressed in dimensional form in
[10] as
∂S
τq ∂ 2 T
1 ∂T
∂(∆T )
1
S + τq
+
− τT
= ∆T +
2
α ∂t
α ∂t
∂t
λ
∂t
12
!
.
(18)
In one dimension the volumetric source term S describing laser heating of the
electron-phonon system from a thermalization state is given by
"
#
x 1.992 | t − 2tp |
1−R
exp − −
S(x, t) = 0.94J
tp δ
δ
tp
!
,
(19)
where laser fluence J = 13.7J/m2 , and tp = 96fs; penetration depth is δ =
15.3 nm, and reflectivity is R = 0.93, as presented in [24]. We have extended
this to 3D as
(x− L2x )2 +(y− L2y )2 z 1.992 |t−2tp |
1−R
S(r, t) = 0.94J
− −
exp −
, (20)
tp δ
2ro2
δ
tp
"
#
!
where Lx and Ly are the length and width of the metal film respectively, and
ro is radius of the laser beam oriented in the z direction.
Applying trapezoidal integration to Eq. (18) between time levels n and n + 1
yields
∂T
T n+1 − T n + τq
∂t
=α
!n+1
∂T
−
∂t
!n
−τ
α ∆T n+1 − ∆T n
T
α k n+1
α k
∆T n+1 + ∆T n +
S
+ S n + τq S n+1 − S n
2
λ2
λ
(21)
at any grid point (xi , yj , zk ). As in the earlier 1-D case, we apply a second-order
backward difference for the time derivative at time level n + 1 and a centered
difference at time level n. Second-order derivatives in space are approximated
using the usual centered-difference scheme.
We first consider contributions from the left-hand side of (21) plus the timelevel n + 1 Laplacian from the right-hand side that results from these approximations. These terms can be expressed as
"
τ + k/2 1 1
n+1
Ti,j,k
−α T
T
−
2T
+
T
+
Ti,j−1,k
i−1,j,k
i,j,k
i+1,j,k
1 + τq /k h2x
h2y
#n+1
1
− 2Ti,j,k + Ti,j+1,k + 2 Ti,j,k−1 − 2Ti,j,k + Ti,j,k+1
hz
τq /k
2τq /k n
Ti,j,k +
T n−1 .
−
1 + τq /k
1 + τq /k i,j,k
(22)
Similarly, the remaining terms from the right-hand side differential operators
of (21), and including the time-level n term from the mixed derivative on the
left-hand side, are
13
"
τ − k/2 1 1
α T
T
−
2T
+
T
+
T
−
2T
+
T
i−1,j,k
i,j,k
i+1,j,k
i,j−1,k
i,j,k
i,j+1,k
1 + τq /k h2x
h2y
#n
1 + 2 Ti,j,k−1 − 2Ti,j,k + Ti,j,k+1
hz
.
(23)
Finally, the nonhomogeneous term can be written as
sn =
i
α/λ h
τq + k/2 S n+1 − τq − k/2 S n .
1 + τq /k
(24)
If we now combine the results from expressions (22)–(24) and move all terms
to the left-hand side except the nonhomogeneous term, we can express the
result in the standard form of a M +2-level difference equation to which the
Douglas–Gunn formalism [26] can be directly applied:
I +A
n+1
T
n+1
+
M
X
B nm T n−m = sn ,
(25)
m=0
with M = 1 in the case of the three-level scheme being considered here.
Bold symbols denote N × N matrices with N ≡ Nx Ny Nz , the product of
the number of grid points in each coordinate direction, and I is the identity
matrix. This equation holds at all points of the discrete solution domain except
at boundaries, where some modifications are necessary. We also remark that
in the cases being treated herein the temporal indexing of matrices is merely
formal.
The matrix An+1 consists of the terms in (22) arising from spatial discretization at time level n + 1; viz,
A
n+1
=
Ns
X
An+1
,
`
(26)
`=1
where Ns is in general the number of split steps (which in the present case
is the number of spatial dimensions of the solution domain). Also, the B
matrices are constructed as follows:
B n0 = An −
2τq /k
I,
1 + τq /k
B n1 =
τq /k
I.
1 + τq /k
(27)
In the first of these the matrix An arises from spatial discretization of the
Laplacian at time level n appearing in (23).
14
3.2 Douglas–Gunn time splitting
Formal time splitting of this equation is based on the following `th split step
formula from [26]:
(I + An+1
)T (`) +
`
`−1
X
An+1
T (r) +
r
r=1
Ns
X
1
X
An+1
T∗ +
r
B nm T n−m = sn ,
(28)
m=0
r=`+1
` = 1, . . . , Ns ,
and
T n+1 ≡ T (Ns ) .
(29)
It is clear from the form of (28) that all terms are evaluated explicitly except
the first. Indeed, all those in the second term (first summation) have already
been computed during earlier split steps while those in the second summation
are usually evaluated with data from the preceding time level, or via extrapolation if higher accuracy is sought. In our case, the latter will not be necessary
since the basic unsplit scheme is only first-order accurate in time. Finally, all
information needed for the third summation comes from earlier time levels.
Thus, we can express (28) as
(I + A` )T
(`)
n
=s −
`−1
X
Ar T
r=1
(r)
−
Ns
X
r=`+1
∗
Ar T −
1
X
B m T n−m ,
(30)
m=0
with all quantities on the right-hand side known, and where we have now
suppressed time-step indexing of matrices.
Although the first summation in (30) is null for ` = 1 and the second for
` = Ns , there is nevertheless considerable arithmetic required for evaluation
of these equations for all ` = 1, . . . , Ns . But by first writing the above for
the ` − 1th step and subtracting this from the `th -step formula for all but
the first step, and then adding and subtracting (I + A` )T (`) for each of the
resulting Ns equations (including the first), one obtains the so-called δ form
of Douglas–Gunn time splitting:
(I + A1 )δT
(1)
n
n
= s − (I + A)T −
(I + A` )δT (`) = δT (`−1) ,
1
X
B m T n−m ,
m=0
` = 2, . . . Ns .
where δT (`) ≡ T (`) − T n ⇒ T n+1 = T n + δT (Ns ) .
In this form we recognize that the right-hand side of the first equation is the
original discrete equation evaluated at time level n, so the amount of required
arithmetic is O(N )—essentially that required for an explicit method. Then
there are Ns matrix-vector solves to be performed. In the present case, each of
15
these involves a tridiagonal matrix, which also leads to O(N ) arithmetic per
solve. For the `th split step this takes the form
(`)
(`)
(`)
(`)
(`)
(`)
(`−1)
C1 δTi−1 + C2 δTi + C1 δTi+1 = δTi
with the coefficients defined as
(`)
C1 ≡ −
τT + k/2
,
+ τq /k
(`)
C2 ≡ 1 +
h2` (1
2(τT + k/2)
,
h2` (1 + τq /k
and i denotes a generic multi index for (3-D) gridpoint notation with shifts
only in the `th slot. Furthermore, we associate hx with ` = 1, i.e., h1 = hx ,
etc.
It is worthwhile at this point to recall some of the features of Douglas–Gunn
time splitting presented in [26]. First, it is proven in that work that up through
second-order temporal accuracy, the split scheme retains the accuracy of the
unsplit scheme. Second, it is also shown that stability of the unsplit scheme
is inherited by the split scheme. While we have not carried out a detailed
stability analysis in the 3D case, the equation is of the same form as that
studied in 1D where unconditional stability is suggested, and our numerical
results in 3D have provided no counterexamples. Moreover, it is generally true
that split schemes are more stable than unsplit ones (even for explicit multidimensional methods) for a rather basic reason. Namely, the amplification
factor of a split method is usually, up to a small perturbation, the product
of the amplification factors of the individual split steps. So, if each of these
is stable, then the overall split scheme is even more strongly stable. Indeed,
one sees from this that it is even possible for one (or more) steps of a split
scheme to be unstable while the method, as a whole, retains stability. Finally,
we remark that these favorable properties of the Douglas–Gunn split scheme
are proven in [26] under quite stringent conditions associated with solution
regularity and commutativity of the various matrices appearing in Eqs. (26)
and (27). But it is usually found in practice that these requirements can be
relaxed significantly without affecting behavior of the method.
3.3 CPU time comparisons with other solution methods
As we have already emphasized, Douglas–Gunn time splittings exhibit very
favorable stability and accuracy characteristics; but beyond this is their inherent computational efficiency. We quantify this with data presented in Table 1
which contains a sampling of results given by Kunadian et al. [27]. This table shows CPU time in seconds required to complete an entire simulation
to a fixed final time for explicit, conjugate gradient and δ-form Douglas–
Gunn time-splitting methods using different values of number of grid points
16
N = Nx Ny Nz . The spatial domain consists of a thin square slab described
in more detail in Sec. 5 with uniform grid spacing, and equal number of grid
points, in each of the three separate directions.
Table 1. Performance comparison of different numerical methods for solving the
discretized 3-D DPL equation.
Numerical techniques
Total required CPU time (seconds)
N = 213
Explicit Scheme
Conjugate Gradient
δ-form Douglas–Gunn
N = 413
N = 513
N = 1013
4.88
147.62
450.26
7920.00
12.33
124.83
270.30
3614.69
8.54
70.50
140.92
1344.40
From the table we can observe that for extremely coarse grids the explicit
method consumes less CPU time than that required by the other numerical
techniques, but as the spatial resolution is refined the implicit methods perform better than the simple forward-Euler/centered-difference explicit method
employed in this research due to the small time steps required for stability of
the latter. The δ-form Douglas–Gunn time-splitting used in the present study
consumes the least CPU time of the three methods considered; moreover, its
degree of superiority increases with spatial resolution, and it is highly parallelizable. Further comparisons of this sort over a wide range of currently-used
methods are forthcoming in a paper by Kumar et al. [28] where it is shown
that for high-resolution calculations on grids having greater than a million
grid points, time splitting is significantly more efficient for time-dependent
problems than any iterative technique.
4
Application of Richardson Extrapolation in Time
In an earlier subsection we showed that our basic method is only first-order
accurate in time. A straightforward remedy is Richardson extrapolation, as
described in essentially any elementary numerical analysis text, e.g., Isaacson
and Keller [29]. Here we present the formula to be used to implement this
technique and provide some 1-D results to demonstrate its effectiveness. Because we are extrapolating only in time, the algorithm needed for spatially
multi-dimensional problems is the same.
It is well known that Richardson extrapolation makes use of two (or more)
solutions to the same set of discrete equations calculated with different discrete
step sizes, and combined in such a way as to cancel truncation error at lowest
order. In the case of first-order methods and discretization step sizes differing
by a factor of two, the formula used is identical to simple linear extrapolation,
17
namely
T ∗ = 2T (k/2) − T (k) ,
(31)
where T ∗ is the extrapolated result having accuracy corresponding to the next
higher order in the truncation error expansion; T (k) is the result computed
with time step size k, and T (k/2) is computed with a time step size k/2. Of
course, different combinations of time step sizes can be used, leading to somewhat different formulas. Clearly, the process can be repeated to successively
remove higher-order errors, but here we will apply it only once using Eq. (31).
It is also important to note that temporal extrapolation of approximate solutions to differential equations must be done globally to avoid destabilization
of the underlying time integration technique.
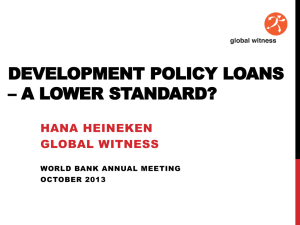
Figure 2 presents results demonstrating the effects on grid-function convergence of applying Eq. (31). Part (a) of this figure shows time series of temperature computed with Z = 1.5 in the 1-D DPL equation (5) at the center
point of the spatial interval [0, 2] with fixed spatial step size h = 0.01 and the
sequence of time step sizes k = 0.04, 0.02, 0.01 along with a result of higher
accuracy obtained by Richardson extrapolation of the k = 0.01 solution. The
first-order convergence rate is obvious: the error is decreased by a factor of
two each time the time step size is reduced by the same factor. In part (b) of
the figure we show results for the same grid spacing and time step sizes, but
now with Richardson extrapolation. (Of course, to accomplish extrapolation
for the smallest time step it was necessary to also compute with a k = 0.005
step.) It is clear that the three extrapolated time series lie very close to one
another, and in fact are all more accurate than the unextrapolated k = 0.01
result.
Several remarks are needed for a better understanding of these extrapolated
results. First, the (rather short) interval chosen for displaying results is an
“optimal” one (for visualizing the extrapolation effects) with respect to the
overall time series computed for t ∈ (0, 10]. That is, the various curves are
farthest apart on this subinterval, thus permitting easy qualitative assessment
of convergence rate. Otherwise, there is nothing special regarding this interval.
Second, the value Z = 1.5, while not the only one providing an easily visualized depiction of results, is a reasonable and practical one; moreover, curves
computed with the various time step sizes shown here are significantly closer
together (and thus harder to interpret graphically) when either very large (say
Z > 10) or very small (Z < 0.1) values are used. Convergence rates are not
changed in these cases, but they are more difficult to present clearly in plots
such as contained in Fig. 2.
Third, the results of this figure were computed with the spatial step size
held fixed. In general, one must decrease both h and k to obtain a converged
solution. But the basic method is already second-order accurate in space, and
18
(a)
0.26
k = 0.01, extrapolated
0.22
Scaled Temperature
k = 0.01
k = 0.02
0.18
k = 0.04
0.14
(b)
0.26
k = 0.01, extrapolated
0.22
0.18
k = 0.02, extrapolated
k = 0.04, extrapolated
0.14
0.16
0.20
0.24
0.28
Scaled Time
Fig. 2. Richardson extrapolation of 1-D DPL equation results; (a) demonstation of
first-order convergence of basic method, (b) results obtained with extrapolation.
it is easy to see that the form of extrapolation used in time does not alter
this formal order of accuracy. In particular, consider construction of a formula
such as (31), but now with spatial discretization also taken into account. From
the form of Eq. (11) it is clear that
Tmn (k, h) = T (xm , tn ) + τ1 k + σT1 h2 + O(k 2 , . . .) ,
with τ1 and σ1 representing evaluations of appropriate derivatives as found in
(11). Then if the space and time steps are both halved simultaneously,
Tmn (k/2, h/2) = T (xm , tn ) + τ1
h2
k
+ σ1 + O(k 2 , . . .) .
2
4
To eliminate the O(k) temporal error we multiply the second of these by two
and subtract the first:
1
T ∗ = 2Tmn (k/2, h/2) − Tmn (k, h) − σ1 h2 + O(k 2 , h2 k + k 3 , . . .) ,
2
19
(32)
which is of the form (31) but now displays the new (after extrapolation) dominant global truncation errors. It is worth noting that if h is not changed during
extrapolation, the dominant spatial truncation error will be twice as large, and
of opposite sign, as that in Eq. (32); but it will still be of the same order. On
the other hand, the O(h2 k) term(s) will be completely eliminated for fixed h
but only made smaller if h is reduced by a factor two at the same time this is
done with k. The net effect of changing both h and k yields results that are
qualitatively indistinguishable from those of the figure for the cases we have
tested.
We next comment that the formal order of accuracy of extrapolated results
indicated by (32) was not observed uniformly in time or space in the computed results. There are two main contributions to this discrepancy. First, the
truncation error expansions are sufficiently complicated, as is clear from (11),
to admit local (at least partial) error cancellations. When (and where) this
occurs, although the formal order of accuracy may (or may not) be altered,
the truncation error expansions will assume somewhat different forms than
that of (32). Furthermore, if a contribution goes through zero, resulting in a
sign change, extrapolation in a neighborhood of such an occurence is often
ineffective. On the other hand, one expects that for sufficiently small h and k
such sign changes should not occur.
But with small h and k a second effect can be experienced. In the present
calculations, despite the fact that the values employed for h and k appear
to be relatively large, computed results are quite accurate. One sees in Fig.
2(a) that even the k = 0.04 solution contains errors of only ∼ 5%, and as
already indicated, the errors shown in this subinterval are among the largest
of the whole calculation. Furthermore, it is clear from Fig. 2(b) that errors
in the extrapolated solutions are nearly insignificant for all values of k. The
consequence of this is that when comparing extrapolated solutions in an effort
to quantitatively deduce observed order of temporal accuracy, it was often
the case that the main differences between solutions computed with different
values of time step arose from rounding errors. This was confirmed for some,
but not all, cases by repeating runs utilizing quadruple-precision arithmetic.
In general, as close examination of Fig. 2(b) suggests, the Richardson extrapolated results exhibited temporal convergence rates between first and second
order (rather than the theoretical second order), depending on the specific
space-time point selected for analysis. But as is also evident from comparing
the two parts of Fig. 2, the extrapolated results are far more accurate in an
absolute sense than are the basic first-order results.
Finally, it is important to note that even though global solutions must be used
in the Richardson extrapolation process to maintain stability of the underlying
time-stepping procedure, this does not imply that two copies of the complete
(for all spatial points and for all time) solution to the PDE must be first
20
generated (and stored) before extrapolation can be accomplished. In fact,
with only a couple extra arrays of size N the Richardson procedure can be
implemented to perform extrapolation after each new time step and to write
the results to files, as desired (as would be done without extrapolation). The
key to maintaining stability is simply to not evolve the extrapolated results.
The additional code needed to implement such a procedure is only a few lines.
5
Computed Results for Specific Problems
In this section we provide some representative results associated with simulating physical problems of the sort for which the DPL equation was originally
intended. In the first subsection calculations corresponding to a 1-D model of
laser heating of a thin gold film are presented and compared with analogous
analytical and experimental results, and in a second subsection simulations
from a 3-D model problem are presented.
5.1 1-D laser heating of gold film
The equation solved in this case is Eq. (18) with the Laplacian replaced by
∂ 2 /∂x2 and the right-hand side forcing constructed from Eq. (19). The initial
conditions are T ≡ 0, and ∂T /∂t ≡ 0 on Ω; no-flux boundary conditions are
employed at both ends of the interval. We note that differentiation of S as
required in (18) poses a mild difficulty due to the form of (19), but this does not
create a major problem since the Heaviside function is in L1 (Ω) for bounded
Ω. In this problem the spatial domain Ω is the film thickness (0.1 µm). The
problem is discretized with Nx = 1001 points, and a time step k = 1.25×10−14
seconds (= ∆t) was used. Our earlier grid-function convergence tests, although
conducted with a dimensionless form of the DPL equation, suggest that this
should provide sufficient resolution.
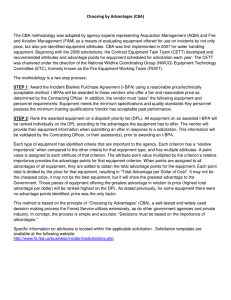
Figure 3 presents a comparison between the numerical, analytical [24] and
experimental results of Brorson et al. [30] and Qiu and Tien [5,6] corresponding
to the front surface transient response for a 0.1µm thick gold film. Thermal
properties of the material (α = 1.2 × 10−4 m2 s−1 , λ = 315 W m−1 K −1 , τT =
90 ps, τq = 8.5 ps) are assumed to be constant. The temperature change has
been normalized by the maximum value that occurs during the short-time
transient.
Results from the present numerical scheme compare nearly perfectly with analytical results (confirming adequacy of the discretization step sizes) and reasonably well with experimental results, while the HHCE and parabolic mod21
1.0
Analytical, Chiu
Experimental, Qui & Tien
Normalized Temperature Change
Experimental, Brorson et al.
0.8
Numerical, Parabolic
0.6
Numerical, HHCE
0.4
0.2
Numerical, DPL
0.0
0.0
0.5
1.0
1.5
2.0
2.5
Time (ps)
Fig. 3. Front surface transient response for a 0.1 µm gold film. Comparison among
numerical, analytical and experimental results.
els, which neglect the microstructural interaction effects during the short-time
transient, overestimate temperature during most of the transient response, as
shown in the figure.
5.2 3-D pulsed-laser heating of gold film
For this problem the full 3-D form of Eq. (18) is employed with a source term
constructed from S given in Eq. (20); initial and boundary conditions are the
same as in the 1-D case but with the former imposed on the whole volume
Ω of the problem domain and the latter now applied over the entire surface
∂Ω. This domain is again a gold film of thickness 0.1µm but now with lateral
extent 0.5µm × 0.5µm. The spatial discretization was constructed on a grid
of 101 × 101 × 21 uniformly-spaced points in all three directions and utilizing
times steps of 1 × 10−14 seconds. As noted in Sec. 2, Eq. (18) acquires DPL,
HHCE and parabolic character according to the values selected for τT and τq .
Here, we have used τT = 90 ps, τq = 8.5 ps ⇒ DPL model; τT = τq = 0 ⇒
parabolic model and τq = 8.5 ps, τT = 0 ⇒ hyperbolic model. Thus, we are
able to employ the same code for all calculations.
22
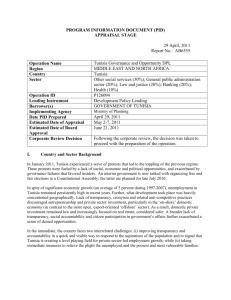
Figures 4 display a comparison (at two different times) of transient temperature distribution caused by a pulsating laser beam of 200 nm diameter heating
the top surface of the gold film at various locations near its corners (with movement from one corner to the next successive one in a counter-clockwise direction) every 0.3 ps, as predicted by DPL, hyperbolic and parabolic heat conduction models. (Bright red represents the highest temperatures, and deep blue
corresponds to the lowest ones.) The figures show that HHCE and parabolic
diffusion models predict a higher temperature over a wider area near the film’s
surface in the heat-affected zone than does the DPL model, but the penetration depth is much shallower. The heat-affected zone is significantly deeper
for the DPL model than for the other models due to the microstructural interaction effect incorporated in the formulation of this model. Furthermore,
discrepancies between DPL and the other two models grow significantly with
time, as is evident from part (b) of the figure. We have been unable to acquire 3-D experimental data with which to make quantitative comparisons
with these simulations.
(a)
(b)
DPL
HHCE
Parabolic
Fig. 4. Temperature distribution in gold film predicted by DPL, hyperbolic and
parabolic heat conduction models; (a) at 0.31 ps, (b) at 2.18 ps.
23
6
Summary and Conclusions
We began by deriving the DPL equation by simple Taylor expansion applied to
a much more (mathematically-) complicated delay PDE. We then developed
a strongly stable implicit finite-difference scheme of Crank–Nicolson type for
solving the one-dimensional DPL equation, without appealing to the standard
decomposition typically employed, and analyzed its accuracy and stability via
standard Taylor expansion and von Neumann stability analysis, respectively.
The method was shown to be only first-order accurate in time (despite its
trapezoidal integration origins) but second order in space; it appears (based
on numerical experiments) to be unconditionally stable, but as we earlier noted
this cannot be guaranteed by only a von Neumann analysis.
The formulation was extended to three-dimensional geometry where the discretized 3-D DPL equation was solved using a δ-form Douglas–Gunn timesplitting method. This approach was shown to outperform both explicit time
stepping and a conjugate gradient iterative procedure in terms of computation
time required to complete a simulation. We then demonstrated application
of Richardson extrapolation to attain formal second-order accuracy in both
space and time. Finally, we presented computed results for realistic physical
problems to highlight DPL equation capabilities.
The treatment we have employed to arrive at the DPL equation is quite simple and may have applicability more generally for other delay PDEs; but as
we noted earlier, use of Taylor expansions imposes rather severe regularity
requirements and at the same time restricts this approach to relatively short
delays. The un-decomposed solution formalism employed here has the advantage of direct application to variable-coefficient PDEs. Its only disadvantage is
the need to numerically treat a third-order mixed (space and time) derivative
and a second-order time derivative. The temporal part of the first of these
is only first order, so it can be directly integrated as we have done. But this
introduces a problem in treating the second-order time derivative term, resulting in a three-level method that is only first order in time. We showed,
however, that this is easily improved to formal second order via Richardson
extrapolation.
Use of Douglas–Gunn time splitting in the solution of the multi-dimensional
DPL equation appears to be nearly optimal, especially as problem size (number of spatial grid points and/or required number of time steps) becomes large.
This, of course, is not a new result; but it seems to have been widely ignored
in recent years, probably in part due to the extreme difficulty in implementing
time-splitting procedures in the context of unstructured meshes, and possibly
also because of concerns associated with “splitting” or factorization errors.
24
Finally, we should emphasize that in the context of applications of the sort
considered here (laser heating of materials), the DPL equation is probably
not the best choice of physical model. In particular, the good agreement with
experimental results displayed in Fig. 3 is widely recognized to require choices
of parameter values that are themselves not physically realistic. Thus, we
prefer to view the DPL equation as a simple example from a class of more
general models of similar mathematical structure that might also be treated
via the techniques presented herein. Application of the algorithm studied here
to similar equations representing more realistic physical situations would be a
fruitful direction for future efforts, and treatment of variable-coefficient forms
of Eq. (3) would also be interesting and useful.
References
[1] V. A. Cimmelli, Boundary conditions for diffusive hyperbolic systems in non
equilibrium thermodynamics, Technische Mechanik, Band 22, Heft 3, 181
(2002).
[2] A. V. Luikov, Application of irreversible thermodynamics methods to
investigation of heat and mass transfer, International Journal of Heat and Mass
Transfer 9, 139 (1966).
[3] K. J. Baumeister and T. D. Hamil, Hyperbolic heat conduction equation: a
solution for the semi-infinite body problem, ASME Journal of Heat Transfer
91, 543 (1969).
[4] Y. Taitel, On the parabolic, hyperbolic and discrete formulation of the heat
conduction equation, International Journal of Heat and Mass Transfer 15, 369
(1972).
[5] T. Q. Qiu and C. L. Tien, Short-pulse laser heating of metals, International
Journal of Heat and Mass Transfer 35, 719 (1992).
[6] T. Q. Qiu and C. L. Tien, Heat transfer mechanisms during short-pulse laser
heating of metals, ASME Journal of Heat Transfer 115, 835 (1993).
[7] T. Q. Qiu, T. Juhasz, C. Suarez, W. E. Bron and C. L. Tien, Femtosecond
laser heating of multi-layered metals—II. Experiments, International Journal
of Heat and Mass Transfer 37, 2799 (1994).
[8] M. I. Kagnov, I. M. Lifshitz and M. V. Tanatarov, Relaxation between electrons
and crystalline lattices, Soviet Physics JETP 4, 173 (1957).
[9] S. I. Anisimov, B. L. Kapeliovich and T. L. Perel’man, Electron emission from
metal surfaces exposed to ultrashort laser pulses, Soviet Physics JETP 39, 375
(1974).
[10] D. Y. Tzou, Macro-to-Microscale Heat Transfer: The Lagging Behavior, Taylor
and Francis, Washington, DC (1996).
25
[11] D. Y. Tzou, A unified approach for heat conduction from macro-to micro scales,
ASME Journal of Heat Transfer 117, 8 (1995).
[12] D. Y. Tzou, The generalized lagging response in small-scale and high-rate
heating, International Journal of Heat and Mass Transfer 38, 3231 (1995).
[13] D. Y. Tzou, Experimental support for lagging behavior in heat propagation, J.
Thermophysics and Heat Transfer 9, 686 (1995).
[14] R. A. Guyer and J. A. Krumhansl, Solution of the linearized Boltzmann
equation, Physical Review 148, 766 (1966).
[15] X. Zhou, K. K. Tamma and C. V. D. R. Anderson, On a new C- and F-processes
heat conduction constitutive model and the associated generalized theory of
dynamic thermoelasticity, Journal of Thermal Stresses 24, 531 (2001).
[16] W. Dai and R. Nassar, A finite difference method for solving the heat transport
equation at the microscale, Numerical Methods Partial Differential Equations
15, 698 (1999).
[17] W. Dai and R. Nassar, A compact finite difference scheme for solving
a one-dimensional heat transport equation at the micro-scale, Journal of
Computational and Applied Mathematics 132, 431 (2001).
[18] M. Lee, Alternating direction and semi-explicit difference scheme for parabolic
partial differential equations, Numerische Mathematik 3, 398 (1961).
[19] W. Dai and R. Nassar, A finite difference scheme for solving a three dimensional
heat transport equation in a thin film with micro-scale thickness, International
Journal for Numerical Methods in Engineering 50, 1665 (2001).
[20] W. Dai and R. Nassar, An unconditionally stable finite difference scheme for
solving 3-D heat transport equation in a sub-microscale thin film, Journal of
Computational and Applied Mathematics 145, 247 (2002).
[21] W. Dai and R. Nassar, A compact finite difference scheme for solving a threedimensional heat transport equation in a thin film, Numerical Methods for
Partial Differential Equations 16, 441 (2000).
[22] J. Zhang and J. J. Zhao, Unconditionally stable finite difference scheme
and iterative solution of 2D microscale heat transport equation, Journal of
Computational Physics 170, 261 (2001).
[23] J. Zhang and J. J. Zhao, Iterative solution and finite difference approximations
to 3D microscale heat transport equation, Mathematics and Computers in
Simulation 57, 387 (2001).
[24] K. S. Chiu, Temperature dependent properties and microvoid in thermal
lagging, PhD Dissertation, University of Missouri-Columbia, Columbia,
Missouri (1999).
[25] D. M. Young, Iterative Solution of Large Linear Systems, Academic Press, New
York (1971).
26
[26] J. Douglas and J. E. Gunn, A general formulation of alternating direction
methods, Numerische Mathematik 6, 428 (1964).
[27] Illayathambi Kunadian, J. M. McDonough, Ravi Ranjan Kumar, An efficient
numerical procedure for solving a microscale heat transport equation during
femtosecond laser heating of nanoscale metal films, ASME InterPACK ’05, San
Francisco, CA, USA, July 17–22, 2005.
[28] R. R. Kumar, I. Kunadian, J. M. McDonough, M. P. Mengüç and T.
Yang, Alternative to Krylov methods for efficient numerical solution to timedependent 3-D microscale heat transport equations, in preparation.
[29] E. Isaacson and H. B. Keller, Analysis of Numerical Methods, (originally
published by John Wiley & Sons, New York, 1966) Dover Publ. Inc. New York
(1994).
[30] S. D. Brorson, A. Kazeroonian, J. S. Moodera, D. W. Face, T. K. Cheng,
E. P. Ippen, M. S. Dresselhaus and G. Dresselhaus, Femtosecond room
temperature measurements of the electron-phonon coupling constant λ in
metallic superconductors, Physical Review Letters 64, 2172 (1990).
27