22.615, MHD Theory of Fusion Systems Prof. Freidberg
advertisement

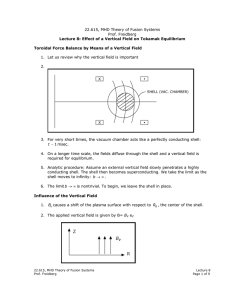
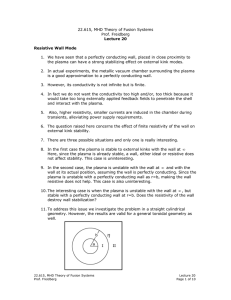
22.615, MHD Theory of Fusion Systems Prof. Freidberg Lecture 21 Toroidal Tokamak Stability 1. n=0 axisymmetric stability 2. Merceir criterion 3. Ballooning modes several region of stability 4. External kink modes 5. Numerical results (Trogon limit, Sykes limit) General Comments 1. Toroidal tokamaks quite complicated 2. Equilibria must in general be computed numerically 3. Special high β equilibria calculated in class-unstable because of current jump at the boundary 4. Stability-only Fourier analyze with respect to φ ξ = (r, θ, φ ) = ξ (r, θ ) e−ιπφ 5. Stability equations: 2-D partial differential equations, coefficients function of 2-D equilibria n=0 axisymmetric modes 1. By symmetry these modes are neutrally stable in the straight case δW ( Λ = 1) W0 n=0 = 2 q2a ( m − 1) = 0 for m = 1 22.615, MHD Theory of Fusion Systems Prof. Freidberg Lecture 21 Page 1 of 10 2. In a torus we must distinguish vertical from horizontal modes 3. Vertical usually the worst case 4. Simple electrical engineering model a. plasma treated as a wire with perfect conductivity b. neglect plasma pressure, internal magnetic field, diamagnetism c. assume wire is embedded in an external magnetic field d. perfect conductivity requires flux within current ring remain constant during the perturbation e. goal: calculate shape of the vertical field for stability 5. Pure vertical field is neutral by symmetry 6. Classical mechanics formulation a. Force acting on plasma: F (R, Z) = −∇φ b. Equilibrium: FR (R 0 , Z0 ) = FZ (R0 , Z0 ) = 0 22.615, MHD Theory of Fusion Systems Prof. Freidberg Lecture 21 Page 2 of 10 Determines equilibrium position R 0 , Z0 where F = 0 ∂FZ ∂FR (R 0 , Z0 ) < 0 (R 0 , Z0 ) < 0 ∂Z ∂R vertical stability horizontal stability c. Stability: d. Restoring force is opposite to displacement Formulation 1 2 LI 2 1. Potential Energy: φ = ⎡ ⎛ 8R ⎞ ⎤ L = L (R ) = μ0R ⎢ln ⎜ ⎟ − 2⎥ a ⎠ ⎣ ⎝ ⎦ 2. Flux linked by plasma: ψ = LI − 2π ∫ R 0 ( ) BZ R' , Z R'dR ' = const. Vertical field 3. Equilibrium: FR = FZ = 0 FZ = − ∂φ ∂I = −LI ∂Z ∂Z FR = − 4. Constraint: ψ = const. → a. ∂ψ ∂I = 0 →L − 2π ∂Z ∂Z ∫ R 0 ∂φ ∂I I2 ∂I = −LI − ∂R ∂R 2 ∂R ∂ψ ∂ψ = =0 ∂R ∂Z ∂BZ ' ' R dR ∂Z − 0=L b. 1 ∂R ' R ' ∂R ' BR ∂I + 2πRBR ∂Z ∂ψ ∂I ∂I = 0 →L +I − 2πRBZ = 0 ∂R ∂R ∂R 22.615, MHD Theory of Fusion Systems Prof. Freidberg Lecture 21 Page 3 of 10 ∂I ∂I from force relation , ∂Z ∂R 5. Eliminate BR (R0 , Z0 ) = 0 6. FZ = 0 → 2πRIBR = 0 FR = 0 → − I2 ∂L ⎞ ⎛ ∂L + I ⎜I − 2πRBZ ⎟ = 0 2 ∂R ⎝ ∂R ⎠ Shafranov result BZ (R 0 , Z0 ) = μ0I ⎡ 8R 0 ⎤ I ∂L ln = − 1⎥ 4πR 0 ∂R 0 4πR 0 ⎢⎣ a ⎦ Vertical Stability 1. FZ = −LI ∂I = 2πRIBR ∂Z ∂FZ ∂B ⎤ ∂B ∂I ⎡ = 2πR ⎢BR + I R ⎥ = 2πRI R ∂Z ∂ ∂ ∂Z Z Z ⎣ ⎦ < 0 for stability 0 from eq. but ∂BR ∂BZ from ∇ × B = 0 = ∂Z ∂R define n (R 0 , Z0 ) = − use BZ = R 0 ∂BZ field index BZ ∂R 0 I ∂L from equilibrium 4πR 0 ∂R 2. Then vertical stability requires − I2 ∂L n < 0 or n > 0 2R 0 ∂R 0 defines shape of vertical field 22.615, MHD Theory of Fusion Systems Prof. Freidberg Lecture 21 Page 4 of 10 Physical Picture 1. with curvature as shown BZ < 0 ∂BR >0 ∂Z ∴n = − ∂BR ∂B ⎛ ∂BZ ⎞ = → Z > 0⎟ ⎜ ∂ R ∂ Z ∂ R ⎝ ⎠ R ∂BZ >0 BZ ∂R 2. give the plasma a vertical displacement Horizontal Stability Similar calculation gives n<3 2 ∼ Mercier and Ballooning Modes 1. High n localized internal modes. Competition between line bending and curvature 22.615, MHD Theory of Fusion Systems Prof. Freidberg Lecture 21 Page 5 of 10 2. Very localized modes: Suydam 1-D, Mercier 2-D attempt to make line bending as small as possible. Examine remainder of the curvature terms 3. Less localized modes: Ballooning modes important when the curvature oscillates optimally worst eigenfunction. Some line bending, concentration of mode in bad curvature region 4. Plan: Outline derivations of ballooning mode equation and show how Mercier criterion arises. Starting Point ⎡ Q 2 B2 2 2 1 δWF = ∇ ⋅ ξ⊥ + 2ξ⊥ ⋅ κ + γp ∇ ⋅ ξ ⊥ dr ⎢ ⊥ + μ0 2 ⎢ μ0 ⎣ ∫ )( ( ) ( ) −2 ξ⊥ ⋅ ∇p ξ*⊥ ⋅ κ − J ξ*⊥ × b ⋅ Q⊥ ⎤ ⎦ 1. Choose ξ so ∇ ⋅ ξ = 0 (OK since we assume shear is non-zero) 2. Introduce large n1 localization assumption by means of an eikonal representation for ξ⊥ (similar to WKB) rapid variation ξ⊥ = n⊥e ιS slow variation (equilibrium scale) 3. Define k ⊥ = ∇S B ⋅ ∇S = 0 S does not vary along B (minimizes line bending) a∇n⊥ ∼1 n⊥ a∇S k ⊥ → ∞ limit 1 4. Evaluate terms: Q⊥ = eιS ⎡⎣∇ × (n⊥ × B ) ⎤⎦ ⊥ because B ⋅ ∇S = 0 5. Then δWF = 1 2μ0 ∫ dr ⎡⎢⎣ ∇ × n 2 ⊥ ( no ∇ S derivatives × B + B2 ιk ⊥ ⋅ n⊥ + ∇ ⋅ n⊥ + 2κ ⋅ n⊥ ) ( 2 ) * * −2μ0 (n⊥ ⋅ ∇p ) n⊥ ⋅ κ − μ0 J n⊥ × b ⋅ ⎡⎣∇ × (n⊥ × B ) ⎤⎦ ⎤⎥ ⊥⎦ 6. Take the limit k ⊥ → ∞ and expand n⊥ = n⊥ 0 + n⊥1 + ...,n⊥1 n⊥ 0 ∼ 22.615, MHD Theory of Fusion Systems Prof. Freidberg 1 k ⊥a Lecture 21 Page 6 of 10 7. Zero Order: k ⊥ ⋅ n⊥ = 0 slowly varying n⊥ = Y b × k ⊥ Then δW0 = 0 8. Second Order: May Comp. terms: only appearance of n⊥1 δWc = 1 2μ0 ∫ 2 dr B2 ιk ⊥ ⋅ n⊥1 + ∇ ⋅ n⊥ 0 + 2κ ⋅ n⊥ 0 Choose ιk ⊥ 0 n⊥1 = −∇ ⋅ n⊥ 0 − 2κ ⋅ n⊥ 0 magnetic compressibility does not enter 9. Simple calculation shows that ⎡⎣∇ × (n⊥ 0 × B ) ⎤⎦ = (b ⋅ ∇X ) (b ⋅ k ⊥ ) ⊥ X = YB basic unknown in the problem 10. Another simple calculation shows that ( ) * J n⊥ × b ⋅ ⎡⎣∇ × (n⊥ × B ) ⎤⎦ = 0 kink term does not enter ⊥ 11. Final δWF : competition between line bending and field line curvature δW2 = 1 2μ0 ⎡ ∫ dr ⎢⎣k 2 ⊥ (b ⋅ ∇X )2 − 2μ0 B2 ⎤ (b × k ⊥ ⋅ ∇ p ) ( b × k ⊥ ⋅ κ ) X 2 ⎥ ⎦ Application to tokamaks 1. Flux Coordinates 2. R, Z → ψ, χ B= F ∇ψ × eφ eφ + R R κ = b ⋅ ∇b Choose χ orthogonal ∇ψ − ∇χ = 0 3. Then BP = ∇ψ R dr = 2πR dR dZ = 2π J dψ dχ R J = eφ ⋅ ∇χ × ∇ψ = RBp ⋅ ∇χ 4. Vector decomposition 22.615, MHD Theory of Fusion Systems Prof. Freidberg Lecture 21 Page 7 of 10 n= b= t= ∇ψ ∇ψ Bp B bp + Bϕ eϕ B bp = Bp Bp Bp Bϕ eϕ bp − B B 5. Curvature κ = κn n + κt t geodesic curvature normal curvature 6. k ⊥ ∂S ∂S 1 ∂S eϕ ∇ψ + ∇χ + R ∂φ ∂ψ ∂χ k ⊥ = kn n + k t t = kn = n ⋅ ∇S = (n ⋅ ∇ψ ) k t = t ⋅ ∇S = ( t ⋅ ∇χ ) ∂S ∂ψ ∂S 1 ∂S + ( t ⋅ eϕ ) R ∂φ ∂χ 7. k × k ⊥ = k t n − kn t 8. Fourier analysis ξ⊥ ∝ ξ⊥ ( ψ, χ ) e−ιnφ ∴S ( ψ, φ, χ ) = −nφ + S ( ψ, χ ) X ( ψ, φ, χ ) = X ( ψ, χ ) ⎡ ∂X ⎤ ∂X 1 ∂X 9. b ⋅ ∇X = b ⋅ ⎢ ∇ψ + ∇χ ⎥ = JB ∂ψ ∂χ ∂χ ⎣ ⎦ 10. Combine results: δW2 = W (ψ) = ∫ 2π 0 π μ0 ∫ dψ W ( ψ ) 2 ⎡ 2μ0RBp dp 2 2 2 ⎛ 1 ∂X ⎞ ⎢ Jdχ kn + k t ⎜ k t κn − k tkn κ ⎟ − dψ ⎢⎣ B2 ⎝ JB ∂χ ⎠ ( ) ( ) a. note that only χ derivatives appears on X b. stability can be tested one surface at a time !! 22.615, MHD Theory of Fusion Systems Prof. Freidberg Lecture 21 Page 8 of 10 Remaining problem: find S 1. S ( ψ, ϕ, χ ) satisfies B ⋅ ∇S = 0 or Bϕ ∂S 1 ∂S + =0 R ∂φ J ∂χ 2. S = −nφ + S ( ψ, χ ) or ⎡ S = +n ⎢ −φ + ⎣ ∫ χ χ0 JBϕ ' ⎤ dχ ⎥ R ⎦ 3. Basic problem with shear and periodicity. Expand about a rational surface ψ = ψ0 for localized modes ⎡ S ≈ n ⎢ −φ + ⎣⎢ ⎛ JBϕ ⎞ ' ⎜ ⎟ dχ + ( ψ − ψ 0 ) χ0 ⎝ R ⎠ ψ0 ∫ χ ∫ Rational surface n ∫ χ χ0 ∂ ⎛ JBϕ ⎞ ' ⎤ dχ ⎥ ∂ψ ⎜⎝ R ⎟⎠ ⎦⎥ JBϕ ⎞ ' ⎜ R ⎟ dχ = 2πm ⎝ ⎠ ψ0 χ0 + 2 π ⎛ χ0 4. Problem: S ( ψ, ϕ, χ ) = S ( ψ, φ, χ + 2π ) for periodic solutions. Last term prevents this property since n ( ψ − ψ0 ) can be finite if n 1. 5. Problem resolved by Connor, Hastre and Taylor Introduce quasi modes ξ ( ψ, χ ) = ∑ξ ϕ ( ψ, χ + 2πp ) p ξ periodic in χ = 2π ξ ϕ exists for −∞ < χ < ∞ 6. ξϕ is not periodic, but if it decays fast enough as χ → ± ∞ then ξ is periodic 7. Redo entire calculation, almost by inspection. F ( ψ, χ ) ξ = 0 F ( ψ, χ ) = F ( ψ, χ + 2π ) ( ) ∑ F ( ψ, χ ) ξϕ ( ψ, χ + 2πp ) F ξ = p = ∑ F ( ψ, χ + 2πp ) ξ p ϕ ( ψ, χ + 2πp ) ( ) ∴ξϕ satisfies F ξϕ = 0 same equation as ξ 8. Whole analysis is now identical except for two points X → Xϕ quasimode amplitude 22.615, MHD Theory of Fusion Systems Prof. Freidberg Lecture 21 Page 9 of 10 ∫ 2π 0 Jdχ → ∫ ∞ −∞ Jdχ Conclusion: 2 ⎡ ⎤ 2μ0RBp dp 2 ⎛ 1 ∂X ⎞ 2 ⎥ − κ − κ X Jdχ ⎢ kn2 + k2t ⎜ k k k ⎟ t n t n t −∞ dψ ⎢⎣ ⎥⎦ B2 ⎝ JB ∂χ ⎠ X ( −∞ ) = X ( ∞ ) = 0 W (ψ) = kt = ∫ ( ∞ ) ( ) nB RBp kn = nRBp ∫ χ χ0 ∂ ⎛ JBϕ ⎞ ' ⎜ ⎟ dχ ∂ψ ⎜⎝ R ⎟⎠ On each surface minimize W ( ψ ) : Find X satisfying X ( −∞ ) = X ( ϕ ) = 0 .Vary χ0 to find the worst case. 22.615, MHD Theory of Fusion Systems Prof. Freidberg Lecture 21 Page 10 of 10