LECTURE 24 Review Maximum likeliho d estimation o
advertisement

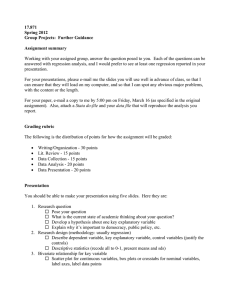
LECTURE 24 Review • Maximum likeliho o d estimation – Have model with unknown parameters: X ∼ pX (x; θ) – Pick θ that “makes data most likely” • Reference: Section 9.3 • Course Evaluations (until 12/16) http://web.mit.edu/subjectevaluation 476 Classical Statistical Inference max pX (x; θ) Chap. 9 θ – Compare to Bayesian MAP estimation: Outline in the context of various probabilistic frameworks, which provide perspective and a mechanism for quantitative analysis. • consider Reviewthe case of only two variables, and then generalize. We We first wish to model–theMaximum relation between two variables of interest, x and y (e.g., years likelihood estimation of education and income), based on a collection of data pairs (xi , yi ), i = 1, . . . , n. For example, – xi could be the years of education and yi the annual income of the Confidence intervals ith person in the sample. Often a two-dimensional plot of these samples indicates a systematic,• approximately linear relation between xi and yi . Then, it is natural Linear regression to attempt to build a linear model of the form max pΘ|X (θ | x) or max θ θ pX |Θ(x|θ)pΘ(θ) pY (y) • Sample mean estimate of θ = E[X] Θ̂n = (X1 + · · · + Xn)/n • 1 − α confidence interval y ≈ θ0 testing + θ1 x, • Binary hypothesis + P(Θ̂− n ≤ θ ≤ Θ̂n ) ≥ 1 − α, θ1 are unknown parameters to be estimated. where θ0 and – Types of error In particular, given some estimates θ̂0 and θ̂ 1 of the resulting parameters, the value yi corresponding to xiratio , as predicted by the model, is – Likelihood test (LRT) ∀ θ • confidence interval for sample mean ŷi = θ̂0 + θ̂1 xi . – let z be s.t. Φ(z) = 1 − α/2 � Generally, ŷi will be different from the given value yi , and the corresponding difference ỹi = yi − ŷi , � zσ zσ P Θ̂n − √ ≤ θ ≤ Θ̂n + √ ≈1−α n n is called the ith residual. A choice of estimates that results in small residuals is considered to provide a good fit to the data. With this motivation, the linear regression approach chooses the parameter estimates θ̂ 0 and θ̂1 that minimize the sum of the squared residuals, n n � � (yi − ŷi )2 = (yi − θ0 − θ1 xi )2 , i=1 i=1 over all θ1 and θ2 ; see Fig. 9.5 for an illustration. Regression y Residual x yi − θˆ0 − θˆ1 xi (xi , yi ) × Linear regression × • Model y ≈ θ0 + θ1x × min x y = θ̂0 + θ̂1 x • Solution (set derivatives to zero): × × x + · · · + xn x= 1 , n yx • Data: (x1, y1), (x2, y2), . . . , (xn, yn) θ̂1 = Figure 9.5: Illustration of a set of data pairs (xi , yi ), and a linear model y = by minimizing θ̂ 0 + θ̂ 1 x, + θθ01, θx1 the sum of the squares of the residuals •obtained Model: y ≈ θ0over yi − θ 0 − θ1 x i . min θ0 ,θ1 n � ( yi − θ0 − θ 1 x i ) 2 i=1 n � 1 − (yi − θ0 − θ1xi)2 2σ 2 i=1 �n i=1(xi − x)(yi − y) �n 2 i=1(xi − x) • Interpretation of the form of the solution – Assume a model Y = θ0 + θ1X + W W independent of X, with zero mean – Likelihood function fX,Y |θ (x, y; θ) is: � y + · · · + yn y= 1 n θ̂0 = y − θˆ1x (∗) • One interpretation: Yi = θ0 + θ1xi + Wi, Wi ∼ N (0, σ 2), i.i.d. c · exp ( y i − θ 0 − θ 1 xi )2 θ0 ,θ1 i=1 × =0 n � – Check that � � cov(X, Y ) E (X − E[X])(Y − E[Y ]) � � θ1 = = var(X) E (X − E[X])2 – Take logs, same as (*) – Solution formula for θˆ1 uses natural estimates of the variance and covariance – Least sq. ↔ pretend Wi i.i.d. normal 1 � The world of regression (ctd.) The world of linear regression • In practice, one also reports • Multiple linear regression: – data: (xi, x�i, xi��, yi), i = 1, . . . , n – Confidence intervals for the θi – model: y ≈ θ0 + θx + θ �x� + θ ��x�� – “Standard error” (estimate of σ) – R2, a measure of “explanatory power” – formulation: min n � (yi − θ0 − θxi − θ �x�i − θ ��x��i )2 θ,θ� ,θ �� i=1 • Some common concerns – Heteroskedasticity • Choosing the right variables – Multicollinearity – model y ≈ θ0 + θ1h(x) e.g., y ≈ θ0 + θ1x2 – Sometimes misused to conclude causal relations – work with data points (yi, h(x)) – etc. – formulation: min θ n � (yi − θ0 − θ1h1(xi))2 i=1 Binary hypothesis testing Likelihood ratio test (LRT) • Binary θ; new terminology: – null hypothesis H0: X ∼ pX (x; H0) • Bayesian case (MAP rule): choose H1 if: P(H1 | X = x) > P(H0 | X = x) or [or fX (x; H0)] P(X = x | H1)P(H1) P(X = x | H0)P(H0) > P(X = x) P(X = x) or P(X = x | H1) P(H0) > P(X = x | H0) P(H1) – alternative hypothesis H1: [or fX (x; H1)] X ∼ pX (x; H1) • Partition the space of possible data vectors Rejection region R: reject H0 iff data ∈ R (likelihood ratio test) • Nonbayesian version: choose H1 if • Types of errors: P(X = x; H1) > ξ (discrete case) P(X = x; H0) – Type I (false rejection, false alarm): H0 true, but rejected fX (x; H1) >ξ fX (x; H0) α(R) = P(X ∈ R ; H0) – Type II (false acceptance, missed detection): H0 false, but accepted (continuous case) • threshold ξ trades off the two types of error – choose ξ so that P(reject H0; H0) = α (e.g., α = 0.05) β(R) = P(X �∈ R ; H1) 2 MIT OpenCourseWare http://ocw.mit.edu 6.041 / 6.431 Probabilistic Systems Analysis and Applied Probability Fall 2010 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.