Document 13511346
advertisement

10.34, Numerical Methods Applied to Chemical Engineering
Professor William H. Green
Lecture #20: Boundary Value Problems Lecture 3. Finite Differences, Method of
Lines, and Finite Elements.
Finite Differences
mesh finite
difference
for D̂
Dˆ ϕ + S (ϕ ) = 0 ⎯⎯ ⎯⎯→ A ⋅ φ + S = 0
Fi(φ) = (ΣAijφj) + S(φi) = 0
Jin =
∂Fi
∂φ n
i = 1, Nmesh*Nscalar fields
Solve F(φ) = 0 by Newton-type methods
⎛%
⎜
⎜%
⎜
⎜
⎜
⎜
Need Jacobian J: Jin = Ain +δinS’(φi). J =
⎜
⎜
⎜
⎜%
⎜
⎜⎜
⎝0
%
% %
% % %
% % %
% % %
% %
0
%
%
%
%
%
0
%
% %
% %
%
0⎞
⎟
⎟
%⎟
⎟
⎟
⎟ + ⎛⎜% 0 ⎞⎟
⎟ ⎜ 0 %⎟
⎠
⎟ ⎝
⎟
⎟
%⎟
⎟
%⎟⎠
Iterative, need good initial guess φguess!
(normally, JΔφ = -F )
Method of Lines
e.g. 2D, vy = 0, vx independent of φ:
v x ( x, y )
∂ϕ
∂x
+ϕ
x , yi
convection
∂v x
∂x
x , yi
⎛ ∂ 2ϕ ∂ 2ϕ ⎞
∂
∂
+ D⎜⎜ 2 + 2 ⎟⎟ + S (ϕ ( x, y ) ) = 0 ∇ ⋅ (ϕ v) = (ϕv x ) + (ϕv y )
∂x
∂y
∂y ⎠
⎝ ∂x
diffusion coefficient D
replace
0
if vy = 0
ϕ ( x, y i +1 ) − 2ϕ ( x, y i ) + ϕ ( x, yi −1 )
(Δy ) 2
Cite as: William Green, Jr., course materials for 10.34 Numerical Methods Applied to Chemical
Engineering, Fall 2006. MIT OpenCourseWare (http://ocw.mit.edu), Massachusetts Institute of
Technology. Downloaded on [DD Month YYYY].
ui(x) = φ(x,yi)
w(x) =
∂φ
⎛ u1
⎜
⎜ w1
⎜u
⎜ 2
⎜ w2
⎜
d ⎜ #
dx ⎜ u i
⎜
⎜ wi
⎜ #
⎜
⎜uNy
⎜w
⎝ xy
⎞
⎟
⎟
⎟
⎟
⎟
⎟ ⎛
⎟ = ⎜ v x ( x, y i )
1 ∂v x
wi −
⎟ ⎜−
⎜
D
D ∂x
⎟ ⎝
⎟
⎟
⎟
⎟
⎟
⎠
wi
⎞
⎟
u i +1
ui
u i −1
S (u i ) ⎟
−2
−
−
ui −
D ⎟⎠
( Δy ) 2
(Δy ) 2 (Δy ) 2
x , yi
/∂x|(x,yi)
A mess, but we can solve stiff ODEs better than PDEs. Variables: 2Nmesh. Coarse
discretization easy; finer mesh makes complexity rise. Better for steep front.
Diffusion/conduction dominated – Elliptic PDEs
•
microfluidics, cells, reaction no convection
•
no sharp fronts
Finite Differences, Method of Lines
every φ(xi, yj) depends on all the others
Convection-dominated, wave equations – Hyperbolic PDEs
•
information flows in a direction, shockwaves, flames
Stiff ODEs solve with
•
sharp fronts Å-----Æ numerical instabilities, oscillations
adaptive mesh
Finite Element Method (FEM)
Î FEMLAB
Galerkin’s Method
φ = ∑ cn χ n (x ) want to retain sparsity
local basis functions
χ n (x − x n )
points connected only to neighbors. Used in fluid mechanics and quantum
mechanics (must consider electrostatic attraction).
1D example
10.34, Numerical Methods Applied to Chemical Engineering
Prof. William Green
Lecture 20
Page 2 of 4
Cite as: William Green, Jr., course materials for 10.34 Numerical Methods Applied to Chemical
Engineering, Fall 2006. MIT OpenCourseWare (http://ocw.mit.edu), Massachusetts Institute of
Technology. Downloaded on [DD Month YYYY].
⎧
⎪
χ n = ⎨1 −
⎪⎩
| x − xn |
Δx
0
if x n -1 < x < x n+1
Add lots of xn close to steep gradient
otherwise
Singularities but can integrate by parts.
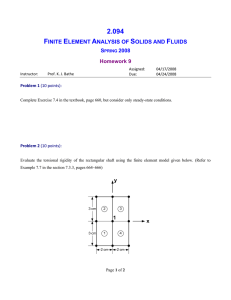
Figure 1. Add points close to steep
gradient. Separate into parts at
singularity.
∫ dx χ n ( x)(Dˆ ϕ ( x) + S (ϕ )) = 0
∫ χ n ∇ ϕ = − ∫ ∇χ n ⋅∇ϕ − ∫ ∇ ⋅(χ n ∇ϕ )
2
0
n = 1, N mesh Local integral: 0 except in range xn-1< x < xn+1.
f n (φ n −1 , φ n , φ n +1 ) = 0
F (φ ) = 0
Nonzero close to mesh point.
Method good when there are only short range
forces.
This equation is difficult to write. Usually use software that is already written: e. g. MATLAB
PDE Tool Box or FEMLab
⎛% % 0 ⎞
⎟
⎜
J = ⎜% % %⎟ { easy to solve this Jacobian for finite differences, sparse matrix
⎜ 0 % %⎟
⎠
⎝
Discussion
V2φ
cylindrical:
3D
1 ∂ ⎛ ∂ϕ ⎞
⎜r
⎟
r ∂r ⎝ ∂r ⎠
Nmesh ~ 106
J ~ 106 x 106 = 1012 (computer cannot store this)
Conjugate gradient-type solvers for JΔφ = -F (N steps: still 106)
MatLAB solver: GMRes Works even if matrix is not positive definite
f(Δφ) = ||JΔφ + F||2 (minimize this within N steps)
Preconditioning
Text has a number of tricks for good preconditioning (i.e. Jacobi method see textbook)
Initial guess of φ is important for convergence
10.34, Numerical Methods Applied to Chemical Engineering
Prof. William Green
Lecture 20
Page 3 of 4
Cite as: William Green, Jr., course materials for 10.34 Numerical Methods Applied to Chemical
Engineering, Fall 2006. MIT OpenCourseWare (http://ocw.mit.edu), Massachusetts Institute of
Technology. Downloaded on [DD Month YYYY].
Finite Volumes
∂ϕ
= Dˆ ϕ + S (ϕ )
∂t
Instead of mesh points, we use mesh volumes.
Operator splitting Method
transport
~
→ t + Δt/2
ϕ ( xi , y i ,.t ) ⎯t⎯
⎯⎯→ ϕ new ( xi , y i ,.t )
d
ϕ i = s (ϕ i ) using Nmesh ODE solver: φ(t0) = φnew
dt
Δt
transport, ( Δt / 2 )
ϕ new ⎯chemistry,
⎯ ⎯ ⎯⎯
→ ϕ i (t f ) ⎯⎯
⎯ ⎯ ⎯⎯→ ϕ ( xi , yi , t + Δt )
splitting error ~(Δt)2
Δt< Δx/vx to prevent numerical instability
Model system must have no mixing. Nspecies compare to NspeciesNmesh for Method of Lines
10.34, Numerical Methods Applied to Chemical Engineering
Prof. William Green
Lecture 20
Page 4 of 4
Cite as: William Green, Jr., course materials for 10.34 Numerical Methods Applied to Chemical
Engineering, Fall 2006. MIT OpenCourseWare (http://ocw.mit.edu), Massachusetts Institute of
Technology. Downloaded on [DD Month YYYY].