Chapter 7. Geophysical Fluid Dynamics of Coastal Region
advertisement

1
Lecture Notes on Fluid Dynamics
(1.63J/2.21J)
by Chiang C. Mei, 2002
Chapter 7. Geophysical Fluid Dynamics of Coastal Region
[Ref]: Pedlosky Geophysical Fluid Dynamics Springer-Verlag
Csanady: Circulation in the Coastal Ocean, Kluwer
7.1
Equations of Motion in Rotating Coordinates
Since the earth is rotating about the polar axis, the coordinate system fixed on earth is
rotating. We need to know how to express the time rate of change of dynamical quantities
in the rotating coordinates.
A vector fixed in the rotating coordinate system is rotating in the fixed (inertial) coordinate system. Consider therefore a vector rotating in the inertial frame of reference.
7.1.1
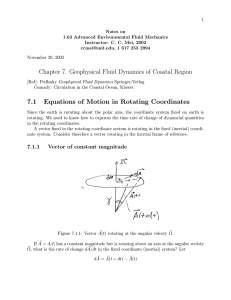
Vector of constant magnitude
~ rotating at the angular velocity Ω.
~
Figure 7.1.1: Vector A(t)
~ = Ai~ei has a constant magnitude but is rotating about an axis at the angular vecloty
If A
~ what is the rate of change dA/dt
~
Ω,
in the fixed coordinate (inertial) system? Let
~ = A(t
~ + dt) − A(t)
~
dA
From Figure 7.1.1,
~
dA
dθ
=~
e |A| sin γ ,
dt
dt
I
2
~ Note ~e ⊥ A
~
where subscript I signifies ”inertial system” and ~e is the unit-vector along dA.
~
and ~e ⊥ Ω. Hence,
~ ×A
~
Ω
.
~e =
~ ×A
~|
|Ω
and ,
~
~ ×A
~
dA
Ω
~ | sin γ dθ ,
=
|A
~ ×A
~|
dt
dt
|Ω
I
Since
dθ
= Ω,
dt
~ ×A
~ |= Ω | A
~ | sin γ.
Ω
it follows that
~
dA
~ × A.
~
=Ω
dt
(7.1.1)
I
~ = ~ei , i = 1, 2, 3 be a base vector in the rotating frame of reference,
In particular, let A
~ = ~ei 6= ~e
A
Then
d~ei ~ × ~ei .
=Ω
dt I
7.1.2
(7.1.2)
A vector of variable magnitude
Let
~ = Bi ~ei
B
be any non-constant vector in the rotating frame, and let
~
dB
dBi
=
~ei
dt
dt
R
denote its rate of change in the rotating frame. then
~
~
~
dB
dBi
d~ei dB
~ × ~ei = dB + Ω
~ × B.
~
=
+ Bi Ω
~ei + Bi
=
dt
dt
dt
dt
dt
I
R
R
~ = ~r is the position of a fluid particle
In particular, if B
d~r d~r ~ × ~r,
=
+Ω
dt I
dt R
(7.1.3)
3
Note that ~r is the same in any coordinate system. Now (d~r/dt)I is the velocity seen in the
inertial frame of reference and (d~r/dt)R is the velocity seen in the rotating frame of reference,
i.e.,
~ × ~r;
q~I = ~qR + Ω
(7.1.4)
Next we let ~qR be the velocity vector of fluid in the rotating frame of reference; its rates
of change in the two frames of reference are related by
d~qR d~qR ~ × ~qR .
=
+Ω
dt I
dt R
(7.1.5)
Taking the time derivative of (7.1.4), and assuming that the angular acceleration of earth to
be zero,
~
dΩ
=0
dt
we get
d~qI
dt
!
=
d~qR
dt
=
d~qR
dt
I
=
d~qR
dt
!
!I
!R
R
~ × d~r
+Ω
dt
!
I
~ × ~qR + Ω
~ ×
+Ω
+
~ × ~qR
2Ω
|
{z
}
Coriolis acc.
"
d~r
dt
!
~ × ~r
+Ω
R
#
~ × (Ω
~ × ~r)
+Ω
|
{z
(7.1.6)
}
centripetal
Figure 7.1.2: Coriolis force, position vector and angular velocity
~
The second term on the right is the Coriolis force, being perpendicular to both ~q and Ω.
The last term represents the centripetal force
~ × (Ω
~ × ~r) = −|Ω|2 r~⊥ ,
Ω
See Figure 7.1.2 for the geometric relations.
The centripetal force may be written in terms of a centripetal force potential φc where
φc =
1 ~
~ × ~r) = 1 |Ω|2 r 2 .
(Ω × ~r) · (Ω
⊥
2
2
(7.1.7)
4
so that
−∇φc = −
7.1.3
dφc
~e⊥ = −|Ω|2 r~⊥ ,
dr⊥
(7.1.8)
Summary of governing equations in rotating frame of reference:
Continuity:
∇ · q~ = 0
(7.1.9)
In the coordinate system rotating at the constant angular velocity, the momentum equation
reads, after dropping subscripts R
!
d~q
~ × q~ = −∇p + ρ∇(φg + φc ) + µ∇2 q~
ρ
+ 2Ω
dt
where
φg = gz
7.1.4
φc =
(7.1.10)
1 ~
~ × ~r
Ω × ~r · Ω
2
Dimensionless parameters
∂~
q
∂t
2Ω × q~
q~ · ∇~q
~ × ~q
2Ω
=
ν∇2 q~
2Ω × q~
=
O
=
U 2 /L
2ΩU
U
T
1
O
ΩT
=
ΩU
=
U
2ΩL
=
νU/L2
ν
=
=
2ΩU
2ΩL2
∇φg = ~g
∇φc
=
Rossby number
Ekman number
Ω2~rL
For numerical estimate, we take Ω = 12 1hrs = 2.31 × 10−5 s−1 and r = earth radius = 6400
2
km. Then ω 2 r ∼ (2.31 × 10−5 ) × 6.4 × 106 ∼ 3 × 10−3 m/s2 while g ∼ 10m/s2 . Hence
g Ω2 r; gravity is more important than centripetal force.
7.1.5
Coriolis force
Refering to the right of Figure 7.1.3
~ = ~i (−Ω cos θ) + ~j(0) + ~k(Ω sin θ)
Ω
Introducing the spherical polar coordinates as in the left of Figure Refering to the right
of Figure 7.1.3, with θ being the latitude. The Coriolis force is
5
Figure 7.1.3: The Northern hemisphere.
~i
~ × q~ = −2Ω cos θ
2Ω
u
=
~k
2Ω sin θ
w
~j
o
v
~i (−2Ωv sin θ) + ~j (2Ωu sin θ + 2Ωw cos θ) + ~k (−2Ωv cos θ)
Consider shallow waters where the depth D is much less than the horizontal length L,
i.e., D L, and compare the two terms in the y direction of (~j)
2Ωw cos θ
w
D
= cot θ = O
cot θ 1
2Ωu sin θ
u
L
except along the equator where θ = 0
In the z direction of (~k),
−2Ωv cos θ
1 ∂d p
ρ ∂z
Hence in shallow seas
=
−2Ωu cos θ
L ∂pd
D ∂x
=
D −2Ωu cos θ
D
=O
2
L max U , U , ΩU
L
T
L
1
~ × ~q ∼
2Ω
= ~i(−2Ωv sin θ) + ~j(2Ωu sin θ)
Define
f = 2Ω sin θ
(7.1.11)
~ × ~q = −f v ~i + f u ~j
2Ω
(7.1.12)
to be the Coriolis parameter, then
In the northern hemisphere, 0 < θ < π/2.