1.050 Engineering Mechanics I
Summary of variables/concepts
Lecture 27 - 37
1
Variable
Definition
Notes & comments
f (x)
secant
∂f
| (b − a) ≤ f (b) − f (a)
∂x x=a
f (x)
tangent
a
x
b
v r
v r
W d = ξ ⋅ Fd +ξ d ⋅ R
Wd
Ni
ψ i*
ψi
Convexity of a function
Ni =
∂ψ i
∂δ i
δi =
External work
∂ψ i*
∂N i
Free energy and
complementary free energy
Complementary
free energy
ψ i*
1
N1
ψi
Free energy
∑δ N
i
i
=ψ (N i ) + ψ i (δ i )
*
i
δi
δ1
3
N3
2
N2
δ2
P
δ3
ξ0
i
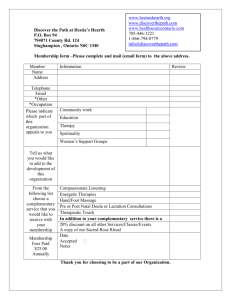
Lectures 27 and 28: Basic concepts: Convexity, external work, free energy,
complementary free energy, introduced initially for truss structures (see schematic
show in the lower right part).
2
Variable
Definition
Notes & comments
Truss problems
(
)
v r !
v r
− ψ * − ξ d ⋅ R =ψ − ξ ⋅ F d
− ε com = ε pot
Complementary
energy
=: ε com
Potential
energy
At elastic solution: Potential
energy is equal to negative of
complementary energy
=: ε pot
Upper/lower bound
⎧ max (− ε com (N , R ) )⎫
⎪⎪ N i' S. A.
⎪⎪
'
'
'
'
− ε com (N i , R ) ≤ ⎨
is equal to
⎬ ≤ ε pot (δ i , ξi )
⎪ min ε (δ ' , ξ ' ) ⎪
Lower bound ⎪
pot
i
i
⎪⎭ Upper bound
⎩ δ i' K. A.
'
i
'
At the solution to the
elasticity problem, the upper
and lower bound coincide
Consequence of convexity of
elastic potentials ψ ,ψ *
Lectures 27 and 28: Introduction to potential energy and complementary energy,
definition at the elastic solution, upper/lower bound, example of energy bounds for
truss structures. The upper/lower bounds of the expressions are a consequence of
the convexity of the elastic potentials (see previous slide).
3
Variable
Definition
Notes & comments
ψ*
Complementary free energy
(1-D)
ψ
Free energy (1-D)
W ,W *
W=
vd r
i ⋅ ξi
∑F
i=1..N
W=
r d rd
i ⋅ ξi
∑R
i=1..N
1 *
(W + W )
2
1
ψ * = (W * + W )
2
1
ε pot = (W * − W )
2
1
ε com = (W − W * )
2
ψ=
Contributions from external
work
Clapeyron’s formulas
Significance: Enables one
calculate free energy,
complementary free energy,
potential energy and
complementary energy
directly from the boundary
conditions (external work),
at the solution (“target”)!
Lectures 27-29: The equations for free energy and complementary free energy for
truss structures are summarized. Lower part: Clapeyron’s formulas, used to
calculate the “target” solution, that is, the results at the solution. These equations
are generally valid, not only for truss structures (but the expressions of how to
calculate the individual terms that appear in these equations are different).
4
Variable
Definition
Notes & comments
⎧ max (− ε com (σ ' ) )⎫
⎪⎪σ ' S. A .
⎪⎪
r
− ε com (σ ' ) ≤ ⎨ is equal to ⎬ ≤ ε pot
(
ξ
')
r
r
σ ' S. A .
ξ ' K.A.
⎪ rmin ε (ξ ' ) ⎪
⎪⎩ ξ ' K . A . pot
⎪⎭
Solution
Lower bound
Upper bound
Potential energy
approach
Complementary energy
approach
Displacement
contribution
r
ε com (σ ' ) = ψ (σ ' ) − W (T d )
r
r
ε pot (ξ ' ) = ψ (ε ' ) − W (ξ d )
*
*
Volume force
contribution
ψ*
ψ
Upper/lower bound for 3D
elasticity problems
⎛
Stress vector
contribution
s2 ⎞
⎟dΩ
2 K G ⎟⎠
Ω ⎝
1
1
s 2 = (σ : σ − 3σ m2 )
σ m = trace(σ )
2
3
1 σ
ψ * = ∫ ⎜⎜ m +
2
1
(Kε v2 + Gε d2 )dΩ
2
1 ⎞
⎛
ε d2 = 2⎜ ε : ε = ε v2 ⎟
ε v = trace(ε )
3 ⎠
⎝
ψ =∫
Ω
Complementary energy and
potential energy
External work contributions
Complementary free energy
(3-D, isotropic material)
Free energy
(3-D, isotropic material)
Lecture 30: Energy bounds for 3D isotropic elasticity. Note that the external
work contribution under force (stress) boundary conditions involves a volume
integral due to the volume forces (gravity). The lower part summarizes the
equations used to calculate the free energy and complementary free energy, as well
as the external work contributions (external work contribution part).
5
Variable
Definition
ψ* =
ψ*
ψ
Notes & comments
⎡ 1 N 2 1 M y2 ⎤
+
⎢
⎥dx
2 ES 2 EI ⎦
x =0.. l ⎣
∫
Complementary free energy
(for beams)
1
⎡1
0 2
0 2⎤
⎢⎣ 2 ES (ε xx ) + 2 EI (ϑ y ) ⎥⎦dx
x = 0.. l
∫
ψ=
Note 1: For 2D, the only
contributions are axial forces
& moments and axial strains
and curvatures
P
δ
l/2
Target solution
ε com =
[
δ = unknown displacement at
point of load application
]
r
r
W * = ∑ ξ d ( xi ) ⋅ R + ω y ( xi ) M y ,R = ∑ ξ xd ( xi ) R x + ξ zd ( xi ) Rz + ω yd ( xi ) M y ,R
W =
[
[
r0 r d
r r
⋅ f ( x )dx + ∑ ξ 0 ⋅ F d ( xi ) + ω y M yd ( xi )
∫ξ
∫ [ξ
x =0.. l
]
External work by prescribed
displacements
i
x = 0.. l
=
Note 2: Target solution using
Clapeyron’s formulas
l/2
1
Pδ
2
i
Free energy (for beams)
0
x
i
]
[
]
f xd ( xi ) + ξ z0 f zd ( xi ) dx + ∑ ξ x0 Fxd ( xi ) + ξ z0 Fzd ( xi ) + ω y M yd ( xi )
i
]
External work by prescribed
force
densities/forces/moments
Lecture 31: How to calculate free energy, complementary energy and external
work for beam structures.
6
Variable
Definition
Notes & comments
⎧ max (− ε com (Fx ' , M y ' ) )⎫
⎪⎪ Fx ',M y 'S. A.
⎪⎪
− ε com (Fx ' , M y ' ) ≤ ⎨
is equal to
⎬ ≤ ε pot (ξ x ' , ω y ' )
ξ x ',,ω y 'K. A.
Fx ',M y 'S. A.
⎪
min ε pot (ξ x ' , ω y ' ) ⎪
⎪⎩ ξ x ',ω y ' K . A.
⎪⎭
Lower bound
Complementary
energy
approach
“Stress approach”
Work with unknown
but S.A. moments and
forces
Solution
Fx ', M y '
that provide absolute
max of − ε com
ξx ' ,ωy '
that provide
absolute
min of ε pot
Upper bound
Potential energy
approach
“Displacement
approach)
Work with unknown
but K.A.
displacements
Step 1: Express target solution (Clapeyron’s formulas) – calculate complementary
energy AT solution
Step 2: Determine reaction forces and reaction moments
Step 3: Determine force and moment distribution, as a function of reaction forces
and reaction moments (need My and N)
Step 4: Express complementary energy as function of reaction forces and reaction
moments (integrate)
Step 5: Minimize complementary energy (take partial derivatives w.r.t. all unknown
reaction forces and reaction moments and set to zero); result: set of unknown
reaction forces and moments that minimize the complementary energy
Step 6: Calculate complementary energy at the minimum (based on resulting forces
and moments obtained in step 5)
Step 7: Make comparison with target solution = find solution displacement
Step-by-step procedure –
how to solve beam
problems with
complementary energy
approach
Lectures 31-32: How to solve beam problems using the complementary approach.
This slide shows the overview over the upper/lower bounds. The lower part
summarizes a step by step procedure of how to solve statically indeterminate beam
problems with a complementary energy approach.
7
Variable
•
Definition
Notes & comments
For any homogeneous beam problem, the minimization of
the complementary energy with respect to all hyperstatic
forces and moments X i = {Ri , M y ,r;i } yields the solution of the
linear elastic beam problem:
∂
(ε com ( X i ) ) = 0
∂X i
1
(W − W * ) ≡ min
ε com ( X i )
Xi
2
Example:
ε com ( R' ) =
1
2 EI
⎛ l3 2 5 3
1 3 2⎞
⎜⎜ R ' − l R ' P +
l P ⎟⎟
24
24
⎝3
⎠
∂ε com ( R' )
=0
∂R '
Hyperstatic force
P
M y (x )
M y (x )
+
ε com
R’
R' =
5
P
16
5
7
l 3P
P) =
16
1536 EI
7
1
5
P) =
l 3P
= P δ ≤ ε com ( R ' =
1536 EI
16
2
ε com ( R ' =
δ =
7
l3P
768 EI
Lectures 31-32: Corollary, how to solve statically indeterminate beam problems
using the complementary approach. Summary of the concept that the minimization
of the complementary energy with respect to hyperstatic forces and moments
provides the exact solution of the linear elastic beam problem.
8
Variable
Definition
Notes & comments
Euler beam buckling
Different boundary
conditions
Example: Euler buckling
of a frame structure
Lectures 33: Buckling of beam structures under compressive load. The lower part
summarizes the experiment presented in class.
9
Variable
Definition
Notes & comments
Properties and
characteristic of instability
phenomenon
Images removed due to copyright restrictions:
photograph of fault line, World Trade Center towers,
shattered wine glass, X-ray of broken bone.
Introduction: Fracture –
application and
phenomena
Lectures 34: Summary – characteristics of buckling phenomenon (equivalency of
divergence of series, nonexistence of solution/bifurcation point/loss of convexity).
Introduction to fracture.
10
Variable
Pmax =
2γ s bEI
l2
Definition
Notes & comments
P
P
P
P
Out-of-plane thickness: b
Useful scaling laws
G = 2γ s
G=−
∂ε pot
∂(lb)
lb = Γ
= unit
crack
area
Griffith condition for
crack initiation
Lectures 34 and 35: Fracture mechanics. The most important concept is the
Griffith condition. The example on the top summarizes the derivation done in class,
representing two beams that are pulled away from each other. This
11
Variable
Definition
Notes & comments
σ0
G = 1.122
σ0 =
πaσ 02
E
= 2γ
a
Fracture in a
continuum
Initial surface crack of
length a
2γE
1.12 2 πa
σ0
Lectures 35: Fracture in continuum. The equations summarized in the left side
provide the energy release rate G for the geometry shown on the right. At the point
of fracture, the energy release rate must equal the surface energy. This condition
can then be used to determine the critical stress at which the structure begins to fail.
12
 0
0