Document 13664413
advertisement

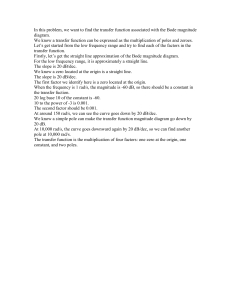
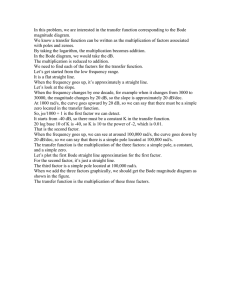
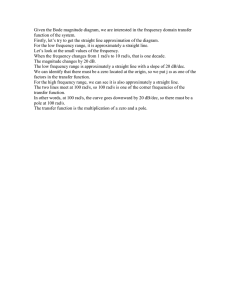
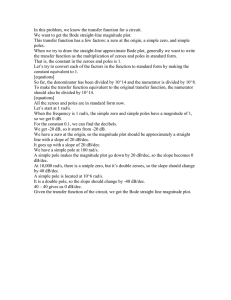
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering 2.004 Dynamics and Control II Fall 2007 Lecture 38 Overview of the frequency response and Bode plots In this lecture, we’ll practice on the topic of frequency response and Bode plots. Se­ lect at least one partner, and work out the problems together. Call on the instructor(s) for help. 1 1. Consider the following eight distinct systems whose pole–zero plots are provided. Match them their bode plots given in the next page. Pole−Zero Map 2 (double poles at zero) Pole−Zero Map 1 (one pole at zero) 2 2 1.5 1.5 1 Imaginary Axis Imaginary Axis 1 0.5 0 −0.5 0.5 0 −0.5 −1 −1 −1.5 −1.5 −2 −2 −1.5 −1 −0.5 1 0 Real Axis 0.5 1 1.5 −2 −2 2 −1.5 −1 2 1.5 1.5 Imaginary Axis Imaginary Axis 0 −0.5 −1 −1.5 −1.5 −1 −0.5 0 Real Axis 0.5 1 1.5 −2 −2.5 2 −2 −1.5 −1 −0.5 4 0 0.5 Real Axis 1 1.5 2 2.5 1.5 2 1.5 2 Pole−Zero Map 6 (one pole at −1, one zero at 1.2) 4 2 3 1.5 1 Imaginary Axis 2 Imaginary Axis 2 0 Pole−Zero Map 5 (two poles at −1± j3) 1 0 −1 0.5 0 −0.5 −2 −1 −3 −1.5 −1.5 −1 −0.5 5 0 Real Axis 0.5 1 1.5 −2 −2 2 1.5 1.5 1 1 Imaginary Axis 2 0.5 0 −0.5 −1.5 0.5 1 0.5 1 −0.5 −1.5 0 Real Axis 0 Real Axis 0 −1 −0.5 −0.5 0.5 −1 −1 −1 Pole−Zero Map 7 (one pole at −1, one zero at zero) 2 −1.5 −1.5 6 Pole−Zero Map 7 (one pole at −1, one zero at −1.2) Imaginary Axis 1.5 −0.5 −1 3 7 1 0.5 −1.5 −2 −2 0.5 1 1 0.5 −4 −2 0 Real Axis Pole−Zero Map 4 (two poles at −1 and −2) Pole−Zero Map 3 (one pole at −1) 2 −2 −2 −0.5 2 1.5 −2 −2 2 8 2 −1.5 −1 −0.5 0 Real Axis 0.5 1 Bode plots: Bode Plot Bode Plot 5 Magnitude (dB) 5 0 −5 0 −5 −10 −15 −10 180 −20 0 135 −45 Phase (deg) Phase (deg) Magnitude (dB) 10 90 45 0 −1 10 a 0 −180 0 10 1 10 Frequency (rad/sec) (rad/sec) 10 −90 −135 b 1 10 Frequency (rad/sec) (rad/sec) Bode Plot Bode Plot 0 0 Magnitude (dB) Magnitude (dB) 10 −10 −20 −30 −90 Phase (deg) Phase (deg) −20 −30 −40 0 −40 0 −180 −270 −360 0 10 c −10 −60 −90 −2 10 1 10 d Frequency (rad/sec) (rad/sec) −30 −1 10 0 10 Magnitude (dB) Magnitude (dB) −10 −20 −30 −40 Phase (deg) Phase (deg) 5 0 −5 −10 0 −50 90 60 30 0 −2 10 −1 10 0 1 10 −30 −60 −90 −1 10 2 10 10 Frequency (rad/sec) (rad/sec) f 0 10 Frequency (rad/sec) (rad/sec) 0 Magnitude (dB) −20 −40 −60 −20 −40 −60 −80 −80 0 −100 0 −45 −45 Phase (deg) Magnitude (dB) Phase (deg) g 1 10 Bode Plot Bode Plot 0 −90 −135 −180 −1 10 2 10 Bode Plot Bode Plot 0 e 1 10 10 Frequency (rad/sec) (rad/sec) 0 1 2 10 10 Frequency (rad/sec) (rad/sec) 10 3 h −90 −135 −180 −1 10 0 1 10 10 Frequency (rad/sec) (rad/sec) 2 10 2. Nise chapter 10, problem 25 (page 679). 3. Nise chapter 10, problem 23 (page 679). 4 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering 2.004 Dynamics and Control II Fall 2007 Supplement to Lecture 38 Solution to the practice problems on frequency response & Bode plots 1. Consider the following eight distinct systems whose pole–zero plots are provided. Match them their bode plots given in the next page. 1.1 Answer: Pole−Zero Map 1 (one pole at zero) 2 1.5 Imaginary Axis 1 0.5 0 −0.5 −1 −1.5 −2 −2 −1.5 −1 −0.5 0 Real Axis 0.5 1 1.5 2 This system has a pole at s = 0, its transfer function will be Ga (s) = K , s where K is a gain. The Bode magnitude plot has -20dB/dec slope and the Bode phase plot is always −90◦ . Bode Plot Magnitude (dB) 5 0 −5 −10 −15 Phase (deg) −20 0 −45 −90 −135 −180 0 10 1 10 Frequency (rad/sec) (rad/sec) 1.2 Answer: 1 Pole−Zero Map 2 (double poles at zero) 2 1.5 Imaginary Axis 1 0.5 0 −0.5 −1 −1.5 −2 −2 −1.5 −1 −0.5 0 Real Axis 0.5 1 1.5 2 Because this system has double poles at s = 0, the transfer function will be K . s2 The Bode magnitude plot has -40dB/dec slope and the Bode phase plot is always −180◦ . Gb (s) = Bode Plot Magnitude (dB) 10 0 −10 −20 −30 Phase (deg) −40 0 −90 −180 −270 −360 0 10 1 10 Frequency (rad/sec) (rad/sec) 1.3 Answer: Pole−Zero Map 3 (one pole at −1) 2 1.5 Imaginary Axis 1 0.5 0 −0.5 −1 −1.5 −2 −2 −1.5 −1 −0.5 0 Real Axis 0.5 1 1.5 2 This system has a pole at s = −1, the transfer function will be G3 (s) = K . s+1 The break frequency is ω = 1 (rad/s). Before the break frequency, the Bode magnitude plot is flat and after the break frequency it decreases with −20 2 dB/dec slope. In the Bode phase plot, the phase at low frequencies is 0◦ and decreases to −90◦ over 2 decade bandwidth around the break frequency. Bode Plot Magnitude (dB) 0 −10 −20 −30 Phase (deg) −40 0 −30 −60 −90 −2 10 −1 10 0 1 2 10 10 Frequency (rad/sec) (rad/sec) 10 1.4 Answer: Pole−Zero Map 4 (two poles at −1 and −2) 2 1.5 Imaginary Axis 1 0.5 0 −0.5 −1 −1.5 −2 −2.5 −2 −1.5 −1 −0.5 0 0.5 Real Axis 1 1.5 2 2.5 This system has two poles at s = −1 and s = −2. The transfer function will be K . G4 (s) = (s + 1)(s + 2) The break frequencies are ω = 1 (rad/s) and ω = 2 (rad/s). The Bode magnitude plots indicates −20dB/dec and the Bode phase plots indicates −90◦ at each break frequency. Bode Plot Magnitude (dB) 0 −20 −40 −60 −80 Phase (deg) −100 0 −45 −90 −135 −180 −1 10 0 1 10 10 Frequency (rad/sec) (rad/sec) 1.5 Answer: 3 2 10 Pole−Zero Map 5 (two poles at −1± j3) 4 3 Imaginary Axis 2 1 0 −1 −2 −3 −4 −2 −1.5 −1 −0.5 0 Real Axis 0.5 1 1.5 2 This system has a pair of complex poles at s = −1 ± j3. The transfer function will be K K , = 2 (s − (−1 + j3))(s − (−1 − j3)) s + 2s + 10 √ √ √ where ωn = 10 and ζ = 1/ 10. Since ζ < 1/ � 2, the resonance peak should be observable. The peak frequency is ωp = ωn 1 − 2ζ 2 = 2.82(rad/s) and the correction is −20 log(2ζ) ≈ 4 dB. In Bode phase plot, at low fre­ quencies, the phase is 0◦ and it decreases to −180◦ over 2 decades bandwidth around the peak frequency. G5 (s) = Bode Plot Magnitude (dB) 0 −20 −40 −60 Phase (deg) −80 0 −45 −90 −135 −180 −1 10 0 1 2 10 10 Frequency (rad/sec) (rad/sec) 10 1.6 Answer: Pole−Zero Map 6 (one pole at −1, one zero at 1.2) 2 1.5 Imaginary Axis 1 0.5 0 −0.5 −1 −1.5 −2 −2 −1.5 −1 −0.5 0 Real Axis 0.5 1 1.5 2 This system has a pole at s = −1 and a zero at s = 1. 2. The transfer 4 function will be G6 (s) = K(s − 1.2) . (s + 1) The Bode magnitude plot gets +20 dB/dec at the zero and -20 dB/dec at the pole. Therefore, at the low and high frequencies, the Bode magnitude plot would be flat. Since the two break frequencies are very close, the Bode magnitude plot looks almost flat. In the Bode phase plot, the zero in the right–hand plane has the same effects as the pole in the left–hand plane, the total phase change is −180◦ . When you plug in s = 0, then g6 (s = 0) = −K/1.2, which is a negative value. Thus the Bode phase plot starts at −180◦ or 180◦ and decreases by −180◦ . Bode Plot Magnitude (dB) 10 5 0 −5 Phase (deg) −10 180 135 90 45 0 −1 10 0 1 10 Frequency (rad/sec) (rad/sec) 10 1.7 Answer: Pole−Zero Map 7 (one pole at −1, one zero at −1.2) 2 1.5 Imaginary Axis 1 0.5 0 −0.5 −1 −1.5 −2 −2 −1.5 −1 −0.5 0 Real Axis 0.5 1 1.5 2 This system has a pole s = −1 and a zero at s = −1.2. The transfer function will be K . G7 (s) = (s + 1)(s + 1.2) The Bode magnitude plot is identical as the case of (g) since they have the same break frequencies. Because the zero is on the left–hand plane, the total phase is zero. 5 Bode Plot Magnitude (dB) 10 5 0 −5 Phase (deg) −10 0 −30 −60 −90 −1 10 0 1 10 Frequency (rad/sec) (rad/sec) 10 1.8 Answer: Pole−Zero Map 7 (one pole at −1, one zero at zero) 2 1.5 Imaginary Axis 1 0.5 0 −0.5 −1 −1.5 −2 −2 −1.5 −1 −0.5 0 Real Axis 0.5 1 1.5 2 The system has a pole at s = −1 and a zero at s = 0. The transfer function will be Ks . G8 (s) = s+1 Because of the zero at s = 0, the Bode magnitude plot starts with 20dB/dec slope and it becomes flat after the break frequency at ω = 1 (rad/s). To find the Bode phase plot, let’s compute the phase analytically. G8 (jω) = K jω(1 − jω) ω 2 + jω jω = = . 1 + jω (1 + jω)(1 − jω) 1 + ω2 Thus the phase is −1 tan � � 1 . ω If ω is very small, then 1/ω goes to the infinity, which the phase is 90◦ . After the break frequency at ω = 1 (rad/s), the phase decreases by −90◦ due to the pole. 6 Bode Plot Magnitude (dB) 0 −10 −20 −30 −40 Phase (deg) −50 90 60 30 0 −2 10 −1 10 0 1 10 10 Frequency (rad/sec) (rad/sec) 2 10 2. Nise chapter 10, problem 25 (page 679). a. Find the gain margin, phase margin, zero dB frequency, 180◦ frequency, and the closed–loop bandwidth. Answer: From the given Bode plot, the zero dB frequency is ω ≈ 2 (rad/s) and the phase at the zero dB frequency is −130◦ . Therefore the phase margin is −130 − (−180) = 50◦ . The 180◦ frequency is about 6 (rad/s), whose gain is about −12dB. Thus the gain margin is 12dB. To find the closed–loop bandwidth, we find the frequency at which the open–loop magnitude response is between −6 and −7.5 dB if the open–loop phase response is between −135◦ and −225◦ . From the given bode plot, the frequency is approximately 3 (rad/s), thus ωBW = 3 (rad/s). (Refer to page 653 of Nise) b. Use your result in (a) to estimate the damping ratio, percent overshoot, settling time, and peak time. Answer: From the figure 10.48 in page 653 of Nise (or page 8 of Lecture note 32), ζ ≈ 0.45. � � ζπ = 20.5%. %OS = exp − � 1 − ζ2 From the figure 10.41 in page 644 of Nise (or page 7 of Lecture note 32), � � 4 (1 − 2ζ 2 ) + 4ζ 4 − 4ζ 2 + 2 ≈ 3.92 (s)s. Ts = ωW B ζ � � π � Tp = (1 − 2ζ 2 ) + 4ζ 4 − 4ζ 2 + 2 ≈ 1.551 (s). ωW B 1 − ζ 2 3. Nise chapter 10, problem 23 (page 679). a. System 1 Answer: From the following Bode plot, 7 Phase (deg) Magnitude (dB) Bode Diagram 80 60 40 20 0 −20 −40 −90 System: sys1 Phase Margin (deg): 16.7 Delay Margin (sec): 0.03 At frequency (rad/sec): 9.69 Closed Loop Stable? Yes −135 −180 −2 10 −1 0 10 1 10 2 10 10 Frequency (rad/sec) the phase margin is 16.7◦ . The damping ratio ζ is approximately 0.15. Using the same method in question (2), the closed–loop bandwidth ωW B = 14 (rad/s). Thus � � ζπ %OS = exp − � ≈ 62%. 1 − ζ2 Ts = 4 ωW B ζ � (1 − 2ζ 2 ) + π � Tp = ωW B 1 − ζ 2 � 4ζ 4 − 4ζ 2 + 2 ≈ 2.9 (s)s. � (1 − 2ζ 2 ) + � 4ζ 4 − 4ζ 2 + 2 ≈ 0.35 (s). Note that it approximately agrees with the exact step response. System: Closed Loop r to y I/O: r to y Peak amplitude: 1.65 Overshoot (%): 64.6 At time (sec): 0.317 Step Response 1.6 1.4 Amplitude 1.2 1 System: Closed Loop r to y I/O: r to y Settling Time (sec): 2.62 0.8 0.6 0.4 0.2 0 0 0.5 1 1.5 Time (sec) 2 2.5 3 b. System 2 Answer: From the following Bode plot, 8 3.5 Bode Diagram Magnitude (dB) 50 0 Phase (deg) −50 −90 System: sys2 Phase Margin (deg): 29.3 Delay Margin (sec): 0.0794 At frequency (rad/sec): 6.44 Closed Loop Stable? Yes −135 −180 −1 10 0 1 10 2 10 10 Frequency (rad/sec) the phase margin is 29.3◦ . The damping ratio ζ is 0.25. Using the same method in question (2), the closed–loop bandwidth ωW B = 10 (rad/s). Thus � � ζπ %OS = exp − � ≈ 44%. 1 − ζ2 Ts = 4 � (1 − 2ζ 2 ) + ωW B ζ π � Tp = ωW B 1 − ζ 2 � 4ζ 4 − 4ζ 2 + 2 ≈ 2.4 (s)s. � (1 − 2ζ 2 ) + � 4ζ 4 − 4ζ 2 + 2 ≈ 0.48 (s). Note that it approximately agrees with the exact step response. I/O: r to y Peak amplitude: 1.44 Overshoot (%): 44.1 At time (sec): 0.458 1.5 Step Response 1 Amplitude System: Closed Loop r to y I/O: r to y Settling Time (sec): 2.03 0.5 0 0 0.5 1 1.5 2 Time (sec) 9 2.5 3 3.5 4