Course 18.327 and 1.130 Wavelets and Filter Banks Discrete Time Filters
advertisement

Course 18.327 and 1.130
Wavelets and Filter Banks
Discrete-time filters: convolution;
Fourier transform; lowpass and
highpass filters
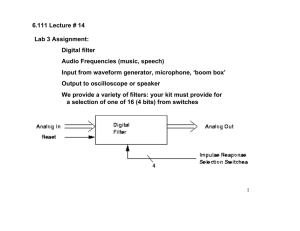
Discrete Time Filters
Input
→
x[n]
Filter
Output
→
y[n]
n denotes the time variable: {…, -2, -1, 0, 1, 2, …}
x[n] denotes the sequence of input values:
{…, x[-2], x[-1], x[0], x[1], x[2], …}
y[n] denotes the sequence of output values:
{…, y[-2], y[-1], y[0], y[1], y[2], …}
Assume that
a) the principle of superposition holds ⇔ system is
linear, i.e. combining any two inputs in the form
Ax1[n] + Bx2[n]
results in an output of the form
Ay1[n] + By2[n]
2
1
b) the behavior of the system does not change with
time, i.e. a delayed version of any input
xd[n] = x[n - d]
produces an output with a corresponding delay
yd[n] = y[n – d]
Under these conditions, the system can be
characterized by its response, h[n], to a unit
impulse, δ[n], which is applied at time n = 0,
1
i.e. the particular input
x[n] = δ[n]
L
L
-2 -1 0 1 2 n
produces the output
y[n] = h[n]
h[0]
h[1]
h[-1]
h[-2]
h[2]
L
L
-2 -1 0 1 2 n
Unit
Impulse
Impulse
Response
3
The general input
∞
x[n] = ∑ x[k] δ[n
δ – k]
k = -∞
will thus produce the output
∞
y[n] = ∑ x[k]h[n-k]
k = -∞
Convolution sum
4
2
Fourier Transform
Discrete time Fourier transform
∞
ω
X(ω)
ω = ∑ x[n] e-iωn
n = -∞
∞
Inverse
x[n] =
1
2π
π
π
⌠
ω dω
ω eiωn
ω
⌡ X(ω)
-π
5
Frequency Response
Suppose that we have the particular input
ω
x[n] = eiωn
ω
H(ω)
ω eiωn
ω
eiωn
What is the output?
→
→
y[n] = ∑ h[k] x [n - k]
k
ω ∑ h[k] e-iωk
ω
= eiωn
k
14243
H(ω)
ω
Frequency Response
6
3
Convolution Theorem
π
A general input
1 ⌠
ω dω
x[n] = 2π
ω eiωn
ω
π ⌡ X(ω)
-π
will thus produce the output
π
1
ω dω
y[n] = 2π ⌠ X(ω)
H(ω)
ω eiωn
ω → Y(ω)
ω = X(ω)
ω H(ω)
ω
π ⌡ ω
- π 14243
Y(ω)
ω
Convolution
Convolution of sequences x[n] and h[n] is denoted by
h[n] ∗ x[n] = ∑ x[k] h[n - k] = y[n] (say)
k
7
Matrix form:
O O O
Oh[0] h[-1] h[-2]
Oh[1] h[0] h[-1] h[-2]
h[2] h[1] h[0] h[-1] h[-2]
h[2] h[1] h[0] h[-1]O
h[2] h[1] h[0] O
O
O
O
1444442444443
Toeplitz matrix
M
x[-2]
x[-1]
x [0]
x [1]
x[2]
M
=
M
y[-2]
y[-1]
y[0]
y[1]
y[2]
M
8
4
Convolution is the result of multiplying polynomials:
(… + h[-1]z + h[0] +h[1]z-1 + …) (… + x[-1]z + x[0] +
x[1]z-1 + …) = (… + y[-1]z + y[0] + y[1]z-1 + …)
Example:
3
3
-3
12 4
6 2 -10
6 14 -9
1 -5 2
2
4 -1
-1
5 -2
-20 8 0
4
0 0
-17 13 -2
↑ ↑ ↑
z-5 z-4 z-3
↑
z-2
2
1
0 1
-5
4
2
0
-1
1
x[n]
3
h[n]
2
2
14
13
6
↑ ↑
z-1 z0
y[n]
0 1 2
-2
3
4
5
-9
-17
9
Discrete Time Filters (summary)
Discrete Time:
x[n]
→
h[n]
y[n]
→
y[n] = ∑ x[k] h [n-k]
(Convolution)
k
Discrete –time Fourier transform
ω
X(ω)
ω = ∑ x[n] e-iωn
n
Frequency domain representation
Y(ω)
(Convolution theorem)
ω = H(ω)
ω • X(ω)
ω
10
5
Toeplitz Matrix representation:
M
y[-2]
y[-1]
y[0]
y[1]
y[2]
M
=
O O O
Oh[0] h[-1] h[-2]
Oh[1] h[0] h[-1] h[-2]
h[2] h[1] h[0] h[-1] h[-2]
h[2] h[1] h[0] h[-1]O
h[2] h[1] h[0] O
O
O
O
M
x[-2]
x[-1]
x [0]
x [1]
x[2]
M
Filter is causal if y[n] does not depend on future
values of x[n].
Causal filters have h[n] = 0 for n < 0.
11
Filters
a) Lowpass filter example:
y[n] = ½ x[n] + ½ x [n-1]
Filter representation:
y[n]
x[n]
→
h[n]
→
y[n] = ∑ x[k] h [n-k]
k
Impulse response is
½ ½
h[n]
L
L
0 1
n
12
6
Frequency Response is
H(ω
ω) = ∑ h[k]e-iωωk
k
= ½ + ½ e-iωω
Rewrite as H(ω
ω) = H(ω
ω) eiφφ(ωω)
H(ω
ω) = cos( ω /2) e-iωω/2 ; -π ≤ ω ≤ π
13
b) Highpass Filter Example
y[n] = ½ x[n] - ½ x[n-1]
Impulse response is
½
h[n]
L
L
0
1
n
-½
14
7
Frequency response is
H(ω)
ω = ½ - ½ e-iωω
ω
= i sin (ω/2)
ω e-iω/2
142
1
4
243
4
3
π
sin (ω/2)
ω e–i(π/2
=
π
sin (ω/2)
ω ei(π/2
+ ω/2)
ω
- ω/2)
ω
; -π
π≤ω<0
; 0<ω≤ π
15
8



![2E2 Tutorial sheet 7 Solution [Wednesday December 6th, 2000] 1. Find the](http://s2.studylib.net/store/data/010571898_1-99507f56677e58ec88d5d0d1cbccccbc-300x300.png)