6.641 �� Electromagnetic Fields, Forces, and Motion
advertisement

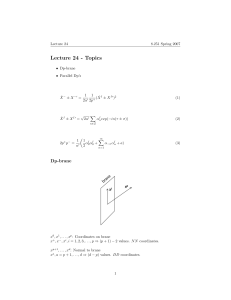
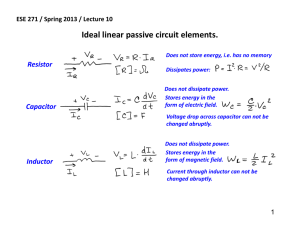
MIT OpenCourseWare http://ocw.mit.edu 6.641 �� Electromagnetic Fields, Forces, and Motion Spring 2005 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 6.641 — Electromagnetic Fields, Forces, and Motion Spring 2005 Problem Set 8 - Solutions Prof. Markus Zahn MIT OpenCourseWare Problem 8.1 A From Fig. 6P.1 we see the geometric relations r � = r, θ � = θ − Ωt, z � = z, t� = t There is also a set of back transformations r = r � , θ = θ � + Ωt, z = z � , t = t� (1) B Using the chain rule for partial derivatives � �� � � �� � � �� � � �� � ∂Ψ ∂r ∂Ψ ∂θ ∂Ψ ∂z ∂Ψ ∂t ∂Ψ + + + = ∂t� ∂r ∂t� ∂θ ∂t� ∂z ∂t� ∂t ∂t� From (1) we learn that ∂r ∂θ ∂z ∂t = 0, � = Ω, � = 0, � = 1 ∂t� ∂t ∂t ∂t Hence, ∂Ψ ∂Ψ ∂Ψ = +Ω ∂t� ∂t ∂θ We note that the remaining partial derivatives of Ψ are ∂Ψ ∂Ψ ∂Ψ ∂Ψ ∂Ψ ∂Ψ = , � = , � = � ∂r ∂r ∂θ ∂θ ∂z ∂z Problem 8.2 A In the frame rotating with the cylinder Ē � (r � ) = K¯ ir r� H̄ � = 0, B̄ � = µ0 H̄ � = 0 But then since r � = r, v̄r (r) = rω īθ Ē = Ē � − v̄r × B̄ � = Ē � = K īr r 1 Problem Set 8 V = � b 6.641, Spring 2005 Ē · d¯l = a � b a K b dr = K ln( ) r a V 1− → → ¯ = V� � 1 − E i = Ē � = � b � � ir b r r r ln a ln a The surface charge density is then → − ¯ � = ε0 V 1 = σa σa� = ir · ε0 E ln ab a → − ¯ � = ε0 V 1 = σb σb� = − ir · ε0 E ln ab b B J¯ = J¯� + v̄r ρ� But in this problem we have only surface currents and charges K̄ = K̄ � + v̄r σ � = v̄r σ � aωε0 V − → → ωε0 V − ¯ � b � iθ = K(a) = iθ a ln a ln ab bωε0 V → ωε0 V − → − ¯ K(b) =− i =− iθ b θ b ln a ln ab C → ¯ = − ωε0 V − H iz b ln a D ¯ =H ¯ � + v̄r × D̄� = v̄r × D̄� H � � � � ε V 1 → − − → 0 � ¯ =rω H i i × θ r ln ab r � → ¯ = − ωε0 V − H iz ln ab This result checks with the calculation of part (c). Problem 8.3 A We assume the simple magnetic field � → − − Di i3 0 < x1 < x ¯ H= 0 x < x1 λ(x) = � µ0 W x i B̄ · d¯a = D 2 Problem Set 8 6.641, Spring 2005 B µ0 W x λ(x, i) = i D Since the system is linear L(x) = W � (i, x) = 1 µ0 W x 2 1 L(x)i2 = i 2 2 D C fe = � ∂Wm 1 µ0 W 2 = i ∂x 2 D (2) D The mechanical equation is M d2 x dx 1 µ0 W 2 +B = i dt2 dt 2 D (3) The electrical circuit equation is � � d µ0 W x dλ = i = V0 dt dt D (4) E From (3) we learn that dx µ0 W 2 = i = constant dt 2BD while from (4) with i constant, we learn that µ0 W i dx = V0 D dt Solving these two simultaneously � �1 DV02 3 dx = dt 2µ0 W B F From (2) i= � 2BD dx = µ0 W dt � D µ0 W � 32 1 1 (2B) 3 V03 G As in part A, � − → − Di i3 0 < x1 < x H̄ = 0 x < x1 3 Problem Set 8 6.641, Spring 2005 H The surface current K̄ is K̄ = − i(t) ī2 D The force on the short is � ¯ � ¯ � ¯ × µ0 H1 + µ0 H2 F¯ = J¯ × B̄dv = DW K 2 µ0 W 2 − → = i (t) i1 2 (5) (6) I ∂E2 − µ0 di − ∂ B̄ → → i3 = − = i3 ∂x1 ∂t D dt � � → ¯ = µ0 x di + C − i2 E D dt � � µ0 x di V (t) − → i2 = − D dt W � × Ē = J Choosing a contour with the right leg in the moving short, the left leg fixed at x1 = 0 � � d → − →� − E · dl = − B̄ · dā dt S C Since E � = 0 in the short and we are only considering quasistatic fields � dx ∂H0 → − →� − + W µ0 H0 E · d l = V (t) = W xµ0 ∂t dt � � d µ0 W x = i(t) dt D (7) K n̄ × (Ē b ) = Vn B̄ b Here µ0 i − dx b → − → , B̄ = − i3 n̄ = i1 , Vn = dt D � � � � µ0 x di V (t) − dx µ0 − → → Ēb = − i2 = − i i2 D dt W dt D � � d µ0 xW i µ0 xW di µ0 iW dx + = V (t) = D dt D dt dt D (8) L Equations (6) and (2) are identical. Equations (8), (7), and (4) are identical if V (t) = V0 . Since we used (2) and (4) to solve the first part we would get the same answer using (6) and (7) in the second part. 4 Problem Set 8 6.641, Spring 2005 M Since di dt =0 Ē2 (x) = − V (t) − V0 − → → iy = − iy w W Problem 8.4 A The electric field in the moving laminations is − → − →� − → J i − J → = = iz E� = σ σ σA The electric field in the stationary frame is � � i − → − →� − → E = E − V̄ × B̄ = + rωBy iz σA µ0 N i By = − S � � 2D µ0 2DrωN V = i − σA S Now we have the V − i characteristic of the device. The device is in series with an inductance and a load resistor Rt = RL + Rint . � � µ0 N 2 aD di 2D µ0 2DrN − ω i+ =0 Rt + σA S S dt B Let R1 = Rt + i = I0 e− Pd = If R1 L 2D 2Dµ0 rN ω µ0 N 2 aD − ,L = σA S S t I 2 � R1 �2 i2 = 0 e− L t RL RL R1 = Rt + 2D 2Dµ0 rN ω − <0 σA S the power delivered is unbounded as t → ∞. C As the current becomes large, the electrical nonlinearity of the magnetic circuit will limit the exponential growth and determine a level of stable steady state operation (see Fig. 6.4.12). 5 Problem Set 8 6.641, Spring 2005 Problem 8.5 A The armature circuit equation is vA = Ra ia + GIf ω (9) The equation of motion is J dω = GIf ia dt Which may be integrated to yield � G t ω(t) = ia (t) J −∞ (10) Combining (10) with (9) (GIf )2 vA = Ra ia + Jr � t ia (t) −∞ We recognize that C= Jr (GIf )2 C= Jr (0.5) = = 0.22 farads 2 (GIf ) (1.5)2 (1) B Problem 8.6 1 dif + if (Rr + Rf − Gω) + (Lr + Lf ) dt C � if dt = 0 d2 if (Rr + Rf − Gω) dif 1 + + if = 0 dt2 Lr + Lf dt (Lr + Lf )C if = Iest (Rr + Rf − Gω) 1 s+ =0 (Lr + Lf ) (Lr + Lf )C �� � 12 �2 1 Rr + Rf − Gω Rr + Rf − Gω − s=− ± 2(Lr + Lf ) 2(Lr + Lf ) (Lr + Lf )C s2 + A Self excited if −Gω + Rr + Rf < 0 ⇒ ω > Rr +Rf G 6 Problem Set 8 6.641, Spring 2005 B dc self-excitation � Rr + Rf − Gω 2(Lr + Lf ) �2 − 1 4(Lr + Lf ) > 0, C > (Lr + Lf )C [Rr + Rf − Gω]2 �2 − 1 4(Lr + Lf ) <0⇒C< (Lr + Lf )C [Rr + Rf − Gω]2 ac self-excitation � Rr + Rf − Gω 2(Lr + Lf ) C Frequency ω0 = � 1 (Lr +Lf )C − � Rr +Rf −Gω 2(Lr +Lf ) �2 � 12 7