Lecture 6 - Finite Element Solution Process
advertisement

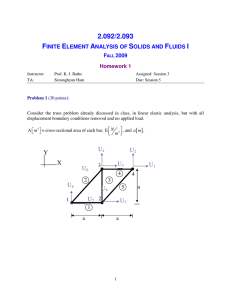
2.092/2.093 — Finite Element Analysis of Solids & Fluids I Fall ‘09 Lecture 6 - Finite Element Solution Process Prof. K. J. Bathe MIT OpenCourseWare In the last lecture, we used the principle of virtual displacements to obtain the following equations: KU = R K = ΣK (m) m ; K (m) � (1) B (m)T C (m) B (m) dV (m) = V (m) R = RB + R S RB = RS = (m) ΣRB m (m) ΣRS m ; ; � (m) RB = (m) RS =Σ H (m)T f B(m) dV (m) V (m) � i i(m) H Sf i(m) Sf T i(m) f Sf i(m) dSf u(m) = ↓ H (m) U (2) ε(m) = B (m) U (3) Note that the dimension of u(m) is in general not the same as the dimension of ε(m) . Example: Static Analysis Reading assignment: Example 4.5 1 Lecture 6 Finite Element Solution Process 2.092/2.093, Fall ‘09 Assume: i. Plane sections remain plane ii. Static analysis → no vibrations/no transient response iii. One-dimensional problem; hence, only one degree of freedom per node Elements 1 and 2 are compatible because they use the same U2 . Next, use a linear interpolation function. ⎡ u(1) (x) = � � 1− x 100 � x 100 � �� H (1) ⎤ U1 0 ⎣ U2 ⎦ � U 3 ⎡ ε(1) (x) = � 1 − 100 � ⎡ � K 100 = E·1· 0 ⎢ ⎢ ⎣ 1 ��100 B (1) 1 − 100 1 100 ⎡ ; u(2) (x) = � ; ε(2) (x) = 0 � = 1 E ⎢ ⎢ −1 100 ⎣ 0 −1 0 1 0 ⎡ 0 0 ⎥ 13E ⎢ ⎥ ⎢ 0 ⎦+ 0 1 3 · 80 ⎣ 0 0 −1 � � ⎤ ⎤ � x x 80 1 − 80 �� H (2) ⎤ U1 ⎣ U2 ⎦ � U 3 � ⎡ � dx + E 0 0 ⎡ � ⎤ U1 0 ⎣ U2 ⎦ � U 3 1 100 0 � � ⎥� ⎥ − 1 ⎦ 100 � 0 80 � 0 1 − 80 �� 1 80 B (2) ⎡ 0 � x 2⎢ ⎢ 1+ −1 40 ⎣ 80 1 80 ⎤ U1 ⎣ U2 ⎦ � U 3 � ⎤ ⎥� ⎥ 0 ⎦ 1 − 80 1 80 � dx ⎤ ⎥ −1 ⎥ ⎦ 1 The “equivalent cross-sectional area” of element 2 is A = areas of the end faces A = 1 and A = 9. 2 13 3 cm2 . This equivalent area must lie between the Lecture 6 Finite Element Solution Process ⎡ K= 2.4 E ⎢ ⎢ −2.4 240 ⎣ 0 −2.4 0 2.092/2.093, Fall ‘09 ⎤ ⎥ −13 ⎥ ⎦ 13 15.4 −13 We note: • Diagonal terms must be positive. If the diagonal terms are zero or negative, then the system is unstable physically. A positive diagonal implies that the degree of freedom has stiffness at that node. • K is symmetric. • K is singular if rigid body motions are possible. To be able to solve the problem, all rigid body modes must be removed by adequately constraining the structure. i.e. K is reduced by applying boundary conditions to the nodes. The K used to solve for U is, then, positive definite (det K > 0). This ensures that the elastic strain energy is positive and nonzero for any displacement field U . In the analysis, each element is in equilibrium under its nodal forces, and each node is in equilibrium when summing element forces and external loads. Homework Problem 2 ⎡ ⎣ εxx εzz ⎤ ⎡ ⎦=⎣ 3 ∂u ∂x u x ⎤ ⎦ Lecture 6 Finite Element Solution Process εzz is frequently called the “hoop strain”, εθθ . 2π(u + x) − 2πx u = x 2πx ⎡ ⎤ E ⎣ 1 ν ⎦ C= 1 − ν2 ν 1 εzz = � � f B = ρω 2 R N/cm3 4 ; R = x 2.092/2.093, Fall ‘09 MIT OpenCourseWare http://ocw.mit.edu 2.092 / 2.093 Finite Element Analysis of Solids and Fluids I Fall 2009 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.