From: AAAI Technical Report WS-02-06. Compilation copyright © 2002, AAAI (www.aaai.org). All rights reserved.
Miscomputing Ratio: The Social Cost of Selfish
Computing
Kate Larson and TuomasSandholm
Computer Science Department
Carnegie Mellon University
5000 Forbes Ave
Pittsburgh, PA15213
{klarson,sandholm} @cs.cmu.edu
Abstract
requires computingthe subcontractor’s manufacturing plan.
A normative deliberation control model of how
additional work (e.g., computing) refines valuations was recently introduced (Larson &Sandholm
2001c; 2001b). The authors analyzed auctions
strategically, whereeach agent’s strategy included
both computingand bidding. They found that for
certain auctions, properties such as incentive compatibility cease to holdif agents explicitly deliberate to determinevaluations. Instead agents strategize and counterspeculate, sometimesusing computing to (partially) determine opponents’ valuations. It was conjectured that such strategic computing maylead to inefficient outcomes.
In this paper we introduce a way of measuring the negative impact of agents choosing computing strategies selfishly. Our miscomputingratio isolates the effect of selfish computingfrom
that of selfish bidding. Weshowthat under both
limited computingaffd costly computing,the outcomecan be arbitrarily far worse than in the case
where computations are coordinated. However,under reasonable assumptions on howlimited computing changes valuations, boundscan be obtained.
Finally, we showthat by carefully designing computing cost functions, it is possible to provide appropriate incentives for bidders to choosecomputing policies that result in the optimalsocial welfare.
The paper is organized as follows. The next section describes the auction modeland deliberation
model. The following section discusses whyPareto
efficiency is not necessarily a goodwayof measuring the impact of restricted computingon the outcomeof the auction. This is followed by the introduction of our miscomputingratio, and the results
we derive for it. Weconclude with related work
and a summaryof the paper.
Auctionsare useful mechanism
for allocating items
(goods,tasks, resources,etc.) in multiagentsystems. Thebulk of auction theory assumesthat the
bidders’valuationsfor itemsare givena priori. In
manyapplications, however,the bidders need to
expendsignificant effort to determinetheir valuations. In this paperweanalyzecomputational
bidder agentsthat canrefine their valuations(ownand
others’) using computation.Weintroducea wayof
measuringthe negativeimpactof agents choosing
computingstrategies selfishly. Ourmiscomputin
8
ratio isolates the effect of selfish computing
from
that of selfish bidding. Weshowthat underboth
limited computingand costly computing,the outcomecan be arbitrarily far worsethan in the case
wherecomputationsare coordinated.However,
under reasonable assumptionson howlimited computingchangesvaluations,boundscanbe obtained.
Finally, weshowthat by carefully designingcomputingcost functions,it is possibleto provideappropriateincentivesfor biddersto choosecomputingpoliciesthat result in the optimalsocialwelfare.
Introduction
Auctions are useful mechanismsfor allocating
items (goods, tasks, resources, etc.) in multiagent
systems. The bulk of auction theory assumes that
the bidders’ valuations for items are given a prior/. In manyapplications, however, the bidders
need to expendsignificant effort to determinetheir
valuations. This is the case, for example,whenthe
bidders can gather information (Perisco 2000)
whenthe bidders have the pertinent information in
hand, but evaluating it is complex.Thereare a host
of applicationsof the latter that are closely related
to computerscience and AI questions. For example, whena carrier companybids for a transportation task, evaluating the task requires solving the
carrier’s intractable vehicle routing problem(Sandholm 1993). As another example, when a subcontractor bids for a manufacturingjob, evaluating it
The Model
In this section we specify our model. Wefirst review game-theoretic solution concepts, then auctions, and finally present the modelof deliberation
control.
Copyright~) 2002,American
Associationfor Artificial
Intelligence (wwwmaai,org). All rights reserved.
44
Concepts from Game Theory
A gamehas a set of agents and a set of outcomes
O. Each agent has a set of strategies from which
it choosesa strategy to use. Astrategy is a contingency plan that determines what action the agent
will take at any given point in the game.A strategy profile, s = (sl,..., Sn), is a vector specifying one strategy for each player i in the game.
Weuse the notation 8 = (si, s-i) to denote
strategy profile whereagent/’s strategy is si and
s-i = (sl,..., si-x, Si+l,. ¯ ¯, Sn). Thestrategies
in the profile determinehowthe gameis played out,
and thus determine the outcome o(s) E O. Each
agent i tries to chooseits strategy, si, to as to maximizeits utility, whichis givenby a utility function
ui:O~
Noncooperative game theory is interested in
finding stable points in the space of strategy profiles. Thesestable points are the equilibria of the
game. There are manytypes of equilibria but in
this paper we focus on the two most common
ones:
dominantstrategy equilibria and Nashequilibria.
A strategy is said to be dominantif it is a player’s
strictly best strategy against any strategies that the
other agents mightplay.
) > ~i(O(8~,S--i)).
The strategy is weaklydominantif the inequality is
notstrict.
If each agent’s strategy in a strategy profile is the
agent’s dominantstrategy, then the strategy profile
is a dominantstrategy equilibrium.
Agents maynot always have dominantstrategies
and so dominantstrategy equilibria do not always
exist. Instead a different notion of equilibrium is
often used, that of the Nashequilibrium.
Definition 2 A strategy profile s* is a Nashequilibrium if no agent has incentive to deviate fromhis
strategy given that the other players do not deviate.
Formally,
vi u Co(sL
Another measure that is commonlyused is social welfare. It often allows prioritizing one Pareto
efficient outcomeover another, but it does require
cardinal utility comparisonacross agents.
Definition 4 The social welfare of outcomeo E 0
is SW(o)= Y’~i ui(o)Equilibrium play does not always optimize social welfare. A classic exampleof this is the Prisoner’s Dilemmagame.
The definitions given above were for general
utility functions. However,
in this paper, as is standard whendiscussing auctions, we assumethat the
agents’ utility functions are quasi-linear. That is,
the utility of agent i, ui, is of the formui =vi - Pi
where vi is the amountthat the agent values the
item up for auction and Pi is the amountthat it pays
for the item. If agent i does not win the auction,
then ui = O.
Auctions
In this paper we consider auctions where one good
is being sold. There are numerousauction mechanisms, but in this paper we focus on the Vickrey
auction. In a Vickrey auction (aka. second-price
sealed-bid auction), one good is being sold, each
bidder can submit one sealed bid, the highest bidder wins, but only pays the price of the secondhighest bid. The desirable feature of this mechanism is that if a bidder knowsits private valuation
for the good, the bidder’s (weakly) dominantstrategy is to bid that valuation(rather than strategically
under- or over-bidding). Wechose to study the
Vickreyauction because it has this desirable property in the classic literature, but ceases to havethis
property whenthe bidder agents do not knowtheir
ownvaluations, but rather havethe option of investing computation to determine them. In our model,
the agent’s valuations are independentof each other
as in most of the literature, but wedeviate in that
our agents do not knowtheir ownvaluation a pr/ori.
Definition 1 Agent i’s strategy s~ is a dominant
strategy if
VS-- i V8~ ~ 8~ ~li(O(8*,S--i)
agent has higherutility in o’ than in o, andno agent
has lower utility. Formally,~b’ s.t. ~/i,ui(o’)
ui(o) and 3i ui(o’) > ui(o)].
>
The Nashequilibrium is strict if the inequality is
strict for eachagent.
Normative Model of Deliberation
In this paper, whenever we measure outcomes,
we measurethem from the perspective of the bidders in the auction, not caring about the auctioneer (who is not a strategic agent in our model).
One commonmeasure for comparing outcomes is
Pareto efficiency. It is a desirable measurein the
sense that it does not require cardinal utility comparisons across agents.
Definition 3 An outcomeo is Pareto efficient if
there exists no other outcomeo’ such that some
In order to participate in an auction, agents need
to be able to have a valuation for the items being sold. The question is: Howare these valuations obtained? In this paper we focus on settings
where agents do not simply knowtheir ownvaluations. Rather they have to allocate computational
resources to computethe valuations.
If agents knowtheir ownvaluations (or are able
to determine them with ease) they can execute the
equilibrium bidding strategies for rational agents.
45
movethe agent from parent to child in the tree.
The performanceprofile trees provide information
about howthe solution is likely to improve with
future computation. In particular, if an agent has
reached a solution corresponding to a node in the
tree, then the agent need only consider solutions
in the subtree rooted at the node. The probability of obtaining a solution v’, given that the agent
has reached a node with solution v, is equal to the
product of the probabilities of the edges connecting
nodewith solution v to v’.
There are two different types of performance
profiles: stochastic and deterministic. A stochastic
performanceprofile modelsuncertainty as to what
results future computingwill bring. At least one
node in the tree has multiple children. The uncertainty can come from variation in performance on
different probleminstances or from the use of randomizedalgorithms. A deterministic performance
profile is the special case wherethe algorithm’sperformancecan be projected with certainty (i.e., the
tree is a branch). Witha deterministic performance
profile, an agent can determine what the solution
will be after any numberof computingsteps devoted to the problem---before the agent conducts
any computation. Even though the agent knows
what solution it can obtain, it must still compute
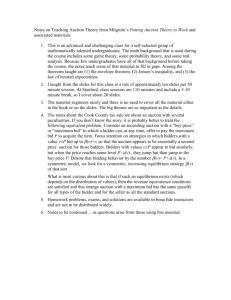
in order to obtain it. Figure 1 is an exampleof a
stochastic performanceprofile tree.
However,agents often haverestrictions on their capabilities for determiningthe valuations. In this paper we are interested in settings whereagents have
to computeto determinevaluations. Settings where
the value of an item dependson howit is used often has this property. For example,valuation determination mayinvolve solving optimization problems that provide a solution as to howthe items in
the auction can be used once obtained. However,
manyoptimization problems, such as scheduling,
are NP-complete.It maynot be feasible to optimally solve the valuation problems. Instead, some
form of approximation must be used. In this paper we assumethat agents have anytime algorithms
(Boddy& Dean1994). The defining property of
anytimealgorithm is that it can be stopped at any
point in time to provide a solution to the problem,
and the quality of the solution improves as more
time is allocated to the problem. This allows a
tradeoff to be madebetween solution quality and
time spent on computing. Since the amountof time
an agent can use to computevaluations is limited
by deadlines or cost, the agents must maketradeoffs in howto determine their valuations. Alone,
anytimealgorithms do not provide a completesolution. Instead, they are paired with a meta-levelcontrol procedure that determines howlong to run an
anytime algorithm, and whento stop and act with
the solution obtained. In this paper we assumethat
agents have a meta-level control procedure in the
form of performance profile trees, based on work
in (Larson &Sandholm200 la).
There is a performanceprofile tree for each valuation problem(one valuation problemper agent).
Figure 1 presents one such tree. The trees are obtained from statistics collected from previous runs
of an algorithm on the valuation problem.The tree
describes howdeliberation (computation) changes
the solution to the valuation problem. Each agent
uses this informationto decide howto allocate its
computingresources at each step in the process,
basedon results of its computingso far.
The trees capture uncertainty that stems from
both randomizedalgorithms and variation of performance on different problem instances. There
are two different types of nodes in the performance
profile tree, solution nodes and randomnodes.
Eachsolution node stores the solution that the algorithm has computedgiven a certain amount of
computation so far. Randomnodes occur whenever
a randomnumberis used to chart the path of the algorithm run. The edges in the tree are labeled with
the probability that after one morestep of computation, the solution returned will be the node found
by following the edge.
Agentsuse the performanceprofile trees to help
in makingdecisions about howto use their computational resources. As agents allocate computational time to an algorithm, the solutions returned
O0
7.O
Figure 1: An agent’s stochastic performanceprofile
tree for a valuation problera~ The diamondshaped
nodes are randomnodes and the round nodes are
solution nodes. At randomnode A, the probability that the randomnumberwill be 0 is P(O), and
the probability that the randomnumberwill be I is
P(1). AT solution node 17,, the edges are labeled
with the probability of reaching each child, given
that node E was reached.
The performanceprofile tree is a fully normative
modelfor deliberation control whichis required for
gametheoretic analysis. It also allows optimal conditioning on manyparameters, including results of
executionso far and on the actual probleminstance.
In the rest of the paper we makethe assumption
that all performance profiles are commonknowledge. This means, that all agents knowwhat all
performanceprofiles look like, and they knowthat
all the agents know.Agentsare allowed to compute
on each others’ problems. Wedo not assume that
agents knowhow their opponents are computing.
46
Strategic
Computing and Bidding
Weconsider two models of computing. In one of
them, computingis free, but there is a deadline for
each agent whenthat agent has to stop computing.
In the other model, the computations do not have
deadlines, but each agent has to pay for the cycles
it consumes. Let T be the time whenthe auction
closes. After that the agent cannot bid or compute valuations. In the modelof limited computing,
each agent has T free computingcycles to use. In
the modelof costly computing,each agent can consumeas manycycles per real-time unit as it wants,
but has to pay a computingcost ca(.).
At every step of the game, each agent can take
a computingaction (the agent can also skip taking a computingaction). Taking a computingaction means allocating one step of computing on
one’s ownvaluation problemor on one of the other
agents’ valuations problems(so as to obtain information about their valuations, which the agent can
use to bid morestrategically to benefit itself). We
say that an agent uses strong strategic computingif
it allocates someof its computingcycles on others’
valuation problems.
At the deadline T, each agent submits one sealed
bid to the Vickreyauction. This bid is the agent’s
bidding strategy. The amount an agent bids dependson the solutions it has obtained for its (and
others’) valuation problemsthrough computing.
It has been shownin earlier workthat the model
of computing(costly or limited) has a significant
impact on what strategies agents mayuse:
Theorem1 Assumethat agents have free but limited computing. Then, in a Vickrey auction, the
bidders have (weakly) dominantstrategies where
they only computeon their own valuation problems
( Larson &Sandholm2001b).
Cost of Selfish
Definition 5 Let o* be the outcomethat is reached
if the global controller dictates computingpolicies
to all agents, andagents are free to bid in the Vickrey auction.
Onthe other extreme, we are interested in what
happens whenagents are free to choose to follow
any computing and bidding strategy. Let NashEq
be the set of Nash equilibria in that game.Wenow
define what is meantby the worst-case Nashequilibrium.
Definition 6 The worst case Nash equilibrium is
NE=
Theorem2 Assumethat agents have unlimited but
costly computing. Then, in a Vickrey auction,
strong strategic computation can occur in strict
Nash equilibrium (Larson & Sandholm2001c).
The Social
right measureto use in the context of computationally boundedagents. Is there an alternative measure?
Instead of looking at efficiency, we propose to
use social welfare as the measure. Wewant to know
howletting agents freely choose their owncomputing strategies impacts the social welfare of the set
of all bidders. In particular, we comparethe highest achievable social welfare to the lowest social
welfare achievable in any Nashequilibrium.
Whenwe determine the highest achievable social welfare we optimistically assumethat there is
a global controller whoimposeseach agent’s computing strategy (so as to maximizesocial welfare).
Thecontroller has full informationabout all performanceprofiles, deadlines, cost functions, and intermediate results of computing,and given this information, specifies exactly howeach agent must use
its computational resources. In the bidding stage
agents are free to bid as they wish, but their goal is
still to maximizetheir ownutility, and so they bid
truthfully in the Vickreyauction, given the valuations they have obtained under the enforced computing policy.
ars~la~hEqill
SW(o(8)).
Weuse the following ratio to see howmuchletting agents choose their owncomputingstrategies
reduces the social welfare.
Definition 7 The miscomputingratio is
Computing
R - SW(o*)
SW(o(NE))
Now,a natural question to ask is whetherthe cost
or limit on computingresources results in a loss
of efficiency. However,efficiency is hard to compare in such settings. The Vickreyauction is efficient in the sense that it alwaysallocates the item to
the bidder with the highest valuation. However,an
agent whomight have been able to obtain the highest valuation via computing,mayhaveused its limited computingon a different problem,thus causing
a different agent to have the highest valuation and
win the auction. This comeis still efficient given
how agents computed, but it overlooks the computational issues in an unsatisfying way. This suggests that Pareto efficiency maynot always be the
This ratio isolates the impact of selfish computing from the traditional strategic bidding behavior
in auctions. This is becausein both the coordinated
and uncoordinated scenario, the agents bid based
on self-interest.
Results
In this next section we present our results in terms
of the miscomputingratio. The first subsection
discusses the general case with limited computing.
The next subsection studies howthe ratio can be
improved when the analyzer has more knowledge.
47
The following subsection studies the general case
with costly computing.The final subsection shows
howthe costs can be adjusted to increase social
welfare.
then the ratio will not be unbounded. Let k be
the difference between the highest possible computed valuation and the second highest possible
computedvaluation. That is
1 max vj (T)]
k = min[max max vi(T) - max
i vi(T)
j~i v~ (T)
General Case with Limited Computing
It turns out that with limited computing,the miscomputingratio can be arbitrarily bad.
Proposition 1 Assume there are n bidders in a
lrtckrey auction, each bidder has free but limited
computing,and the auction closes at time T. Then,
the miscomputing
ratio R can be infinity.
Proof: Assumethat all agents have deterministic
performance profiles. Each agent has a dominant
strategy whichis to deliberate only on its ownvaluation problemuntil the deadline and to submit a
bid equal to the valuation that it has obtained. That
is, agent i submits a bid of vi(T). Withoutloss of
generality, assumethat vt (T) > v2 (T) > vj (T)
for all j ~ 1, 2. In equilibrium, agent 1 will win
the auction and pay an amountof v2 (T). Therefore, agent l’s utility is Ul = Vl (T) - v2 (T).
Ul = e. The utility for all other agents is ui = 0
for i ~ 1. Therefore,
under the constraint that vi(T) > vj(T).
amountk is equal to the lowest possible social welfare obtainable if agents computein a selfish manner. If guarantees on the size of k can be madeby
the restriction of performanceprofile trees then the
miscomputingratio can be madefinite.
Proposition 2 Let
k = min[maxmaxvi(T)
i vi(T)
- max max v~(T)]
j¢i vj(T)
for all i,j and all possible values of vi(T) and
vj(T) under the constraint that vi(T) vj(T).
Thenthe miscomputingratio is
R< maxi max
k vi (T)
General Case with Costly Computing
B
If agents have costly unlimited computing, then
they no longer necessarily have dominantstrategies in the Vickrey auction (see Theorem2). Instead, what they do dependson what strategies the
other agents choose. Whenplacing bids, agents
no longer directly bid the valuation that they have
computed.Instead, they shave the bids downwards.
By constructing appropriate cost functions, it
turns out to be possible to emulate the situation
where agents have free computingbut are limited
by deadlines. Thereforeit is not surprising that under certain circumstances the ratio of the maximum
social welfare to the social welfare obtained from
the worst Nash equilibrium can be unbounded.
SW(o(NE)) = ~ uj
j----1
In order to maximizesocial welfare, the global
controller would prohibit all agents expect for
agent 1 to deliberate. Agent 1 would compute
on its valuation problemuntil time T and submit
a bid of Vl (T) while all other agents wouldsubmit a bid of 0. Agent 1 would win the item and
pay an amountof 0. The utility for agent 1 is
Ux = vl(T) - 0 = Vl(T), while ui = 0 for all
i ¢ 1. Therefore
B
SW(o’)= v, .
Proposition 3 Consider a Vickrey auction with n
bidders. Assumethat each bidder i has costly, unlimited computing. Then, the miscomputing ratio
R can be infinity.
j=l
Theratio, R, is
R= SW(o*) = vl(T)
SW(o(NE))
As e -+ 0 (that is, as the difference betweenthe
highest and second highest valuations decreases),
R-r eo.
[7
This is a negative result. Allowingagents to
choosetheir computingstrategies leads to an outcomethat can be arbitrarily far fromoptimal.
Proof: Assumethat each agent i has the following
cost function,ca (t);
ca(t)
l" 0 ift
oo ift
/
< T;
>T.
Eachagent has a dominantstrategy which is to deliberate only on is ownvaluation problemuntil time
T and then submit a bid of vi(T). That is, each
agent behaves as though they have free but limited computingresources with a deadline at time
T. Like in the proof for the free but limited agents,
Bounding the Miscomputing Ratio Under
Limited Computing
However,in manysituations the miscomputingratio will not be unbounded.Even if the performance
profiles are stochastic, as long as the difference betweenthe highest computedvaluation and the second highest computedvaluation is "large enough",
tlf the performance
profiles are stochasticthere may
be multiple valuations that couldbe computed
for each
agent.
48
compute
assumethat the difference betweenthe highest and
secondhighest bids is e and, without loss of generality, assumethat the highest valuation is vl (T).
Then
compute
no
[]
Adjusting the Computing Cost to Increase
Social Welfare
Prior literature has shownthat in Vickreyauctions,
computationally limited agents have no incentive
to use strong strategic computing(i.e., they do
not counterspeculate each other) while agents with
costly computing do (Larson & Sandholm2001c).
This suggests that if there is a systemdesigner who
can control howthe agents’ computationalcapabilities are restricted, the designer should rather impose limits than costs.
However,it turns out that computingcosts can
be adjusted so that the optimal miscomputingratio
(R = 1) is reached. This wouldmeanthat charging
for computingis at least as desirable as imposing
limits.
0, v2(T)-
vl (T)- c,
0,0
vl (T) -
In this examplethe constant c can be madearbitrarily close to zero. Therefore, the maximum
social welfare generated by the global controller in
the costly computingsetting and be madearbitrarily close to the maximum
social welfare obtainable
if computingresources are free.
[]
Related Research
In auctions, computational limitations have been
discussed both as they pertain to bidding agents
and as they pertain to running the auction (the
mechanism).For bounded-rational bidding agents,
Sandholmnoted that under a modelof costly computing, the dominantstrategy property of Vickrey
auctions fails to hold (Sandholm2000). Instead,
an agent’s best computing action can depend on
the other agents. In recent work, auction settings
where agents have hard valuation problems have
been studied (Larson & Sandholm2001c; 2001b;
Parkes 1999). Parkes presented auction design as
a wayto simplify the meta-deliberation problems
of the agent, with the goal of providing incentives for the "right" agents to deliberate for the
"right" amount of time (Parkes 1999). Recently
Larson and Sandholm have been working on incorporating computingactions into agents’ bidding
strategies using a normativemodelof deliberation
control and have focused on equilibrium analysis of different auction settings underdifferent deliberation limitations (Larson &Sandholm2001b;
2001c). While we borrow the deliberation model
from Larson and Sandholm,this paper addresses a
different question from previous work. They investigate the impact of restricted computingcapabilities on agents’ strategies, we look, instead, at what
the impactis at a system-widelevel, present a measure for comparingoverhead in different settings,
and ask if it is possible to place certain bounds
on the overhead added by having resource-bounded
agents.
Proof: Consider the following example. Let there
be 2 agents, agent 1 and agent 2, each with a deterministic performanceprofile. Assumethat both
agents have free but limited computingresources.
Eachagent has a dominantstrategy, whichis to deliberate on their ownproblemand submit a bid of
vi (T). Assumethat vl (T) > v2 (T). The equilibrium outcomeis to award the item to agent 1 and
have agent 1 pay an amountv2 (T). Agentl’s utility is then ul = vl(T) - v2(T) while agent 2’s
utility is u2 = 0. To maximizesocial welfare the
global controller wouldforbid agent 2 to deliberate,
and thus agent 1 could get the item and need not
pay anything. The maximum
social welfare would
be ul = Vl (T). Therefore
vl(T)
vl (T) - v2(T)
Next, consider the case wherea simple cost function is introduced. Define
ca(t) =
no
-c
R-vx(T)-c-1.
Proposition 4 Computing cost functions can be
used to motivate bidders to choosestrategies that
maximizesocial welfare.
R ----
v2(T),
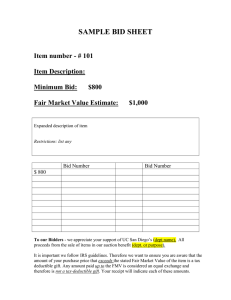
Table 1: Normal form game. Agent 1 is the row
player and agent 2 is the column player. Each
agent wouldsubmit a bid that is equal to its computed valuation minusthe cost spent to obtain the
valuation.
or not to computeat all. The gamecan be represented in normalform in Table 1.
The sole Nashequilibrium is for agent 1 to compute and submit a bid ofvl (T)-c and for agent 2
not compute. The global controller trying to maximize the social welfare wouldforce each agent to
also follow those strategies. Therefore
R- vl(T)
and as e -~ O, R -~ oo.
’V1 (T)
cift<T;
co if t > T;
for some constant c, 0 < c < v2(T) < vl(T).
Anystrategy that involves deliberating on the other
agent’s valuation problemis dominatedas the computing action incur a cost without improving the
agent’s overall utility. Thus, the remainingstrategies are for the agents to computeonly on their own
valuation problemuntil the cost becomestoo high,
49
There has also been recent workon computationally limited mechanisms.
In particular, research has
focused on the generalized Vickreyauction and has
investigated ways of introducing approximatealgorithms or using heuristics to computeoutcomes
without loosing incentive compatibility (Nisan
Ronen 2000; Kfir-Dahav, Monderer, & Tennenholtz 2000). Our workis different in that it is focused on settings where the agents are computationally limited.
Koutsoupias and Papadimitriou (Koutsoupias
Papadimitriou 1999) first proposed the concept of
worst-case Nash equilibrium. This has been called
the price of anarchy (Papadimitriou 2001). They
focused on a network setting where agents must
decide howmuch traffic to send along paths in
the network. The agents did not have computational limitations. Roughgardenand Tardos studied a different modelof networkrouting using the
same measure as Koutsoupias and Papadimitriou
and obtained tight bounds as to howfar from the
optimal outcomethe agents wouldbe, if allowed to
send traffic as they wished (Roughgarden&Tardos
2000).
Conclusions
Auctionsare useful mechanism
for allocating items
(goods, tasks, resources, etc.) in multiagent systems. The bulk of auction theory assumesthat the
bidders’ valuations for items are given a priori. In
manyapplications, however, the bidders need to
expendsignificant effort to determinetheir valuations. In this paper we studied computationalbidder agents that can refine their valuations (ownand
others’) using computation. Weborroweda normative modelof deliberation control for this purpose.
Wefocused on the Vickrey auction where bidding truthfully is a dominantstrategy in the classical model.It wasrecently shownthat this is not the
case for computationallyrestricted agents. In this
paper we introduced a way of measuring the negative impact of agents choosing computingstrategies selfishly. Our miscomputingratio compares
the social welfare obtainable if a global controller
enforces computingpolicies designed to maximize
social welfare (but does not imposebidding strategies), to the social welfare that is obtained in the
worst Nashequilibrium. This measureisolates the
effect of selfish computingfromthat of selfish bidding.
Weshowed that under both limited computing
and costly computing,the outcomecan be arbitrarily far worse than in the case wherecomputations
are coordinated. However, under reasonable assumptions on howlimited computingchanges valuations, boundscan be obtained. Finally, we showed
that by carefully designing computingcost functions, it is possible to provide appropriate incentives for bidders to choosecomputingpolicies that
result in the optimal social welfare. This suggests
(unlike earlier results) that, if there is a systemdesigner that can choosehowto restrict the agents’
computing, imposing costs instead of limits may
be the fight approach.
Ackowledgments
This material is based upon work supported by
the National Science Foundation under CAREER
Award1RI-9703122, Grant IIS-9800994, and ITR
IIS-0081246.
References
Boddy, M., and Dean, T. 1994. Deliberation scheduling for problem solving in timeconstrained environments.Artificial Intelligence
67:245-285.
Kfir-Dahav, N.; Monderer, D.; and Tennenholtz,
M. 2000. Mechanism design for resource
bounded agents. In Proceedings ICMAS-2000.
Koutsoupias, E., and Papadimitriou, C. 1999.
Worst-case equilibria. In Symposiumon Theoretical Aspects in ComputerScience.
Larson, K., and Sandholm, T. 2001a. Bargaining with limited computation: Deliberation equilibrium. Artificial Intelligence 132(2):183-217.
Larson, K., and Sandholm, T. 200lb. Computationally limited agents in auctions. In AGENTS-01
Workshopof Agents for B2B, 27-34.
Larson, K., and Sandholm,T. 2001c. Costly valuation computationin auctions. In TARKVIII, 169182.
Nisan, N., and Ronen, A. 2000. Computationally
feasible VCGmechanisms.In Proceedings of the
ACMConference on Electronic Commerce,242252.
Papadimitriou, C. 2001. Algorithms, games and
the Internet. In Proceedings of the 33rd Annual
ACMSymposium on the Theory of Computing,
749-253.
Parkes, D.C. 1999. Optimal auction design
for agents with hard valuation problems. In
Agent-Mediated Electronic CommerceWorkshop,
IJCAI-99.
Perisco, N. 2000. Informationacquisition in auctions. Econometrica68(1):135-148.
Roughgarden,T., and Tardos, 1~. 2000. Howbad
is selfish routing? In Proceedingsof the 41st Annual IEEE Symposium on Foundations of Computer Science.
Sandholm, T. 1993. An implementation of the
contract net protocol based on marginal cost calculations. In AAAI-1993,256-262.
Sandholm,T. 2000. Issues in computationalVickrey auctions. International Journal of Electronic
Commerce4(3): 107-129.
50