Tchebycheff Approximations by General Spline Functions by LEROY AMUNRUD
advertisement

Tchebycheff Approximations by General Spline Functions
by LEROY AMUNRUD
A thesis submitted to the Graduate Faculty in partial fulfillment of the requirements for the degree of
DOCTOR OF PHILOSOPHY in Mathematics
Montana State University
© Copyright by LEROY AMUNRUD (1968)
Abstract:
This thesis presents a development of the theory of Tchebycheff approximations by polynomials with
imposed boundary conditions and the theory of Tchebycheff approximations by general spline
functions. Existence and characterization theorems are given along with computational procedures and
examples. TCHEBYCHEFF APPROXIMATIONS BY GENERAL SPLINE FUNCTIONS
by
LEROY R E UBEN AMUNRUD
A thesis submitted to the Graduate Faculty in partial
fulfillment of the requirements for the degree
of
DOCTOR OF PHILOSOPHY
in
Mathematics
Approved:
MONTANA S T A T E UNIVERSITY
Bozeman, Montana
A u g u s t, 1968
ill
Acknowledgment
I
am grateful for helpful comments and suggestions from
a number of persons, not a b l y Professors David V. V. Wend,
J. E l d o n W h i t e s i t t , and Johannes C. C., N i t s c h e . I especially
wis h to thank m y major adviser Professor R o bert E. L o w n e y for
his patience and able assistance.
This a cknowledgment w o u l d
not be complete without m e n t i o n i n g the w o r k of Dixie Swa n s o n
w h o typed the manuscript so efficiently.
iv
Table of Contents
S e c tion
Vita
Acknowledgment
iii
List of Tables
v
Lis t of Figures
Abstract
1
Introduction
2
Tchebycheff T h eory W i t h Imposed
B o u n d a r y Conditions
3
vi
vii
I
3
Spline Function A p p r o x i m a t i o n W i t h
the J o i n Points G i v e n
.
ii
17
Spline Function Approximations W i t h
Variable J o i n Points
5
19
C h aracterization of Best Spli n e .
Approximations
33
6
Computational Procedure
36
7
Examples
37
Literature Cited
4l
V
List of Tables
Table I
G eneral Spline F u n c t i o n Approximations
of ex on [0,1]
39
List of Figures
Figure I.
F a m i l y of lines of best approxi m a t i o n
Figure 2 .
Illustration of a non-unique solution
Figure 3 .
E r r o r curves
vii
Abstract
This thesis presents a development of the theory of
Tchebycheff approximations b y polynomials w i t h i mposed
boundary conditions and the theory of Tchebycheff a p p r o x ­
imations b y general spline f u n c t i o n s .
Existence and c h a r ­
acterization theorems are g i v e n along w i t h computational
procedures and examples.
I.
Introduction
A p r o b l e m encountered r e p e atedly In scientific research
is the following:
G i v e n a function f(x), a n orm | | • | | > and a class
S of admissible approximating functions,
find a
f u n ction P(x) e S such that ||f (x) - P(x)||
is a
,-minimum.
The function w h i c h is to be approximated m a y be g i v e n in m a n y
I
different ways.
For example, the f u n c t i o n m a y be a c o n t i n ­
uous function defined b y a slowly converging p o w e r series or
it m a y be a discrete function defined as the n umerical s o l ­
u t i o n of a differential equation.
The characteristics of
the function f(x) and the i n t ended use of the ap p r o x i m a t i o n
influence the choice of the n o r m and the class of admissible
approximating functions.
A desirable norm i n m a n y applications, is the T c h e b y c h e f f
no r m (called the Hw n orm in the discrete case, the u n i f o r m
n o r m in the continuous case)
’
described by
IIX*! I - Sup ( IX *
xel
where I is some g i v e n set of points.
(x)|)
Tcheb y c h e f f
[12 ] and
dLe la Vall£e Poussin [8] deve l o p e d m u c h of the early theory
associated wit h this norm.
[3 ], P. C , Curtis, Jr,
[5 ], C. W,
In the pas t f e w years E. K. B l u m
[7 ], E. W.
Clenshaw [6], J.
Cheney [5 ], A. A. G o l d s t e i n
C. C. Nitsche
[10 ], and m a n y
others have mad e contributions to the advanc e m e n t of this
2
theory.
Als o i n a recent p u b l i c a t i o n [9 ] C. L. L a w s o n p r e ­
sents characterization theorems and solution procedures
associated w i t h the p r o b l e m of p a r t i tioning an interval such
that the largest error i n c urred in approximating a continuous
function b y separate polynomials or rational forms on each
subinterval is minimized.
This type of approximation,
i.e.
one in which different approximating functions are use d on
different subintervals of the argument domain,
segmented approximation.
tervals are not specified,
is called a
If the end points of the su b i n ­
the pro b l e m of finding the "best"
segmented approximating f u n ction is more c o mplicated than
the standard fixed interval approx i m a t i o n p r o b l e m due to the
added difficulty of finding the optimum set of end points
for the subintervals.
However,
the i n c r e a s e d p r e c i s i o n of a
segmented a p p roximation often justifies the additional work.
A logical extension of L a w s o n ’s type of approx i m a t i o n
is to require that the approximating f u n c t i o n be continuous
or have derivatives up through some order at the end points
of the s u b i n t e r v a l s ,
One class of functions of this type
is the class of general spline functions.
.Definition I.
Let v
,v g ,
62 = d2 =
,Vjc be non-negative integers and
e * *
§ Ojc be a set of p o ints in [a,p ]..
3
A function s ^ x )
i)
which satisfies the conditions:
sk (x) is a polynomial in x on each subinterval
C6 •£.j <3
ii)
iii)
I .> ** ~ I j2 5
sk (x) is continuous
jk —I # and Cd
3>
on [a, P ],
sk (x) has derivatives up through order v r at
5 j r ~ I ^2 j ...
*
«
is called a general spline f u n c t i o n .
The points
S 1 Jfig5 ...,6k are called the join points of sk ( x ) .
F or a definition of a spline function and other associated
definitions see
[1] , [2] "and [11].
The purpose of this thesis is to p resent c h a r a c t e r i ­
zation theorems and solution procedures associated with
Tchebycheff approximations where the class of approximating
functions is the class of g e n e r a l spline functions.
Basic
to the theory of Tchebycheff approximations by general spline
functions is the theory of Tchebycheff approximations b y
polynomials w i t h imposed b o u n d a r y conditions.
this theory is developed first.
Consequently
It should be n o t e d that all
polynomials use d i n the following discussions are real
polynomials.
2o
Tchebycheff Theory Wit h Imposed B o u n d a r y Conditions
In order to simplify the notation,
the zero derivative
of a function shall be u sed to designate the f u n c t i o n itself.
4
Le m m a I.
(Existence Lemma)
Let f be a continuous real valued function defined on the
n on-degen e r a t e :interval
]j and let f have derivatives
up through some order v ^ 0 at some fixed point 5 in [ a^p].
Let n be a non-negative integer such that n g v .
Then there
exists a polynomial Pn (x) w h i c h has the same values for its
derivatives up through order v as f has at 3, is of degree
less than or equal to n, and is a best a p p r o x i m a t i o n in the
sense of the Tchebycheff n o r m relative to the conditions
imposed on the derivatives at 5.
Proof:
Let Pn (x) be given b y
n
and let
The polynomial P (x) must satisfy the conditions
m — 0^1^2^
mm•
denotes the m^^1 derivative of f (x)
where
If one sets 5® = I even w h e n 5 is zero.
then this system of equations can be w r i t t e n i n the f o r m
n
5
I n this system of equations,
the coefficient m a t r i x A of
X q A i **** A v is u p p e r triangular and has n o n -zero elements
o n its diagonal.
Such a m a t r i x is n o n - s i n g u l a r .
Consequently
this system of (v H- I) equations can be u sed to express
Xq A p
••- A v as continuous functions of the remaining
's.
That is
Pn (x) = B q + a^x -hi..
+ a^x^' + Xv ^ ^ ^ * * *•
'
where from the form of A it follows that each a. can be
V
w r i t t e n in the form
v
n
E
+ i=V+l kj£X£ 5
aj “ A
Here each
is a c o n s t a n t .
J
— 0 ^I 3 , • • 3 V
Thus each a^ is also of the
form
0 1
Z
= K j + £ =V
H-I kM X£ ’
where each
,
.
is a constant.
Consider the function * defined b y
V
v-ra.
If
VTc
_
11
^ +I
_ ^ jJx ^ll
J=O a v-}x ^ ” j.=v
First it will be shown that f Is a, continuous f u n c t i o n of
the vector argument X = (^v +! A v + 2 * * * *x n) *
v
n
|^(X ')-^(X )I
=
||f(x)- Z
j=0
a ’xj J
v
Z
M iX0 I j
J=VH-I J
n
- ||f(x)- Z
a .X0- Z X A j I |
J=O
0
J=VH-I 0
C1 )
6
Hence
l ^ ( X ' )~X(X)I
S || Z
(a^-a.)xJ +
j=0
Z _(Xj-Xj)Xj
j =v +1
max
S O g g g v - I I a'-a J ^ X J - X i If
2 I IX j | |
v -Hgign
I j j
/ j =0
9* ’
Ea c h ai is a continuous f u n ction of
a^
J
a •ji j —
rd |
I|,
Furthermore each ||xv
as X * —*■ X
J
j = 0 ,1 ,...,n is bounded.
Thus
e
This completes the p r o o f that ^(x)
is a continuous function of x.
Compare this p r o o f w i t h that
on page 130 of [13 ]Now either v is equal to n or v is less tha n n.
sider first the case where v is equal to n.
Pn W
"
2
j=0
Con­
Then
a .Xt-
J
where each a. is u n i quely determined.
C o n s e quently there is
one and only one polynomial w h i c h satisfies the g i v e n c o n ­
ditions,
and for this case the lemma is seen to be true.
Next let v be less than n.
It follows f rom the c o n t i n ­
uit y proof g i v e n above that for the continuous f u n ction
E
j=0
KjXj
j
Z
<p
K 1Xj-
Z
a .X1
j=0
J=O
X .Xt
Z
j=v+l
n
-
Z
Z
J=O I=V-KL
K 11X
^
Z X^X'
j =v +1 ^
7
is a continuous function of X .
xv+l +
The shell
• • • > xn ” 1
is a bounded,
closed (compact)
sional space,
and on it the continuous f u n c t i o n q> mus t assume
a minimum a.
Since a norm b y definition is always greater
than or equal to zero, a g o .
linearly independent.
set in ordinary (n- v ) dimen-
2
The functions l,x,x ,...
are
Thus, if at least one of the X 1 1S,
j = v 4-1 ,...,n is not zero, then o ^ 0 .
It follows, b y the
homogeneity of tp, that for any (Xv + i^Xv + 2# • • • A n ) wit h at
least one n o n -zero component.
cp g a
J x v- + i + . . . + Xn > O
Let p be the lower bo u n d of i//(x.).
p g 0.
T h e n it is true that
N o w one only needs to show that this bound is
attained.
That is, one only needs to show that there exists
a X * such that
V(X*)
(2)
= P
Assume that
n
v
L
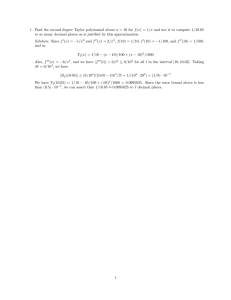
X? > R = (p + I + I If(x)
j=v+l J
- ,Z
j=0
Then
V/(X) = j |f(x)
-
Z
a .xj Z
X 1X j
j=0
j=v+l
K 1X j I \)/0
^
■
•
8
^ ( X) — | I f ( x )
”
Z/
j==0
v
(K' +
**
l=v+l
) x J **
^
Xjx I I
j=v+l J
n
n
■ m | |- Z
2
Z
2 _ k j ^ X ^ x j - 2 ^ j x 4 ||-||f(x)-. 2%KjxJ|
J=O
J=O I = V + !
j= v + l
v
v
xJ
I f(x)r jU
=: o(p + i + I|f(x)- Z , K .1X
j|
I ID)/a-|
Za-Hf
( X ) - Z kK 1X
J=O
^
J=O J
= p + I
Hence the lower bound of f{\)? for all-X 5 is the same as the
lower bound w h e n X is restricted b y
this sphere is closed and bounded,
attained,
. _
t/ Z
J=v +1 J
g R.
Since
the lower b o u n d is
and the existence of x * is established.
This lemma c a n be g e neralized to include the case where
the derivatives up through order v^ are g i v e n at one point
6 j € [a,P ] and up through order Vg at a second point
6g e [a,P ], p r o v i d e d the degree n ' of the p o l y n o m i a l satisfies
the relation n g v^ + Vg + I.
The only m o d i f i c a t i o n required
is that the argument associated wit h the m a t r i x A m u s t be
applied twice, first at
zero is involved,
set
= 0)
and secondly at gg, where the form of the m a t r i x is slightly
different.
In fact this lemma can be genera l i z e d to include
any finite number of points at w h i c h conditions are imposed.
A l s o one could allow the constants,
C q ,C^,-. .. ,Cv , to be
9
chosen arbitrarily rather t h a n being chos e n equal to d e r i v ­
atives of the function f .
This last g e n e r a l i z a t i o n would
require no changes in the p r o o f of the lemma.
When the conditions on the derivatives are imposed at
an end point of the interval
[a,P ], then the imposed c o n d i ­
tions shall be called b o u n d a r y c o n d i t i o n s .
boundary conditions,
In the case of
the next two lemmas give a c h a r a c t e r i ­
zation of the solution whose existence was e s tablished in
lemma I.
Definition 2 .
Let f (x) be a continuous f u n ction on [ a , p ], n be a
non-negative integer, Q n (x) be a po l y n o m i a l of degree
.•
less tha n or equal to n and let
.
■-
max
a g x g p I f (x) - Q
Consider a set of points
a 5 X 1 ^ Xg
... <( x-y 5 P
subject to the conditions that
i)
Jf(X1 ) - Qn (X1 ) I - p Q (f),
i - 1 ,2 , . ..,V
and
The m a x i m u m number of points X 1 w h i c h can be made to
satisfy these two conditions is c a lled the o s cillation
number of (f (x) - Q,n (x)) and is ,designated V(f - Q n ) .
I
10
If the number of
c a n be made large wit h o u t bound,
then one writes
V(f ~ Q n ) = co
Lemma 2 .
Let n,
and V 2 be non-negative integers wit h n 5 Vj+Vg+l.
Let Pn (x) be a polynomial of degree n or less w i t h p r e s c r i b e d
values for its derivatives of order less t han or equal to
Vj at a and Vg at p.
set Vj(Vg)
equal to -I.
CL
be
If no values are p r e s c r i b e d at a (P)
Let v = Vj + V g and let
Xj = Xg ~ X 3 =
(n-v) p o ints in the interval
... 5 X n _v
(a,P).
P
(When Vj = -I include
a in the interval and w h e n Vg = -I include p.)
If the d i f ­
ference
g(x) = f (x) - Pn (x)
has the values
g(Xi)
— e (-1)'
'yj, 'yj /■ 0,
e = I if g(Xj)> 0 , or
i = 1, 2 , . . . , n-v,
and
e- = -I if g ( X j ) .< O y
th e n for any p o l y nomial Q n (x) of degree n or less wit h prescribed values for all derivatives up through Vj at a and up
through v p at p ,
Proof:
Assume the
nomial rn (x) of
lemma is false.
T hen
there exists a p o l y ­
degree n or less wh i c h satisfies the g i v e n
.
11
bound a r y conditions and such that
max
x I s x s x n-v
f(x)-rn(x) < ndn (7 l,7g,...,7n_v )
Consider the polynomial
A(x)
« rn (x)-Pn (x) = (f (x)-Pn (x)) - (f(x)-rn (x))
At the (n-v) points, x i^x 2^ • • • ^x U-V 5
same as the sign of f (x) - Pn ( x ) .
zeros in the interval
M x)is the
siSn
Thus A(x)
has
(n-v- 1 )
(ex,(3 ) (possibly including a and/or P ).
Furthermore A(x) has a zero of order (v-^+l) at a and (vg+l)
at p.
val
Consequently A(x) mus t have
(n+ 1 ) zeros in the i n t e r ­
[a,^], wh i c h is a contradiction.
Lemma 3 .
Using the n o t ation of
(I) and (2 ) i n t r oduced in the
proof of lemma I, let
y(\*) = p
and let n,
and Vg be non-negative integers such that
v I + v 2 = v g n-1 .
Assume there exists a p o l y nomial En (x)
of best approximation of degree less than or equal to n w ith
prescribed values for its derivatives
than or equal to
of each order less
at a and less than or equal to V g at p ,
and such that if p > 0 and
§ 0, it is true that
If (a) - Bn(a)| < p
(3 )
and if p > O and Vp = 0, it is true that
|f(p)
- En (p)| <
p
(4 )
The n En (x) is unique and is completely charac t e r i z e d b y the
12
property that the oscillation number satisfies the i n e q uality
V(f(x)
- $n (x)) 5 n - v .
Proof;
Assume V(f(x)
« P (x)) ^ n - v .
u
If p m
n
(f) is zero,
$n (x) is c ertainly a polynomial of best, approximation,
pm
(f) is not zero,
then
If
then i n lemma 2 let
7 i ~ Pjp (f)
n
= Pe
n
(f )
Tn^v = PE
T h e n it follows that for any polynomial Q n (x)
Po
(^) = P e yi
Thus
P E (f) = P
n
Assume V(f(x)
- Efi(x ) ) g n - v -1 and that En (x) is a p o l y ­
nomial of best approximation relative to the conditions
imposed on the d e r i v a t i v e s .
cases;
There are o n l y two p o s sible
either f (x) is a polynomial of degree less than or
equal to n with the pre s c r i b e d values for its derivatives or
it is not.
Case I
Let f(x) be a polynomial of degree less tha n or equal to
n having the p r e s cribed v a l u e s for its derivatives.
For
13
this function p = 0 .
In order for V(f (x) - 3?n ( x ) ) to be less
t I (x) cannot be identically f ( x ) .
tha n n-v
Thus
Pj> (^) > P
n
and I?n (x) is not a polynomial of best approximation.
Case II
Assume f (x) is not a p o l y nomial of degree less t h a n or
equal to n having the pr e s c r i b e d values for its d e r i v a t i v e s .
I n this case p ^ 0 .
Subdivide the interval f r o m a to p> into the intervals
[u Q >U 1 ] > [U 1 jUg ] ) • « •
so small that the oscillation (maximum minus the minimum)
of
[ f (x) - $n ( x ) ] in each subinterval is less than or equal to
2 P g (f)•
(This is possible in that a f u n c t i o n w h i c h is
n
continuous on a closed, b o u n d e d set is u n i f o r m l y continuous
there.)
If If(x)
- En (x)|
= p p (f) in the interval
n
O k ,uk + 1 ],
the interval .[uk juk + 1 ] is called a d i s tinguished interval.
Label each such interval + or - according as
(f(x)
- l?n ( x ) )
is positive or negative respectively.
Label the distinguished intervals D 1, D g .......
order.
Without loss of g e n e r a l i t y assume D 1 is +.
in
S t a rting
w i t h D1 p r o c e e d through the distinguished intervals until
the first - distinguished interval is encountered.
Call
14
this group of + distinguished intervals group I.
Starting
with the first encountered ~ distinguished interval p r o c e e d
Until the next + distinguished interval is encountered.
Call this group of ~ distinguished intervals group 2 , and
Since V(f - En ) is g n - v - 1 , the
continue in this fashion.
total number of groups, T, is less than or equal to (n-v-1).
Construct a polynomial r(x)
of degree n wh i c h is negative in
the intervals of group I, positive in the intervals of group
2, etc . , and such that the derivatives of r (x) are zero at
a up to order
and at (3 up to order V g .
Consider the polynomial
Q n (x) =• En (x) - e r(x)
for an arbitrary e > 0 .
If e is chosen sufficiently s m a l l >
Q n (x) is a b e tter fitting p o l y nomial tha n En (x), and also
satisfies the conditions imposed at the b o u n d a r i e s .
This
contradicts the assumption that En (x) is a b est fitting
polynomial.
To prove the uniqueness of the best a p p roximating p o l y ­
nomial,
assume there exist two polynomials of best a p p r o x ­
imation En (x) and Q * ( x ) .
Consider the p o l y nomial
cp(x) = § [ E n (x) + Q*(x) ]
cp (x) is also a polynomial of best approximation,
the boundary conditions.
and satisfies
Thus f rom the first- p a r t of this
lemma, it m ust have an o s cillation number g
(n - v ).
From
15
this it follows that E (x) = Q*(x)
Furthermore they have the same
at (n~v) i n t e r i o r points.
(v+ 2 ) conditions imposed u p o n
theiif derivatives at the b o u n d a r y points.
This implies that
$n (x) s Q*(x)
Thus the solution is u n i q u e .
If a b o u n d a r y condition is imposed at a b o u n d a r y point
<5 such that
If(<5) - sn (<5)| = p
then the polynomial of best ap p r o x i m a t i o n En (x) m a y not be
unique.
For example if
f(x) = -X2 ,
x e [-1 ,0 ]
and if a first degree approximating p o l y nomial m ust have the
value 10 at x = 0, then any p o l y nomial of the for m
E1 (X) = cx + 1 0 j
1.0 s c 5 21.0
is a polynomial of best a p p roximation relative to the i m ­
p o s e d conditions.
See figure I.
It should be noted that 'this ^non-unique ness can never
occur whe n the b o u ndary conditions require the approximating
polynomial to have the same value as the g i v e n f u n c t i o n at
the boundary points.
ditions
(3 ) and
For i n this case either p = 0 or c o n ­
(4 ) of le m m a 3 are satisfied.
16
Lines of best
a p p roximation
Figure I.
Family of lines of best approx i m a t i o n
17
3^
Spline F u n c t i o n Ap p r o x i m a t i o n with the J o i n Points G i v e n ■
Theorem I.
Let nQ ,n ^ ,. , . 5nk and v-, , V g 5 .. . ,Vlc be n o n - n egative i n ­
tegers with nQ m V i j
n^ s
v
n r > v r + v r+1+ I, r = l > 2 , . . . , k - l , ‘and ,
Let f be a continuous real v a lued f u n c t i o n on the
non-degenerate interval
[a,P ] with
(bounded) values for its
derivatives up through order v ]_»v 2 5 • • • »v k
fixed join points a 5 S 1 < 6 2 <
the respective
• • • < Sjc = P •
Let S be the
class of general spline functions wh i c h have the same values
for their derivatives as f at 6^362 * ‘ ‘5^ k and are
degree
less than or equal to n0 on [Ct5S 1 Ii to n r on [sr iSr + 1 ]5
r = 1 ,2 ,...,k- 1 , and to n^ on [a^,p],
T h e n there exists an
•
Sk (X) e S w h i c h makes the Tchebycheff nor m | |f (x) - s^(x)||
a minimum.
Furthermore, if it is required that s^(x) be a
best approximation on each subinterval,
then s^(x) is unique
and is completely characterized b y the p r o p e r t y that the
oscillation number V(f(x)
- s^(x)) is at least as large as
n 0 - V i + ! on [a,fl], n r - v r - v r+1 on [6r ,sr + 1 ],
r = 1,2,.. . ,k-1, and n k - v k + I on [ak ,p].
Proof:
The direct application of the gener a l i z e d form of lemma I
and lemma 3 to each of the intervals
proves the theorem.
Ca5S 1 ], Cs1 Jd2 I* • • ‘ •>
I
18
Corollary I.
Let n Q»n i > • • • and
>vk be non-negative i n ­
tegers with nQ s V 1 , n r g v r + v r+1 + 1, r = 1,2,... ,k-1, and
nk g v k .
Let f be a continuous real valued f u n ction on the,
non-degene rate interval [a ,(3] „
Let S be the class of general
spline functions which have the same p r e s c r i b e d values for
their derivatives up through order ^ 1 ,V2 ,... ,vk at the r e s ­
pective fixed join points a g ^ 1 < a 2 <
... < 6 k ^ P j and are
of degree less than or equal to n 0 on [C^s1 ], to n r on
Cdr ^ r + ! ^
r ~ l j 2 ,...,k-l,
and to n R on [ak ,p].
T h e n there
exists an sk (x) e S which makes the Tchebycheff n o r m
I I f (x) - sk (x)I I a minimum.
Furthermore,
if it is required
that sk (x) be a best a p p roximation on e a c h .subinterval,
if the max i m u m value of |f (x) - sk (x)|
and
on each subinterval
[<5r j6r+i ] does not occur at either of the join points a r or
6 r+i, then sk (x) is unique on the interval
[6r j6r+]J and
completely characterized b y the p r o p e r t y that on [6r ,sr + 1 ],
V(f(x)
- sk (x)) = n r ” v r -
m a x i m u m value of |f(x)
r = 1 ,2 , . ..,k- 1 .
If the
- sk (x)| on [a,S 1 ] does not occur at
^ 1 , then sk (x) is unique on [Ojfi1 ] and co m p l e t e l y c h a r a c t e r ­
ized by the p r o p e r t y that on [Ojfi1 ], V(f(x)
- sk (x)) g no"‘v l +:L
Al s o if the m a x i m u m value of jf (x) - sk (x)|
on [fik ,p] does
not occur at fik , then sk (x) is unique on [fik jP] and c o m p letely
characterized b y the p r o p e r t y that on [fik ,p],
V(f(x)
- sk (x)) = 0 % - V k + I,
19
4.
Spline F u n c t i o n Approximations W i t h V a r i able J o i n Points
Theorem 2 .
Let f he a continuous real v a lued function on the nondegenerate interval
[a, P ] and let f possess b o u n d e d values
for its derivatives up through some order v on [ a > p ].
Let
IJL1 JtJL2 S • • * j|ik and nQ,n^,... ,n^ be finite sets of non-negative
integers with
I)
max
i
2)
nO =
max
I [X1
3)
nk =
max
i ^i
4)
n
Hi g v
max
§ i jJ
(|ij
|jl j + I ) s
— I s 2 j • • •j k - 1 .
Let V 1 J^2 ,...,V^ be an arbitrary p e r m u t a t i o n of Ijl1
Let S = Sfv1 JV2 ,
.
be the class of all general spline
functions w h i c h (a) have j oin points G 1 Jd2 , . . . ,6%; arbit r a r i l y
selected fro m the interval
[a,p] and la b e l e d such that
dj £ G 2 = •.• § G k , (b) have the same derivatives as f up
through order V i j V 2 , ...,v^ at the respective joi n points
Gi j G2 J
,Gk* and (c ) are
degree less tha n or equal to n Q
on O j G 1 ] j to n r on U r Jdr t i ], r = 1,2,.. . ,k-1, and to n k on
Cdk Jp]*
Then among all functions in S there is at least one
function sk such that | jf - s^j | is a minimum.
Furthermore,
.
20
among all possible permutations of
** ‘
there exists
at least one p e r m u t a t i o n w h i c h makes this T c hebycheff n o r m
a minimum.,
*
It should be noted that in this theorem the n orm
Ijf - S lcII is a function of the join points S},562» • • •
[ a , P ] and the coefficients of the general spline f u n c t i o n s^.
Proof:
Let an arbitrary general spline f u n c t i o n sk be described
In order to simplify the notation, let 6 0 = a,
n =
= P j
max
(n„)and let x . be defined by:
0 5 r < k
r
J
Vr,j w h e n <5r S x §
d. = 0 , 1 , 2 , . . . , n r
r = 0,1,.
(6)
0
w h e n <5r § x s 6 r + 1 j j = n r + 1 J
\
r = 0,1,.
21
It should be noted that for each fixed value of r,
H o w e v e r > for x = 6 r >-r = l* 2 *..;,k>
unique.
is
there are at
least two possible choices for Xj wh i c h are consistent with
(5 )«.
Using this notation one has
n
sk (x) = Z X 1X j
K
j=0
0
The sk (x) must satisfy the conditions:
(m l )
Sk
(m i )
(di) ~ f
(dj)
— 0 ,1 ,23 ...
I = l,2,...,k
For i = I this system of equations is of the form:
Z
Xq
Z
11O
1O
1«
X d ^ T T
J=V1
J v
-jd^ - f(d%)
“1
jxo,j6 i 1 = f ’(6 i ) ’
vr
i
X^
'J-Vl
x O 1J6 I
J<o j X i >d6 i 1
(V1 ) z
f'(dl)
-
(6 l)'
■1!
'
J - vI
J vl }
T F t i j T T x I 1J6 I
1 - f
^ <6 i)
A similar set of equations exists for i = 2 ,3 ,t,.,k.
(7 )
22
This complete system of equations can be use d to e l i m i n ­
ate V 1 + I of the X 0 j's, V 1 + Vg +'2 of the
^j 1s » *••»
v k-l ^ v k * 2 of the X k ^l 5 j ’s and v k + I of the X k ^ j 's.
Thus
Sw (X) can be w r i t t e n in the f orm
nr
Sk(X) = a r,0 + a r,lx + ••• + a r,n x
6r = x 5 5
for
O ^ l j •#•,k
J
where each a_ < is a rational f u n ction of the remaining X _
coefficients and the join points <5r and a r+1 •
<
Because of
the form of the system of equations and the coefficient
matrix
(See the description of m a t r i x A i n lemma I.) it is
easy to show that each a
. is also homogeneous of degree
one, in the X r j's that appear, w ith the e xception of one
te r m which is only a function of the join points.
,j +
+1 kO llM
xC M 1
That is
3 - 0,1,..
0,j
Q^j
j
j - V 1 + 1, V 1 + 2, . . .,n^.
n.„
ZK r,j + , J 1h ,
J;rJJ Jj!x r1£ ’1-9 ’1 ’'’-,vr+vr+l+1
* r r+1
r,j
X r,
for r - 1, 2,...,k-1, and
J = v r + v r+1 + 2 , . .., n
23
0 j l 5 « •«1^V i
»k,j *
^ k 5J 9
^ ~ vk + 1^ k
where each K„ , and each k_ , ,, r
*>}O
^ 5U 5*
+ 25 *’ * •*n k
0 , 1 , 2 , . . . ,k, is a
rational function of 6 r and 6 r+ ^ only.
previously i n t r oduced in (6),
s^(x) can be w r i t t e n
-e_
i
a> X u
Z
sk (x) =
Using the n o t a t i o n
j=0
Now let the f u n ction f be defined by
^ X 0, v 3 + 1 * 6 e * 'X 0
,
’ • * 'x k , v k+l' * * * ,xk, ^ ' 6 I 5S a 5 • * * 5<5k):
=
I |f(x)
“ S k (X)I I
n
max
a 5 x < p f(x)
Define co to be the vector w i t h n components
and o/ the vector w i t h n components
q v
ZVl
J=O
(X0 ,v + I 3 *" * ,<5k^
•*6 \ ) •
The n
the continuity of ip' will be established if it can be shown
that ITp(co7) - ^(o))|
0
as
j |d)/ - ojj | -> 0 (Tcheb y c h e f f n o r m ) .
Two cases will now be examined:
w h i c h no two J o i n points
Case I, the case in
S i , 6 j are equal,
and Case II, the
case in wh i c h at least two J o i n points are equal.
is true, then a s dj < Sg <
w Vo,
• •• < 6 k =
it must be true that d' T
If Case I
In the limit as
6r> r = 1 ,2 ,... ,k.
First
24
for an arbitrary r, assume
\6'v - 6 r l and
g 6r-
Let
- 6 r_il j :
- 6 r+1\ all be so small that 6 ^ < 6 T '
+ 1>
6^, < 6 r+1 and a r 'a < a r .
Next designate the general spline
function associated with the vectors to and <oz b y s^(x)
s£(x) respectively.
(%)
and ,
Then for any x e Cdr JdJ]
2
i. •?
a^X
Z
j=0 arjdX"
j=0
Jr-1
sj(x)
Z
=
F or fixed to,
Z
a
j=0
of x.
Z
a'.x0’ =
j=o
j=0
ar-l,jxJ
.x*3’ is a continuous
* >U
(polynomial)
Thus it follows that
J 0 a r , J xd = J 0 a r » j ( 6 r ) ; l + E r
where e
-+• 0 as x -> d r •
n r->l
"-I
J 0
where
S imilarly
^ - 1 » ^
0 as x -» d r ‘
nr
J o V j ^ r ^
■ j?0
(«r)J
But
n r-l
= J o
(6r )J
function
25
Thus for
x e Cdr^ ]
nr
Z
a.xa =
a
> J
j=0
1x J
Ii
nr
' n r~l
a Ixa =
j=0) a
When 3 ' < 6
Z
j%)
a' T 4X<3
1,0
r-
and | |a/ - a)j | is sufficiently small,
one obtains
for x € [
"r-l
»
0=0
Z.
0=0
ar-i,jx° =
2 a r,dxd + G r " € r*
j=0
n
n
S a'xJ = Z a 'r, j‘
.,xa‘
0=0
where e r
j=0
0 and
N o w for :c e
0 as a'
[max(ar„136^ 1)imin(ar,aP ]
J0
^ d xd = J 0
n
Z
0=0
and for
ar«
a r -1 ^ x °
n r~l
=
2_
0=0
■
a r~l, jxJ"
•c e [max(ar , d P jmin(ar + 1 ,dp+ 1 ) ]
Z
d=0
a .xa
0
= Z
J=O
a
.X1
r,J
nr
Z a'.xa =s Z a'
^.Xt
j =0 r,0
0=0
•i
26
Furthermore,
f rom the properties of a n o r m it follows that
I* ( « > ' ) =
Il
llf-ayi
™ IIf - sItII
= I I sk ” skl I
2
(t; - I j x d II
j=0
Thus for all x e [a,P],
11
.2 (aj - aj ) * J l I
j=0
max
r,j
Ilxj
+ 2 m^ x
( max{l € IJ e ^ lJ e r IJe * 4 )
E a c h a.' . is a continuous function of its arguments.
the limit-as m'
o>> each
Als o each T r > e p
ar
and e** approaches zero as o/ -» cd.
Thus in
ir
This shows that ^(cb) '.Is
a continuous function of w on a subspace E of E u c l i d e a n
n-space in Case I.
N ow consider Case II.
points S 1 Jd2 511 1 ^ k
If any two or mor e of the j oin
are the same point T, the n in a suffi­
ciently small neighborhood of a the continuous spline .
functions sk (x) and s^(x)
satisfy the relation
f (d ) == sJcCx ) + S1 = sJcCx ) + e 2
where T 1 -> 0 and T g -> 0 as x
T«
Let T 1 ^T2 J • • • >6 s be the
components of co which are equal to T j and let S 1 JS2 J ••• j<5g
be the corresponding components of u / .
If x e CminT1 Jmaxg1 ],
then E1 and e2 can be mad e a r bitrarily small b y m a k i n g
m a x IT 1 - Tl
sufficiently small.
But this implies that
27
as co/
oij .
X €
m a x __
, __
[min 6 ^, max
Thus the continuity of y/(u)) is not destroyed at a point
where two or more join points are e q u a l ,
the other points x in the interval
Case I covers all
[a,p ]..
C o n s e quently ^(co)
is also a continuous function in Case II.
Recall E is the subspace of E u c l i d e a n n - space such that
if oi' e I,
then a s
^ d2 =
••• = 6lc S P-
lower bound of t//(co) for o> e E.
Let p be the
T hen p.• • ' 0 , Now one only
needs to show that there exists an- co* e E such that ^ (ay*) * p
The following two cases will be discussed in order:
(I)
All coefficients X r j are determined b y the
joi n conditions.
(il)
There is at least one X r ^ coefficient which
is not determined b y the joi n conditions.
In the first case y/(a>) is only a f u n ction of the join
each & ^ ^ r — 1 ^2 ^
point s
.
s at i s fie s
a S <5r_i ^ 6 r = 6 r+i g P, it follows from the co n t i n u i t y of
^(co) that there exists a set of join points 62.IS62*5 * * * *6 k*
such that
..i
= p.
In the second case define X q j X ^ 5 . . . as follows:
if n 0 < V 1 + I
■
28
r 2
X1
.2
.
= x I^v 1- W 2+2
'
. 2
+ x I^n3
if
if n, < V1 + Vn + 2
X 12 s O
x k 2 = x k ! v k+l +
rtf nk g yk + 1
••• + x k ! n t
if n. < v v + I
X lc2 ^ o
Let N be the set of integers r such that X r ^ 0.
not empty.
rt Vg "*i ^
N o w a 5 6 r < p,
r = l,2,...,k.
Note N is
It follows that
on the uni o n of the closed shells
X r2
r- 2
~r
R,
r e N ,
0,
r/ N
the continuous function ^(o)
R a positive constant,
attains a m i n i m u m value
p (R)
where
p(R) g p
One is now faced w i t h the p r o b l e m of showing that there
—
exists some finite R 5 such that w h e n X r
2
> R for any r,
r = 0 ,1 ,2 ,...,k, and for any a rbitrary set of join points
<51 3<52 5 ' ’ *
be shown,
is also true that y(a>) g p"(R).
then the lower b o u n d of ^(w)
If this can
for all co is the same
— 2
as the lower bo u n d w h e n w is restricted b y X r S Rj
r = 0 , 1 , 2 , ,k.
Let the n o n - e l iminated X r j coefficients
be b roken into two types.
Those coefficients w h i c h are
associated w i t h po lynomials evaluated at only one po i n t shall
29
be called type I coefficients.
points are equal.)
(This happens w h e n two join
Those coefficients w h i c h are associated
with polynomials evaluated on a non-degenerate interval shall
be called type II coefficients,
At the j oin points, the general spline f u n c t i o n fits
the function f exactly w h e n e v e r the system of equations
is satisfied.
In this system of e q u a t i o n s 5 each
ficient, w h i c h has not b e e n eliminated,
equation wit h finite coefficients.
are arbitrary but f i x e d . )
finite solution.
j
IjJ
(?)
coef-
appears i n a linear
(Note that
‘
Such an e q u ation always has a
Thus there exists a positive constant
such that the value of (f (x) - sk (x)) is zero at each join
point x - a r J r = 1 ,2 ,...,k, and
X j,
= Rj ,
r = 0 ,1 ,2 ,. ..,k
In fact here Rj c a n be taken to be zero.
of type I only influence
As the coefficients
( f (x) - Sk (X)) at a j o i n point,
it
follows that nothing is to be gained b y havi n g any type I
coefficients satisfy
^r
for any r,
> Rj
Consequently if there are no coefficients of
type II, then there must exist an u>* on the closed domain
described b y X r2 g Rj, r = 0 ,l,...,k, a < 6 r„j S 6 r ^ 6r+1 €
r = 1 ,2 ,...,k, such that ^( cd*) = p ,
30
Next assume there is at least one coefficient of type II.
Let
'‘ ‘ -f6K be an a rbitrary set of fixed join points,
and, let ¥(x) be the function obtained f rom sk (x) b y setting
ail non-eliminated
coefficients equal to zero.
a continuous f u n ction on [ a , p ].
It has b e e n p r o v e d that
I If (x) - S^(X) I I is a continuous f u n c t i o n of tu.
follows that I Is(x) - sk (x)||
s(x) is
Thus it
:
On the closed shells
T- 2
x r - I,
r e N
O
it
OJ
r / N
the continuous function ||s(x)
value c .
On any closed interval
Cd r
> 6 r+ i
3 w h i c h has an
,associated non-eliminated X v, ^ coefficient of type II, the
z JJ
2
independence of the functions I, x, x ,...
x e m [5
X r >ar+J
S(X)
- 6k<*)|
implies that
= T r>
0
Thus
I I eT(x ) ■- sk (x)| I g CT g a r > o,
'r e N
The homogeneity in the X r ^j 1s of the expression, ("s(x) - sk (x))
implies that for any vector to w i t h fixed 6
1 I S-(X)
- sjx)||
> CTr \jYr ^
, '
‘ •j>6 k >
r e N
Thus when
> R r = (p + I + I I f(x) - s(x) | I )/CTr ,
for any r e N, it follows that:
31
V W
= ||f(x) - sk (x)||
= I|f(x) - s(x)+s(x)-sk (x)|I
> I|7 (x) - Sk ( X ) I I - I l f(x) - S(X)I I
g a r [(p-HLH-',| | . f ( x ) ~ s ( x ) | I )/.orr ] -, | | f(x)i-"8(x)('(
= p + I
Hence the lower bound of ^(co) j for all m with fixed
<5l,<52, ♦,. j<5k is the same as the. lower bound when a), is-re-'.',
stricted' by
= Hjj
s
r ~ Ojlj.a.jk
where
•
d
— mstk ■ r>
kII " r € N
It will now be established that R j j is a continuous f u n ction
of the join points <5j-xSg* ’ ’ * 3<5k*
^
has a lready b e e n e s t a b ­
lished that f(ai) = ||f - sk || is a continuous f u n c t i o n of
the join points.
This implies for any general spline funct i o n
sk , that ||sk || is a continuous function of the join points.
Let sr (x) be defined by:
|"s(x)
: r W
- 8k(x),
x.e
[dr .dr+i3
,
X ^
[6 r ,6 r+ 1 ]
=
(
o
^
It is easily shown that sr (x) is a general spline function.
Consequently ||®r (x )|! is a continuous f u n c t i o n of the join
p o i n t s ,1 -Now
I l l5r M l l
= x em[ 6 r , 6 r + 1 ] l s ( x )
Thus or is a continuous f u n c t i o n of «5
" ak ( x ) l =
‘ • >6 ^*
ar
32
F r o m this it follows that R
is a continuous f u n c t i o n of
d l >°2>*''>6 k. and consequently
is also.
The j oin points
satisfy the relation;
«*. S 6 ^ § P
=
On this closed subspace the continuous funct i o n
a maximum v a l u e .
Call this value R,
the lower bo u n d of
attains
It n o w follows that
for all co e E is the same as the
lower bound w h e n <jd e E is restricted by
r — O ^l^ot.^k
This completes the proof of the existence of a spline
function of b est approximation i n the sense of the Tchebycheff
‘ ‘ • 5V k ’
no r m for the p e r m u t a t i o n
finite number of permutations of
all possible permutations,
There are only a
*•*
•Thus out of
there mus t exist at least one
w h i c h makes the n orm a minimum.
Theorem 3,
Let f be a continuous real v a lued f u n c t i o n on the n o n ­
degenerate interval
[a,f? ] t
Let
and no^ n i^ • * • »n k
be finite sets of non-negative i n t e g e r s .wit h
n^ §
Let v q>v 2 » * * • »v k
^
(i,^ , r — 0 ,1 ,.. ., k
an a r bitrary p e r m u t a t i o n of Ii1 iM-2 * • * *
33
Let S = S( v 1 ,v 2 5 « « • jiVk ) be the class of all general spline
functions which,
(a) have j o i n points
trarily selected fro m the interval
= #2 -
that
••• =
arbi­
[a, p ] and labeled such
(^) have derivatives up through
order v^ , v 2 ,...,v^ at the respective join points O ^ j G 2 , . ..,6 %,
and (c) are of degree less than or equal to n 0 on [0 ,0 2 1^ ^o
n r on [Sr Jdr f l ]* r = Ifl2 A •••flk-1 and to n k on [dk ,P].
Then
among all functions in S there is at least one f u n c t i o n sk
such that I If - sk || is.a minimum.
Furthermore,
among all
possible permutations of P 1 5I-lP 5 * * ' there exists at least
one p e r m u t a t i o n wh i c h makes this Tchebycheff n o r m a minimum.
The proof is similar to the proof of the o r e m 2.
5.
Characterization of Best Spline A p p r o x imations
If the join points are not fixed, the bes t fitting
general spline function m a y not be unique.
consider the f u n ction f(x)
F o r example
defined by
f(x)
X <
- -g
| s
XS
I
77 < X
where
r
^ l x - [x]|
- ^
w h e n [x] is even
g(x)
l^\ [x+ 1 ] ~ x| - ^ w h e n [x] is odd
34
and
h(x) = x 2 ~
Here
[x] XB the greatest i nteger function.
The graph of this
function is g i v e n in figure' 2 .
If one wants to fit f (x) on the interval
general spline function w h i c h agrees w i t h f(x)
[-4,4] using a
at one joi n
p o i n t <$ and is of degree 2 on [-4, 5 ] and also on [6,4],
then
a best fit is g i v e n by
“4 < X < 6
" - Tf) a
S1 (X)
(x2
6 - 'X £ '4
%r) a
with
6 = ± I
F o r each of these two values qf 5 , the m a x i m u m error is
I
It will now be shown that this fit cannot be improved.
On the interval [-4,-1],
V(f(x) +
F r o m lemma 3,
on [-4,-1].
(X2 - | ) ) = 4
-(x 2 - %p) is a best fitting quadratic of f (x)
S imilarly (x
of f (x) on [1,4].
- ^)
is a best fitting q uadratic
Furthermore,
I
x e j> 4 ,-i]
+ (x2 •
“ ?)!
I
x e [1 ,4 ]
" (x2 "" &)l
-
-Nh
35
Figure 2.
Illustration of a non-unique solution
36
This implies that for any join point 6 e [-4,4],
||f(x)
- S 1 (X)II
= x
I f (x ) " S 1 (X)I
5 ^
Thus there are at least two optimum joi n -points, and the
best general spline approximation is not u n i q u e .
Neverthe­
less, it is still true that once g is determined,
le m m a 3
characterizes the best approximation on each of the su b i n ­
tervals,
6.
C omputational Procedure
When computing a best approximation on an interval,
it
is often desirable to replace that interval b y a finite set
of points and to seek an approx i m a t i o n w h i c h is optimum on
that set.
Because of the continuity of the f u n ction being
approximated, it seems reasonable to expect that if this
finite set of points leaves no wide gaps, t hen an a p p r o x i m a ­
tion obtained i n this w a y w i l l be acceptable.
The process
of replacing the c ontinuum b y a discrete set is called
discretization.
It is shown in [4] that w h e n the a p p r o x i m a ­
tion family satisfies the Haa r condition, the n the a p p r o x ­
imation obtained by discretization does indeed a p p roach the
bes t approximation as the discrete set ’’fills up" the i n t e r ­
val, i.e.
as the length of each subinterval of the p a r t i t i o n
approaches zero.
2 I
The family of functions l,x,x ,x ,...
satisfies this H a a r condition.
Consequently, best general
spline function approximations can be obtained approx i m a t e l y
37
using discretization w h e never the join points are known.
Furthermore#
the fact that j jf (x) - Slc(X) j | is a continuous
function of the join points insures that discr e t i z a t i o n can
be used to find a near optimum solution even w h e n the join
points are arbitrary.
The number of possible choices for the join points b e ­
comes extremely large as the discrete set "fills up" the
interval in such a way that no large gaps are left.
For this
reason an impro v e d method for obtaining a near optimum set
of join points wo u l d be v e r y desirable,
W h e n computing g e n ­
eral spline f u n ction approximations# it is helpful to notice
that sometimes the norm is an increasing f u n ction of the
lengths of the associated intervals.
this is not always the case.
Unfortunately, however,
For example if the f u n c t i o n
b e i n g approximated is a general spline function,
then the
n o r m may decrease as the l e ngth of a subinterval is increased.
7»
Examples
It is obvious from the definition of a general spline
function that a general spline function a p p r o x i m a t i o n w i t h
no imposed b o u n d a r y conditions is at least as g ood as a
polynomial approximation if all of the polyno m i a l s u sed are
of the same degree.
The following examples show that even
for the "smooth" function ex , x e [0 ,1 ], the m a x i m u m error
of the best fitting quadratic is about six times as large
38
as the max i m u m error for the best f itting general spline
function composed of polynomials of the same degree and
having one join point 5 -
.53»
(See Table I.)
Admittedly,
it is true that a digital computer must test to determine
whether x is larger or smaller than the join point ,-in order
to properly evaluate the general spline function, b u t this
is a small price to pay for an answer w i t h an error bound
I
wh i c h is £ as large as that of the single quadratic.
Fur­
thermore,
the second degree general spline function w h i c h is
forced to fit ex and its first derivative at x =
.53 has an
error bound w h i c h is less than half as large as the unre?stricted single quadratic po l y n o m i a l approximation.
The o s cillation numbers associated w i t h the examples in
Table I indicate that the approximations obtained are n e a r l y
optimum for the given j oin points.
However,
the only join
point which is near l y optimum is the j o i n p o i n t <5 =
Figure 3 shows the graphs of three error curves.
.53.
The graph
labeled II shows a good fit of both ex and its derivative
for x near .53.
This of course is expected in that the
spline function associated w ith this error curve was made
to agree exactly with b o t h ex and its derivative at the
point
x = .53.
Table I.
Description of the
general spline
function s (x)
General Spline Function Approximations of eX on [0,1]
Join
P o i n t (s)
5
M a x imum error in
absolute value
b y interval
Oscillation
n u m b e r (s)
b y interval
Coefficients of the
gen e r a l spline function
^iO
I.
One
quadratic.
II.
Two quadratios with
^il
none
.0089
4
1.008616,
.5
.0031
.0045
2
2
1.002900, 0.934583, 0.714117
1.065232, 0.685171, 0.963529
.52
.0035
.0040
2
2
1.003400, 0.928001, 0.724999
1.071351, 0.666653, 0.976295
.53
.0037
.0038
2
2
1.003612, 0.924829, 0.730256
1.074616, 0.656889, 0.983029
.55
.0041
.0034
2
2
1.004021, 0.918690, 0.740564
1.081293, 0.637689, 0 . 996010
.55
.00145
.00145
3
1.001225, 0.960166, 0.673333
1.120575, 0.523166, 1.073333 .
0.855103, 0.845964
s (5) = e^ and
s (d) = e 5 .
tt
!T
It
III.
Two quadratios with s(x)
contin u o u s .
IV.
Three quadratios with
s (.3) = e"^ and
s(.7) = e * 7 .
.3,.7
.0003
.0009
.0004
3
3
2
3
.
1.000185, 0.989571, 0.587142
1.026275, 0.829751, 0.829999
1.187701, 0.363142, 1.167142
40
OlO T
007
-
009 -
- I . 008616- 0 .855103x -0.845964 x , 0 < x <
- I .003612- 0 .9 2 4 8 2 9 x - 0 .730256x 2 , 0 < x <
- 1 .0 74616-0.6 5 6 8 8 9 x - 0 . 9 8 3 0 2 9 x 2 ,.5 3 i x <
- I .001225- 0 .9 6 0 l 6 6 x - 0 . 6 7 3 3 3 3 x 2 , 0 < x <
Figure 3.
E r r o r curves
41
Literature Cited.
1.
A h l b e r g 3 J. H .3 E. N. N i l s o n and J , L. Walsh.
(I967 ).
The theory of splines and their a p p l i c a t i o n s 3 Academic
Pressy New York.and L o n d o n ,
2,
B i r k h o f f 3 G . „ and C. De Boor.
(1964).
Error bounds for
spline interpolation. Journal or Mathematics and Mechanics 1
1 3 3 '827-835.
3.
B l u m 3 E. K . 3 and P. C. Curtis.
(1961 ).
Asymptotic
behavior of the best polynomial a p p r o x i m a t i o n . A s s o c i a ­
tion for Computing M a c h i n e r y Journal B 3 645-647.
4,
C hene y 3 E. W.
(1966 ).
Introduction to A p p r o x i m a t i o n
T h e o r y , M c G r a w - H i l l 3 New York.'
3
,
C hene y 3 E. W., and A. A. Goldstein.
(19.
6 5 ) • T c hebycheff
approximation and related extremal problems 3 Journal of
Mathematics and Mechanics 1 4 3 87 - 98 «
6 ., Clen s h a w 3 C. W.
(1964).
A co m p a r i s o n of "b e s t " p o l y ­
nomial approximations w i t h truncated Chebyshev series
e x p a n s i o n s 3 Society for Industrial and A p p l i e d M a t h e ­
matics Journal Series B Numerical Analysis I 3 26-37•
7.
C urti s 3 P. C.
(1962 ).
Convergence of approximating
p o l y n o m i a l s , A m e rican M a t h e matical So c i e t y Proceedings
" 1 3 3 305- 387 .
8.
de la Vallee P o u s s i n 3 C. J.
(1911).
Sur la m 6thode de
I 'approximation m i n i m u m , Societe Scientifique de
Bruxelles, A n n a l e s 3 seconde partie, Memoires 3 5 ^ 1-16.
9.
L a w s o n 3 C. L.
(1963 ).
S egmented Rational M l n m a x A p p r o x ­
i m a t i o n , Characteristic Properties and Computational M e t h o d s , Jet Propulsion L a b o r a t o r y 3 P a s a d e n a 3 California,
Report 32-579.
10..
Nitschey J. C. C.
(1962 ).
Uber die Abha n g i g k e i t der
Tschebyscheffschen A p p r o x i m l e r e n d e n einer d i f f e r e n z i e r baren F u n c t i o n vom I n t ervalI 3 Numerische M a t h e m a t i k 4,
262-2767
“
11,
-
Schoenberg, I. J * (1968 ).
On the A h l b e r g - N i l s o n E x t e n sion of Spline I n t e r p o l a t i o n : The g-Spllnes and their
optimal p r o p e r t i e s , Journal of Mat h e m a t i c a l Analy s i s and
Applications 21, Number I 3 207-231.
,
42
12i
Tc h e b y c h e f f , P. L,
(1859)«
Sur Ies questions de m i n i m a
qui se ra t t a c h e n t ,a la r e p r e s entation approximative des
f o n c t l o n s « Oeuvres™!, 2 7 3 ”3 7 8 -
13*
Todd# J.
(editor).
(1962 ).
S u r v e y of Mumeridal
A n a l y s i s , McGraw-Hill, New York.
-
MONTANA STATE UNIVERSITY LIBRARIES
^>3*78
* " 11
C o V - A