Summary of binary detection with vector ob

Summary of binary detection with vector ob servation in iid Gaussian noise.:
First remove center point from signal and its effect on observation.
Then signal is
± a . and v =
± a + Z .
Find v, a and compare with threshold (0 for
ML case).
This does not depend on the vector basis becomes trivial if a normalized is a basis vector.
Received components orthogonal to signal are irrelevant.
1
QAM DETECTION
Input
�
Signal encoder a
∈A
�
Baseband modulator u ( t
�
Baseband
→
) passband x ( t )
�
+
WGN
Output
�
Detector
� v
Baseband
�
Demodulator v ( t )
Passband
→ baseband
� y ( t )
We have seen how to design a MAP or ML detector from observing v . We generalize to an arbitrary complex signal set
A
We also question what the entire receiver should do from observation of y ( t ) or v ( t ) .
2
The baseband waveform is u ( t ) = ap ( t ) where a = a
1
+ ia
2 with a
1
=
{ a
}
, a
2
=
{ a
}
.
The passband transmitted waveform is x ( t ) = a
1
Ψ
1
( t ) + a
2
Ψ
2
( t ) .
Ψ
1
( t ) =
{
2 p ( t ) e
2 πif c t }
; Ψ
2
( t ) =
{
2 p ( t ) e
2 πif c t }
These two waveforms are orthogonal (in real vector space), each with energy 2. For p ( t ) real, they are just p ( t ) modulated by cosine and sine.
The received waveform is
Y ( t ) = ( a
1
+ Z
1
)Ψ
1 where Z
( t ) + ( a
2
+ Z
2
)Ψ
2
( t ) + Z ( t )
( t ) is real passband WGN in other de grees of freedom.
3
Y ( t ) = ( a
1
+ Z
1
)Ψ
1
( t ) + ( a
2
+ Z
2
)Ψ
2
( t ) + Z ( t )
Since Ψ
1 and Ψ
2 are orthogonal and equal en ergy, Z
1 and Z
2 are iid Gaussian.
After translation of passband signal and noise to baseband,
V ( t ) = [ a
1
+ Z
1
+ i ( a
2
+ Z
2
)] p ( t ) + Z ”( t )
Z ”( t ) is the noise orthogonal (in complex vec tor space) to p ( t ) .
First consider detection in real vector space.
Here ( a
1
, a
2
) represents the hypothesis and Z
1 are iid Gaussian,
N
(0 , N
0
/ 2) .
, Z
2
4
V ( t ) = [ a
1
+ Z
1
+ i ( a
2
+ Z
2
)] p ( t ) + Z ”( t )
Let Y
1
= a
1
+ Z
1
, Y
2
= a
2
+ Z
2
.
Note that V ( t ) p
∗
( τ
− t ) dt is the output from a complex matched filter. Sampling this at τ = 0 yields ( Y
1
+ iY
2
) .
The components in an expansion Z
3
, Z
4
, . . .
, in an orthonormal expansion of Z ”( t ) are also ob servable, although we will not need them.
5
Z
3
, Z
4
, . . .
, are real Gaussian rv’s and can also be viewed as passband rv’s. Assume a finite number of these variables. For any two hy potheses, a and a , the likelihoods are f f
Y
|
H
Y
( y
| a ) =
1
( πN
0
) k
2 −
( y j
− a j
)
2
+
2 k − z
2 j exp j =1
N
0 j =3
N
0
|
H
( y
|
LLR ( y
1
) =
( πN
0
) =
2 j =1
2
) k y j a exp j
−
N j =1
2
0
2 y j a
− j
( y j
− a j
N
=
0
2 j =1
)
2
+
2 y j
2 k
N
0
− z
( a j j =3
− a j
)
N
0
2 j
As usual, ML decoding is minimum distance decoding.
6
We can rewrite the likelihood as f
Y
|
H
( y
| a ) = f ( y
1 y
2
| a ) f ( z
3
, z
4
, . . .
, )
So long as Z
3
, Z
4
, . . .
are independent of Y
1
, Y
2 and H , they cancel out in the LLR.
This is why it makes sense to use the WGN model - all we need in detection is the inde pendence from the relevant rv’s.
In other words, ( Y
1
, Y
2
) is a sufficient statistic and Z
3
, Z
4
, . . .
, are irrelevant (so long as they are independent of Y
1
, Y
2
, H ).
This is true for all pairwise comparisons be tween input signals.
7
Now view this detection problem in terms of complex rv’s. Let α = a
− a .
LLR ( y ) =
2 2 y j
( a j
− a j
= j =1
N
0
)
=
2 j =1
2 y
2
{ y
}{
α
}
+
{ y
}{
α
} j
α
N
0 j
=
2
{ yα
∗
N
0
N
0
}
=
2
{ y, α
}
N
0
In real vector space, we project y onto α .
In complex space, 2-vectors become scalars, inner product needs real part to be taken.
The real part is a “further projection” of a complex number to a real number.
8
Now let’s look at the general case in WGN.
Must consider problem of real signals and noise for arbitrary modulation.
The signal set
A
=
{ a
1
, . . .
, a
M
}
, is a set of k tuples. a m
= ( a m, 1
, . . .
, a m,k
)
T
.
a m is then modulated to k b m
( t ) = a m,j
φ j
( t ) j =1 where
{
φ
1
( t ) , . . .
, φ k
( t )
} is a set of k orthonormal waveforms.
Successive signals are independent and mapped arbitrarily, using orthogonal spaces.
9
Let X ( t )
∈ { b
1
( t ) , . . .
, b
M
( t )
}
. Then k
X ( t ) = X j
φ j
( t ) j =1 where, under hypothesis m ,
X j
= a m,j for 1
≤ j
≤ k
Let φ k +1
( t ) , φ k +2
( t ) . . .
be an additional set of orthonormal functions such that the entire set
{
φ j
( t ); j
≥
1
} spans the space of real
L
2 wave forms. k
Y ( t ) = Y j
φ j
( t ) = ( X j
+ Z j
) φ j
( t ) + j =1 j =1 j = k +1
Z j
φ j
( t ) .
10
k
Y ( t ) = Y j
φ j
( t ) = ( X j
+ Z j j =1 j =1
) φ j
( t ) + j = k +1
Z j
φ j
( t ) .
Assume Z =
{
Z
1
, . . .
, Z k
} are iid Gauss.
{
Z k +1
, . . .
,
} is independent of Z and of a .
Z f
Y ,Z
|
H
( z
| m ) =
Z
( y
− a m
) f
Z
( z ) .
=
Λ m,m
= f f
Z
Z
( y
− a m
)
( y
− a m
)
.
The MAP detector depends only on Y . The other signals and other noise variables are ir relevant.
11
This says that detection problems reduce to finite dimensional vector problems; that is, sig nal space and observation space are for all practical purposes finite dimensional.
The assumption of independent noise and in dependent other signals is essential here.
With dependence, error probability is lowered; what you don’t know can’t hurt you.
12
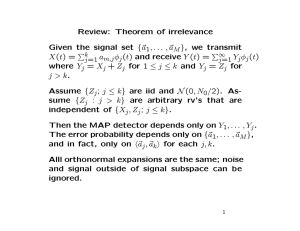
Detection for Orthogonal Signal Sets
We are looking at an alphabet of size m , map ping letter j into Eφ j
( t ) where
{
φ j
( t )
} is an orthonormal set.
WGN of spectral density N
0
/ 2 is added to the transmitted waveform.
The receiver gets
Y ( t ) = Y j
φ j
( t ) = ( X j
+ Z j
) φ j
( t ) j j
Only
{
Y
1
, . . .
, Y m
} is relevant.
Under hypothesis k , Y k
=
√
E + Z j for j = k . and Y j
= Z j
13
Use ML detection. Choose k for which y, k is smallest.
| y, k
| 2
= y
2 j
+ ( y k j = k
− n k
)
2
= m j =1 y
2 y
+ E
−
2
√
Ey k
ML: choose k for which y k is largest.
By symmetry, the probability of error is the same for all hypotheses so we look at hypoth esis 1.
First scale outputs by N
0
/ 2 , i.e., W j
= Y j
2 /N
0
.
Under H
1
, W
1 for j = 1 .
∼ N
E/N
0
, 1) and W
Pr( e ) =
∞
−∞ f
W
1
|
H
( w
1
|
1) Pr
m j =2 j
∼
(0 ,
1)
( W j
≥ w
1
|
1)
dw
1
14
MIT OpenCourseWare http://ocw.mit.edu
6.450 Principles of Digital Communication I
Fall 2009
For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms .