NUMERICAL ANALYSIS AND SCIENTIFIC COMPUTING FOR PDEs AND THEIR CHALLENGING APPLICATIONS
advertisement

NUMERICAL ANALYSIS AND SCIENTIFIC COMPUTING FOR PDEs
AND THEIR CHALLENGING APPLICATIONS
J. Haataja, R. Stenberg, J. Periaux, P. Raback and P. Neittaanmaki (Eds.)
c CIMNE, Barcelona, Spain 2007
ROTATIONAL SYMMETRY, LOW DISSIPATION AND USE
OF EIGEN DIRECTIONS IN WEIGHTED LSKUM
S M Deshpande∗
Anil N, Arora K, K S Malagi
Engineering Mechanics Unit
Jawaharlal Nehru Centre
for Advanced Scientific Research
Bangalore - 560064, India
Email: smd@jncasr.ac.in
Web page: http://www.jncasr.ac.in/emu/smd/
Department of Aerospace Engineering
Indian Institute of Science
Bangalore - 560012
India
Abstract. The KFVS (Kinetic Flux Vector Splitting) and LSKUM (Least Squares
Kinetic Upwind Method) since their inception have long gone into applications in
various laboratories of India. This work presents the recent advancements made in
KFVS and LSKUM. The theoretical basis of KFVS has been further established
by casting it in the fibre bundle frame work. This explains why KFVS works so
well. The violation of rotational invariance by LSKUM, like many other multidimensional solvers, has been addressed by developing KUMARI (Kinetic Upwind
Method Avec Rotational Invariance). The dissipation inherent in the first order
KFVS is reduced by developing modified KFVS (mKFVS). It gives a control on the
dissipation present in the scheme. The robustness is an extremely important aspect
in flow problems for complex geometries. The weighted LSKUM precisely enhances
the robustness of LSKUM by reducing the multidimensional least squares formulae
for spatial derivatives to 1D formulae by appropriate choice of weights.
Key words: KFVS, LSKUM, mKFVS, wLSKUM, KUMARI, fibre bundles
1
INTRODUCTION
1
2
The KFVS and LSKUM have long ago gone into applications in various laboratories of India. Problems involving flow past various bodies of practical interest
3
have been successfully computed . Continuing the research work to improve these
numerical schemes, we have given here a brief account of recent advances made.
In this work the theoretical basis of KFVS, the property of rotational invariance,
low dissipation and robustness have been addressed. The theoretical basis of KFVS
has been furthered by casting it in the frame work of fibre bundles. This explains
why KFVS works so well and poses some interesting questions. As with many other
multidimensional upwind solvers, the LSKUM violates rotational invariance though
1
Numerical Analysis and Scientific Computing for PDEs
4
the effect is seen much less in case of LSKUM compared to others . In multidimensional case the standard LSKUM uses dimension by dimension splitting which
5
results in symmetry breaking and consequently rotational invariance is lost . We
have developed a rotationally invariant kinetic upwind gridfree method called KUMARI (Kinetic Upwind Method Avec Rotational invariance) to address the above
mentioned issue using the connection between directional derivative, divergence and
Fourier series. The first order KFVS is found to be dissipative. Though the higher
order KFVS has overcome this problem, we have developed a modified KFVS (mKFVS) which achieves higher accuracy though being strictly first order accurate. The
mKFVS allows the control of dissipation and gives nearly second order accurate
results. The robustness is a very important aspect when one deals with flow computations past bodies of practical interest. The LSKUM which is robust, as suggested
by our experience over a decade, has been made even more robust by developing
weighted LSKUM (wLSKUM). The weighted LSKUM chooses the weights in the
least squares evaluation derivatives in such a way that the multidimensional least
squares formulae are reduced to 1D formulae. This reduces the problem of bad con3
nectivity caused code divergence . First we start with a very brief introduction to
kinetic schemes and LSKUM.
2
Basic Idea of kinetic schemes
1
Kinetic schemes are based on the well known fact from the kinetic theory of gases
that the suitable moments of Boltzmann equation lead to Euler or Navier Stokes
equations depending upon whether the molecular velocity distribution function is
a Maxwellian or Chapman-Enskog distribution. When the molecular velocity distribution function f is a Maxwellian distribution F the 1D Boltzmann equation is
given by
∂f
∂f
+v
= 0, f = F
(1)
∂t
∂x
where v is the molecular velocity. The Maxwellian distribution F is given by,
ρ
F =
I0
Df
I
β 2
2
exp −β(v − u) −
π
I0
(2)
where the notations have standard meaning. The molecular velocity v, can be split
into positive and negative parts using CIR splitting as,
v=
v + |v| v − |v|
+
= v+ + v−
2
2
(3)
The 1D Boltzmann equation given by Eq.(1) can then be written in CIR split form
as,
∂f
∂f
∂f
+ v+
+ v−
= 0, f = F
(4)
∂t
∂x
∂x
Now taking Ψ moments, we obtain the standard KFVS Euler equations,
∂GX + ∂GX −
∂U
+
+
=0
∂t
∂x
∂x
(5)
S M Deshpande et al./ Rotational symmetry, low dissipation and weighted LSKUM
where GX ± are split fluxes given by,
±
GX = Ψ, v ± F =
Z
R+
Z
ΨvF dvdI
R±
T
v2
where, Ψ = 1, v, I +
2
(6)
By upwind differencing the spatial derivatives in Eq.(4) using finite differences, we
obtain the semi discrete Boltzmann equation as,
+
∂f
(v f )i − (v + f )i−1 (v − f )i+1 − (v − f )i
+
=0
(7)
+
∂t
∆xi,i−1
∆xi+1,i
Now using a forward time stepping and then taking the Ψ moments, we obtain a
numerical scheme for Euler equations based on KFVS,
+
−
GXi+ − GXi−1
GXi+1
− GXi−
n+1
n
Ui
= Ui − ∆t
(8)
+
∆x
∆x
The KFVS method thus involves development at two levels - Boltzmann level and
Euler level, which are connected by moment relations.
2.1
Least squares Meshless Methods
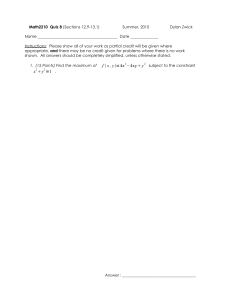
In the least squares based meshless methods the discrete approximation to derivative is obtained by using the least squares principle. Consider the 1D distribution
of points as shown in the Fig.1. We want to evaluate Fx at P0 given Fi at each
of the nodes in the connectivity set C(P0 ), which is defined as C(P0 ) = {Pi , ∀i ∈
(1, ..n) / d(Pi, P0 ) < h}, where d(Pi, P0 ) is the Euclidean distance between Pi and P0
and h is a characteristic length to be chosen by the user. Expanding the function F
in Taylor series around P0 we have
∆x2i
Fxx0 + O(∆x3i )
2
where, ∆Fi = Fi − F0 , ∆xi = xi − x0
(9)
Define error, E = Σ(∆Fi − Fx0 ∆xi )2
(10)
∆Fi = Fx0 ∆xi +
and minimising E we get,
(1)
Fx0 = LS
where, LS
h
∂()
∂()
i
C
"
∂F
∂x
C(P0 )
#
=
Σ∆Fi ∆xi
Σ∆x2i
(11)
is the notation for least squares evaluation of derivative over
the connectivity C. The Fx given by Eq.(11) is first order accurate and can be easily
5
made second order accurate by defect correction technique .
2.2
Least Squares Kinetic Upwind Method (LSKUM)
Least Squares Kinetic Upwind Method (LSKUM) is a gridfree kinetic upwind
2
method developed by Ghosh and Deshpande . The method uses the KFVS Euler
equations and least squares evaluation of derivatives. The flux derivatives in KFVS
Numerical Analysis and Scientific Computing for PDEs
Figure 1: Point distribution and stencil splitting in case of 1D
Euler equations are evaluated using least squares approximation which requires only
a cloud of points and hence the method is gridfree. Consider the CIR split 1D
Boltzmann equation given by Eq.(4). The spatial derivatives in this equation are
discretised using least squares approximation and then the moments are taken to
arrive at LSKUM state update formula. The Euler equations being hyperbolic, we
have to evaluate the derivatives in an upwind way and accordingly split stencils are
used, and these are defined by,
C1+ = {Pi ∈ C(P0 )/∆xi < 0} and C1− = {Pi ∈ C(P0 )/∆xi > 0}
(12)
These are shown in Fig.1. Now CIR split Boltzmann equation can be upwind discretised using least squares method along with stencil splitting,
"
#
"
#
∂f
∂ +
∂ −
+ LS
(v f )
+ LS
(v f )
=0
(13)
∂t
∂x
∂x
C + (P0 )
C − (P0 )
1
1
Taking the Ψ moments and using forward time stepping for the time derivative in
the above equation, we obtain the LSKUM state update for 1D Euler equations as,
(
U0n+1 = U0n − ∆t LS
3
"
∂
(GX + )
∂x
C1+ (P0 )
#
+ LS
"
∂
(GX − )
∂x
C1− (P0 )
#)
(14)
Fibre Bundles
It is very interesting to observe that KFVS can be interpreted according to the
theory of fibre bundles. We have used the concepts, terminology and notation
6
of Isham . First let us introduce various spaces. Let E be space of all velocity
distribution functions f (t, x1 , v1 , I) in case of 1D and f (t, x1 , x2 , v1 , v2 , I) in case of
2D. We will deal with 2D hereafter. Obviously we need to impose the constraints
that every f ∈ E should have finite ψ-moments (Eq.(6)). We may further demand
that f ≥ 0 (strong positivity condition) or ρ, p ≥ 0 (weak positivity condition).
Note that ρ, p are unique functions of U =< ψ, f >. In the terminology of fibre
bundles, E is a total space. Now introduce M =base space and the map
π : E→M
(15)
M is the space of U =< ψ, f >. We thus have 3-tuple (E, π, M). The inverse image
π −1 (U) of projection map π is the fibre over U ∈ M. Thus we have,
E, π, M, ṽ = π −1 (U), B
(16)
S M Deshpande et al./ Rotational symmetry, low dissipation and weighted LSKUM
Where E= total space, π= map, M = base space, ṽ= fibre and B= bundle. We
will not worry right now in what exact sense E and M are topological spaces. For
each U ∈ M, the fibre π −1 (U) is a conservative fibre in the sense that; ∀f ∈ π −1 (U)
the mass, the momentum, and energy densities are the same. There is a well known
7
result that among all f ∈ π −1 (U) the Maxwellian F ∈ π −1 (U) has maximum
entropy measure or equivalently minimum H, i.e.,
H(F ) ≤ H(f ), f ∈ π −1 (U)
(17)
Here H(f ) is the Boltzmann H-function which is a measure of information. Hence
all the Maxwellians F ∈ E constitute a cross-section of bundle B and KFVS method
for Euler equations operates in this Maxwellian cross-section of bundle B. Let us
denote this cross-section by ṽ(f ), then for 2D we have the result
ρβ
I
2
2
F =
(18)
exp −β(v1 − u1 ) − β(v2 − u2 ) −
I0 π
I0
which gives G =< vψ, F > ∀F ∈ v(F )
(19)
Hence under the map
F →U
(20)
π :
vF → G
and therefore 2D Boltzmann equation maps to 2D Euler equations of gas dynamics.
It is important to emphasize that for all f ∈ E but f 6= F the Euler equations
are not moments of Boltzmann equation. Only for a distribution function in the
Maxwellian cross-section of bundle, the Boltzmann equation maps to Euler equa1
tions. KFVS precisely uses this mapping (called moment method strategy ). There
are many interesting questions about the fibre interpretation of KFVS method. Is it
a principal fibre bundle, can we generate a fibre π −1 (U) using orbit of some group G?
The collision dynamics occurring in Boltzmann equation gives us natural group for
transforming precollision velocities vi , wi to post collision velocities vi′ , wi′ involving
two parameters, b(impact parameter) and angle ǫ which plane of motion makes with
some reference plane. Also there is concept of inverse collision which has as precollision velocities vi′ , wi′ and gives as post collision velocities vi , wi . In the present
context, we consider these as transformations (and not collisions), i.e., vi′ , wi′ are
transformed velocities and hence
vi′ = vi′ (vi , wi , b, ǫ),
wi′ = wi′ (vi , wi , b, ǫ)
(21)
Thus any two particle distribution functions of the type f (vi )f (wi ) can be transformed to f (vi′ ), f (wi′ ) and we can obtain one-particle velocity distribution function
from the product f (vi′ )f (wi′ ) by integrating over wi. Because of summational invariants the resultant one-particle velocity distribution function will also belong to
π −1 (U) but will have reduced value value of H−function or equivalently increased
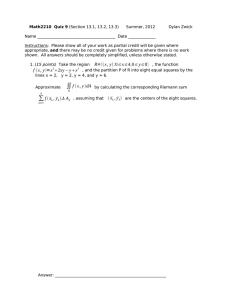
entropy. Thus it is possible to subject f (v) ∈ π −1 (U) to several collisional transformations and take it to Maxwellian F (v) ∈ π −1 (U) which has maximum entropy. This
is pictorially shown in Fig.2. We end this discussion with KFVS update regarded
as a fibre connection which involves movement across fibre. In KFVS update, we
start with U n and get U n+1 , thus the update causes movement from fibre π −1 (U n ) to
fibre π −1 (U n+1 ). We thus move from one Maxwellian to another in the Maxwellian
cross-section of the bundle.
Numerical Analysis and Scientific Computing for PDEs
Maxwellian cross−section
F
f’’
Towards
decreasing
H
Fibre
−1
π (U)
looping is due to
entropy preserving transformation
f’
M
U
H(F) < H(f’’) < H(f’)
Figure 2: Sketch of fibres and cross section
4
Rotational invariance
5
Deshpande has studied the question of symmetry of differential operators and
1
their discrete approximations. In kinetic schemes one often deals with differential
operator
∂f
∂f
D (f ) = v1
+ v2
(22)
∂x
∂y
which arises in Boltzmann equation. In terms of the concepts of differential geometry,
∂
∂
D = v1
+ v2
(23)
∂x
∂y
is a vector field and D(f ) represents rate of change of f in the direction of the field.
Alternatively, we can consider 1-form
df =
∂f
∂f
dx +
dy
∂x
∂y
(24)
and the vector (v1 , v2 ), and then regard D(f ) as an inner product between (v1 , v2 )
and 1-form df . The differential operator D (f ) being a scalar product is invariant
under 2D rotation group O (2). Let us now consider least squares approximations
2
(1)
(1)
fx0 and fy0 to fx0 and fy0 respectively at some point P0 . Then the discrete differential operator is
(1)
(1)
DD (f ) = v1 fx0 + v2 fy0
(25)
5
which as Deshpande has shown is invariant under O (2). Here, O (2) is a symmetry
group of D (f ). However, when we use standard finite difference scheme to discretise
fx0 and fy0 , then the resultant approximation on a 2D regular mesh is not invariant
under O (2). It is however invariant under a subgroup of O (2) and this property
5
is called symmetry breaking by Deshpande , who has also shown that upwinding
2
generally breaks symmetry! For example, upwinding is enforced in LSKUM by
stencil division. The upwind approximation to D (f ) used in standard LSKUM is
not invariant under O(2). However it invariant under subgroup E ∈ O (2) consisting
of
E = {R(0), R(π/2), R(π), R(3π/2)}
(26)
Thus upwinding along coordinate directions based on stencil division is symmetry
breaking. A question therefore arises; Can we construct an upwind approximation
to D(f ) defined by Eq.(22) which is also rotationally invariant i.e., no symmetry
S M Deshpande et al./ Rotational symmetry, low dissipation and weighted LSKUM
breaking is allowed? In the present work we have addressed this question and have
developed a rotationally invariant kinetic upwind gridfree method. The study of directional derivative reveals an interesting connection between directional derivative,
divergence and Fourier series. Using this connection effectively we have developed
a rotationally invariant kinetic upwind gridfree method called KUMARI.
4.1
Relation between directional derivative and Fourier series
8
It can be easily shown . that the expression for directional derivative is in fact a
Fourier series with only three terms given by
∂ ~
(Q ℓ̂) = A0 + A1 cos θ + B1 sin θ + A2 cos 2θ + B2 sin 2θ
(27)
∂s
∂
1 ∂
∂
1 ∂
(GX) +
(GY ) , A2 =
(GX) −
(GY ) ,
A0 =
2 ∂x
∂y
2 ∂x
∂y
1 ∂
∂
B2 =
(GX) +
(GY ) and A1 = B1 = 0
2 ∂y
∂x
~ is the flux vector in 2D and ℓ̂ is a unit vector making an angle θ with
where Q
x−axis and s is the distance along ℓ̂,
~ = GX î + GY ĵ, ℓ̂ = cos θî + sin θĵ
Q
(28)
One important observation regarding the first term of the Fourier series is in order.
1 ∂
∂
1
~
∇Q
(29)
A0 =
(GX) +
(GY ) =
2 ∂x
∂y
2
From the above equation it is clear that the term A0 contains the divergence of
~ Thus the Fourier expansion of directional derivative contains the
flux vector Q.
~
information of divergence of flux vector Q.
4.2
Basic theory of KUMARI
The Euler equations given by,
∂
∂
∂U
+
(GX) +
(GY ) = 0
∂t
∂x
∂y
(30)
can now be re-written using Eq.(29) as,
∂U
+ 2A0 = 0
∂t
If we have an approximation for A0 then Eq.(31) becomes an ODE,
(31)
dU
+ 2(discretised A0 ) = 0
(32)
dt
The above system of equations can be solved by any of the standard methods available to solve ODEs. Hence if we can find a consistent and rotationally invariant
approximation to A0 , then we can devise a rotationally invariant scheme for Euler
equations. For simplicity of explanation let us introduce the following notations,
~ ℓ̂ = special flux , ζ(θ) = ∂ (E) = directional derivative
E=Q
∂s
(33)
Numerical Analysis and Scientific Computing for PDEs
4.3
Least squares Fourier fit
Following the earlier discussion showing the relation between Fourier series and
directional derivative, it is clear that we can represent directional derivative by
Fourier series. Let us approximate ζ(θ) by Fourier series (say of three terms),
ζ(θ) = A0 + A1 cos θ + B1 sin θ
(34)
We can approximate the above Fourier co-efficients using the well known idea of least
squares fitting of functions. Suppose we have m values of ζ(θj ) for (j = 1, ..., m),
where m is the number of directions which can be arbitrary. Obviously if m > 3,
the above system of equations becomes overdetermined. We can then easily find
A0 using the least squares principle. Further using the simple Euler time stepping
yields the update formula,
U0n+1 = U0n − 2∆tA0
(35)
It is also possible to evaluate the Fourier co-efficients using the standard integral
8
formulae to find the co-efficients of Fourier series and numerical quadrature .
4.4
Least squares evaluation of directional derivative
This section explains how to compute ζ(θ). Note that ζ(θ) is a derivative along
~ along ℓ̂. Since the Euler equations are
any direction ℓ̂, of component of flux vector Q
hyperbolic in nature we need to evaluate ζ(θ) in an upwind way along any direction
θ. For this we need to split the special flux E into split fluxes E + and E − . The
splitting is done along s. This has been achieved by developing special flux vector
8
splitting(SFVS) . Using SFVS the directional derivative becomes,
ζ(θ) =
∂ ~ ∂E
∂E + ∂E −
Q ℓ̂ =
=
+
∂s
∂s
∂s
∂s
(36)
To compute the derivatives of special split fluxes in the above equation we can
again use the least squares approximation of derivatives, as in standard LSKUM,
along with special split fluxes. The upwinding is achieved by stencil division, as
in LSKUM, along each direction. The least squares formulae employed to evaluate
spatial derivatives in Eq.(36) are given in [8]. It is thus clear that the split derivatives
in the expression for the directional derivative, ζ(θj ) can be determined in an upwind
way by using the least squares formula along each direction θj , for j = 1, . . . . . . , m,
m being number of directions which can be arbitrary.
4.5
Results
We have successfully solved the standard 2D shock reflection problem involving
supersonic flow using KUMARI. The Fig.3(Left) shows the plot of variation of pressure along x-axis at y = 0.35 using standard LSKUM, KUMARI and exact solution.
We can easily see that the KUMARI captures the shock accurately. The convergence characteristics Fig.3(centre) of KUMARI are as well better when compared
to standard LSKUM. The Fig.3(right) shows the plot of pressure contours for 2D
Riemann problem of 3rd standard test case of Peter Lax. We can see that slip lines,
Kelvin-Helmholtz instability and other features have been captured well.
S M Deshpande et al./ Rotational symmetry, low dissipation and weighted LSKUM
0
4
1
KUMARI
3.5
KUMARI
LSKUM
LSKUM
-5
0.8
RESIDUE
pressure
3
EXACT SOLUTION
2.5
0.6
-10
0.4
2
0.2
1.5
-15
1
0
1
2
3
X
0
5000
10000
N
15000
0
0
0.2
0.4
0.6
0.8
1
Figure 3: (Left)Pressure at y=0.35 (centre)residue comparison (right)Pressure contours for 2D
Riemann problem
5
mKFVS
The usual first order kinetic scheme is found to be more dissipative. However,
3
higher order accurate schemes have been constructed for better accuracy and for
considerably reducing numerical dissipation. To control the dissipation in the first
9
order KFVS scheme, Deshpande has defined a modified way of CIR splitting,
namely MCIR splitting of the molecular velocity by introducing a dissipation control
function.
5.1
MCIR splitting
Using Taylor series, the semi-discrete upwind scheme for the 1D Boltzmann equation, Eq.(7) gives the modified partial differential equation (mpde),
∂F
∆x
∂F
+v
=
|v|Fxx + O ∆x2
(37)
∂t
∂x
2
In the above equation the leading term in the truncation error shows that it is first
order accurate and is dissipative. The mpde Eq.(37) shows that |v| contributes to
9
the numerical dissipation. To reduce the numerical dissipation, Deshpande has
introduced a dissipation control function φ as a multiplying factor for |v|. The
modified way of CIR splitting of the molecular velocity, called MCIR splitting is
given by
v + |v|φ v − |v|φ
+
(38)
v = v+ + v− =
2
2
Using the above defined MCIR splitting the semidiscrete upwind scheme for 1D
Boltzmann equation is given by
v + |v|φ Fj − Fj−1 v − |v|φ Fj+1 − Fj
∂F
+
+
=0
(39)
∂t j
2
∆x
2
∆x
9
The mpde analysis of the above equation gives
∂F
∆x
∂F
+v
=
|v|(φF )xx + O ∆x2
∂t
∂x
2
Taking the Ψ - moments, we arrive at
Z
∂G
∆x
∂U
Ψ|v|(φF )xxdvdI + O ∆x2
+
=
∂t
∂x
2
R+ ×R
(40)
(41)
Numerical Analysis and Scientific Computing for PDEs
In terms of φ the modified split fluxes are easily defined as
Z
v ± |v|φ
±
Gm =
ΨF dvdI
2
(42)
R+ ×R
Obviously, from Eq.(41) as well as Eq.(42) it follows that φ = 1 gives Gm± = G±
KF V S ,
the usual KFVS fluxes, while φ = 0 leads to a central difference scheme. Thus, by
tuning φ such that 0 < φ ≤ 1 we can control the numerical dissipation and hence
order of accuracy.
5.2
Mathematical models for φ
Consider the mpde obtained in the Eq.(41). When Ψ = 1, the mpde corresponding to the mass balance equation is given by
"
#
r
Z
i
2
β 1 −β(v−u)2 −I/I0
∂
∂2 h
∆x
∂ρ ∂(ρu)
|v|φρ
+
= 2
e
dvdI = 2 νnum ρ (43)
∂t
∂x
∂x
2
π I0
∂x
R+ ×R
where νnum is the numerical kinetic viscosity given by
r Z
∆x β
2
νnum =
|v|φe−β(v−u) dv
2
π
(44)
R
From the above equation we observe that the absolute value of velocity, |v| is multiplied by velocity dependent exponential in the integrand on RHS of Eq.(44). For the
case of φ = 1, maximum contribution to the numerical viscosity comes from particles with velocities close to u, i.e., c = v − u ≈ 0. Particles with large |c| contribute
very little to νnum . If we can suitably weight the particles contributing maximum
to νnum , then we can reduce the numerical viscosity in the scheme. The control
function φ precisely plays this role. Obviously, φ must be a function of molecular
velocity v to achieve the objective, that is, to reduce νnum . We have considered two
choices,
α
φ = e− |v|
and
φ = e−α|v|
(45)
where α could be a mesh dependent function, which we will define later. For both the
choices, φ is an exponentially decaying function. Also, in the limit α → 0 ⇒ φ = 1
and α → ∞ ⇒ φ = 0, resulting in first order accurate KFVS and central differencing schemes respectively.
α
When φ = e− |v| , the control function φ is very small for particles with |v| close
to zero. Thus low velocity particles are not allowed to contribute significantly to
νnum . For |v| → ∞, φ → 1 and contribution to numerical viscosity comes from high
velocity particles whose number density is very small due to Gaussian distribution.
The parameter α is a characteristic velocity scale of the control function and low
and high ends of |v| are controlled by α. We can introduce non-dimensional control
parameter α̃ as
p
(46)
α = α̃/ β
S M Deshpande et al./ Rotational symmetry, low dissipation and weighted LSKUM
The other choice for control function is φ = e−α|v| . In this case low velocity particles,
that is, particles for which α|v| ≪ 1, or |v| ≪ α1 contribute most to νnum . Obviously,
particles for which α|v| ≫ 1, or |v| ≫ α1 will contribute very little to kinematic
numerical viscosity. Again, α−1 is a characteristic scale of the weighting function
e−α|v| . Thus, it is possible to weight the velocity space suitably for reducing the
dissipation.
Let us understand more about low and high velocity molecules. Consider the
steady 1D Boltzmann equation with a BGK - model for the collision terms
∂f
= A(F − f )
(47)
∂x
Here, f is the velocity distribution function, A−1 the relaxation time scale and F the
local Maxwellian velocity distribution function. Using the integrating factor eAx/v
we can write the solution of Eq.(47) as
Zx
A
A
′
(x−x
)
−A
0
+
(48)
f (x, v) = f (x0 , v)e v
F (x′ )e v (x −x0 ) dx′ , v > 0
v
v
x0
Similar formula can be written down for v < 0, but that is not required for making
the main point in the following argument. Assuming F (x′ ) to be a constant over
the interval x ≤ x′ ≤ x0 (which is ≃ ∆x), we get
i
h
−A
(x−x0 )
−A
(x−x0 )
v
v
f (x, v) = f (x0 , v)e
(49)
+F 1−e
It is clear from the above equation that the low velocity molecules are almost always lost (in the sense of loss term in the Boltzmann equation) while high velocity
molecules are lost negligibly, that is, they travel over ∆x without any collision.
Therefore, it makes sense in using a weight
function in velocity space which has
α
− |v|
is therefore consistent with the above
the above property. The choice of φ = e
−α|v|
physical argument. The second choice φ = e
leads to much simpler formulae for
9
split fluxes .
5.3
Results
The mKFVS scheme has been applied to standard convergent-divergent nozzle
problem. The results are compared with KFVS, and standard second order accurate
MacCormack scheme. Fig.4(left) shows the pressure distribution through the nozzle.
It has been observed that the mKFVS scheme is less dissipative and captures the
shock more accurately when compared to KFVS and the results are in very good
agreement with standard second order accurate MacCormack scheme. The mKFVS
was then applied to standard transonic airfoil test case. It can be easily inferred from
pressure contours Fig.5 and Cp plot Fig.4(right) that the mKFVS is less dissipative
and captures the flow features more accurately.
6
wLSKUM
In LSKUM for 2D, the system of equations that has to be solved to obtain the
value of the derivatives is
(50)
A (∇F )To = b
Numerical Analysis and Scientific Computing for PDEs
Pressure distribution through the nozzle
Cp plots of kfvs and mkfvs methods
1
1.5
kfvs
mkfvs
MacCormack
0.9
kfvs
mkfvs
1
0.8
0.5
0.6
−Cp
p/p−inf
0.7
0
0.5
0.4
−0.5
0.3
−1
0.2
0.1
0
0.5
1
1.5
2
2.5
3
−1.5
x
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
Figure 4: (Left)Variation of Pressure along nozzle (right) Cp plot
kfvs
mkfvs
Figure 5: Pressure contours for transonic airfoil test case (Left) KFVS (right) mKFVS
where,
P
P
P
2
∆x
∆F
F
∆x
∆x
∆y
T
i
i
xo
i
i
i
P
&b= P
, (∇F )o =
A= P
Fy o
∆yi ∆Fi
∆xi ∆yi
∆yi 2
(51)
The least squares matrix A obtained above has several interesting mathematical
and geometrical characteristics. First, the matrix A is purely a geometric matrix
containing the differentials of coordinates of nodes in the connectivity. This matrix
has to be inverted to find the derivatives at a node. This directly explains the
importance of the connectivity of the node in grid-free solvers. Second the matrix
A is a real symmetric matrix. We know that a real symmetric matrix has all real
eigen-values and a complete set of real & distinct eigenvectors. Thus we can obtain
an orthogonal basis. Third, if we rotate the coordinate frame from (x, y) to (x′ , y ′ )
such that each of the new coordinate directions is an eigenvector of A, we will obtain
a diagonalized matrix A′ . It is interesting to note that in this new rotated frame,
the least squares formulae for the derivatives reduce to the one dimensional formulae
along each new eigendirection. Considering the two dimensional example, the least
squares formula for the x-derivative in (x, y) frame is
P
P
P
P
∂F
∆y i 2 ∆xi ∆F i − ∆xi ∆y i ∆y i ∆F i
(52)
= Fxo =
P
P
P
∂x o
∆xi 2 ∆y i 2 − ( ∆xi ∆y i )2
P
Along the new coordinate directions,
∆x′i ∆yi′ = 0, so the above formula reduces
to
P
P
P
∂F
∆y ′ i 2 ∆x′ i ∆F i
∆x′ i ∆F i
P
P
P
=
(53)
=
∂x′ o
∆x′ i 2 ∆y ′ i 2
∆x′ i 2
which is one dimensional formula along the x′ direction.
S M Deshpande et al./ Rotational symmetry, low dissipation and weighted LSKUM
Let us study the advantages in using 1D formula. Consider a point distribution
obtained from uniform structured but highly stretched cartesian grid (∆y ≪ ∆x).
The derivative at some point Po considered from such a point distribution using least
squares method with the connectivity points containing standard 9 point stencil is
given by Eq.(52). It is easily observed that in the least squares matrix A for such a
connectivity the cross
term
P product
P in 2the matrix A vanishes. The eigen-values of
the matrix are now
∆xi 2 and
∆yi . Since ∆y ≪ ∆x the matrix A is highly ill
conditioned. Use of 2D formula Eq.(52) for such a case leads nearly to 0/0 singularity
because
X
X
X
∆yi 2 ≪
∆xi 2 ,
∆xi ∆yi = 0
(54)
P
Even when
∆xi ∆yi does not exactly vanish, it can be vanishingly small and
therefore the numerator and the denominator in Eq.(52) becomes difference between
two small numbers, thus leading to loss of accuracy in the estimate of the derivative.
However, use of 1D formula
P
P
∆xi ∆F i
∆y ∆F i
Fxo = P
Fy o = P i 2
(55)
2 ,
∆xi
∆y i
is free from such problem. Thus the same connectivity of points which was unable
to give accurate value of the derivative due to the ill conditioned matrix A now gives
accurate value of the derivative. The 1D formula works perfectly fine on a highly
stretched cartesian mesh. So the idea is to reduce the 2D least squares formulae
to 1D formulae by diagonalization of matrix A, then ill conditioning of A does not
pose any problem.
6.1
LSKUM with rotation along the Eigen directions
The eigen directions offer some advantages in least squares formulation. Consider
the 2D split Euler equation
∂G+
∂G−
∂G+
∂G−
∂U
y
y
x
x
+
+
+
+
=0
∂t
∂x
∂x
∂y
∂y
(56)
Each of the spatial derivative in Eq.(56) when discretized by the least squares
method has its unique least squares matrix A depending upon the split stencil used
to calculate the derivative. As a result, it is not possible to use the one dimensional
formula simultaneously for all the spatial derivatives. This can however be achieved
by weighted least squares along with use of the appropriate weights such that the
x and y directions become the eigen directions along which the higher dimensional
least squares formulae reduce to the corresponding one dimensional formulae.
The weighted and the unweighted least squares formula for the derivatives is
derived in an exactly similar manner. Minimising the weighted sum of the squares
of the error,
n
X
2
(57)
E=
wi ∆F i − ∆xi Fxo − ∆y i Fy o
i=1
where wi is the weight assigned to each node, with respect to Fxo and Fy o as before,
we get the following system of equations to be solved
A(w) (∇F )To = b (w)
(58)
Numerical Analysis and Scientific Computing for PDEs
where
P
P
P
w
∆x
∆F
Fx
wi (∆xi )2
wi ∆xi ∆yi
T
i
i
i
P
, b (w) = P
, (∇F )o =
A (w) = P
Fy
wi ∆yi ∆Fi
wi ∆xi ∆yi
wi (∆yi )2
(59)
It is desirable to have positive weights so as to retain the LED property of the
least squares formulae. It is interesting to note that an appropriate choice of the
weights can even change the nature of the matrix A. So an interesting question
naturally arises : Whether suitable weights can be chosen which favourably change
the condition number of the least squares matrix such that the solution accuracy
and robustness is improved ? The answer is affirmative. We will show later that
the weights can be suitably determined such that the weighted least squares matrix
A (w) is diagonal. It has been observed earlier that the diagonalization of the least
squares matrix reduces the multidimensional least squares formulae of the derivatives
to the one dimensional least squares formulae in the appropriate direction. It is
expected that A (w) with suitable weights will help in overcoming the problems of
10
bad connectivity to a great extent .
6.2
Calculation of weights for two dimensional least squares formulae
Consider x-y coordinates about a point of interest where we want to evaluate
the derivatives. It will have the standard four quadrants (I, II. III & IV numbered
anticlockwise). It is observed that the product of ∆x and ∆y is always positive in
quadrants I and III, while it is always negative in quadrants II and IV. Whenever
we are using x-y splitting, each split stencil involves two quadrants. One of the
quadrants always contributes to the positive product ∆x∆y while the other quadrant
always contributes to the negative product ∆x∆y. Suppose we want to find the
weights for the points in the left stencil only. It comprises of quadrants II and III.
Making
use of the above observation, we can easily obtain the weights such that
P
II+III wi (∆xi ∆y i ) = 0 while ensuring positivity of the weights. Let wII be the
weight assigned to the points lying in the quadrant II of the stencil while wIII be
the weight assigned to the points lying in the quadrant III of the stencil. We then
enforce
X
X
wIII
∆xi ∆y i
+ wII
∆xi ∆y i
=0
(60)
III
II
In terms of the above quadrant wise cross products, we get
P
( II ∆xi ∆y i )
wIII
=− P
(61)
wII
( III ∆xi ∆y i )
P
P
As per the observations made before : ( II ∆xi ∆y i ) < 0 & ( III ∆xi ∆y i ) >
0. From the Eq.(61) above, it is seen that the ratio of the weights obtained is
always positive as the product ∆x∆y is positive in quadrant III while it is negative
in quadrant II. The similar procedure can be applied to find the weights for the
derivatives using the points in any of the other split stencil : right, top or bottom.
6.3
Results
The method has been applied to standard subsonic airfoil test case and the pressure contours have been plotted in Fig.6. We can see that the flow features are
S M Deshpande et al./ Rotational symmetry, low dissipation and weighted LSKUM
Figure 6: (Left)Pressure contours for subsonic airfoil test case (right) Pressure contours for multipass and singlepass results overlapped
captured well. The wLSKUM was then applied to 4t h standard configuration of
turbine blade 3rd test case. The Fig.6 shows the pressure contours obtained for
multipassage computations and multipassage results generated by single passage
computations. It clearly shows that we have been able to simulate multipassage
computation with single passage computation.
7
Conclusions
The recent advances made in KFVS and LSKUM have resulted in a significant
improvement over the existing the algorithms. They have resulted in improvement
of accuracy, robustness and Hi-fidelity representation of the governing partial differential equations. The theory of fibre bundles provided a mathematical framework
to explain KFVS. The KFVS state update is now understood as a fibre connection.
Several interesting questions have been raised in the fibre interpretation of KFVS.
We are also able to achieve the rotational invariance using the directional derivative
and special flux vector splitting (SFVS) along each direction. The mKFVS makes it
possible to control the dissipation and gives nearly second order accurate results with
a first order difference formula. The use of weights in weighted LSKUM (wLSKUM)
to diagonalise the least squares matrix and hence reduce the multidimensional formulae to 1D formulae has resulted in a more robust solver. It has resulted in better
convergence characteristics and guaranteed the LED property of 2D LSKUM. Many
developments in the same direction are under way such as optimal control of dissipation, use of weights to achieve optimal bandwidth and maximising the benefits of
LSKUM by combining it with optimal shape design and problems involving multiple
moving boundaries.
It is a great pleasure to write this paper in honour of Oliver who has been my
friend for so many years. Oliver has been friend of India and has been collaborating
with a large number of Indian scientists in IISc, IIT, TIFR and other universities.
It can be said that he brought some aspects of French science to India and is a very
good example of international collaboration. We wish him very well in all future
endeavours and would love to see him in India more often.
Numerical Analysis and Scientific Computing for PDEs
REFERENCES
[1] S. M. Deshpande, Kinetic theory based new upwind methods for inviscid compressible flows, AIAA Paper no. 86-0275, 1986.
[2] A. K. Ghosh and S. M. Deshpande, Least Squares Kinetic Upwind Method for
inviscid compressible flows, AIAA Paper no. 95-1735, 1995.
[3] C. Praveen, Development and Application of Kinetic Meshless Methods for
Euler Equations, Ph.D. Thesis, Dept. of Aerospace Engg., Indian Institute of
Science, Bangalore, India, July 2004. To appear in Computers and Fluids.
[4] Keshav S. Malagi, ”Rotationally invariant kinetic upwind method (KUMARI)”,
MSc(Engg)thesis, Department of Aerospace engineering, Indian Institute of
Science, Bangalore, India.
[5] S. M. Deshpande, Meshless method, Accuracy, Symmetry breaking, Upwinding
and LSKUM, Fluid mechanics report, Report No. 2003 FM 1, Department of
Aerospace Engineering, Indian Institute of Science, Bangalore, India, 2003.
[6] Chris J. Isham, Modern Differential Geometry for Physicists, World Scientific
Publishing Co., 1989.
[7] S. M. Deshpande, On the Maxwellian Distribution, Symmetric Form and Entropy Conservation for the Euler Equations, NASA TP 2583, 1986.
[8] Keshav S Malagi, P S Kulkarni, S M Deshpande, KUMARI - Kinetic upwind
method with rotational invariance, Proceedings of The Eleventh Asian Congress
of Fluid Mechanics(11ACFM), May 2006, Kuala Lumpur, Malaysia. A37 pp.
326- 331.
[9] S M Deshpande, Anil N, Omesh Reshi Accurate numerical solution of Euler
equations by optimal control of dissipation. French-Indian Workshop on Numerical Simulation, Control and Design of Aeronautical and Space Applications,
INRIA, Sophia Antipolis, France, Nov 29-Dec 01, 2006
[10] Arora Konark, Rajan NKS, S M Deshpande, Weighted Least Squares Kinetic
Upwind Method using Eigen Vector Basis, Proceedings of 8th Annual AeSI CFD
Symposium, NAL, Bangalore, India.