6.642 Continuum Electromechanics �� MIT OpenCourseWare Fall 2008

MIT OpenCourseWare http://ocw.mit.edu
Fall 2008
For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms .
6.642
— Continuum Electromechanics
Problem Set 6 - Solutions
Prof. Markus Zahn
Problem 8.10.1
Fall 2008
MIT OpenCourseWare
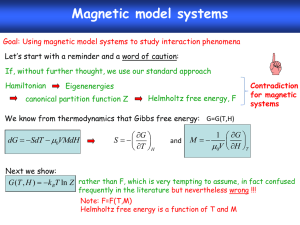
Figure 1: A planar layer of insulating liquid separates infinite half-spaces of perfectly conducting liquid
(Image by MIT OpenCourseWare.)
With the designations indicated in the figure, first consider the bulk relations. The perturbation electric field is confined to the insulating layer, where
� d x e x
�
= k
�
− coth kd
− 1 sinh kd
1 sinh kd coth kd
� � Φ d
Φ e
�
. (1)
The transfer relation for the mechanics are applied three times. Perhaps it is best to first write the second of the following relations, because the transfer relations for the infinite half space (with it understood that k > 0) follow as limiting cases of the general relations.
ˆ c = jωρ k
ϑ c x
= −
ω 2 ρ k
ξ a (2)
� ˆ d
ˆ e
�
= jωρ s k
�
− coth kd
− 1 sinh kd
1 sinh kd coth kd
� � ϑ
ˆ d x e x
�
= −
ω 2 ρ s k
�
− coth kd
− 1 sinh kd
1 sinh kd coth kd
ˆ f
= − jωρ k
ϑ f
=
ω 2 k
ρ
ξ b
Now, consider the boundary conditions. The interfaces are perfectly conducting, so
� � ξ a
ξ b
� n × E = 0 ⇒ − E
0
∂ξ
∂z
= e z
.
In terms of the potential, this becomes
Φ a = E
0
ξ a .
(3)
(4)
(5)
(6)
1
Problem Set 6 6.642, Fall 2008
Similarly,
Φ b = E
0
ξ b .
Stress equilibrium for the x direction is
(7)
[ p ] n x
= [ T xj
] n j
− γ � · n n x
. (8)
In particular,
(Π c
+ p � c
) − (Π d
+ p � d
) = −
�
2
( E
0
+ e x
)
2
+ γ
� ∂ 2
∂y
ξ
2
+
∂ 2
∂z
ξ
2
�
.
Hence, in terms of complex amplitudes, stress equilibrium for the upper interface is
− p c p d − �E
0 d x
− k
2
γξ a = 0 .
Similarly, for the lower interface,
− p e p f + �E
0 e x
− k
2
γξ b = 0 .
(9)
(10)
(11)
Eqs. 1-4 can be substituted into Eqs. 9 and 10, which become
�
ω
2
ρ k
+ ω
2 k
ρ s coth kd
− ω
2
ρ s k sinh kd
+
−
�E 2
0 k
2
�
0
E
0 coth k sinh kd kd − k 2 γ
ω
2
ρ k
+
ω
2 k
ρ s
− ω
2
ρ s k sinh kd
−
�E
2
0 k sinh kd coth kd + �
0
E 2
0 k coth kd − k 2 γ
For the kink mode ( ξ a = ξ b ), both of these expressions are satisfied if
�
� ξ a
ξ b
�
= 0 . (12)
ω 2 k
�
ρ + ρ s coth kd −
ρ s sinh kd
�
�
+ �E
2
0 k coth kd −
1 sinh kd
�
− k
2
γ = 0 . (13)
With the use of the identity (cosh u − 1) / sinh u = tanh u/ 2, this expression reduces to
ω 2
� k
ρ + ρ s tanh kd �
2
= γk
2
− �E
2
0 k tanh kd
2
.
For the sausage mode ( ξ a = − ξ b ), both are satisfied if
ω 2 k
�
ρ + ρ s coth kd +
ρ s sinh kd
�
�
+ �E
2
0 k coth kd +
1 sinh kd
�
− k
2
γ = 0 , and because (cosh u + 1) / sinh u = coth u/ 2,
ω 2
� k
ρ + ρ s coth kd �
2
= γk
2
− �E
2
0 k coth kd
2
.
In the limit kd �
ω 2
� k
ρ + ρ s kd
2
� �
= γ −
�E 2
0 d �
2 k
2
,
(14)
(15)
(16)
(17)
ω 2 � k
ρ +
2 ρ s
� kd
= γk
2
−
2 �E d
2
0
. (18)
Thus, the effect of the electric field on the kink mode is equivalent to having a field dependent surface tension with γ → γ − �E 2
0 d/ 2. The sausage mode is unstable at k → 0 (infinite wavelength) with E
0 kink mode is unstable at E
0
= 0 while the
= � 2 γ/�d . If the insulating liquid filled in a hole between regions filled by high conductivity liquid, the hole boundaries would limit the values of possible k ’s. Then there would be a threshold value of E
0
.
Courtesy of James R. Melcher. Used with permission.
Melcher, James R. Solutions Manual for Continuum Electromechanics , 1982.
2
Problem Set 6 6.642, Fall 2008
Problem 8.12.1
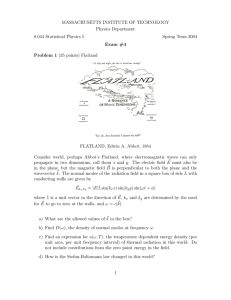
In the vacuum regions to either side of the center perfectly conducting fluid layer the magnetic fields take the form
H = − H
0 i z
+ h , (19)
H = H
0 i z
+ h , where h = −� Ψ.
(20)
Figure 2: A middle layer of perfectly conducting fluid separates two vacuum regions having oppositely directed magnetic fields ± H
0 i z
(Image by MIT OpenCourseWare.)
In the regions to either side, the mass density is negligible, and so the pressure there can be taken as zero. In the fluid, the pressure is therefore p =
1
2
µ
0
H
2
0
+ � ˆ j ( ωt − k y y − k z z )
, (21) where p is the perturbation associated with departures of the fluid from static equilibrium. Boundary conditions reflect the electromechanical coupling and are consistent with fields governed by Laplace’s equation in the vacuum regions and fluid motions governed by Laplace’s equation in the layer. That is, one boundary condition on the magnetic field at the surfaces bounding the vacuum, and one boundary condition on the fluid mechanics at each of the deformable interfaces. First, because n · B = 0 on the perfectly counducting interfaces, h c x
= 0 (22)
� i x
∂ξ
− i
∂y y
∂ξ
− i
∂z z
�
· [ − H
0 i z
+ h ] = 0 ⇒ h d x
= jk z
ξ a H
0 h g x
= − jk z
ξ b H
0
3
(23)
(24)
Problem Set 6 6.642, Fall 2008 h h x
= 0
In the absence of surface tension, stress balance requires that
[ p ] n x
= [ T xj
] n j
.
(25)
(26)
In particular, to linear terms at the right interface
ˆ e
= − µ
0
H
0 d z
= − jk z
µ
0
H
0
Ψ d
.
Similarly, at the left interface
ˆ f = µ
0
H
0 h g z
= jk z
µ
0
H
0
Ψ g .
(27)
(28)
In evaluating these boundary conditions, the amplitudes are evaluated at the unperturbed position of the interface. Hence, the coupling between interfaces through the bulk regions can be represented by the transfer relations. For the fields, Eqs. (a) of Table 2.16.1 (in the magnetic analogue) give
� Ψ c
Ψ d
�
=
1 �
− coth ka k −
1 sinh ka
1 sinh ka coth ka
� � h
ˆ c x d x
�
, (29)
� Ψ g
Ψ h
�
=
1 �
− coth ka k −
1 sinh ka
1 sinh ka coth ka
� � h g x h x
�
.
For the fluid layer, Eqs. (c) of Table 7.9.1 become
� ˆ e
ˆ f
�
= jωρ �
− coth kd k −
1 sinh kd
1 sinh kd coth kd
� � ϑ e x
ϑ f x
�
.
(30)
(31)
Because the fluid has a static equilibrium, at the interfaces, ϑ e x
= jωξ a , ϑ f x
= jωξ b . It sounds more
Eqs. 31 which are arranged to give
�
−
ω
2 k
ρ coth kd + µ
0
H
2
0 k k
2 z
−
ω
2
ρ 1 k sinh kd coth ka
ω
2
ρ k
ω
2
ρ 1 coth kd k sinh kd
−
µ
0
H k
2 k
2
0 z coth ka
�
� ξ a �
ξ b
= 0 .
For the kink mode, note that setting ξ a = ξ b
insures that both of Eqs. 32 are satisfied if 1
(32)
ω 2 k
ρ tanh
Similarly, if ξ a kd
2
= −
=
ξ b
µ
0
H k
2
0 k 2 z coth ka.
, so that a sausage mode is considered, both equations are satisfied if
ω 2 ρ k coth kd µ
0
2
=
H k
2
0 k 2 z coth ka.
(33)
(34)
These last two expression comprise the dispersion equations for the respective modes. It is clear that both of the modes are stable. Note however that perturbations propagating in the y direction ( k z
= 0) are only neutrally stable. This is the “interchange” direction discussed with Fig. 8.12.3. Such perturbations result in no change in the magnetic field between the fluid and the walls and in no change in the surface currect. As a result, there is no perturbation magnetic surface force density tending to restore the interface.
1 tanh
1
2 u
= cosh u
− sinh u
1
= sinh u cosh u
+1
.
Courtesy of James R. Melcher. Used with permission.
Melcher, James R. Solutions Manual for Continuum Electromechanics , 1982.
4