A second study describes the development of a genetic oscillator based... combination of positive and negative feedback:
advertisement

A second study describes the development of a genetic oscillator based on the
combination of positive and negative feedback:
M. R. Atkinson, M. A. Savageau, J. T. Myers, and A. J. Ninfa. Cell 113, 597-607
(2003)
In this lecture we will derive the stability diagram in Fig. 1B. In the model odd
subscripts are used for mRNA whereas even subscripts are used for proteins. For
example, the translation of mRNA is modeled as:
dX 2
= k p X1 − β2 X 2
dt
[VII.17]
where kp is the translation rate constant and β2 is the decay rate constant of the protein X2.
When X2 and X1 are normalized to their steady state values: X 2ss =
kp
β2
X 1ss , [VII.7] takes
the form:
dx2
= β 2 ( x1 − x2 )
dt
[VII.18]
Analogously the system of equations describing the genetic circuit in Fig.1A is:
dx1
dt
dx2
dt
dx3
dt
dx4
dt
dx5
dt
dx6
dt
= β1 ( f1 − x1 )
= β 2 ( x1 − x2 )
= β 3 ( f 3 − x3 )
= β 4 ( x3 − x4 )
[VII.19]
= β 5 ( f 5 − x5 )
= β 6 ( x5 − x6 )
The functions f1, f3, and f5 describe the transcriptional regulation and are defined by triphasic functions. For the stability analysis only the first four equations are relevant since
no feedback occurs after x4. As described in the Supplementary information of the paper:
39
7.81/8.591/9.531 Systems Biology – A. van Oudenaarden – MIT– October 2004
B : x2g12 x4g14 < B
f1 = x2g12 x4g14 : B < x2g12 x4g14 < M
M : x g12 x g14 > M
2
4
[VII.20a]
B : x2g 32 < B
f 3 = x2g 32 : B < x2g 32 < M
M : x g 32 > M
2
[VII.20b]
In the case of a single fixed point, this point occurs at x1=x2=x3=x4=1. The matrix A is
now defined as:
− β1
β
A= 2
0
0
β1 g12
0
β1 g14
− β2
0
0
β 3 g32 − β 3
0
0
β4 − β4
[VII.21]
The eigenvalues of this matrix are found by solving:
− β1 − λ
β2
0
0
0
β1 g12
β1 g14
− β2 − λ
0
0
=0
0
β 3 g 32 − β 3 − λ
0
− β4 − λ
β4
[VII.22]
This leads to the characteristic equation in the form:
ao λ4 + a1λ3 + a2λ2 + a3λ + a4 = 0
ao = 1
a1 = β1 + β 2 + β 3 + β 4
a2 = β1β 2 (1 − g12 ) + β1β 3 + β1β 4 + β 2 β 3 + β 2 β 4 + β 3 β 4
[VII.23]
a3 = β1β 2 β 3 (1 − g12 ) + β1β 2 β 4 (1 − g12 ) + β 2 β 3 β 4 + β1β 3 β 4
a4 = β1β 2 β 3 β 4 (1 − g14 g 32 − g12 )
Solving for the λ’s is difficult. However there is a convenient mathematical condition,
called the Routh-Hurwitz criterion that allows you to determine the stability without
explicitly calculating the eigenvalues. The Routh-Hurwitz criterion states that a system is
stable (real part of all eigenvalues is negative) if all coefficients [VII.23] are positive and
all elements in the first column of the Routh-Hurwitz matrix are positive. This matrix is
constructed as follows:
40
7.81/8.591/9.531 Systems Biology – A. van Oudenaarden – MIT– October 2004
The matrix has n+1 (in our case 5) rows:
λn
λn −1
λn − 2
λn − 3
λn − 4
ao
a2
a4
a6 L
a1
a3
a5
a7 L
b1
b2
b3
b4
L
c1
c2
c3
c4
L
d1
d2
d3
d4 L
M
M
M
M
M
[VII.24]
λ1 f1
λ0 g1
where
b1 =
a1a2 − a0 a3
a a − a0 a5
a a − a0 a7
, b2 = 1 4
, b3 = 1 6
a1
a1
a1
c1 =
b1a3 − a1b2
ba −ab
ba −ab
, c2 = 1 5 1 3 , c3 = 1 7 1 4
b1
b1
b1
d1 =
c1b2 − b1c2
cb −bc
, d2 = 1 3 1 3
c1
c1
[VII.25]
The Routh-Hurwitz stability criterion states that the number of roots with positive real
parts is equal to the number of sign changes of coefficients in the first column of the
matrix. Let’s apply this criterion to our problem. First we have to make sure that all
coefficient ai are positive. ao and a1 are always positive, a4 is positive if:
g14 g 32 < 1 − g12
[VII.26]
This is the line with the negative slope in the stability diagram (Fig. 1B). a2 is positive if:
β1β 2 + β1β 3 + β1β 4 + β 2 β 3 + β 2 β 4 + β 3 β 4 > g12 β1β 2
[VII.27]
If β1≈β3 and β2≈β4 this is satisfied when g12 < 4. Similarly, a3 is positive if
β1β 2 β 3 + β1β 2 β 4 + β 2 β 3 β 4 + β1β 3 β 4 > g12 (β1β 2 β 3 + β1β 2 β 4 )
[VII.28]
If β1≈β3 and β2≈β4 this is satisfied when g12 < 2. Therefore the conditions for positive ai
are:
g14 g 32 < 1 − g12
g12 < 2
[VII.29]
The next step is to calculate b1, c1, and d1. Substitution in [VII.25] yields d1=b2=a4>0
because of [VII.26]. b1 >0 is equivalent to:
41
7.81/8.591/9.531 Systems Biology – A. van Oudenaarden – MIT– October 2004
∑β β
i≠ j
i
j
−
∑β β β
∑β
i≠ j≠k
i
j
k
> g12 β1β 2 +
g12 (β1β 2 β 4 + β1β 2 β 3 )
∑β
i
i
[VII.30]
i
i
Rewriting gives:
2
∑β β β + ∑β
i≠ j≠k
i
j
k
i≠ j
2
i
β j > g12 β1β 2 ∑ β i + g12 (β1β 2 β 4 + β1β 2 β 3 )
[VII.31]
i
The first term is larger than the last term in [VII.31] cancel if g12<4 which is already
satisfied by [VII.29]. The remaining is:
∑β
i≠ j
2
i
β j > g12 β1β 2 ∑ β i
[VII.32]
i
The left sum has in total 12 terms whereas the right has four. So as long as g12<3, b1>0.
The last condition to prove is: c1>0.
c1 = a3 −
a12 a4
a1a4
= a3 −
>0
a1a2 − a3
b1
[VII.33]
Substitution of [VII.25] gives:
g14 g 32 < 1 − g12 +
[
1
a1a2 a3 − a32
2
β1β 2 β 3 β 4 (β1 + β 2 + β 3 + β 4 )
]
[VII.34]
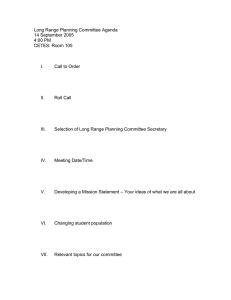
The easiest way to solve this is graphically. The values for the degradation constants are:
β1 = β3 = β5 = 20.8 + 0.696/td hr-1 and β2 = β4 = β6 = 0.696/td hr-1. Figure 12 shows the
stability region (also see MATLAB code 6).
MATLAB code 6: Routh-Hurwitz criterion:
clear;
close;
g1=0:0.1:4;
t_D=0.5;
b1=20.8+0.696/t_D;
b2=0.696/t_D;
b3=20.8+0.696/t_D;
b4=0.696/t_D;
a0=1;
a1=(b1+b2+b3+b4);
a2=(b1*b2+b1*b3+b1*b4+b2*b3+b2*b4+b3*b4)-g1*b1*b2;
a3=b1*b2*b3+b1*b2*b4+b2*b3*b4+b1*b3*b4-g1*b1*b2*b3-g1*b1*b2*b4;
y1=1-(a1*a2.*a3-a3.*a3)./(a1*a1*b1*b2*b3*b4);
y2=1-g1;
plot(g1,y1,'b',g1,y2,'r');
axis([0 4 -20 2]);
grid on;
xlabel('g12');
ylabel('g14g32');
42
7.81/8.591/9.531 Systems Biology – A. van Oudenaarden – MIT– October 2004
Figure 12. Stability analysis of synthetic oscillator of Atkinson et al.
43
7.81/8.591/9.531 Systems Biology – A. van Oudenaarden – MIT– October 2004