Lecture 5 - The Finite Element Formulation
advertisement

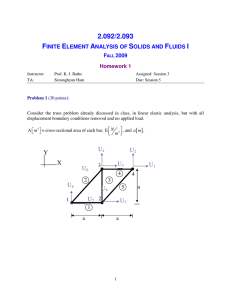
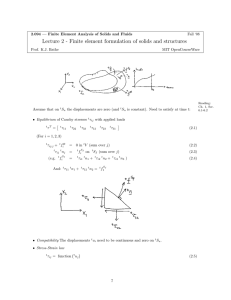
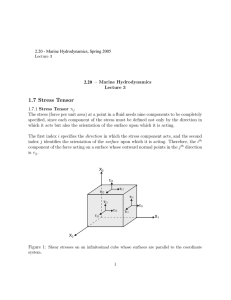
2.092/2.093 — Finite Element Analysis of Solids & Fluids I Fall ‘09 Lecture 5 - The Finite Element Formulation Prof. K. J. Bathe MIT OpenCourseWare In this system, (X, Y, Z) is the global coordinate system, and (x, y, z) is the local coordinate system for the element i. We want to satisfy the following equations: � τij,j + fiB = 0 in V S on Sf τij nj = fi f � � ui = uSu → Equilibrium Conditions → Compatibility Conditions τij = f (εkl ) → Stress-strain Relations i Su (A) Then we have the exact solution. Principle of Virtual Displacements � � T T ε CεdV = V B � uSf T f Sf dSf u f dV + V (B) Sf Here, real stresses (Cε) are in equilibrium with the external forces (f B , f Sf ). Note that Eq. (B) is equivalent to Eq. (A). Recall that we defined � � εxx εyy εzz γxy γyz γzx εT = � � � � ∂u ε̄xx ε̄yy ε̄zz γ̄xy γ̄yz γ̄zx εT = = ... ∂x Basic assumptions: ⎤(m) u(x, y, z) = H (m) û = ⎣ v(x, y, z) ⎦ 3×n n×1 w(x, y, z) ⎡ u(m) 1 (1) Lecture 5 The Finite Element Formulation ⎡ ⎤ u1 ⎢ v1 ⎥ ⎥ ⎢ ⎢ w1 ⎥ ⎥ ⎢ ⎥ ⎢ û = ⎢ ... ⎥ ⎥ ⎢ ⎢ uN ⎥ ⎥ ⎢ ⎣ vN ⎦ wN 2.092/2.093, Fall ‘09 N is the number of nodes (3N = n) and H is the displacement interpolation matrix. For the moment, let’s assume Su = 0. We use � � ûT = u1 u2 u3 . . . un Then, we obtain (m) ε = B 6×1 (m) 6×n û (2) n×1 We also assume ¯ˆ ū(m) = H (m) u (m) ε̄ = B 6×1 (m) 6×n (3) ¯ û (4) n×1 where B is the strain-displacement matrix. Substitute equations (1) through (4) into (B): � Σ ε̄(m)T C (m) ε(m) dV (m) = m V � � i(m) i(m) i(m) Σ ū(m)T f B(m) dV (m) +ΣΣ ūSf T f Sf dSf m mi V (m) where i sums over the element surfaces composing Sf ¯ ˆ u T � � Σ m i(m) Sf . The equation now becomes � B (m)T C (m) B (m) dV (m) û = V (m) T ¯ ˆ u � � Σ m H (m)T f B(m) dV (m) � + ΣΣ mi V (m) i(m) û is the unknown to be found. When evaluated on Sf i(m) ūSf i(m) H Sf i(m) H Sf T i(m) f Sf i(m) Sf � i(m) dSf , i(m) = H Sf ¯ˆ u � = H (m) �S i(m) f With the transformed equation above, we can insert the following � � T ¯ ˆ = 1 0 0 ... 0 → Gives the Let u � � T ¯ ˆ = 0 1 0 ... 0 Then u → Gives the � � T ˆ = 0 0 1 ... 0 Then ū → Gives the . . . and so on. We finally obtain Kû = R. Now, let’s drop off the hat! 2 identity matrices: first equation to solve for second equation third equation (B*) Lecture 5 The Finite Element Formulation K = ΣK (m) m 2.092/2.093, Fall ‘09 KU = R � (m) ; K = B (m)T C (m) B (m) dV (m) V (m) R = RB + R S (m) RB = ΣRB m RS = (m) ΣRS m (m) ; RB ; (m) RS � H (m)T f B(m) dV (m) = V (m) � =Σ i i(m) H Sf T i(m) f Sf i(m) Sf i(m) dSf Example 4.5 Reading assignment: Section 4.2 For this system, we can define U T = [ u1 u2 ⎡ u3 ]. We want to find: ⎤ u1 ⎥ (1) (1) ⎢ u (x) = H ⎣ u2 ⎦ u3 ⎤ u1 ⎢ ⎥ ; u(2) (x) = H (2) ⎣ u2 ⎦ u3 3 ⎡ MIT OpenCourseWare http://ocw.mit.edu 2.092 / 2.093 Finite Element Analysis of Solids and Fluids I Fall 2009 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.