14. Frequency response
advertisement

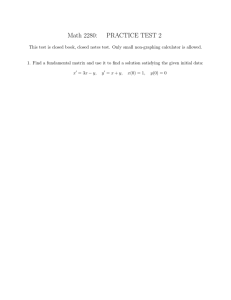
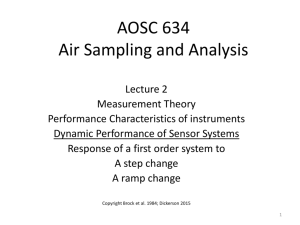
62 14. Frequency response In Section 3 we discussed the frequency response of a first order LTI operator. In Section 10 we used the Exponential Response Formula to understand the response of an LTI operator to a sinusoidal input signal. Here we will study this in more detail in case the operator is of second order, and understand how the gain and phase lag vary with the driving frequency. A differential equation relates input signal to system response. What constitutes the “input signal” and what constitutes the “system re­ sponse” are matters of convenience for the user, and are not deter­ mined by the differential equation. We will illustrate this in a couple of examples. The case of sinusoidal input signal and system response are particularly important. The question is then: what is the ratio of amplitude of the system response to that of the input signal, and what is the phase lag of the system response relative to the input signal? We will carry this analysis out three times: first for two specific examples of mechanical (or electrical) systems, and then in general using the notation of the damping ratio. 14.1. Driving through the spring. The Mathlet Amplitude and Phase: Second order I illustrates a spring/mass/dashpot system that is driven through the spring. Suppose that y denotes the displacement of the plunger at the top of the spring, and x(t) denotes the position of the mass, arranged so that x = y when the spring is unstretched and uncompressed. There are two forces acting on the mass: the spring exerts a force force given by k(y − x) (where k is the spring constant), and the dashpot exerts a force given by −bẋ (against the motion of the mass, with damping coefficient b). Newton’s law gives mẍ = k(y − x) − bẋ or, putting the system on the left and the driving term on the right, (1) mẍ + bẋ + kx = ky . In this example it is natural to regard y, rather than ky, as the input signal, and the mass position x as the system response. Another system leading to the same equation is a series RLC cir­ cuit, discussed in Section 8 and illustrated in the Mathlet Series RLC Circuit. We consider the impressed voltage as the input signal, and the voltage drop across the capacitor as the system response. The 63 y Spring x Mass Dashpot Figure 6. Spring-driven system equation is then LV̈C + RV̇C + (1/C)VC = (1/C)V We will favor the mechanical system notation, but the mathematics is exactly the same in both systems. When y is sinusoidal, say y = A cos(�t) , then (putting aside the possibility of resonance) we expect a sinusoidal solution, one of the form x = B cos(�t − π) The ratio of the amplitude of the system response to that of the input signal, B/A, is called the gain of the system. We think of the system as fixed, while the frequency � of the input signal can be varied, so the gain is a function of �, g(�). Similarly, the phase lag π is a function of �. The entire story of the steady state system response to sinusoidal input signals is encoded in those to functions of �, the gain and the phase lag. There is a systematic way to work out what g and π are. The equation (1) is the real part of a complex-valued differential equation: mz̈ + bż + kz = Akest with s = i�. The Exponential Response Formula gives the solution Ak st zp = e p(s) 64 where p(s) = ms2 + bs + k ∈ 0). (as long as p(s) = Our choice of input signal and system response correspond in the complex equation to regarding Aest as the input signal and zp as the exponential system response. The transfer function is the ratio be­ tween the two: k W (s) = p(s) so zp = W (s)Aest . Now take s = i�. The complex gain is k (2) W (i�) = . k − m� 2 + ib� I claim that the polar form of the complex gain determines the gain g and the phase lag π as follows: W (i�) = ge−iζ To verify this, substitute this expression into the formula for zp — zp = g e−iζ Aei�t = gAei(�t−ζ) —and extract the real part, to get the sinusoidal solution to (1): yp = gA cos(�t − π) . The amplitude of the input signal, A, has been multiplied by the gain k (3) g(�) = |W (i�)| = � 2 2 k + (b − 2mk)� 2 + m2 � 4 The phase lag of the system response, relative to the input signal, is π = −Arg(W (i�)). Since Arg(1/z) = −Arg(z), π is the argument of the denominator in (2). The tangent of the argument of a complex number is the ratio of the imaginary part by the real part, so b� tan π = k − m� 2 The Amplitude and Phase: Second order I Mathlet shows how the gain varies with �. Often there is a choice of frequency � for which the gain is maximal: this is “near resonance.” To compute what this frequency is, we can try to minimize the denominator in (3). That 65 minimum occurs when k 2 + (b2 − 2mk)� 2 + m2 � 4 is minimized, which occurs when � is either 0 or the resonant frequency � k b2 − �r = m 2m2 � When b = 0, this is the natural frequency �n = k/m and we have true resonance; the gain becomes infinite. ≤ As we increase b, the resonant frequency decreases, till when b = 2mk we find �r = 0. For b less than this, practical resonance occurs only for � = 0. 14.2. Driving through the dashpot. Now suppose instead that we fix the top of the spring and drive the system by moving the bot­ tom of the dashpot instead. This is illustrated in Amplitude and Phase: Second order II. Suppose that the position of the bottom of the dashpot is given by y(t), and again the mass is at x(t), arranged so that x = 0 when the spring is relaxed. Then the force on the mass is given by d mẍ = −kx + b (y − x) dt since the force exerted by a dashpot is supposed to be proportional to the speed of the piston moving through it. This can be rewritten (4) m¨ x + bx˙ + kx = by˙ . Spring x Mass Dashpot y Figure 7. Dashpot-driven system Again we will consider x as the system response, and the position of the back end of the dashpot, y, as the input signal. Note that the 66 derivative of the input signal (multiplied by b) occurs on the right hand side of the equation. Another system leading to the same mathematics is the series RLC circuit shown in the Mathlet Series RLC Circuit, in which the impressed voltage is the input variable and the voltage drop across the resistor is the system response. The equation is LV̈R + RV̇R + (1/C)VR = RV̇ Here’s a frequency response analysis of this problem. We suppose that the input signal is sinusoidal: y = B cos(�t) . Then ẏ = −�B sin(�t) so our equation is (5) mẍ + bẋ + kx = −b�B sin(�t) . The periodic system response will be of the form xp = gB cos(�t − π) for some gain g and phase lag π, which we now determine by making a complex replacement. The right hand side of (5) involves the sine function, so one natural choice would be to regard it as the imaginary part of a complex equa­ tion. This would work, but we should also keep in mind that the input signal is B cos(�t). For that reason, we will write (5) as the real part of a complex equation, using the identity Re (iei�t ) = − sin(�t). The equation (5) is thus the real part of (6) mz̈ + bż + kz = bi�Bei�t . and the complex input signal is Bei�t (since this has real part B cos(�t)). The sinusoidal system response xp of (5) is the real part of the expo­ nential system response zp of (6). The Exponential Response Formula gives bi� Bei�t zp = p(i�) where p(s) = ms2 + bs + k is the characteristic polynomial. The complex gain is the complex number W (i�) by which you have to multiply the complex input signal to get the exponential system response. Comparing zp with Bei�t , we see that bi� W (i�) = . p(i�) 67 As usual, write W (i�) = ge−iζ so that zp = W (i�)Bei�t = gBei(�t−ζ) Thus xp = Re (zp ) = gB cos(�t − π) —the amplitude of the sinusoidal system response is g times that of the input signal, and lags behind the input signal by π radians. �To make this more explicit, let’s use the natural frequency �n = k/m. Then so p(i�) = m(i�)2 + bi� + m�n2 = m(�n2 − � 2 ) + bi� , W (i�) = m(�n2 bi� . − � 2 ) + bi� Thus the gain g(�) = |W (i�)| and the phase lag π = −Arg(W (i�)) are determined as the polar coordinates of the complex function of � given by W (i�). As � varies, W (i�) traces out a curve in the complex plane, shown by invoking the [Nyquist plot] in the applet. To under­ stand this curve, divide numerator and denominator in the expression for W (i�) by bi�, and rearrange: � ⎨−1 i �n2 − � 2 W (i�) = 1 − . b/m � As � goes from 0 to ↓, (�n2 − � 2 )/� goes from +↓ to −↓, so the expression inside the brackets follows the vertical straight line in the complex plane with real part 1, moving upwards. As z follows this line, 1/z follows a circle of radius 1/2 and center 1/2, traversed clockwise (exercise!). It crosses the real axis when � = �n . This circle is the “Nyquist plot.” It shows that the gain starts small, grows to a maximum value of 1 exactly when � = �n (in contrast to the spring-driven situation, where the resonant peak is not exactly at �n and can be either very large or non-existent depending on the strength of the damping), and then falls back to zero. Near resonance occurs at � r = �n . The Nyquist plot also shows that −π = Arg(W (i�)) moves from near ν/2 when � is small, through 0 when � = �n , to near −ν/2 when � is large. And it shows that these two effects are linked to each other. Thus a narrow resonant peak corresponds to a rapid sweep across the far edge 68 of the circle, which in turn corresponds to an abrupt phase transition from −π near ν/2 to −π near −ν/2. 14.3. Second order frequency response using damping ratio. As explained in Section 13, it is useful to write a second order system with sinusoidal driving term as (7) ẍ + 2α�nẋ + �n2 x = a cos(�t) . The constant �n is the “natural frequency” of the system and α is the “damping ratio.” In this abstract situation, we regard the full right hand side, a cos(�t), as the input signal, and x as the system response. The best path to the solution of (7) is to view it as the real part of the complex equation (8) z̈ + 2α�nż + �n2 z = aei�t . The Exponential Response Formula of Section 10 tells us that unless α = 0 and � = �n (in which case the equation exhibits resonance, and has no periodic solutions), this has the particular solution (9) zp = a ei�t p(i�) where p(s) = s2 + 2α�ns + �n2 is the characteristic polynomial of the system. In Section 10 we wrote W (s) = 1/p(s), so this solution can be written zp = aW (i�)ei�t . The complex valued function of � given by W (i�) is the complex gain. We will see now how, for fixed �, this function contains exactly what is needed to write down a sinusoidal solution to (7). As in Section 10 we can go directly to the expression in terms of amplitude and phase lag for the particular solution to (7) given by the real part of zp as follows. Write the polar expression (as in Section 6) for the complex gain as 1 (10) W (i�) = = ge−iζ . p(i�) so that g(�) = |W (i�)| , π(�) = Arg(W (i�)) Then zp = ag ei(�t−ζ) , xp = ag cos(�t − π), The particular solution xp is the only periodic solution to (7), and, assuming α > 0, any other solution differs from it by a transient. This solution is therefore the most important one; it is the “steady state” 69 solution. It is sinusoidal, and hence determined by just a few parame­ ters: its circular frequency, which is the circular frequency of the input signal; its amplitude, which is g times the amplitude a of the input signal; and its phase lag π relative to the input signal. We want to understand how g and π depend upon the driving fre­ quency �. The gain is given by 1 1 (11) g(�) = =� . |p(i�)| (�n2 − � 2 )2 + 4α 2 �n2 � 2 Figure 8 shows the graphs of gain against the circular frequency of the signal for �≤n = 1 and several values ≤ ≤ of the ≤ damping ratio α (namely α = 1/(4 2), 1/4, 1/(2 2), 1/2, 1/ 2, 1, 2, 2.) As you can see, the gain may achieve a maximum. This occurs when the square of the denominator in (11) is minimal, and we can discover where this is by differentiating with respect to � and setting the result equal to zero: � d � 2 (12) (�n − � 2 )2 + 4α 2 �n2 � 2 = −2(�n2 − � 2 )2� + 8α 2 �n2 �, d� and this becomes zero when � equals the resonant frequency � (13) �r = �n 1 − 2α 2 . When α = 0 the gain becomes infinite at � = �n : this is true res­ onance. As α increases from zero, the maximal gain of≤the system occurs at smaller and smaller frequencies, till when α = 1/ 2 the max­ imum occurs at � = 0. For still larger values of α, the only maximum in the gain curve occurs at � = 0. When � takes on a value at which the gain is a local maximum we have practical resonance. We also have the phase lag to consider: the periodic solution to (7) is xp = ga cos(�t − π). Returning to (10), π is given by the argument of the complex number p(i�) = (�n2 − � 2 ) + 2iα�n � . This is the angle counterclockwise from the positive x axis of the ray through the point (�n2 − � 2 , 2α�n �). Since α and � are nonnegative, this point is always in the upper half plane, and 0 → π → ν. The phase response graphs for �n = 1 and several values of α are shown in the second figure. When � = 0, there is no phase lag, and when � is small, π is approx­ imately 2α�/�n. π = ν/2 when � = �n , independent of the damping 70 3 2.5 gain 2 1.5 1 0.5 0 0 0.5 1 1.5 circular frequency of signal 2 2.5 3 1.5 circular frequency of signal 2 2.5 3 0 −0.1 −0.2 phase shift: multiples of pi −0.3 b=4 −0.4 −0.5 −0.6 −0.7 −0.8 −0.9 −1 0 0.5 1 Figure 8. Second order amplitude response curves 71 rato α: when the signal is tuned to the natural frequency of the system, the phase lag is ν/2, which is to say that the time lag is one-quarter of a period. As � gets large, the phase lag tends towards ν: strange as it may seem, the sign of the system response tends to be opposite to the sign of the signal. Engineers typically have to deal with a very wide range of frequen­ cies. In order to accommodate this, and to show the behavior of the frequency response more clearly, they tend to plot log 10 |1/p(i�)| and the argument of 1/p(i�) against log10 �. These are the so-called Bode plots. The expression 1/p(i�), as a complex-valued function of �, contains complete information about the system response to periodic input sig­ nals. If you let � run from −↓ to ↓ you get a curve in the complex plane called the Nyquist plot. In cases that concern us we may re­ strict attention to the portion parametrized by � > 0. For one thing, the characteristic polynomial p(s) has real coefficients, which means that p(−i�) = p(i�) = p(i�) and so 1/p(−i�) is the complex conju­ gate of 1/p(i�). The curve parametrized by � < 0 is thus the reflection of the curve parametrized by � > 0 across the real axis. MIT OpenCourseWare http://ocw.mit.edu 18.03 Differential Equations �� Spring 2010 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.