LEARNING PROBLEM CLASSES BY MEANS
advertisement

From: AAAI-84 Proceedings. Copyright ©1984, AAAI (www.aaai.org). All rights reserved.
LEARNINGPROBLEM CLASSES BY MEANS OF EXPERIMENTATION
AND GENERALIZATION
AgustlnA. Araya
Departamentode Cienciade la Computacibn
P. UniversidadCatolicade Chile
Casilla 114-D,Santiago, Chile
ABSTRACT
We discuss a method of learning by practice
based on the idea of determining classes of
problemsthat can be solved in simplifiedways, A
description of a class is obtainedby processes
that hypothesize descriptions, generate and
classify problem variations, and test the
hypothesesagainstthem. The approach has been
implementedin a system that learns by practicein
a domain of elementaryphysics. The system has
two main components, a Problem Solver and a
LearningAgent. The Problem Solver handles the
problemsin the domain and the LearningAgent does
the actual learning. To perform its tasks the
Learning Agent utilizes algorithms,heuristics,
and domain knowledge,and for this reason it can
be regarded as an expert system whose expertise
resides in being able to learn by experimentation
and generalization.
1.
We report researchon a method of learningby
practice that provides these capabilitiesto a
certaindegree. The method is embodied in a
system called DARWIN that functionsin a domain of
elementary physics in which interacting ideal
rigid bodies are in equilibrium. Startingwith a
generalmethod of solving problemsin the domain,
the system learns problem classes and their
correspondingspecializedmethods of solution by
means of experimentationand generalization. This
presentation is organized as follows:
after
characterizingthe problem under study an overview
of the learningapproachis given, the processes
used to obtain a descriptionof a problem class
are explained,and some of the limitations and
difficultiesencounteredare discussed.
2.
THE PROBLEM
In the descriptionof the ISAAC system [IO],
that solves physics problems stated in natural
language,it was noted that for some of the
problems that it solved a human expert would have
produceda simpler solution. This observation
lead us to considerthe followingsituation. Let
us suppose that a system has a generalmethod for
solvingproblemsin its domain. One of the things
it can learn by practice is that there are
problems that can be solved in simplifiedways,
that is:
INTRODUCTION
In recent years learning
has
been
increasingly recognized as an importantarea for
Artificial Intelligence research ([61,[11lL
While human expert behavior is characterizedby
the abilityto increaseexpertiseby learning in
the course of solving problems,current expert
systems lack many importantcapabilities in this
respect: i> They are not capable of analyzing
their own solutions, and thus, they cannot
determine if a solutioncan be *‘improved”
(e.g.,
by simplifyingit). ii) They don’t try “mental
experiments”,that is, imaginaryproblemsin which
they could apply new methods or heuristics that
might improvetheir problem solvingcapabilities.
iii) They are not capableof remembering. If they
are given a problem similar,or even identical,to
one previouslysolved, they will not recognize
this fact and will repeat the solutionprocess.
IF problembelongs-toproblem-classj
THEN use special-methodj
Thus, two things must be
learned:
a
description of
a
problem class and its
correspondingspecialmethod. One way of doing
this is by applyinga deductiveapproach. If the
system had a theory of the domain it could deduce
that for problemshaving certaincharacteristicsa
simplifiedsolutioncould be obtained. In this
paper, on the other hand, we take an empirical
approachin which the system tries to determine
descriptions of problem classes by performing
experiments. Thus, a theory of the domain is not
necessary and this represents an important
advantage because the experimentation and
generalization methods can be made relatively
independentof the domain. The price one pays,
-------------------This work was partiallydone at the Departmentsof
Computer Science of the Universityof Texas at
Austin, and the P.UniversidadCatdlica de Chile.
It was supported in part by grant 216/82 of the
Direccidnde Investigaci6n,P.UniversidadCatblica
de Chile.
11
however, is diminishedcertaintyof the acquired
knowledge. Since exhaustive experimentation is
impossible, this knowledge represents only
plausibleconjectures. Research on learning by
practice and discovery has been reported in
generalization methods are
[41, [61 and [91,
a method of
presented in
and [81,
[21,[71
experimentation
based on perturbationis proposed
and expertise in solving problemsin
in [31,
physicshas been analyzedin [l] and [5l.
3.
the most important and complex and will be
analyzed in detail in the next section. Due to
space limitationsthe other two stages will not be
given furtherconsideration.
4. DETERMININGA DESCRIPTIONOF A PROBLEM
CLASS
The learning situation under study is
characterized by an importantfact: the system
has made a single observation that a specific
problem can--&-solved in a simplifiedway. This
fact is in itself useless,because the likelihood
that exactlythe same problemwill be encountered
by the system in the future is nil, so that this
knowledge will most likely never be used! This
impliesthat the systemmust perform some kind of
generalizationto determinea class of problemsto
which the specializedsolutionapplies. In order
for the system to obtain a generalizationfrom
only one observation it needs to perform
experiments to gather additional information.
Thus, the determinationof the descriptionof the
problem class is carried out by two highly
intertwined processes: experimentation and
generalization. To perform these tasks the LA
utilizes
algorithms, heuristics, and domain
knowledge, and for this reason it can be regarded
as an expert system whose expertise resides in
being able to learn by experimentation and
generalization.
OVERVIEWOF THE LEARNINGAPPROACH
The approachhas been implementedin a system
with two main components: a ProblemSolver (PS)
and a LearningAgent (LA). To emphasizethe fact
that the Learning Agent is responsiblefor the
evolutionof the problem solver by developing
specializedsolutionmethods to cope with problems
in its domain, we refer to it as the DARWIN
system.
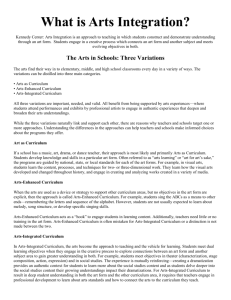
Analyze solutionof problem
Determineproblem class description:
cycle
Hypothesizedescriptions
Generateproblem variations
Classifyvariations
Test descriptionsagainst
variations
end cycle
Build specializedmethod and integrate
it in PS
The description of the class will be
expressed in terms of first order logic and will
be based on the problem description and the
backgroundknowledgeavailableto the system [12].
The latter kind of informationcan be classified
as follows: i) predicatesthat refer to relations
of
objects
(e.g.:
positions
between
"symmetrically located", "at left end")* ii)
predicates that refer to relations Aetween
attributes of objects (e.g.: "perpendicular",
"same size"); and iii) predicatesthat refer to
attributes of objects (e.g.: "angle of force
equal to x1'). To constrainthe search space we
have decomposedthe process so that at each stage
differentkinds of predicates are determined in
the
previous
indicated by
order
the
classification.We illustratethe processwith an
example:
Fig.1: Outline of the Learning
Process
The PS starts with a general method that
allows it to solve problems in its elementary
physics domain. The method is based on the
principles of equilibriumof forces and moments.
The LA acts as a supervisorof the PS and its task
can be divided into the followingstages (See
Fig.1): 1) Determineif a given problem can be
solved in a simplifiedway: using knowledgeabout
the domain, the solutionis analyzedto see if it
has some specialcharacteristicsthat could lead
to simplifications (e.g., that one or more
equations produced by the generalmethod are not
2)
actually needed to solve the problem).
Determine a description of the problem class:
when it has been found that the solution of a
can be
simplified the LA uses
problem
experimentationand generalization processes to
obtain a descriptionof the class, in such a way
that all the problems belonging to it can be
solved in the same simplifiedway. 3) Derive the
specializedmethod and integrateit into the PS:
using knowledgeabout the problemdomain and about
informationconsumedand producedat each step of
the general solutionmethod, the system builds the
specializedsolutionmethod and adds it to the PS.
The new method can be obtainedby eliminating
steps from the general method and by replacing
some steps by simplerones. The second stage is
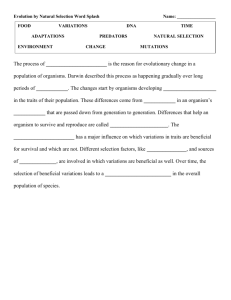
"A horizontal lever 15
ft long is
supported at the left and right ends by a
pivot and rolling pivot, respectively.
Two forces are applied to the lever, one
which has a magnitudeof 120 lb, an angle
of 270 degrees.and is appliedat a point
3 ft from the left end; and anotherwhich
has a magnitudeof 120 lb, an angle of 270
degrees,and is applied at a point 12 ft
from the left end. Determinethe forces
exertedby the pivots so that the lever is
in equilibrium."(See Fig.2a).
12
to obtain as general as possiblea descriptionthe
system should try to eliminate them. This is
accomplished by proposing variations of
the
original problem and seeing how the predicates
behave with respect to them.
To determine
interesting problem variationsthe system uses a
method based on what we call the “mutual support
principle** (MSP).
Let us assume that the
descriptionof the problem class will be expressed
as a conjunctionof predicates. (In general, it
will consistof a disjunction of conjuncts, but
the MSP can be easily restated to cover that
case). The MSP simply says that conjuncts
l*supportl*
each other in the sense that negative
variationsnot rejectedby one conjunct must be
rejected by others, and positivevariationsmust
be acceptedby all predicates(See 4.1.3, below).
Fig. 2a: Initial Problem
is-45
Fig. 2b: Most General Problem
After preprocessingthe initial description
the followinginformationis obtained:
lever:
weight=0
angle=0
length=15
force1:
force2:
magn=120
magn=120
angle=270
angle=270
pos=3
pas=12
desunk=False
desunk=False
pivot:
pos=o
desunk=True
rpivot:
pos=15
desunk=True
(rpivot:rolling
pivot; desunk:desiredunknown;
pos:position)
The PS producesa solution to the problem
which is then analyzedby the LA. The following
special characteristics are detected:
the
horizontal component of the force appliedby the
pivot is zero, the vertical components of the
forces appliedby the pivot and the rollingpivot
have the same magnitude,and all the torques due
to horizontalcomponentsof the forces are zero.
4.1 DeterminingPositionand AttributeRelations
The system starts by determining which
relations between positions and attributes of
objects are important.
Using this principle,problem variations are
generated as follows: for every predicatefound
true in the initialproblemgenerate,if possible,
**true’*
and **false**
variations(T-varsand F-vars,
respectively). A T-var with respect to
a
predicate is a variationin which the predicate
evaluates to true. A false variation is
a
variation in which the predicate evaluatesto
false. T-vars and F-vars are generated using
functions in the backgroundknowledge,associated
with each predicate. In general there may be
severalways of generatingT and F-variationsfrom
a predicate. Let us consider the predicate
mirrorangles(forcel,force2).F-variationscan be
generatedas follows: a) leave the angle of
force1 fixed and select a random angle for force2;
b) fix angle of force2 and select a random angle
for forcel; c) select random angles for both
force1 and force2. In all of these variationsthe
predicate evaluates to False, as desired. The
other predicatesare affectedin different ways.
For instance, perpendicular(force2,lever)
will
evaluateto False in a) and c), but will evaluate
to True in b). We can concludefrom this that in
order to obtain useful variations, as many
differentways of generatingthem as possiblemust
be considered.
4.1.3
Classify variations: The variations
generated must be classifFedas positive (POS) or
negative (NEG) according to * whether their
solutions do or do not have the same special
characteristics
that were detected in the solution
of the initialproblem.
4.1.1 HypothesizeDescriptions: The system uses
backgroundknowledgeand hypothesizesthat the set
of predicatesthat evaluateto True in the initial
problem constitutes a descriptionof the class.
The followingpredicatesdefined in the background
knowledgeare true in the initialproblem:
4.1.4
Test the descriptions: Finally, the
predicaKar=ested
againstthe sets of POSs and
~GS.
In addition,since the system is trying to
obtain as general as possiblea description,a
“most general**
variationmust be picked from all
the POSs variations. The criterionused is to
select the one that is rejetted by more
predicates, because that means that it satisfies
fewer constraints. (In general, this criterion
may give more than one “most general”variation,
meaning that there are alternative most general
structures. In the current implementationthe
system picks any one of them). Once a most
general variationis selected,the predicatesthat
reject it are eliminated,as long as all the NEGs
are still rejetted. Continuingwith the example,
(*c>
(I) symloc(pivot,rpivot)
atleftend(pivot)
(2)
atrightendcrpivot)
(3)
force1,force2)
(4) symloc(
forcel, force2)
(5) sameangles{
perpendicular
(force1,lever>
(6)
perpendicular(force2,lever)
i;i; samesize(forcel,force2)
(9) mirrorangles(forcel,force2)
(*) (symloc:symmetricallylocatedwith
respect to the center of the lever)
4.1.2 GenerateProblemVariations: Some of these
necessaryand since we want
relations may not
13
it turns out that predicates (2),(3),(5),(6)
and
(7) can be eliminated, which means that the
initialproblem satisfied more constraints than
needed. Thus, we obtain a new, more **general**
problem,in which the forces don’t have to be
perpendicular to the lever, the pivots don’t need
to be at the ends of the lever, and whose solution
has the same special characteristics as the
solutionof the initialproblem (See Fig.2b).
4.2 Consideringproblems-with a differentnumber
of objects
cSo far in our analysisthe number of objects
has remained constant. But in the domain we are
consideringthere may be several forces appliedto
a rigid body, so that it is worth exploringsuch
cases.
above accepts all POSs and rejects all NEGs
generatedat this stage, so that it constitutes a
partial descriptionof the class.
4.3 ConsideringValues of Attributesof Objects
In the previousstages the system obtained a
partial description of the problem class that
takes into account relationsbetween positionsand
attributes of different objects. In this last
stage it is necessaryto take into account the
single objects.
attributes of
of
values
Additionalbackground knowledge about *lspeciall*
values of attributesof objects
and “non-special**
attribute of
is used. For instance,the **weight**
a lever has **O**
as specialvalue. Any other value
is non-special. Using this knowledge new
predicatesare hypothesizedand tested.
At the end of the whole processthe following
predicates were obtained for the problem class
under study:
4.2.1
Hypothesize Descriptions: The approach
consistsof replacingthe constantsthat appear in
variables and then of
the predicates by
quantifying these variables so that they range
over sets of objects. The system uses heuristics
to constrain the number of quantifiedpredicates
that are generated. For the example above, let
(forallfl (thereisonef2
(symloc(f1
,f2) and
samesize(f1
,f2) and
mirrorangles(f1
,f2)) >>,
(forallpivot (forallrpivot
symloc(pivot,rpivot)
>>,
(foralllever (lever.angle= O)),
one(pivot),one(rpivot).
P = [symloc(forcel,force2)
and
samesize(forcel,force2)
and
mirrorangles(forcel,force2)1.
That is, P representsthe conjunctionof all the
predicates involvingforces that were true in the
most general problem. The system generates all
predicatesof the form: (quantlfl (quant2f2 P>>
in which quantl and quant2 can be the quantifiers
“for all”, “there isI1 and **there is one**.
(Additionalpredicatesare generatedby adding the
clause notequal(fl,f2)
to some of those quantified
predicates).
and
4.2.2 Generate Problem Variations: T
from each hypothesis,
F-variations are -ted
using heuristicsthat depend on the quantifiers
and basic predicates that appear in them. For
instance,considerthe predicate
PI = (forallfl (thereisonef2
(symloc(f1
,f2) and
samesize(f1
,f2) and
mirrorangles(fl,f2))
1)
T-variationsfrom this predicatecan be generated
by adding two forces,one of them with arbitrary
attributevalues, and the other such that all the
basic predicatesare satisfied. F-variationscan
be obtainedby adding one or two arbitraryforces.
4.2.3 Classifythe variations: Similar to the
processdescribFin Section4.1.3.
4.2.4 Test the Hypotheses: The system tries to
determ=
aminimal set of predicatesthat accept
all POSs and reject all NEGs, This is carriedout
by a process which is a modification of one
disjunctive
proposed in
II71 to obtain a
description of a concept. After performingthis
process for the example, predicate PI defined
14
5.
DISCUSSIONAND CONCLUSIONS
In a typical inductive situation a set of
positive and negative instancesof a concept is
given. In the approach described above this
informationis lacking,so that the search for the
descriptionof the problem class develops in two
spaces: the space of descriptionsand the space
of variations. The experimentswe have performed
show that the process of classifyingthe problem
variationsis the most expensive. For the example
given above, approximately300 problem variations
had to be classified. (The exact number depends
on the background knowledge available to the
current
(interpreted)
the
system).
In
implementationof the problem solver it takes an
averageof 9 secondsto solve a problem. In order
classify the proposed variations of the
to
originalproblem they must first be solved. Thus,
for the system to learn this new class it would
need 2700 secondsplus the (substantially
smaller)
time required to carry out the other processes
involved. To lower this cost we have followed a
**mixed**
approach in which the variations are
classifiedby the instructor(who is informed by
the system of the specialcharacteristicstheir
solutions should satisfy). If, however, the
instructor is in doubt about any specific
variation,he lets the system to classify it by
itself. In the experimentsperformed,the DARWIN
system has learned several problem classes that
have simplified solutions. It has also learned
problem classes in which the unknown(s) take
special values which are rememberedby the system,
and problem classes in which heuristics that
transform a problem into a simplerone, can be
validly applied.
ACKNOWLEDGMENTS
The classesthat can be learnedby the system
are essentiallydeterminedby the kinds of special
characteristicsthat it can detect in a solution
and by the informationavailablein the background
knowledge. If the system is not capable of
detecting some interesting characteristics
of a
solutionthen it will not even start a learning
episode. On the other hand, once a learning
episode is triggered,the correspondingclass will
be learnedonly if the system has the appropriate
predicatesin the languageto express it. (The
lack of a predicatewill be detectedby the system
during the testingphase, because there will be
negative variations that will not be rejected).
Also, the explorationcapabilitiesof the system
are determined by the functionsand heuristics
that it uses to generate variations. The
inability to generatecertain kinds of variations
may lead to learning less general descriptions
(i.e., subclassesof problems)or, even, incorrect
descriptions. A detailed discussion of
this
point, however,is beyond the scope of this paper.
In order to apply the learning method to
anotherdomain it will be necessaryto replace the
backgroundknowledgethat the system currentlyhas
by the background knowledgeappropriatefor the
new domain. This can be done without difficulty.
There are certain characteristics
of the current
domain,however,that are more deeply embedded in
the system, so that it may be necessaryto make
some non-trivialchangesto it. An example of
this is the order in which differentaspectsof a
problem are examined. More importantly, in some
domains it may be difficultor even impossibleto
have the system classifythe variationsby itself.
In those cases a human instructorwill have to
perform that task. Also, the **wellformedness**
of
the variationsgeneratedby the systemmay become
an issue. By the nature of the problems in the
physics domain it was very easy to generate
**legal**
problems,but this may not be the case for
other domains so that complex rules of formation
may have to be introduced.
I would especiallylike to thank Gordon Novak
for many discussionsof the ideas presentedhere.
I would also like to thank Julian Gevirtz for his
comments and his assistance in editing earlier
drafts of this paper.
REFERENCES
1.
Chi,M.T., Feltovich,P.J. and
Glaser,R.
**Representationof
Physics Knowledge by
Experts and Novices*'Tech.Rep.2. Learning
Researchand DevelopmentCenter,Universityof
Pittsburgh,1980.
2.
Dietterich,T. and Michalsky,R. **Learning
and
Generalizationof CharacteristicDescriptions:
EvaluationCriteriaand ComparativeReview of
Selected Methods*'In Proc. IJCAI-79,Tokyo,
Japan, August 1979.
3.
Kibler,D. and Porter,B. "Perturbation: A
In Proc.
Means for Guiding Generalization**
IJCAI-83,Karlsruhe,Germany,August 1983.
4.
Langley,P., Bradshaw,G.L. and
l*RediscoveringChemistry with
system**In Machine Learning,
Carbonel, Mitm(Eds),
Tioga
Company, 1983.
5.
Larkin,J.L, McDermott,J., Simon,D.P.
and
Simon,H.A. **Modelsof Competencein Solving
Physics Problems**. Tech.Rep.
CIP 408,
Dept.of Psychology,Carnegie-Mellon
University,1979.
6.
Heuristics in
Lenat,D.B. "The Role of
Learningby Discovery: Three Case Studies"In
Machine- Learning,- Michalsky, Carbonell,
Mitchell (Eds), Tioga Publishing Company,
1983.
7.
Michalsky,R.S. **ATheory and Methodology of
Inductive Learning**Artificial Intelligence
20:2
When comparingthe method proposedhere with
inductive methods in which sets of positiveand
negativevariationsare given by an instructor,
certain advantages and disadvantages can be
discerned. The main advantageis that a system
implementing this method is more autonomousthan
other systemsbecause insteadof being a passive
receptor of instancesit is an active explorerof
the domain, and so is less dependent on an
instructor. Disadvantages are that, i> as the
system assumesmore of the burdensof the learning
process its complexityis increased,and iij the
method may not be applicableto some domains, as
was indicated above. A detailed comparison
between the two kinds of approachesconstitutesan
important topic for research,because it may very
well be that the advantagesof the new method far
outweigh its disadvantages,at least for certain
domains.
15
(1983)
Simon,H.A.
the BACON
Michalsky,
Publishing
111-161.
8.
Mitchel1,T.M. **Generalizationas Search**
ArtificialIntelligence18:2 (1982) 203-226.
9.
and
Mitchell,T.M., Utgoff,P.E., Nudel,B.
Solving
Banerji,R.
**Learning Problem
Proc.
Heuristics through Practice" In
IJCAI-81,Vancouver,August 1981.
IO.
Novak,G.S. "ComputerUnderstandingof Physics
Problems Stated in NaturalLanguage"American
Journal
of
Computational Linguistics,
%nche
3, 1976.
11.
Schank,R.C. **TheCurrentState of AI: One
Man's OpinionI*-AI Magazine4:l (1983) 3-8.
12.
'*Induction of
Relational
Vere,S.A.
Productions in the Presence of Background
Information**
In Proc. IJCAI-77,
Cambridge,Mass.,
August 1977.