2.094 F E A
advertisement

2.094
FINITE ELEMENT ANALYSIS OF SOLIDS AND FLUIDS
SPRING 2008
Homework 4 - Solution
Instructor:
Assigned:
Due:
Prof. K. J. Bathe
02/28/2008
03/06/2008
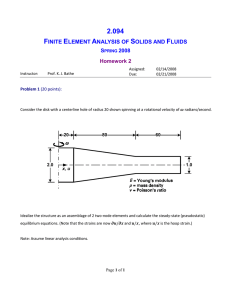
Problem 1 (20 points):
(a)
h5 ( x, y ) =
1
(3 − x)(4 − y 2 ) ;
24
h6 ( x, y ) =
1
(3 + x)(4 − y 2 )
24
h1 ( x, y ) =
1
1
(3 + x)(2 + y ) − h6 ( x, y ) ;
24
2
h2 ( x, y ) =
1
1
(3 − x)(2 + y ) − h5 ( x, y )
24
2
h3 ( x, y ) =
1
1
(3 − x)(2 − y ) − h5 ( x, y ) ;
24
2
h4 ( x, y ) =
1
1
(3 + x)(2 − y ) − h6 ( x, y )
24
2
6
(b) Note that above interpolation functions satisfy
∑ h ( x, y ) = 1
i =1
i
* Rigid body translation in x-direction
u1 = u2 =
6
6
i =1
i =1
= u6 = 2.0 Æ u ( x, y ) = ∑ hi ( x, y )ui = 2.0∑ hi ( x, y ) = 2.0
Æ ε = ⎡⎣ε xx
T
⎡ ∂u
ε yy γ xy ⎤⎦ = ⎢
∂x
⎣
∂v
∂y
∂u ∂v ⎤
+
=0
∂y ∂x ⎥⎦
* Rigid body translation in y-direction
v1 = v2 =
6
6
i =1
i =1
= v6 = 2.0 Æ v( x, y ) = ∑ hi ( x, y )vi = 2.0∑ hi ( x, y ) = 2.0
Æ ε = ⎡⎣ε xx
T
⎡ ∂u
ε yy γ xy ⎤⎦ = ⎢
∂x
Page 1 of 4
⎣
∂v
∂y
∂u ∂v ⎤
+
=0
∂y ∂x ⎥⎦
* Rigid body rotation by 60°
Here we use:
ui = −θ ⋅ yi and vi = θ ⋅ xi ( θ = 60° )
Hence
u ( x, y ) = ∑ hi ( x, y ) { −θ ⋅ yi } = −θ ⋅ y , v( x, y ) = ∑ hi ( x, y ) {θ ⋅ xi } = θ ⋅ x
6
6
i =1
i =1
which corresponds to the rigid body rotation. Also
⎡ ∂u
∂u ∂v ⎤
+
=0
∂y ∂x ⎥⎦
∂v
∂y
ε T = ⎡⎣ε xx ε yy γ xy ⎤⎦ = ⎢
∂x
⎣
Note: The strains used in the class up to now correspond to infinitesimally small displacements and strains.
Therefore we need to use the kinematics corresponding to these assumptions meaning cos θ = 1 and sin θ = θ .
Later on we will allow for large deformations where we need to use cos θ and sin θ , but then we also need to
use the large strain theory.
(c)
⎡ h1 h2
H=⎢
⎣0 0
S
H =H
x =−3
h3
h4
h5
h6
0
0
0
0
0
0
0
0
0
h1 h2
h3
h4
h5
1
1
⎡
⎢ 0 8 y ( y + 2) 8 y ( y − 2) 0
=⎢
⎢0
0
0
0
⎣⎢
1
(4 − y 2 ) 0 0
4
0
0⎤
h6 ⎥⎦
0
( )
S
⎡
T
R S = (0.1P) ⎢ 0
⎣
S
2
3
T
f dS = ∫
S
2
−2
(H )
S
T
S
f (0.1)dy
2
8
⎤
0
0 0 0 0 0 0 0⎥
3
3
⎦
Page 2 of 4
0
1
1
y ( y + 2)
y ( y − 2) 0
8
8
0 0
⎡ P⎤
S
f =⎢ ⎥
⎣0⎦
RS = ∫ H
0
⎤
0⎥
⎥
1
2
(4 − y ) 0 ⎥
4
⎦⎥
0
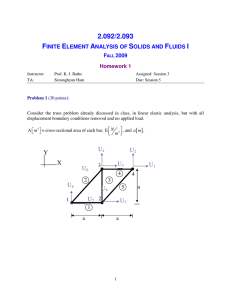
Problem 2 (20 points):
(a)
4
x = ∑ hi (r , s ) xi =
i =1
1
(3 + 13r + s + 3rs )
4
4
y = ∑ hi (r , s ) yi = (1 + 3s + rs )
i =1
Therefore,
⎡ ∂x
⎢ ∂r
J=⎢
⎢ ∂x
⎣⎢ ∂s
∂y ⎤
4s ⎤
∂r ⎥ 1 ⎡13 + 3s
⎥= ⎢
∂y ⎥ 4 ⎣ 1 + 3r 12 + 4r ⎥⎦
∂s ⎦⎥
(b)
⎡ ∂r
⎢ ∂x
−1
J =⎢
⎢ ∂r
⎢⎣ ∂y
∂s ⎤
−4 s ⎤
⎡12 + 4r
1
∂x ⎥
⎥=
⎢
∂s ⎥ 39 + 13r + 8s ⎣ −1 − 3r 13 + 3s ⎥⎦
∂y ⎥⎦
⎡ ∂u ⎤
⎢ ∂x ⎥
⎢
⎥
⎡ ε xx ⎤ ⎢ ∂v ⎥
⎢ ε ⎥ ⎢ ∂y ⎥
⎥ = Bu
ε = ⎢ yy ⎥ = ⎢
⎢ γ xy ⎥ ⎢ ∂u ∂v ⎥
⎢ ⎥ ⎢ ∂y + ∂x ⎥
⎣ε θθ ⎦ ⎢
⎥
⎢ u ⎥
⎢⎣ ( x + 7) ⎥⎦
Page 3 of 4
Therefore,
⎡ ∂h1 ⎤
⎢ ∂x ⎥
⎢
⎥
⎢ 0 ⎥
B u1 = ⎢ ∂h1 ⎥
⎢
⎥
⎢ ∂y ⎥
⎢ h ⎥
⎢ 1 ⎥
⎣ x + 7⎦
where
12 + 4r
1+ r
4s
3 + r + 2s
∂h1 ∂h1 ∂r ∂h1 ∂s 1 + s
=
+
=
−
=
i
i
4 39 + 13r + 8s
4 39 + 13r + 8s 39 + 13r + 8s
∂x ∂r ∂x ∂s ∂x
∂h1 ∂h1 ∂r ∂h1 ∂s
1+ s
1 + 3r
1+ r
13 + 3s
6 + 5r + s
=
+
=−
i
+
i
=
∂y ∂ r ∂ y ∂ s ∂y
4 39 + 13r + 8s
4 39 + 13r + 8s 2(39 + 13r + 8s)
h1
(1 + r )(1 + s )
=
x + 7 31 + 13r + s + 3rs
Page 4 of 4
MIT OpenCourseWare
http://ocw.mit.edu
2.094 Finite Element Analysis of Solids and Fluids II
Spring 2011
For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.