T St. Venant Torsion Multi-cell

St. Venant Torsion Multi-cell
applied torque this is a combination of nomenclature from Hughes section 6.1 Multiple Cell
Sections and Mixed Sections page 227 ff and Kollbrunner sectin 2.3 Multicelluar Box
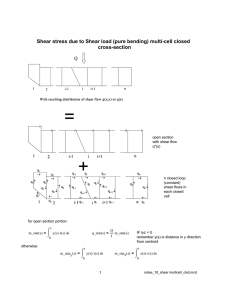
Section Members cross section (partial) shear flow (concept)
T i-1 i i+1 q i-1 q i-1 q i-1 q i-1 q i q i q i q i q i+1 q i+1 q i+1 q i+1 first recall ... angle of twist (same for all cells) torque in a cell = Mx i
= ⋅ i
⋅ q i shear flow constant, integral of shear stress*h*dA = torque etc...
φ ' =
T
⋅
=> total torque Mx = T =
∑
Mx i i
=
∑
2 A i
⋅ q i i
H: 6.1.26
i.e. ... the derivative of the twist angle wrt the axial H: 6.1.21 coordinate is = applied torque/torsional stiffness and from our development of pure twist (closed section) u =
⌠
s
⌡
0
τ
G ds −
δφ ⌠
δ x
hD ds + u0 x &H: 6.1.23a
if this quantity is integrated entirely around a closed section ...
⌠
s
⌡
0
τ
G ds −
δφ ⌠
δ x
hD ds = 0 the axial displacement returns to the starting point rearranging and substituting q = τ *t....
⌡ s
0 q ds = t
δφ
δ x
⋅ G
⌠
⌡ hD ds and since
⌠
hD ds = 2 ⋅ A
1
2
⋅ ( ) ⋅ altitude ( ) = dA
⌠
⌡
0 s q ds = t
δφ
⋅ G ⋅ 2 ⋅ A =
δ x
T
⋅
⋅ G ⋅ 2 ⋅ A =
G J
2T
⋅ A
J
1 torsion_st_v_multi_cell.mcd
now we have enough pieces to assemble the puzzle ... for each cell ....
0 s q t
ds =
2T
⋅ A
J i
i the shear flow q in cell i is composed of qi (reference direction) and segments of qi-1 and qi=1 in opposite direction
ON COMMON BOUNDARY.
i.e. .....
s q
0 t
⌠ b ds =
i
⌡
0 q i t
⌠
s1(i_and_i − 1) ds −
⌡ s0(i_and_i − 1) q i 1 t
⌠
s1(i_and_i + 1) ds −
⌡ s0(i_and_i + 1) q t ds the individual shear flows are constant .... "normalize" the shear flow by 2*T/J Hughes retains G but the approach is the same q q_bar =
2 T
J
s q_bar
0 t ds
i
= − q_bar i 1
⌠
s1(i_and_i − 1) s0(i_and_i − 1)
1 t ds + q_bar i
⌠ b
⌡
0
1
t ds − q_bar i 1
⌠
s1(i_and_i + 1) s0(i_and_i + 1)
1 t ds = A i this is a set of equations, one for each cell corresponding to qi, like shear but with different rhs.
1 1,2 q_bar1
⌠
⋅
1 ds −
t
⌡ q_bar2
⌠
⌡
1 t ds
1
− q_bar1 ⋅
1,2
⌠
⌡
1,2
1 d s + t q_bar2 ⋅
⌠
⌡
1 d t s − q_bar3 ⋅
⌠
⌡
2
− q_bar2 ⋅
⌠
⌡
2,3
2,3
1 d s + t q_bar3 ⋅
⌠
⌡
3
1 t d
3,4 s −
1 t d s q_bar4 ⋅
⌠
⌡
1 d s t
= A
1
= A
2
= A
3
.............. ............... .............. = ........ q_bar ⋅
⌠
⌡ n-1,n
1 d s − t q_barn ⋅
⌠
⌡ n
1 d t s = A n
2 torsion_st_v_multi_cell.mcd
as we did for shear due to bending; let each element of the matrix
⌠
1
t
⌡ ds be expressed by η where η ik
=
⌠
1
⌡ t ds integral along wall separating i and k i,k and η ii
=
⌠
1
t
⌡ ds integral around cell i etc if wall thickness is piecewise constant walls =>
η ik
= sik tik where sij , and η ii
=
4
∑ j = 1 sij
= tij si1
+ ti1 si2
+ ti2 si3
+ ti3 si4 ti4 tij is the length and thickness of wall j of cell i and thus we have .... for the three cell arranged as above ...
η
11
−η
21
−η
12
η
22
0 −η
32
0
−η
23
η
33
q_bar
⋅
q_bar q_bar
1
2
3
=
A
1
A
2
A
3 solve for q_bar i q i
= q_bar i
⋅
J
T =
∑
2 A i
⋅ q i i
=
∑
2 A i
⋅ q_bar i
⋅ i
J q i q_bar i
= T ⋅
∑ i
2 A i
⋅ q_bar i
=> J =
∑
4 A i
⋅ q_bar i i
3 torsion_st_v_multi_cell.mcd