CONTINUUM STRUCTURAL REPRESENTATION OF FLEXURE AND
TENSION STIFFENED ONE-DIMENSIONAL SPACECRAFT
ARCHITECTURES
by
Jeffrey James Larsen
A thesis submitted in partial fulfillment
of the requirements for the degree
of
Master of Science
in
Mechanical Engineering
MONTANA STATE UNIVERSITY
Bozeman, Montana
May, 2009
c Copyright
!
by
Jeffrey James Larsen
2009
All Rights Reserved
ii
APPROVAL
of a thesis submitted by
Jeffrey James Larsen
This thesis has been read by each member of the thesis committee and has been
found to be satisfactory regarding content, English usage, format, citations, bibliographic style, and consistency, and is ready for submission to the Division of Graduate
Education.
Dr. Christopher H. M. Jenkins
Approved for the Department of Mechanical Engineering
Dr. Christopher H. M. Jenkins
Approved for the Division of Graduate Education
Dr. Carl A. Fox
iii
STATEMENT OF PERMISSION TO USE
In presenting this thesis in partial fulfullment of the requirements for a master’s
degree at Montana State University, I agree that the Library shall make it available
to borrowers under rules of the Library.
If I have indicated my intention to copyright this thesis by including a copyright
notice page, copying is allowable only for scholarly purposes, consistent with “fair
use” as prescribed in the U.S. Copyright Law. Requests for permission for extended
quotation from or reproduction of this thesis in whole or in parts may be granted
only by the copyright holder.
Jeffrey James Larsen
May, 2009
iv
DEDICATION
I dedicate this work to my parents. They have shown me the true value of hard
work and determination. I am forever indebted to them.
v
ACKNOWLEDGEMENTS
I would like to thank Dr. Christopher Jenkins for introducing me to research
as an undergraduate and opening my eyes to a level of schooling I had never
considered before my senior year. I am deeply thankful for all of his help, insight,
and time that he put into this project. I would also like to thank Jeremy Banik
for his help and input on the project and allowing me to work with him for a
great summer in Albuquerque. Further thanks is necessary to thank those who
provided time and energy helping with this project; Dr. Doug Cairns and Dr.
Ladean McKittrick of Montana State University, and Dr. Thomas Murphey of
the Air Force Research Lab.
Funding Acknowledgment
The work herein was supported in part by the Air Force Research Laboratory
Space Vehicles Directorate through contract and the Summer Space Scholar
program.
vi
TABLE OF CONTENTS
1. INTRODUCTION ........................................................................................1
Structural Architectures ................................................................................1
Dimensional Architectures .............................................................................2
One-dimensional Representation ....................................................................5
Design Impact ..............................................................................................6
2. LITERATURE REVIEW ..............................................................................7
Vibrations ....................................................................................................7
String-Beam Systems .................................................................................. 10
Deployable Structures ................................................................................. 12
3. FINITE ELEMENT MODEL ...................................................................... 14
ABAQUS Support Model Setup ................................................................... 14
ABAQUS Support-Payload Model Setup ...................................................... 17
Payload Support Model for N greater than 2 ................................................ 19
4. MATHEMATICAL MODEL........................................................................ 21
Model Development .................................................................................... 21
Coupled Beam-Sting Equations.................................................................... 22
Support Equation.................................................................................... 22
Boundary Conditions ........................................................................... 25
Support Solution ................................................................................. 26
Payload Equation .................................................................................... 26
Payload Boundary Conditions .............................................................. 27
Payload Solution ..................................................................................... 28
System Coupling ................................................................................. 28
System Solution ...................................................................................... 29
Decoupled Boundary Conditions .................................................................. 30
Beam-Beam Equation Derivation ................................................................. 33
Beam-Beam Support Derivation ............................................................... 33
Beam-Beam Payload Derivation ............................................................... 34
5. RESULTS .................................................................................................. 38
Numerical Results ....................................................................................... 38
Analytical Results....................................................................................... 38
Numerical vs Analytical........................................................................... 43
Expanded Numerical Results ....................................................................... 43
vii
TABLE OF CONTENTS – CONTINUED
System Relationships............................................................................... 47
6. CONCLUSION ........................................................................................... 56
REFERENCES CITED.................................................................................... 59
APPENDICES ................................................................................................ 62
APPENDIX A: ABAQUS FEM Code ........................................................ 63
APPENDIX B: Solution and Constant Validation ...................................... 68
viii
LIST OF TABLES
Table
Page
1
Verification of ABAQUS Beam Model................................................... 16
2
Member specific material properties and general system properties ......... 40
ix
LIST OF FIGURES
Figure
Page
1
Examples of stiffened architectures with (a) tension and (b) flexure ..........2
2
Examples of structural architectures for (a) one-dimension and (b) twodimensions ............................................................................................3
3
General representation of one-dimensional architecture model ..................4
4
General configuration to encompass all possible 1 and 2 dimensional
architectures .........................................................................................4
5
General representation of the payload-support interaction ........................5
6
Sytem variable relationships and interactions. .........................................6
7
Beam-String model developed for nonlinear analysis .............................. 10
8
Beam-String model developed for a fiber optic coupler........................... 12
9
Model Representation of ABAQUS Support only model......................... 16
10
Comparison and validation of ABAQUS approach ................................. 17
11
General Representation of Support-Payload model for N=2 ................... 18
12
ABAQUS representation of the interaction between the payload and
support for N=2.................................................................................. 19
13
The general support-payload model for N = 3 ....................................... 20
14
The representation of the ABAQUS support-payload model for N = 3 .... 20
15
Forces and moments acting on a differential element of the beam ........... 22
16
Comparison of system frequency based on a full range of load and mass
ratios.................................................................................................. 39
17
Comparison of system frequency for mass ratios of interest .................... 39
18
Sample curve of the characteristic equation to determine zero crossings
for the beam-string model .................................................................... 41
19
Frequency values of the beam-string model over range of load ratios ....... 41
20
Sample curve of the characteristic equation to determine zero crossings
for the beam-beam model .................................................................... 42
21
Frequency values of the beam-beam model over range of load ratios ....... 42
x
LIST OF FIGURES – CONTINUED
Figure
Page
22
Results for Mass Ratio of 100:1 ............................................................ 44
23
Results for Mass Ratio of 10:1.............................................................. 44
24
Results for Mass Ratio of 1:1 ............................................................... 44
25
Results for Mass Ratio of 1:10.............................................................. 45
26
Changes in system mode shape as the payload tension is increased for
a mass ratio of 1:20. ............................................................................ 46
27
Comparison of individual member frequencies to system frequency ........ 48
28
Effects of changes in system variables ................................................... 49
29
Variation of length as the total mass is increased at a fixed frequency
(f1 > f2 > f3 ) ..................................................................................... 51
30
Comparison of numerical data with approximate equation ..................... 52
31
Variation of frequency as the number of ties is increased ........................ 53
32
Converging frequency curves for several mass ratios as the number of
ties is increased ................................................................................... 54
33
Effect of number of ties on frequency for a range of load ratios............... 55
xi
NOMENCLATURE
A
a
E
f
i
I
k
L
M
MR
m
N
t
P
Pcr
w
β
λ
µ
ω
ρ
Cross-section Area, m2
Payload Load Parameter
Elastic Modulus, Pa
Frequency, Hz
Mode Number
Area Moment of Inertia, m4
Load Parameter
Length, m
Total Mass, kg
Mass Ratio also written as ms : mp
Component Mass, kg
Number of Ties
Time,sec
Axial Load, N
Critical Buckling Support Load, N
Displacement, m
Non-Dimensional Frequency Value
Frequency Parameter
Mass per unit length, kg/m
Frequency, rad/s
Density, kg/m3
Subscript
p
Payload Component
s
Support Structure Component
xii
ABSTRACT
Spacecraft designs are a result of system properties and design variables that
ensure the spacecraft will operate to mission objectives. The focus of this effort
is a set of global system variables for frequency, length, total mass and the ratio
between the payload mass and the support structure mass. These properties will be
explored to observe the behavior of the system and develop relationships that govern
the trade-offs between the variables and assist mission planners in future spacecraft
design.
These variables will be observed in one-dimensional structures where the dominating dimension is many times larger than the other two dimensions and the system
is comprised of a support and a payload member. To observe the interaction between
the payload and the support, the system was varied for different system variables and
observed through ABAQUS finite element software. Attempts were made to predict
the system frequency through mathematical approaches.
The finite element work was able to generate several approximate relationships
between the system variables and the fundamental natural frequency of the system.
From these relationships an approximate equation was developed for the frequency
for a fixed mass ratio and load ratio as a function of the length, bending stiffness,
and total mass of the system. Additional work into the changes to the system as
the number of connect points is increased shows the system converging towards a
frequency solution which results in a minimized dependence on the connection points.
These results were then compared to those of several derived analytical models to
determine if a closed-form solution could be used to predict system behavior over the
same range of structural characteristics. This closed form solution proved to correlate
well to analytical predictions only for the case where the support structure dominates
the total system mass, and thus the structural system performs like a beam under
compression. Further work is necessary to accurately predict the system frequency
through an analytical approach.
These insights promise to aid mission designers in objectively evaluating new
structural architectures based on structural performance rather than on an unbalanced adherence to heritage or in some cases personal preference.
1
INTRODUCTION
Structural Architectures
In spacecraft design and modeling, several variables are key influences to selecting
the proper structural architecture for a specific application. Most spacecraft have deployable appendages, blankets, or panels included to serve mission objectives. These
deployable components can be designed in a variety of geometries and configurations.
Examples of these include solar sails, sun shades, antennas, solar arrays, and phased
arrays. These deployable payloads are often supported through two main stiffening
methods, tension and flexure. These methods are often used independently but can
be used in combination depending on the design of the structure. This selection of
the stiffening method is defined as the structural architecture.
The requirements of the system often dictate how the design will support the
payload. Figure 1 shows two examples of how these stiffening methods are used
in practice. In Figure 1a the Space Station Solar Arrays uses the tensioned in the
arrays to create a compression in the mast of the system which effectively stiffens
and supports the arrays. Figure 1b shows the Radar Sat II which carries solar arrays
through a backing structure that uses the high bending stiffness to support the array.
A combination of the two methods would incorporate both the generated compressive
force and the present bending stiffness to reach the necessary support for the payload.
The selection of the structural architecture can be further seen by observing the
interaction between the payload and the support. Figure 1a can be seen to be connected in two places between the payload (the solar array) and the support (the mast)
at both ends. The solar array has no bending stiffness but is tensioned to allow for the
solar panels to effectively collect the sunlight. Similar to the bow and cord concept [3],
!"#$%&%$'%()*+,&-.##/0*1023##24*3##5678#3
2
THE RADARSAT-2 SPACE
(a) Tension stiffening of the Space
Station Solar Arrays[1]
(b) Flexure
stiffening
of the
RadarSat
II[2] the follow-on to Radarsa
Radarsat-2
is Canada’s
next-generation
commercial
SAR satellite,
1995.
Radarsat-2 is a unique collaboration between govemment – the Canadian Space Agency,
Figure 1: Examples of stiffened architectures
with
(a)and
tension
(b) Asflexure
MacDonald,
Dettwiler
Associatesand
Ltd. (MDA).
prime contractor for the Radarsat-2
responsible for all facets of the program including development and operation, syste
integration and test, launch and commissioning of the spacecraft, operations planni
segments.
as the cord is pulled back the stiffness of the bow is increased. This tension causes
Radarsat-2 has been designed with significant and powerful technical advancements that in
resolution
imaging,creates
flexibility in
selection
of polarization,
left and right-looking imaging o
an equal and opposite compression in the mast
which
the
required
stiffness.
data storage and more precise measurements of spacecraft position and attitude.
The stiffness generated in the RadarSat II occurs from the backing structure
Spacecraft
that holds the solar array. Picture the back
of Fig. 1b as the bow Synthetic
and cord
Typeside
of Satellite
Aperture Radar (SAR)
Stabilization
3 Axis
Bus Contractor
Thales Alenia Space
Design Lifetime
7.25 Years
example but with an infinite number of connections.
cord)
Prime Contractor Now the payload (the
MacDonald,
Dettwiler and Associates Ltd.
becomes inherently stiffness from the bending
stiffness
of the bow. By changing
Launch
Weight
2200 kg the
properties of the support the stiffness of theDimensions
systemof SAR
canantenna
be modified. The 15potential
m x 1.5 m
: Solar Arrays
2400 Watts at EOL
for a combined stiffness method can be hadElectric
by Power
varying
the number of connection
Performance Specifications of SAR Antenna
points between these two and infinite boundaries.
Frequency Band
C-Band (5.405 GHz)
Channel Bandwidth
100 MHz
Channel Polarization
Dimensional Architectures
HH, HV, VH, VV
Maximum Orbit Average Power consumption
745 Watts at EOL
Imaging Spatial Resolutions
3 meters-100 meters
The architectures can be further broken down into the dimensional components the
MORE INFORMATION CONTACT :
system occupies. Of interest here are the oneFORand
two
dimensional architectures. The
Hans Baeggli
Email : hhb@mdacorporation.com
www.mdacorporation.com/spacemissions
one-dimensional space structure is defined where the linear dimension is many times
greater than the width or thickness. DARPA’s Innovative Space-based
radar Antenna
Visit us on
www.starsem.com
7
"! #$%&$'()*(+,$($-&.+&/0(.)12#(.2&1(
3$41)56$/+(+$7,/)1)05(
"8!
+##+2$*5%#-%#$*%Y--40:%#$*%F-B.%0+97%0*84*)#0%L*.*%FB773%
3
5*17-3*5%#-%+11.-T94+#*73%!C4%T%!C4%P0**%I98O%>QO%
!9(:(!9;(<=>?@AB?=@(6B@>C(3>D>CBE;>FG(
EB.9)8%#$*% F9.0#%-)@8.-B)5%5*17-34*)#%-F% #$*% '-7+.%'+97%
.*+5G-+.5% 4-5*7% 9)% ?HHH:% F-B.% <IJK% G--40% L9#$% +%
*)8#$% -F% ?M4% *+2$% L*.*% B).-77*5% F.-4% #$*% 2*)#.+7%
E*17-34*)#% =-5B7*% +)5% 0BG0*NB*)#73% #$*% F-B.% F-75*5:%
.9+)8B7+.% 0+97% F974% 0*84*)#0% L*.*% .*7*+0*5% F.-4% '+97%
<-)#+9)*.0O%6$*%G.*+5G-+.5%4-5*7%90%0$-L)%9)%I98O%?%9)%
#0% 0#-L*5% P7+B)2$Q% 2-)F98B.+#9-)% 1.9-.% #-% 5*17-34*)#O%
6$*% 0#-L*5% R-7B4*% -F% #$*% E*17-34*)#% =-5B7*% 90% -)73%
C24%T%SC24%T%SC24O%6$*%#-#+7%4+00%-F%#$*%E*17-34*)#%
!
=-5B7*:% 9)27B59)8% G--40% +)5% #$*%(a)0+97%
4*4G.+)*0:%
90%
DARPA’s ISAT[4]
(b) DLR Solar Sail[5]
I98O%>X%'-7+.%'+97%FB773%5*17-3*5%
D/8% U?:!:>VO% 6$*% 4+9)% 0#.B2#B.+7% *7*4*)#0% -F% #$*%
P+11.-TO%!C4%T%!C4Q%
E*17-34*)#% =-5B7*% Figure
+.*% 4+5*%
-F% <IJK%of 1+.#0%
#-% architectures for (a) one-dimension and (b) two2: Examples
structural
&+2$%0+97%0*84*)#%90%+%.98$#%90-02*7*0%#.9+)87*%1.-R959)8%
49)949W*%4+00O%
dimensions
+)% +.*+% -F% "!OS% 4\O% 6$*% 09W9)8% -F% #$*% 0*84*)#0% L+0%
G+0*5%-)%#$*%#.9+)8B7+.%01+2*%1.-R95*5%G*#L**)%*+2$%-F%
Technology (ISAT) [4], Fig. 2a, is an example
of <IJK%
a one-dimensional
The-F%two#L-% ?M4%
G--40% L9#$% structure.
2-)095*.+#9-)%
27*+.+)2*%
+)5% 2-))*2#9-)% .*NB9.*4*)#0O% 6$.**% 59FF*.*)#% F974%
dimensional space structure is similarly defined where the linear and width dimensions
4+#*.9+70%L*.*%B0*5%F-.%#$*%0+97%0*84*)#0X%
are many times greater than the thickness
and the linear and width dimensions are
!! ?!OC%"4%=37+.:%(7@2-+#*5%-)%-)*%095*%
of a similar order of magnitude. The !!
DLR]OD%"4%^+1#-):%(7@2-+#*5%-)%G-#$%095*0%
solar sail [5], Fig 2b, is a good example of
!! MOC%"4%K&_%PK-73*#$37*)@)+1$#$+7+#*Q:%%
(7@2-+#*5%-)%G-#$%095*0O%
the two-dimensional structure.
6$*%4+9)%-G`*2#9R*%F-.%B09)8%59FF*.*)#%4+#*.9+70%
As a result of the stiffening methods,
and the variation of the dimensions to aL+0%#-%
+00*00%#$*%F974%$+)579)8%+)5%1.-2*009)8:%+)5%#-%*R+7B+#*%
4+#*.9+7%
G*$+R9-.% F-.%
0*+49)8:%
F-759)8:%
+0% L*77% +0%
degree, a general architecture can be#$*%
created
to encompass
a vast
majority
of these
F-.%0+97%5*17-34*)#O%
!
space structures. Then by simply modifying the properties of this general architecture
I98O%?X%'-7+.%'+97%E*17-34*)#%=-5B7*%
(0% +% 2-41.-490*% G*#L**)% 0*2B.*5% #.+)01-.#+#9-)% 9)#-%
01+2*:% Figure
2-)#.-77*5%
5*17-34*)#%
+)5% #$*% 1*.F-.4+)2*%
9)%
a
specific
design
can
be
effectively
modeled.
3a shows
the one-dimensional
case
6$*% 5*17-34*)#% L+0% 2+..9*5% -B#% B)5*.% 094B7+#*5% C@8%
5*17-3*5%
2-)F98B.+#9-)%
5*17-3+G7*%
G--40%
PB)2-97*5%
)5% +4G9*)#% *)R9.-)4*)#+7%
L9#$9)% 2+O%
where 2-)59#9-)0%
the bars between
the >C%
payload and
represent
the.*9)F-.2*5%
connection
F.-4%support
+% .-77Q:%members
4+5*% -F% 2+.G-)%
F9G.*%
17+0#920%
49)B#*0% P?D49)% F-.% Y--4% 5*17-34*)#:% ?D49)% F-.% '+97%
P<IJKQ:%
L*.*%
2$-0*)%
F-.%
#$*%
G+0*79)*%
&'(;EZJ%
'-7+.%
*17-34*)#Q% +#% #$*% &B.-1*+)%
<*)#*.%
+#% EZJ%
points.(0#.-)+B#%
This system
can
quickly and easily be modified for the tension or flexural
'+97% 5*098)O% 6$*% G--40% 2-)090#% -F% #L-% 7+49)+#*5%
<-7-8)*O%I98%!%0$-L0%#$*%0#+#B0%L$*.*%#$*%G--40%L*.*%
F7*T9G7*%#@0$+1*5%0$**#0%L$92$%+.*%G-)5*5%+#%#$*%*58*0%
stiffening
mechanisms
by .9895%
changing the
number of ties. The Space Station Solar
B773% 5*17-3*5% #-% +% 7*)8#$%
-F% ?M4:%
1.-R959)8% #$*%
#-%
F-.4%
+% #BGB7+.% 0$+1*% P0**% I98O% MQ% UM:D:SVO% 6$*3%
#.B2#B.*%F-.%#$*%0BG0*NB*)#%0+97%4*4G.+)*%5*17-34*)#O%
Arrays, shown in Fig. 1a, can be treated
as a one-dimensional
tensioned
2-4G9)*%
0#.*)8#$% +)5% 0#9FF)*00%
L9#$%architecture
7-L% 5*)09#3% +)5:%
1.*00*5%F7+#%+)5%2-97*5%+.-B)5%+%2*)#.+7%$BG%F-.%0#-.+8*%
and would be represented by Fig. 3b L9#$9)%
with two
connection
points.
+% #98$#%
R-7B4*:%
#$*3% 2+)% G*% B)2-97*5% F.-4% #$*%
2*)#.+7%$BG%F-.%5*17-34*)#O%%
The two-dimensional representation shown in Fig. 4a shows a top down view of the
system with the payload and connection points to the support shown. The DLR solar
4
+,-.$,/
+,-.$,/
'()*(%
'()*(%
!"##$%&
!"##$%&
'()*(%
'()*(%
(a) One-dimension general case
(b) One-dimension specific case
Figure 3: General representation of one-dimensional architecture model
(a) Two-dimension general case
(b) Two-dimension specific case
Figure 4: General configuration to encompass all possible 1 and 2 dimensional architectures
sail, Fig 2b, could be mapped by reducing the general case to Fig. 4b. The general case
can be modified to accommodate a wide range of shapes including circles, rectangles,
and triangles. By gaining insight into these general cases system designs could easily
work with the different architectures to observe the best design out of an array of
varying options.
8
5
52+3()"677.$#0(12342$
"677.$#(12342$
*+,-.+/(12342$
Figure 5: General representation of the payload-support interaction
One-dimensional Representation
The focus of this work investigates the tradeoffs between critical design variables
for the one-dimensional structural architectures. The system is treated as acting
along a single axis to simplify the model as shown in Fig. 5. This allows a tensioned
payload to create a compressive force in the support member without concern for
significant deflections occurring in either member. To aid in the ease of understanding
the same model is shown in Fig. 6 where the payload and support are separated.
This allows for the the individual payload and support components to be shown and
how each contributes to the overall global variables. Each component contributes a
bending stiffness, length, and mass to the system. The bending stiffness, represented
by EI, where E is the elastic modulus and I is the area moment of inertia, will
always be present for the support structure but can be set to zero for payloads that
provide no bending stiffness, such as tensioned membranes. The payload and support
components are tied together with N number of ties depending on system needs. In
addition to the stiffness achieved through the bending stiffness, the system can also
be stiffened though a tensioned payload, the tension defined by P. Based on these
variables, the global system can be defined through length, L, total mass, M, the
mass ratio between the support mass ms and the payload mass mp , ms :mp , and the
overall system frequency f .
()**%+,'
7'
!"#$%"&'
6
!"#$%"&'
-./0*1213*'
!'
!'
21'51'3463*!"#'
7'
!'
!'
()**%+,'
-./0412134'
Figure 6: System variable relationships and interactions, shown for N = 5.
Design Impact
By modifying the component variables, number of ties, and tension force the
changes to the global system performance can be observed. The focus of the system
performance is on the system natural frequency as this has the biggest impact on the
operating conditions of the spacecraft and is less predictable than the other system
variables. Length, total mass, and mass ratio are often dictated by the mission
requirements but potentially have some flexibility for a given system. These values
will be modified to observe the changes to the frequency and look for trends between
these changes. Further work will be developed through numerical and analytical
approaches to gain insight and attempt to predict these outcomes.
This work is the start of a new set of design tools for spacecraft designers. By
giving flexibility to the designers the work will allow for a variety of options to be
investigated and considered before the design selection occurs. It aims to break down
some of the design approaches that are based on heritage rather than new options.
This work focuses on the one-dimensional architecture to gain an understanding of
how these tools can be developed through the simplest case. With this insight the
work will be expanded into the two-dimensional architecture which will be able to
incorporate the majority of existing designs.
7
LITERATURE REVIEW
Vibrations
A focus of this thesis has been on the fundamental operating frequency of the
payload and support members of the designs. Previous work can be seen in several
areas of published literature. Derivations and work with individual beams, work on
coupled systems between beams and strings, and work in one-dimensional architectures. Initially, the work started in independent fashion using closed form frequency
models and then coupled as a system using numerical analysis and minor references
to previous work. This work could then be applied to existing models and designs.
Numerous works have investigated the vibrations of beams and the effect of axial
loads on the frequency. Gorman [6] presented a concise summary of vibrational
analysis of beams with various boundary conditions and problem variations. Gorman
presents detailed derivations and tabular data associated with each condition.
Building on Gorman’s work, Belvins [7] presents formulas for the frequency of a
variety of structures and fluids, of interest here is the sections on cables and beams.
For straight cables, similar to treating the payload with bending stiffness, Belvins
notes the frequency as Eq. 1:
i
fi =
2L
! "1/2
P
µ
i = 1, 2, 3, . . . ,
(1)
where µ is the mass per unit length of the beam and the index i is the mode number.
The focus of the cables section in Belvins however is on the influence of sag in the
cable on the frequency. The thorough section on beams provides several useful formulas. For a simple single span beam with free-free boundary conditions the natural
8
frequency is given as Eq. 2:
λ2i
fi =
2πL2
!
EI
µ
"1/2
i = 1, 2, 3, . . . ,
(2)
where the parameter λi is numerically determined. Of interest for this project is
the first fundamental frequency where λ1 = 4.73004. Equation 2 also holds true for
multispan beams with pinned intermediate supports but the length is treated as the
effective length of the beam between each span. The λ term is again numerically
determined and varies depending on the number of spans in the system and the mode
of interest.
Belvins provides exact solutions to the frequency parameter, λ, for beams with
an axial load under several boundary conditions other than the free-free condition
and a few others. Further, Mukhopadhyay [8] gives the equation for the fundamental
frequency of a pinned-pinned beam with an axial load in Eq. 3 but no equation is
presented for the beam with an axial load and the free-free boundary conditions.
π
f1 =
2
#
EI
ρAL4
!
"
P
1±
,
Pcr
(3)
where ρ is the mass density, A is the cross-sectional area, and Pcr is the Euler (critical)
buckling load of the beam. For the cases without exact solutions, Belvins presents
the following approximation, Eq. 4:
fi |P !=0
=
fi |P =0
!
P λ21
1+
|Pcr | λ2i
"1/2
i = 1, 2, 3, . . .
(4)
Continuing with focused work on the effect of axial on beams, Shaker [9] presents
a detailed derivation of the beam equation with an axial load for various boundary
9
conditions. The derived equation of motion for the beam with a compressive axial
load is given as Eq. 5:
EI
∂ 4 w(x, t)
∂ 2 w(x, t)
∂ 2 w(x, t)
+
P
+
µ
= 0,
∂x4
∂x2
∂t2
(5)
where x and t are the spatial and temporal variables of the beam and w is the
displacement in the direction normal to the x axis. Without the presence of the axial
load the boundary conditions of a free-free beam are zero shear and moment. Shaker
shows the effect of the axial load on the boundary conditions where the moment is
still zero but the shear becomes Eq. 6:
$
d3 w
2 dw
+
k
dx3
dx
%
$
=0
x=0
where k is the load parameter defined as Eq. 7:
k2 =
d3 w
2 dw
+
k
dx3
dx
%
= 0,
(6)
x=1
P
.
EI
(7)
Working through the derivation Shaker provides the characteristic equation for the
beam with a compressive axial load as Eq. 8:
' 6
(
2β (1 − cos α2 cosh α1 ) + k 2 (k 4 + 3β 4 ) sin α2 sinh α1 = 0.
(8)
Additionally, Galef [10], Pilkington [11], and Bokaian [12] provide further background
and results of axially loaded beams.
As the characteristic equation (8) can not be solved for a closed form solution,
numerical methods must be used to determine the non-dimensional frequency value,
β. Discussing an effective method for determining β, Liu [13] used computer software
10
to determine the values of β and allow for a range of tensions to be evaluated. Lui
further discusses the steps taken towards approximating equations that can be used
to solve for β.
String-Beam Systems
Attempts to model one-dimensional architectures consisting of the payloadsupport interaction represented with a beam-string model yielded several examples of
previous models. A variety of work has been done on the cable-stayed beam structures
by Gattulli [14] and [15] and others. Cable-stayed structures are discussed in relation
to pretensioned structures by Jones et al. [16] and [17] as a means for providing
additional stiffness to the structure.
Models based strictly on the beam-string coupling produced little results. Cao
and Zhang [18] and [19] produced work on the nonlinear dynamics of a beam-string
model. While similar to the model discussed in Chapter 1, this work incorporates a
harmonic loading and boundary conditions supported by springs (Fig. 7). The governing equation developed for Fig. 7 has many similarities to the equations of motion
developed for the one-dimensional string-beam model. Using the same notation as
Bifurcation and Chaos of a String-Beam Coupled System 133
1. The simplified
model ofdeveloped
a sting-beam coupled
system: (a) the analysis
physical model; (b) the top view of the system.
Figure 7: Figure
Beam-String
model
for nonlinear
Under these assumptions, the governing equations of motion for the string-beam coupled system are
obtained as follows [18]:
m1
!
$
" #
∂ 2 w1
∂ 4 w1
∂w1
E A l ∂w1 2
+
E
I
+
c
−
F
cos
"
t
+
dx
−
P
1
0
2
2
∂t 2
∂x4
∂t
2l 0 ∂ x
%
$
&'
" #
11
the beam equation of motion Zhang gives Eq. 9:
$
"2
) !
∂ 2 w1
∂ 4 w1
∂w1
EA L ∂w1
µ1 2 + EI
+c
− P0 − F2 cos Ω2 t +
dx
∂t
∂x4
∂t
2L 0
∂x
*
"2 + % 2
) !
Ks L ∂w2
∂ w1
+ T0 +
dx
= µ1 F1 cos Ω1 t
,
2 0
∂x
∂x2
(9)
where the material properties are defined as previously mentioned w1 is the displacement of the beam and w2 is the displacement of the string, Zhang also adds an axial
harmonic excitation through P0 and F2 , and a fundamental vibration to the system
through F1 .
Equation 9 can be simplified to the equation of motion Eq. 5, presented by Shaker
by removing the damping term, c, the harmonic forcing functions, F1 and F2 , and
the nonlinear dynamic term for the tension. For the nonlinear dynamic analysis the
tension in the string is said to vary with the deflection as a function of time but not
position [20]. Treating the analysis as a linear dynamics problem removes term the
following term from Eq. 9:
)
0
L
!
∂w1
∂x
"2
dx.
(10)
Equation 9 is shown as a method for verifying the approach used to construct the
model in this thesis. The model developed by Zhang [18] goes on to represent the
nonlinear dynamics of the model for the forced and harmonic loadings applied.
The beam-string model was also used to model a fiber optics system (Cheng
and Zu [20]). This model represents a fiber optic coupler where optic fibers are
bonded to a substrate. Treating the substrate as a beam member and the fibers
as a string member, the configuration can be seen in Fig. 8. While the the system
doesn’t incorporate the payload tension in the string member, it does incorporate the
increased number of ties that will be investigated. Cheng and Zu work through both
ARTICLE IN PRESS
12
G. Cheng, J.W. Zu / Journal of Sound and Vibration 268 (2003) 15–31
17
y1 , y 2
String: y2
Beam: y1
O
x
L0
L0
K
K
l
Shock motion ys
Fig. 2. A simplified model of an optical fiber coupler.
Figure 8: Beam-String model developed for a fiber optic coupler
that of the optical fibers, under a half sine shock, and on the analysis of the influence of various
coupler parameters upon the response of the optical fibers.
linear and nonlinear dynamics of the problem and work to decouple the boundary
conditions to focus on the string response.
2. Dynamic analysis of the substrate
Considering the material construction and the size of the substrate and the optical fibers in a
Deployable
Structures
coupler, it is reasonable to model them
as a beam
and a string, respectively. In the following
discussion, two assumptions are made: (1) the influence of the string on the vibration of the beam
is neglected so that the equation of motion for the beam, together with its boundary conditions, is
independent.
(2) axial
of the beam
and of thethe
string
is negligible,
and only
their
In developing
thevibration
design variables
for monitoring
changes
in the system
behavtransverse vibration is considered.
The
system is subjected
to goes
a halfinto
sinethe
shock
motion
its length process
whose acceleration
ior, whole
an understanding
of what
design
andalong
development
is a must. is
in the form
Hedgepeth [21] presents a good
requirements
of Large Space Structures
2 overview of the !
"
d ys ðtÞ
p
¼ F sin ot
0ptp
;
ð1Þ
2
dt
o
(LSS). Detailing stiffness and precision requirements, member slenderness, and design
where ys is the displacement of the base of the system, as shown in Fig. 2, and F, o are the
examples, Hedgepeth offers insight to the factors are to be considered for any quality
amplitude and the circular frequency of the acceleration, respectively. In this study, the shock
motion
is assumed
to beLake
a 1000
ms brings
half sinethe
oneideas
which
is commonly
adopted in industry.
spacecraft
design.
et gal.0.5[22]
presented
by Hedgepeth
towards It
should also be pointed out that only the response during the shock period is considered as this is
thethe
time
when the
optical
fiber breaks
occur.
current
design
methods.
Lakeusually
presents
solutions to the fundamental issues that
Let y1(x, t) be the beam deflection and y2(x, t) be the string deflection, where x is a position
variable,
as shown
in Fig.for
2. the
The design
equation
motion for the beam during 0rtrp=o is derived as
must be
considered
of of
LSS.
4
2
@x4
@t2
@ y1
@ y1 and structural architectures used in deMurphey [23] discusses
þ r 1 A1
¼ %r1 A1 F sin ot;
ð2Þ
EJ the deployment
ployable structures. He introduces the fundamental principals of mast design through
concepts of mass efficiencies and boom optimizations,among other things. Recently
13
work has been focused on increasing the understanding of the deployable structures.
Mikulas et al. [3] focused on the tension stiffened architectures and the effects of
packaging and deployment in one and two-dimension applications.
Focusing specifically on the pretensioned structures, Jones et al. [16] began detailing the effects of pretension on a system relative to the mass ratios among other
things. This system was followed with the presentation of the relationship between
tension and the mass [17]. The results from Jones allowed for the development of the
work herein by providing a basis to build on.
14
FINITE ELEMENT MODEL
ABAQUS Support Model Setup
To gain an understanding of how the system behaves, a simple model was designed
through ABAQUS finite element modeling software. Working with free-free boundary
conditions, the support only model and the support-payload model were analyzed and
verified through comparisons with closed form solutions. The work presented in this
chapter was started as a model based on fixed-free boundary conditions but as the
work progressed this was seen to be an inaccurate representation of the supportpayload model. Working with the fixed-free boundary conditions would be looking
at half of the structure where the payload and support would be attached to a base
member. Working with structures on a large scale, possible over 100 meters, a base
member would be very small relative to the system. As a result looking at the full
scale of the model and treating the base member as part of the mass of the support
yields a free-free system with more flexibility and an improved representation of a
realistic model. Further, Hedgepath [21] notes that the assumption can be made that
the flexible part of the structure will be the dominant part of the system and free-free
boundary conditions are accurate.
The work on the free-free support-payload model was started through the analysis
of the support member alone. The support member was verified for frequency and
buckling values through ABAQUS methods and compared with the relevant equations. The model was then modified to incorporate the payload member. Due to the
complexity of the system no previously published work has addressed the analytical
definition of this coupled system. As a result, a comparison was made with the work
15
published by Jones et al. [17] as noted in Chapter 2 and similar methods were used
as Jones et al. presented on the finite element approach to this problem [16].
The beam members used herein fall into the category of a slender Euler beam
and are based on the assumptions given for the Euler-Bernoulli beam theory [24].
The beams are uniform along the span and composed of a linear, homogeneous, and
isotropic elastic material. The beam meets the necessary slenderness ratios where
the cross sectional dimension is much less than the length of the beam or the distance between the connection points. At high values of the number of ties (i.e. as N
approaches infinity) the slenderness ratio could pose issues with the accuracy of the
model, but this work shows this issue is minimized as the solution converges towards
solution regardless of the number of ties before the slenderness ratio is violated. The
deformation is only considered in the normal direction to the beam axis and the
transverse shear strain is neglected. Further the maximum load that can be applied
to the beam is the Euler (critical) buckling load as defined in Eq. 11:
Pcr =
π 2 EI
L2
(11)
From these beam assumptions the support only model was set up using 50 B21H
elements. The B21H elements are hybrid two node beam elements which allow for
displacement and rotation in two directions. The material properties were set for an
arbitrary material type with the notion that the model will be non-dimensionalize
and applicable for all materials and geometric properties. Material properties were
specified through the *BEAM GENERAL SECTION command which required inputs
for area, moment of inertia, density, and elastic modulus among others.
To simulate the prestress loading in the payload a compression load (Fig. 9) was
applied at each end node through the concentrated load command, *CLOAD. The
16
"#
!
!
$#
Figure 9: Model Representation of ABAQUS Support only model
load value was applied over a range of values from zero to the critical buckling load.
From this model two calculations were performed through two individual steps for
frequency and buckling load. Each step was treated as a non-linear geometry to
meet the criteria of ABAQUS. Initial models were run with linear geometries as this
appeared to be the appropriate case for the system. After consulting the ABAQUS
manuals it was determined that the non-linear geometry must be used to achieve the
desired results for the frequency and buckling calculation steps. The ABAQUS code
code for the support model can be seen in Appendix A.
The accuracy of the model is presented in Table 1. Equations 2 and 11 were used
to calculate the numerical values for frequency and buckling load in Table 1. These
values show an excellent correlation with the theoretical model as expected for such
a simple model. These values become important in the coupled model as this beam
only model becomes the bounding condition for the system.
In-addition to verifying the frequency and buckling commands of ABAQUS, the
prestress ability was also investigated and verified. The prestress command was comTable 1: Verification of ABAQUS Beam Model
Frequency (Hz) Buckling Load (kN)
Calculated
5.4392
57.572
Numerical
5.4311
57.823
% error
0.149
0.436
17
6.0
Theoretical
5.0
Numerical
Analytical
Frequency (Hz)
4.0
3.0
2.0
1.0
0.0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Load Ratio, P/Pcr
Figure 10: Comparison and validation of ABAQUS approach
pared against the compressive axial load to ensure similar results were achieved. As
previously noted an increasing axial compressive force acting on a beam results in a
decreasing frequency. To compare the axial loading to the prestress loading a range of
loads from zero to the critical buckling load were analyzed. These values were further
compared against the approximate solution shown in Eq. 4 and the beam solution
derived by Shaker [9] in Eq. 8. Figure 10 shows how close each method is to the exact
solution presented by the Theoretical curve.
ABAQUS Support-Payload Model Setup
To increase the complexity of the model, the payload member was added as a
truss system with truss elements connected to the beam elements of the support at
the ends of the beam. Connecting the payload and support at the ends corresponds
to the N = 2 case for the number of ties. Figures 11 and 12 show the general setup
18
for the support-payload model. Figure 11 uses the previous notation for showing
the interaction between the support and payload where Fig. 12 further shows the
interaction between the payload and support as represented by the beam and truss
elements. With the inclusion of the payload, the compressive force previously acting
on the support by the axial load or prestress force was converted to a prestress tension
in the payload. This prestress value was calculated based on the load of interested
and the area of the payload.
To represent the payload as a string both truss elements and beam elements were
considered. Very similar results could be obtained by using a truss element incapable
of carrying a bending stiffness or using a beam element with a reduced bending
stiffness (EI). Ultimately the truss element was used but the same results could have
been obtained with the beam elements.
The payload was created using T2D2H truss elements with geometric properties
governing the area, elastic modulus, Poisson’s ratio, and density. The geometric
properties were defined with the *SOLID SECTION command. The area of both the
payload and support were set to the same value for the model to allow for simple
manipulation of the mass as suggested by Jones [16]. By adjusting the density of
both components the desired mass ratios could be obtained. Using different areas for
78
!*+,-*.(01231$
!
!
98
!
!
"566-$#(01231$
Figure78 11: General Representation of Support-Payload model for N=2
"#$%&'()!*+,-*./(01231$
98
41*2()"566-$#/(01231$
"566-$#(01231$
78
!*+,-*.(01231$
!
!
98
!
!
19
"566-$#(01231$
78
"#$%&'()!*+,-*./(01231$
98
41*2()"566-$#/(01231$
"566-$#(01231$
Figure 12: ABAQUS representation of the interaction between the payload and support for N=2
!*+,-*.(01231$
the components greatly increased the time to determine the component and system
masses.
The payload and support were joined with element ties at the desired location.
The nodes at the tie location were set using the *SURFACE, TYPE=NODE command
and tied together with the *TIE command.
Again using the *INITIAL CONDITIONS, TYPE=STRESS command to set the
prestress in the payload, the system frequency could be calculated. An initial step
was run to equalize the prestress and a second step was run to calculate the display
the first several natural frequencies. The ABAQUS code for the support-payload
model can be seen in Appendix A.
Payload Support Model for N greater than 2
The model used for the base N=2 configuration was easily modified for an increased number of ties. For N = 3, with an added connection point at the middle of
the beam, the ABAQUS model incorporates one more tie location. The remainder of
the input file is unchanged. The N=3 model can be seen for the general description in
Figure 13 and as modeled in ABAQUS in Fig. 14. As the number of ties is increased
20
the tie locations are set to ensure a symmetrical system. This helps to keep the
system simple and solvable.
Any model configuration can then be set by creating these ties at the necessary
locations. To create the flexural architecture system the nodes could be redfined to
encompass both the payload and the support and thus be tied at every locations. As
previously mention, the tie spacing needs to be set such that the slenderness ratio
between the tie points and the cross-section of the beam remains suitable.
78
!*+,-*.(01231$
!
!
98
78
!*+,-*.(01231$
!
!
"566-$#(01231$
!
!
98
Figure 13: The general support-payload model for N = 3
!
78
!
"#$%&'()!*+,-*./(01231$
"566-$#(01231$
98
78
41*2()"566-$#/(01231$
"#$%&'()!*+,-*./(01231$
98
41*2()"566-$#/(01231$
Figure 14: The representation of the ABAQUS support-payload model for N = 3
21
MATHEMATICAL MODEL
Model Development
Working with the model setup developed through the finite element model a mathematical approach was taken to define the analytical relationship between the payload
and support members. This approach looks at the known derivations and equations
of beam and string members and attempts to combine these members and create a
system equation that is representative of the model and compares to the numerical
results. As shown in Figs. 12 and 14, the model is treated as the interaction between
a beam and a string. This gives two independent equations coupled through the
boundary conditions of the payload.
Three approaches are taken to capture this interaction and attempt to produce a
useful method of determining the system frequency. The first approach simply solves
the coupled equations for the frequency of the system. The second approach uses a
transformation of coordinates to decouple the equations and solve them independently
before combining the equations to obtain a system equation for the frequency. The
last approach treats the system as an interaction between two beam members in an
attempt to further capture the contributions of the payload. Jones [16] presented the
ability to treat the system either as a beam-string system or a beam-beam system.
To treat the payload as a beam member a reduction of the bending stiffness relative
to the support bending stiffness must be used to minimize the flexural contribution
from the payload.
22
Coupled Beam-Sting Equations
The first approach to a system equations uses the coupled beam-string equations
to find the system frequency. The free-free boundary conditions of the system allow
for the beam equation of to be solved independent of the string equation. The solution
is then used in the coupled boundary conditions of the string to solve for a system
equation and frequency.
Support Equation
For the simple configuration shown in Fig. 12 the system is stiffened through the
tenison in the payload, this can be treated as a compressive force in the support.
Taking a differential element of the beam from Fig. 12 the governing equation as well
as the boundary conditions can be solved by summing the forces and moments. The
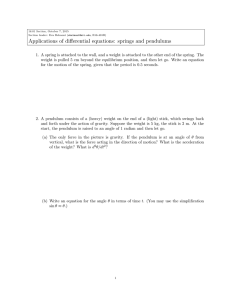
differential element under small rotation is shown in Fig. 15.
Figure 15: Forces and moments acting on a differential element of the beam
23
To begin the derivation summing forces, where Q is the shear force, M is the
bending moment, and dx is the differential length, and simplifying yields Eq. 12:
∂2z∗
−Q = 0
∂t2
∂2z∗
dQ
−
ρA
= 0
dx∗
∂t2
Q + dQ − ρAdx∗
(12)
Summing moments and simplifying yields Eq. 13:
M − M + dM − P dz ∗ − Qdx∗ = 0
dM
dz ∗
−P ∗ −Q = 0
dx∗
dx
(13)
Let w∗ be the displacement in the z∗ -direction, i.e., w∗ = 0 + z∗ = z∗ . Based on
standard definitions the moment can be defined as Eq. 14:
EI
d2 w∗
= −M
dx∗2
(14)
Combining Eq. 14 with Eq. 13 and solving for Q yields Eq. 15:
−
d
d2 w∗
dw∗
(EI
)
−
P
−Q = 0
dx∗
dx∗2
dx∗
d3 w∗
dw∗
−(EI ∗3 + P ∗ ) = Q
dx
dx
(15)
24
Equation 15 can by combined with Eq. 12 to create the equation of motion, where µs
is the support mass per unit length which gives Eq. 17:
∂
d3 w∗
dw∗
∂ 2 w∗
(−EI
−
P
)
−
µ
= 0
s
∂x∗
dx∗3
dx∗
∂t2
∂ 4 w∗
∂ 2 w∗
∂ 2 w∗
EI ∗4 + P ∗2 + µs 2 = 0
∂x
∂x
∂t
∂ 4 w∗
P ∂ 2 w∗
µs ∂ 2 w ∗
+
+
= 0
∂x∗4
EI ∂x∗2
EI ∂t2
(16)
(17)
Since w is a function of x∗ and t, the solution can be solved using separation of
variables. The time component can be assumed to hold the form in Eq. 18:
T (t) = sin(ωt)
(18)
where ω is the natural frequency of the system. Substituting Eq. 18 into Eq. 17
eliminates the time component and can rewritten as, Eq. 19:
d4 w∗
P d2 w∗
µs ∗
+
−
w =0
∗4
∗2
dx
EI dx
EI
(19)
and simplified to Eq. 20:
!!
ws∗iv + k ∗2 ws∗ − β ∗4 ws∗ = 0
(20)
where k and β are defined in Eq. 21:
k ∗2 =
P
(EI)s
β ∗4 =
µs ω 2
(EI)s
(21)
25
The problem can be non-dimensionalized by setting the following variables and
constants as Eq. 22:
x∗
L
x=
w=
w∗
L
k = k∗L
β = β ∗L
(22)
Equations 20 and 21 can then be written in the non-dimensional forms of Eqs. 23 and
24:
!!
k2 =
Boundary Conditions:
wsiv + k 2 ws − β 4 ws = 0
(23)
P L2
(EI)s
(24)
β4 =
µs ω 2 L 4
(EI)s
For the free-free state, the boundary conditions are de-
fined where the shear force and bending moment will be zero at the ends of the
beam. These conditions are defined in Eqs. 14 and 15 and can be rewritten in nondimensional terms as in Eqs 25 and 26:
(EI)s d2 w
L dx!2
"
(EI)s d3 w
2 dw
Q(x) = − 3
+k
L
dx3
dx
M (x) =
(25)
(26)
Setting these equal to zero for the free-free condition and simplifying gives the boundary condition equations as Eqs. 27 and 28:
d2 ws
2
dx
=0
x=0
$
d3 ws
dws
+ k2
3
dx
dx
d2 ws
2
dx
=0
(27)
x=1
%
x=0
=0
$
d3 ws
dws
+ k2
3
dx
dx
%
x=1
=0
(28)
26
Support Solution:
Then the assumed solution to the equation of motion for the
support, Eq. 23, as a function of x is given as Eq. 29:
ws (x) = A cosh(α1 x) + B sinh(α1 x) + D cos(α2 x) + E sin(α2 x)
(29)
where constants are defined as Eq. 30:
,
.1/2
α1 = − k 2 /2 + k 4 /4 + β 4
,
.1/2
α2 = k 2 /2 + k 4 /4 + β 4
(30)
The boundary conditions at x = 0 can be used to eliminate constants D and E in
Eq. 29 and gives Eqs. 31 and 32:
α12
α22
(31)
α13 + k 2 α1
α2
=B
3
2
α2 − k α2
α1
(32)
D=A
E=B
The solution for the support structure can now be reduced to Eq. 33
ws (x) = A{cosh(α1 x) +
α12
α2
cos(α2 x)} + B{sinh(α1 x) +
sin(α2 x)}
2
α2
α1
(33)
The solution for ws and the alpha term’s are expand and shown in Appedix B.
Payload Equation
Solving for the equation of the motion of the payload can be done in a similar fashion to that of the support. For tensioned stiffened architecture the payload member
contributes no bending stiffness and as noted is represented as a string.
27
Using the same method and giving the string a tension load which matches the
compressive load applied to the support. This gives the equation of motion for the
payload as Eq. 71:
P
∂ 2 wp∗
∂ 2 wp∗
+
µ
= 0
p
∂x2
∂t2
∂ 2 wp∗ µp ∂ 2 wp∗
+
= 0
∂x2
P ∂t2
(34)
(35)
Eliminating the time component by assuming that wp = wp (x) sin(ωp t) where ωp is
the natural frequency of the payload and simplifying gives Eq. 36:
!!
wp∗ −
ω2 ∗
w =0
a2 p
(36)
P
µp
(37)
where
a∗2 =
Then the non-dimensional payload equations become Eqs. 38
wp## − γ 2 wp = 0
γ2 =
Payload Boundary Conditions:
(38)
2
ω
a2
(39)
The payload is connected to the support struc-
ture at each end and therefore must have the same displacement. This gives the
boundary conditions for the payload given in Eq. 40 as:
ws (0) = wp (0)
ws (1) = wp (1)
(40)
28
Payload Solution
The assumed solution to the equation of motion for the payload(Eq. 36) is given
for the payload structure (Eq. 41) as:
wp (x) = F cos(γx) + G sin(γx)
(41)
where the constant γ is defined as:
γ ∗ = ω/a∗
(42)
The payload equations can be non-dimensionalized by setting the variables and constants as Eq. 43:
x∗
x=
L
System Coupling:
wp∗
wp =
L
a∗
a=
L
γ = γ∗
(43)
Now using the remaining boundary conditions for the sup-
port structure at x = 1 and the boundary conditions for the payload, 4 equations
with 4 unknowns can be written to couple the payload and support equations. These
4 equations can then be used to determine the characteristic equation of the system.
These equations are given in Eqs. 44 - 47:
C1 {α13 cosh(α1 ) − α13 cos(α2 )} + C2 {α13 sinh(α1 ) − α23 sin(α2 )} = 0
(44)
C1 {α23 sinh(α1 ) + α13 sin(α2 )} + C2 {α23 cosh(α1 ) − α23 cos(α2 )} = 0
!
"
α12
C1 1 + 2 − F = 0
α2
/
0
/
0
2
α1
α2
C1 cosh α1 + 2 cos(α2 ) + C2 sinh(α1 ) +
sin(α2 )
α2
α1
(45)
−F cos(γ) − G sin(γ) = 0
(46)
(47)
29
Isolating the coefficient matrix gives:
α13 cosh(α1 ) − α13 cos(α2 ) α13 sinh(α1 ) − α23 sin(α2 )
0
0
3
3
3
3
α sinh(α1 ) + α sin(α2 ) α cosh(α1 ) − α cos(α2 )
0
0
1
2
2
2
2
α1
1
+
0
−1
0
α22
2
α
cosh α1 + α12 cos(α2 )
sinh(α1 ) + αα21 sin(α2 )
− cos(γ) − sin(γ)
(48)
2
The determinant of the coefficients yields Eq. 49:
' 3
(α1 sinh α1 − α23 sin α2 )(α23 sinh α1 + α13 sin α2 )(− sin γ)
(
− (α13 cosh α1 − α13 cos α2 )(α23 cosh α1 − α23 cos α2 )(− sin γ) = 0. (49)
System Solution
The equilibrium equation can be simplified to:
(
'
sin γ 2α13 α23 (1 − cos α2 cosh α1 ) − (α16 − α26 ) sin α2 sinh α1 = 0,
(50)
or more conveniently:
'
(
sin γ 2β 6 (1 − cos α2 cosh α1 ) + k 2 (k 4 + 3β 4 ) sin α2 sinh α1 = 0.
(51)
It should be noted that Eq. 51 is the characteristic equation of a beam with a compressive axial load with the sin γ term out front.
30
Decoupled Boundary Conditions
The second approach to developing an analytical solution for the one-dimensional
architectures is to decouple the boundary conditions between the payload and the
support. The coupled payload and support equations as previously derived are shown
in Eq. 23 for the support and Eq. 38 for the payload.
!!
wsiv + k 2 ws − β 4 ws = 0
(23)
wp## − γ 2 wp = 0
(38)
These equations are coupled through the payload boundary conditions given in Eq. 75
and can be decoupled by transforming the coordinates as Eq. 52:
z = wp − ws .
(52)
Then the boundary conditions for the payload become Eq. 53:
z(0) = 0
z(1) = 0
(53)
Inserting Eq. 52 into Eq. 38 allows this decoupled boundary condition to be used,
Eq. 54:
d2 (z + ws )
− γ 2 (z + ws ) = 0
2
dx
! 2
"
d2 z
d ws
2
2
−γ z = −
− γ ws
dx2
dx2
(54)
31
The solution for ws can be solved from the independent boundary conditions then
inserted into Eq. 54 where a solution can be found for z. As solved the solutions for
ws can be written as Eq. 55:
ws (x) = C1 sinh(α1 x) + C2 cosh(α1 x) + C3 sin(α2 x) + C4 cos(α2 x)
(55)
where the constants have solved for as Eqs. 56:
C1 = 1
C3 =
α2
α1
α23 (cos(α2 ) − cosh(α1 ))
α23 sinh(α1 ) + α13 sin(α2 )
α12 α2 (cos(α2 ) − cosh(α1 ))
C4 = 3
α2 sinh(α1 ) + α13 sin(α2 )
C2 =
(56)
The value for C1 is set at 1 for approximation purposes. This value would have
to be found experimentally to determine the amplitude of the system for a given
forcing function. The mode shape produced can be seen to accurately approximate
the free-free beam.
With the known solution for ws , Eq. 54 becomes a non-homogenous ordinary
differential equation and can be solved through the combination of a homogenous
and particular solutions. To solve the homogenous equation the right hand side of
Eq. 54 becomes zero, Eq. 57:
d2 zh
− γ 2 zh = 0
dx2
(57)
This simple ordinary differential equation has a solution given in Eq. 58:
zh (x) = Aeγx + Be−γx
(58)
32
Solving the particular solution can be found by expanding Eq. 55 and using the
method of undetermined coefficients, where the particular component of the solution
can be solved from Eq. 59:
d2 zp
− γ 2 zp = Φ(x)
2
dx
(59)
The non-homogenous component can be simplified to Eq. 60 from the support solution.
α1 x
Φ(x) = −e
(1 + C2 ) ·
!
α12 − γ 2
2
"
α1 x
−e
(−1 + C2 ) ·
!
α12 − γ 2
2
"
+ C3 (α22 − γ 2 ) sin(α2 x) + C4 (α22 − γ 2 ) cos(α2 x) (60)
Setting up the solution, the particular component can be set as Eq. 61:
zp = Deα1 x + Ee−αx + F sin(α2 x) + G cos(α2 x)
(61)
And the constants can be solved for as Eqs. 62 - 65:
1 + C2
2
1 − C2
E =
2
α2 − γ 2
F = −C3 22
= C3
α2 + γ 2
α2 − γ 2
G = −C4 22
= C4
α2 + γ 2
D = −
(62)
(63)
(64)
(65)
(66)
33
Further simplifying and converting back to the original form gives the solution for
the particular solution as Eq. 67:
zp (x) = − sinh(α1 x) − C2 cosh(α1 x) + C3 sin(α2 x) + C4 cos(α2 x)
(67)
Then combining with the homogenous solution the equation for z becomes Eq. 68:
z( x) = Aeγx + Be−γx − sinh(α1 x) − C2 cosh(α1 x) + C3 sin(α2 x) + C4 cos(α2 x) (68)
Although this solution doesn’t solve for a system frequency, the individual frequencies found through this method offer insight into the behavior of the ABAQUS
model.
Beam-Beam Equation Derivation
In addition to treating the payload as a string element, it might be possible to
treat both payload and support as beams to ensure that both material properties are
accounted for. Similar to ABAQUS you could treat the payload beam at much reduced material properties to negate the bending stiffness. This approach was verified
as an appropriate assumption through numerical models.
Beam-Beam Support Derivation
The support could be treated with the same boundary conditions and compressive
loading giving the same equations for the beam Eq. 23 and the boundary conditions
Eqs. 27 and 28:
wsiv + k 2 ws## − β 4 ws = 0
(23)
34
d2 ws
2
dx
=0
x=0
$
dws
d3 ws
+ k2
3
dx
dx
And a solution of Eq. 33:
d2 ws
2
dx
=0
(27)
x=1
%
=0
x=0
ws (x) = A{cosh(α1 x) +
$
dws
d3 ws
+ k2
3
dx
dx
%
=0
(28)
x=1
α12
α2
cos(α2 x)} + B{sinh(α1 x) +
sin(α2 x)}
2
α2
α1
(33)
From the support boundary conditions 2 equations can be obtained with 2 unknowns,
Eqs. 69 and 70:
C1 {α13 cosh(α1 ) − α13 cos(α2 )} + C2 {α13 sinh(α1 ) − α23 sin(α2 )} = 0
(69)
C1 {α23 sinh(α1 ) + α13 sin(α2 )} + C2 {α23 cosh(α1 ) − α23 cos(α2 )} = 0
(70)
Beam-Beam Payload Derivation
The payload could be resolved using the tension to obtain a governing equation
of Eq. 71:
wpiv − p2 wp## − η 4 wp = 0
(71)
where the constants are defined as:
p2 =
P L2
(EI)p
η4 =
µp ω 2 L 4
(EI)p
(72)
Solving for the displacements yields Eq. 73:
wp (x) = C5 cosh(α3 x) + C6 sinh(α3 x) + C7 cos(α4 x) + C8 sin(α4 x)
(73)
35
where the non-dimensional terms α3 and α4 are given as Eq. 74:
,
.1/2
α3 = p2 /2 + p4 /4 + η 4
,
.1/2
α4 = − p2 /2 + p4 /4 + η 4
(74)
The boundary conditions for the displacement would be the same as for a string,
Eq. 75:
ws (0) = wp (0)
ws (1) = wp (1)
(75)
As the payload has become a fourth order differential element, two more boundary
conditions are necessary to eliminate the two new constants, the moment at the ends
can be treated as zero, Eq. 76:
d2 wp
dx2
x=0
=0
d2 wp
dx2
=0
(76)
x=1
The constants could be determined and the determinant of the coefficient matrix could
again be used to find the characteristic equation. This equation would have material
property components for both payload and support which is what the equation has
been missing. Initial work on this front gives constants as Eq. 77 and 78:
α12
α22
(
'
1
2
2
2
=
C
(α
cosh
α
−
α
cos
α
)
+
C
α
sinh
α
3
5
3
2
6
3
3
3
α42 sin α4
C7 = C5
(77)
C8
(78)
36
so the equation for wp (x) can be written as Eq. 79:
7
1
α2 cosh α3 − α32 cos α2
wp (x) = 2 C5 (α42 cosh α3 x + α32 cos α4 x + 3
sin α4 )
α4
sin α4
8
α32 sinh α3
+ C6 (sinh α3 x + 2
sin α4 x) (79)
α4 sin α4
Now applying the boundary conditions to establish the displacement at each end, at
x = 0, Eq. 80 gives :
C1 (1 +
α12
α32
)
−
C
(1
+
)=0
5
α22
α42
(80)
and for x = 1, Eq. 81 gives:
C1 (cosh α1 +
α12
α2
cos α2 ) + C2 (sinh α1 +
sin α2 )
2
α2
α1
1
1
− C5 2 (α32 + α42 ) cosh α3 + C6 2 (α32 + α42 ) sinh α3 = 0. (81)
α4
α4
Taking the determinant of the coefficient matrix of Eqs. 69, 70, 80, and 81 yields
Eq. 82:
$
7 !
"8
' 3
( ' 3
(
α32
3
3
α1 cosh α1 − α1 cos α2 · α2 cosh α1 − α2 cos α2 · − 1 + 2
α4
%
$
7
8
.
' 3
(
1 , 2
2
· − 2 α3 + α4 sinh α3
−
α1 sinh α1 − α23 sin α2 · [α23 sinh α1
α4
7 !
"8 7
8%
2
,
.
α
1
+ α13 sin α2 ] · − 1 + 32
· − 2 α32 + α42 sinh α3
= 0. (82)
α4
α4
37
Which can be simplified to Eq. 83:
' 6
(
2β (1 − cos α2 cosh α1 ) + (α26 − α16 ) sin α2 sinh α1
7
8 7 2
8
α32
α3 + α42
· 1+ 2 ·
sinh α3 = 0 (83)
α4
α42
Comparing Equations 51 and 83 it can be seem that the first portion of Eq. 83 is
identical to 51 and adds a second section to the equation that is just a function of
the payload properties.
38
RESULTS
Numerical Results
As shown by Jones et al. [16] the mass ratios show a nice form when ranged
from zero to the critical buckling load, Figure 16. A heavy dependence can be seen
from the variation of the mass ratio. At low mass ratios (MR < 0.01) the system
frequency behaves similar to a beam in compression where at high mass ratios (MR
> 100) the system frequency resembles a string in tension. Of interest here is the
practical mass ratios that a spacecraft could take, focusing on a range of payload
dominated structures, Fig. 17 shows the change in frequency of system for the mass
ratios between 1:1 and 1:100. As the mass ratio is increased, its effect on the system
frequency is greatly diminished. As noted in the results the effect of mass ratio is an
a inverse relationship to the frequency. The change in system frequency between 1:30
and 1:100 is slightly more than the change from 1:20 to 1:30.
Analytical Results
Having developed the characteristic equation for this system, Equation 50 can be
plotted for set material properties to determine the values of ω where the equation
will be equal to zero. Solving for the natural frequency should yield a value similar
to those determined through numerical analysis.
Using the properties shown in Table 2, the characteristic equation, Eq. 51, for the
beam-string model can be solved for the the values of ω that make the equation go
to zero. A Mathematica program was generated to solve the characteristic equation
a given set of load ratios. This process is shown in Appendix C and uses a built-in
Freq
0.30
0.20
0.10
0.00
0.00
0.20
0.40
0.60
Load39
Ratio, P/Pcr
1.00
ms:mp = 100:1
1.00
ms:mp = 1:100
0.90
Frequency Ratio, f/fsupport
0.80
0.80
0.70
0.60
0.50
0.40
0.30
ms:mp = 1:1
0.20
0.10
0.00
0.00
0.20
0.40
0.60
Load Ratio, P/Pcr
0.80
1.00
Figure 16: Comparison of system frequency based on a full range of load and mass
ratios
!"#!$ %&1:100
1.00
!"#!$ %&1:30
ms:mp %&'#)(
Frequency Ratio, f/fsupport
0.90
0.80
ms:mp %&'#'(
0.70
0.60
0.50
!"#!$ %&1:1
0.40
0.30
0.20
0.10
0.00
0.00
0.20
0.40
0.60
Load Ratio, P/Pcr
0.80
1.00
Figure 17: Comparison of system frequency for mass ratios of interest
1.00
tio, f/fsupport
0.90
0.80
0.70
0.60
ms:mp = 100:1
ms:mp = 1:100
40
root finding function to establish the frequency values and are then stored with the
corresponding load ratio.
A sample curve can be seen in Fig.18a where the characteristic equation is graphed
as a function of the frequency. For the properties listed in Table 2 and a load ratio
of 0.3, the curve gives a value of 67.3013 radians/second, or a frequency of 10.7128
Hertz. Running this process for the full range of load ratios, Fig. 18b, shows the
peak frequency around 80 and deceasing as the load ratio as increased. As noted in
Chapter 4 the equation derived for the beam-string model, Eq. 51, was very similar
to the beam equation with a compressive load. Figure 19 shows the frequency as a
function of load ratio and confirms that the equation is behaving as the compressively
loaded beam.
As a result of the compressive nature of beam-string model, the model was resolved
as a beam-beam model further incorporate the material properties of the payload
member. Determined through the same methods as the beam-string model, Figure 20a shows a frequency value for a load ratio of 0.7. A distinct changes occurs
in the beam-beam model when compared to the beam-string model. In the beamstring model the first zero crossing is at zero whereas the beam-beam model has no
crossing at zero and can be seen to approach infinity at zero. Both of these curves
do however, have the same frequency at the first non-zero crossing and produce the
same frequency values over the range of load ratios from zero to one, Fig. 20b. Do
Table 2: Member specific material properties and general system properties
Payload Support
Density (kg/m )
4545.45 454.55
2
Area (m )
0.01
0.01
Mass/Length (kg/m) 45.4545 4.5455
Elastic Modulus
7x108
7x1010
3
Length (m)
Prestress (N)
k
β4
General Props
10
41740
2.6284
0.0779ω 2
41
250 000
250 000
200 000
200 000
150 000
150 000
100 000
100 000
50 000
50 000
0
20
40
60
80
100
0
(a) Frequency isolation of single characteristic
equation
20
40
60
80
100
(b) Frequency values for the full range of load
ratios
Figure 18: Sample curve of the characteristic equation to determine zero crossings for
the beam-string model
12
Frequency Ratio
10
8
6
4
2
0
0.0
0.2
0.4
0.6
0.8
1.0
Load Ratio
Figure 19: Frequency values of the beam-string model over range of load ratios
42
100 000
1. ! 108
80 000
8. ! 107
60 000
6. ! 107
40 000
4. ! 107
20 000
2. ! 107
0
20
40
60
80
100
(a) Frequency isolation of single characteristic
equation
0
20
40
60
80
100
(b) Frequency values for the full range of load
ratios
Figure 20: Sample curve of the characteristic equation to determine zero crossings for
the beam-beam model
12
Frequency Ratio
10
8
6
4
2
0.0
0.2
0.4
0.6
0.8
1.0
Load Ratio
Figure 21: Frequency values of the beam-beam model over range of load ratios
to the scale of the Fig. 20b the non-zero crossings do not appear but are present for
each curve and can be seen by changing the bounds of the graph. As the load ratio
approaches the critical load the frequency approaches zero even though there is no
zero crossing present in the curve.
43
Numerical vs Analytical
Further comparison was made between the numerical and analytical results. As
previously observed, the numerical solution varies depending on the mass ratio(MR)
(Fig. 16). For low mass ratios (ms : mp = 100 : 1, or MR = 100) the peak frequency
occurs at lower values of the load ratio before being driven to zero. At MR = 1 the
frequency is symmetic about the load ratio and peaks at a load ratio of 0.5. And
as the mass ratio of the payload is increased and it becomes the dominant member,
the frequency is maximized at higher load ratios before returning to zero just before
the critical load ratio. As noted in the analytical derivation the resulting solution
was very similar to the characteristic equation for a beam with a compressive axial
load. A beam with a compressive load will achieve its peak frequency at when no
load is applied, the increasing compressive force will stiffen the beam and drive the
frequency to zero.
Figures 22 - 25 show the comparison between the numerical ABAQUS results
and the analytical results produced through the mathematical model. All of the
mathematical solutions behave as the beam with a compressive load and are unaffected by the mass ratio, however the support dominated cases (MR ≥100) show a
close correlation with the numerical model. As the payload mass is increased the
correlation is quickly diminished as the payload is inadequately represented in the
coupled characteristic equation. Further
Expanded Numerical Results
With the divergence of frequencies between the numerical and analytical models,
the numerical results were expanded to gain insight into what shaped the analytical
model. The system seems to take on the properties of the reference beam used to
Frequency
(Hz)
Frequency
(Hz)
44
5.0
5.0
4.0
4.0
3.0
3.0
2.0
2.0
1.0
1.0
0.0
0.00.00
0.00
Numerical
Numerical
Analytical
Analytical
0.20
0.20
0.40
0.60
Load Ratio (P/Pcr)
0.40
0.60
Load Ratio (P/Pcr)
0.80
0.80
1.00
1.00
Frequency
(Hz)
Frequency
(Hz)
Figure 22: Results for Mass Ratio of 100:1
5.0
5.0
4.0
4.0
3.0
3.0
2.0
2.0
1.0
1.0
0.0
0.0 0
0
Numerical
Numerical
Analytical
Analytical
0.2
0.2
0.4
0.6
Load
0.4 Ratio (P/Pcr)
0.6
Load Ratio (P/Pcr)
0.8
0.8
1
1
Figure 23: Results for Mass Ratio of 10:1
6.0
Numerical
Analytical
Frequency (Hz)
5.0
4.0
3.0
2.0
1.0
0.0
0.00
14.0
0.20
0.40
0.60
Load Ratio (P/Pcr)
1.00
Figure 24: Results for Mass Ratio of 1:1
Numerical
12.0
Frequency (Hz)
0.80
Analytical
10.0
8.0
6.0
4.0
2.0
0.0
0.00
0.20
0.40
0.60
0.80
1.00
Frequency (Hz)
Analytical
4.0
3.0
2.0
1.0
0.0
0.00
0.20
0.40
0.60
Load Ratio (P/Pcr)
45
0.80
1.00
14.0
Numerical
Frequency (Hz)
12.0
Analytical
10.0
8.0
6.0
4.0
2.0
0.0
0.00
0.20
0.40
0.60
Load Ratio (P/Pcr)
0.80
1.00
Figure 25: Results for Mass Ratio of 1:10
non-dimensionalize the curve. This reference beam, which is made of the support
bending stiffness, support moment of inertia, and the system total mass and length,
is used to find the frequency for free-free boundary conditions without the presence
of an axial load. As the mass ratios are changed, the system frequency never goes
above the reference frequency even though at higher mass ratios (MR > 10:1) the
support frequency would go much higher above this reference frequency.
To observe this interaction between the payload and support, the changes in mode
shapes can be seen as the load ratio is increased. Figure 26 shows how the mode shape
changes as the payload tension is increased for a mass ratio of 1:20 (ms :mp ). At small
loads the payload dominates the mode shape; as the load increases, the support
structure becomes more prevalent before showing a symmetric mode shape.
The symmetric mode shape occurs for all mass ratios at the peak frequency. After
the peak frequency has been achieved, the payload contribution starts to decrease
before being minimized and returning to a zero frequency corresponding to the critical
buckling load of the support structure. This range of mode shapes is valid for all mass
ratios with the load ratios changing for the given mass ratio.
This change in mode shape, through the changing load ratio, shows a distinct
interaction between both the payload and the support. This interaction was isolated
46
,$(+-.(&/$
010
015
012
0156
013
017
014
210
!"##$%&
'()*$(+
Figure 26: Changes in system mode shape as the payload tension is increased for a
mass ratio of 1:20.
by decoupling the members and plotting the individual frequencies of the payload
and the support. Figure 27a shows the frequency relationship between the payload
contribution and the support contribution of the frequency. The system frequency
follows the payload frequency up until it encounters the support frequency driving
the frequency down at which point the system frequency takes on the curve of the
support member. In this case the frequency of the system is bounded by the individual
frequencies of the members.
As the mass ratio is decreased the amount the individual members bound the
system changes. For a mass ratio of 10:1, Fig. 27b, the system frequency still follows
the payload frequency up but doesn’t follow the support frequency down as closely
as before. This change is further seen for the mass ratio of 1:1, now the system
frequency follows the same trend as the payload frequency but at a higher value and
47
follows further up the curve, Fig 27c. The system frequency doesn’t match the support
frequency until very high load ratios. The system is no longer bounded by the payload
frequency but only that of the support. As the support mass is further decreased the
frequency becomes very large and would be tough for the system frequency to surpass.
The payload dominated mass ratios (1:10 in Fig. 27d and 1:100 in Fig. 27e) continue
this change. Ultimately, both the payload and the support are driving forces in the
frequency of the system but is only truly bound by the support dominated cases.
System Relationships
While running a variety of numerical cases to attempt to gain insight into the properties that would affect the analytical solution, several distinct trends were noticed.
Changes were made to length, EI, mass ratios, and number of ties in small isolated
steps. When graphed as a function of total system mass, each variable followed a
similar curve that appeared to be changing at a constant rate between a single variable. The non-dimensional graphing, used in Fig. 16, was eliminated as changes made
to the model could not be observed. Since the frequency was non-dimensionalized
with the support only natural frequency, these changes also had to be accounted for
in the support only calculation, which provided insight to the characteristics of the
governing equations. These trends are shown for changes in length, Fig. 28a, bending
stiffness, Fig. 28b, and mass ratios, Fig. 28c. Looking at the changing length, for a
given total mass the amount the frequency changes by, for differing lengths, is related
to the ratio between the modified and original lengths.
The trends between the changes in variables are shown in Eqs. 84a - 84c where
subscript 1 refers to the initial configuration and subscript 2 is the modified configuration. These relationships are valid for all mass ratios and number of ties, as found
numerically through finite element models. It can also be shown that if two variables
Payload
Support
ABAQUS
(a)
0.2
64
53
Payload
Support
ABAQUS
0.8
1
0
0.8
1
ABAQUS
0.2
Support
ABAQUS
6
31
20
0
0.2
1
0
45
0
40
35
30
45
25
40
20
35
15
30
10
25
205
150
10 0
0.2
4
0.4
0.6
Load Ratio, P/Pcr
3
0.8
2
0.4
0.6
1
Load Ratio, P/Pcr
0.8
0
0.2
0.2
1
ABAQUS
0.2
Payload
Support
0.2 ABAQUS
0.4
0.6
Load Ratio, P/Pcr
0.8
1
0.4
0.8
1
0.8
84
62
Payload
Support
0.2
ABAQUS
Payload
Support
ABAQUS
Payload
Support
ABAQUS
Payload
Support
40
2 0
0
1
0.6
1
ABAQUS
0.2
0.4
0.6
Load Ratio, P/Pcr
0.8
1
0.2
0.4
0.6
Load Ratio, P/Pcr
0.8
1
0
(c) Mass Ratio 1:10
5
0
0
Frequency, Hz
5
ABAQUS
Payload
Support
Load Ratio,
P/Pcr
(b) Mass
Ratio
10:1
12
14
10
0.4
0.6
128
Load Ratio, P/Pcr
106
Support
Payload
Support
14
Payload
Payload
42
5
6
4
5
3
4
2
3
1
2
0
1 0
0
Frequency,
Hz
Frequency,
Hz
0.2
20
18
16
14
0.4
0.6
12
Load Ratio, P/Pcr
10
8
6
Mass
100:1
0.4 Ratio 0.6
4
Load Ratio, P/Pcr
2
0
0
Frequency,
Hz
Frequency,
Hz
6
Frequency, Hz
20
18
16
14
20
12
18
10
16
8
14
6
12
4
10
2
8
0
6
0
4
2
06
0
5
0.4
0.6
Load Ratio, P/Pcr
0.8
(d) Mass
Ratio 1:10
1
Payload
Support
ABAQUS
45
40
35
30
0.4
0.6
25
Load Ratio, P/Pcr
20
15
0.4
0.610
Load Ratio, P/Pcr
5
0
Frequency, Hz
Frequency,
Hz
Frequency,
Hz
Frequency,
Hz
Frequency,
Hz
Frequency,
Hz
Frequency,
Hz
48
0
0.8
1
0.8
1
0.2
0.4
0.6
Load Ratio, P/Pcr
Payload
Support
ABAQUS
0.8
1
(e) Mass Ratio 1:100
Figure 27: Comparison of individual member frequencies to system frequency
49
10.0
L = 10m
20m
LL == 10m
L
=
30m
L = 20m
40m
LL == 30m
L = 40m
10.0
8.0
Frequency
(Hz)(Hz)
Frequency
8.0
6.0
6.0
4.0
4.0
2.0
2.0
0.0
0.0 0
0
200
200
400
600
(kg)
400Total Mass600
Total Mass (kg)
800
1000
800
1000
(a) Length Variations
30.0
EI*10
EI*5
EI*10
EI*2
EI*5
EI
EI*2
30.0
25.0
Frequency
(Hz)(Hz)
Frequency
25.0
20.0
EI
20.0
15.0
15.0
10.0
10.0
5.0
5.0
0.0
0.0 0
0
200
400
600
(kg)
400Total Mass 600
Total Mass (kg)
200
800
1000
800
1000
(b) Stiffness Variations
10.0
ms:mp = 1:100
ms:mp = 1:20
ms:mp = 1:10
ms:mp = 1:1
9.0
Frequency (Hz)
8.0
7.0
6.0
5.0
4.0
3.0
2.0
1.0
0.0
0
200
400
600
800
1000
Total Mass (kg)
(c) Mass Ratio Variations
12.0
Figure
28: Effects of changes in system
variables
ms:mp
= 1:100
requency (Hz)
10.0
8.0
6.0
4.0
ms:mp = 1:10
ms:mp = 1:1
50
are changed then the result can be found by multiplying the necessary variation of
the equations in Eq. 84. While Eq. 51 shows the initial work towards an analytical
solution for the system will provide a nonlinear solution, these relationships could
provide a quick method to see how small changes to a system property would effect
the system frequency and could be tested when appropriate.
f2
≈
f1
#
L31
(a)
L32
f2
≈
f1
#
(EI)2
(b)
(EI)1
f2
≈
f1
9
M1
(c)
M2
(84)
In looking at these relationships it is noted that each variable defined is a system
variable; length, bending stiffness, and total mass. The bending stiffness is driven
by the stiffness defined for the support and drives the properties of the system. Regardless of the specified mass ratio, the support only frequency without the presence
of the payload is the maximum value that the system frequency will take. This
bounding occurs even as the properties are modified and the individual support or
payload frequency occurs above this value. By including this stiffness value these
relationships solved in any form, holding the frequency constant and adjusting the
length and total to reach an optimal design. When holding the mass ratio constant,
these relationships in Eqs. 84 can be written as
f≈
9
(EI)
.
M L3
(85)
This could then be solved for any variable and be used to approximate the changes
between the properties of interest. Figure 29 shows that for several fixed frequencies
the length can be changed as a function of total mass. From this work it can be
seen that a close approximation can be found for a fixed mass ratio and load ratio to
51
!#
!"
$%&'(&)*+,$%&'(&)*+,.
!"#$%&'()
.#
$%&'(&)*+,!
."
-#
-"
#
"
"
.""
/""
0""
1""
-"""
*+%,-(.,//'(0$
Figure 29: Variation of length as the total mass is increased at a fixed frequency
(f1 > f2 > f3 )
investigate the changes to the system properties, Eq. 86:
λ2
f≈
2π
9
(EI)
(1 + Lr ),
M L3
(86)
where λa is a constant based on the numerical data and Lr is the fixed load ratio.
It has been found for this beam-string model, λ2 is 4.73 · π. Figure 30 shows how
closely this approximation resembles the original data. The value of λ can be seen as
a combination of the individual properties of the payload and the support. A free-free
beam has a value of 4.73 and a pinned-pinned string has a value of π. Individually
these each have a squared λ value but in combining them it can be treated as
λ2 = λp · λs
(87)
52
10.00
ABAQUS L = 10m
ABAQUS L = 20m
8.00
ABAQUS L = 30m
Frequency (Hz)
Eq. 87 L = 10m
Eq. 87 L = 20m
Eq. 87 L = 10m
6.00
4.00
2.00
0.00
0
200
400
600
800
1000
Total Mass (kg)
Figure 30: Comparison of numerical data with approximate equation
In additional to how the geometric properties affected the system, the effect from
the number of ties was interesting. Running numerical models to track the changes
from the number of ties used in the system showed less impact than initially thought.
Figure 31 shows the variations of frequency for several values of total mass and the
effect of number of ties on each system. It shows the frequency peaks for N = 3 and
then slowly decrease for higher values of N. With minimal effect above N = 3 the
system can be design for practicality rather than optimal frequency. The number of
ties further shows a converging trend in the location of peak frequency. For N = 2,
Fig. 32 shows a wide range of peak frequencies for the various mass ratios but as
N is increased this is minimized. Additionally, as the number of ties is increased,
the effective length is reduced, which increases the stiffness of the support and leads
to the shift in the frequency curve towards that seen in Fig. 17 for the mass ratio
of 100:1. Figure 33 shows this effect for different mass ratios and again shows the
frequencies converging regardless of the mass ratios.
53
8
Frequency, Hz
7
6
5
100kg
300kg
500kg
1000kg
4
3
2
1
0
2
3
4
5
Number of Ties, N
6
Figure 31: Variation of frequency as the number of ties is increased
Fr
3.0
2.0
1.0
0.0
0
200
400
600
800
1000
Total Mass (kg)
54
12.0
ms:mp = 1:100
ms:mp = 1:10
ms:mp = 1:1
Frequency (Hz)
10.0
8.0
6.0
4.0
2.0
0.0
0
200
400
600
800
1000
Total Mass (kg)
(a) N = 2
12.0
12.0
ms:mp = 1:1
ms:mp = 1:1
ms:mp = 1:10
ms:mp = 1:10
ms:mp = 1:100
ms:mp = 1:100
Frequency(Hz)
(Hz)
Frequency
10.0
10.0
8.0
8.0
6.0
6.0
4.0
4.0
2.0
2.0
0.0
0.0
0
0
200
200
400
600
400
600
Total Mass (kg)
Total Mass (kg)
800
800
1000
1000
(b) N = 3
14.0
14.0
ms:mp = 1:1
ms:mp = 1:1
ms:mp = 1:10
ms:mp = 1:10
ms:mp = 1:100
ms:mp = 1:100
Frequency(Hz)
(Hz)
Frequency
12.0
12.0
10.0
10.0
8.0
8.0
6.0
6.0
4.0
4.0
2.0
2.0
0.0
0.0
0
0
200
200
400
600
400
600
Total Mass (kg)
Total Mass (kg)
800
800
1000
1000
(c) N = 4
Figure 32: Converging frequency curves for several mass ratios as the number of ties
is increased
Frequency(Hz)
(Hz)
Frequency
55
5.0
5.0
4.5
4.5
4.0
4.0
3.5
3.5
3.0
3.0
2.5
2.5
2.0
2.0
1.5
1.5
1.0
1.0
0.5
0.5
0.0
0.0
0.00
0.00
ms:mp = 1:100
ms:mp = 1:100
ms:mp = 1:10
ms:mp = 1:10
ms:mp = 1:1
ms:mp = 1:1
0.20
0.20
0.40
0.60
0.40
0.60
Total Mass (kg)
Total Mass (kg)
0.80
0.80
1.00
1.00
(a) N = 2
9.0
9.0
ms:mp = 1:1
ms:mp = 1:1
Frequency(Hz)
(Hz)
Frequency
8.0
8.0
ms:mp = 1:10
ms:mp = 1:10
ms:mp = 1:100
ms:mp = 1:100
7.0
7.0
6.0
6.0
5.0
5.0
4.0
4.0
3.0
3.0
2.0
2.0
1.0
1.0
0.0
0.0
0
0
0.2
0.2
0.4
0.6
0.4
0.6
Total Mass (kg)
Total Mass (kg)
0.8
0.8
1
1
(b) N = 3
ms:mp = 1:1
9.0
8.0
ms:mp = 1:10
ms:mp = 1:100
Frequency (Hz)
7.0
6.0
5.0
4.0
3.0
2.0
1.0
0.0
0
0.2
0.4
0.6
0.8
1
Total Mass (kg)
(c) N = 4
requency (Hz)
Figure 33: Effect
4.5 of number of ties on frequency for a range of load ratios
4.0
Numerical
3.5
Analytical
3.0
2.5
2.0
56
CONCLUSION
The focus of this work was to investigate the governing relationships of a general
one-dimensional spacecraft payload and coupled support structure. A finite element
model was generated to represent a generic one-dimensional spacecraft structure.
Using a generic model allows for simple modifications to the model to represent a
large array of different designs. The model was then used to observe changes to
the system natural frequency as a result of variations on structural characteristics
such as length, mass ratio, bending stiffness, tension, and number of connecting
ties. Through these observations several relationships were established that can help
determine the trade-offs between the system variables while maintaining a desired or
optimal parameter, such as frequency or total mass.
One set of relationships were established by comparing a baseline model to a
modified model and looking at the change between the frequencies. Using the ratios between the frequencies, the driving force for the change in frequency could be
isolated. Equation 84 shows how changes to individual system variables effect the
fundamental natural frequency (f ) of the system for the case with two ties between
the payload and support.
f2
≈
f1
#
L31
(a)
L32
f2
≈
f1
#
(EI)2
(b)
(EI)1
f2
≈
f1
9
M1
(c)
M2
(84)
These relationships are defined through system variables: length, L, total mass, M,
and support bending stiffness, EI, and can be used individually or in any combination
simply by multiplying the individual ratios together. Further the frequency ratio can
be set to 1 and then a tradeoff between the system variables can be used to optimize the system for the fixed frequency. Further investigation gave an approximate
57
equation for a fixed mass ratio and load ratio. Equation 86 uses a combined value
for the frequency parameter and the system variables to accurately match the curves
generated by the finite element model.
λ2
f≈ a
2π
9
(EI)
(1 + Lr ),
M L3
(86)
Initial work was conducted for an increased number of ties in the system. The
relationships shown in Eq. 84 remain valid as the number of ties is increased. As the
number of ties is further increased the system frequency starts to converge on single
frequency curve regardless of mass ratio. As the length increases the number of ties
will increase before convergence is seen in the system.
These numerical results were then compared to those of several derived mathematical models to determine if a closed-form solution could be used to predict system
behavior over the same range of structural characteristics. The mathematical models
were developed using a beam-string model and a beam-beam model with coupled
boundary conditions and a beam-string model with decoupled boundary conditions.
The models with the coupled boundary conditions proved to correlate well to analytical predictions only for the case of low mass ratios where the support structure
dominates total system mass, and thus the structural system performs like a beam
under compression.
The model with the decoupled boundary condition generated individual frequencies for the payload and support and thus didn’t provide the system frequency that
is to be developed, but did show how the payload and support contribute to the
system frequency. At low mass ratios, the system frequency is perfectly bound by the
individual frequencies of the payload and support. As the load ratio is increased, the
system frequency matches the payload frequency, up to the point where the support
58
frequency intersects the payload frequency, then the system frequency matches the
support frequency down to zero at the critical load ratio. As the mass ratio is increased the system frequency follows a similar trend but doesn’t match the individual
frequencies over the load ratio range. Further as the payload becomes the dominant
member, the system frequency exceeds the payload frequency but remains bounded
by the support frequency
The work herein has not only yielded a greater understanding of interactions between one-dimensional payloads and support structures, but it has begun to lay the
groundwork for further study into closed form solutions that will provide valuable
insight into the behavior of large one-dimensional and two-dimensional spacecraft
structures. These insights promise to aid mission designers in objectively evaluating new structural architectures based on structural performance rather than on an
unbalanced adherence to heritage or in some cases personal preference.
59
REFERENCES CITED
60
[1] Canadian Space Agency. Solar array wing panel [online]. March 2009 [cited
March 22, 2009].
[2] Canadian Space Agency. Radarsat-2 information [online]. March 2009 [cited
March 15].
[3] Martin Mikulas, Thomas W. Murphey, Thomas C. Jones. Tension aligned deployable structures for large 1-d and 2-d array applications. 49th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, number AIAA 2008-2243, 2008.
[4] Thomas W. Murphey, M. Scherbarth. Isat government seit structures reference
designs and analytical models. Contractor presentation, AFRL, October 2004.
[5] M. Leipold, H. Runge, C. Sickinger. Large sar membrane antennas with
lightweight deployable booms. 28th ESA Antenna Workshop on Space Antenna
Systems and Technologies. ESTEC, 2005.
[6] D. J. Gorman. Free Vibration Analysis of Beams and Shafts. John Wiley, New
York, 1975.
[7] Robert D. Blevins. Formulas for Natural Frequency and Mode Shape. Van Nostrand Reinhold Company, 1979.
[8] Madhujit Mukhopadhyay. Vibrations, Dynamics and Structural Systems. A. A.
Balkema, 2000.
[9] Francis J. Shaker. Effect of axial load on mode shapes and frequencies of beams.
Technical Note D-8109, NASA, Lewis Research Center, Cleveland, OH 44135,
1975.
[10] A. E. Galef. Bending frequencies of compressed beams. Journal of the Acoustical
Society of America, 44(8):643, 1968.
[11] D. F. Pilkington, J. B. Cara. Vibration of beams subjected to end and axially
distributed loading. Journal of Mechanical Engineering Science, 12(1):70–72,
1970.
[12] A. Bokaian. Natural frequencies of beams under compressive axial loads. Journal
of Sound and Vibration, 126(1):49–65, 1988.
[13] X. Q. Liu, R. C. Ertekin, H. R. Riggs. Vibration of a free-free beam under tensile
axial loads. Journal of Sound and Vibration, 190(2):273–282, 1996.
[14] Vincenzo Gattulli, Massimiliano Morandini, Achille Paolone. A parametric analytical model for non-linear dynamics in cable-stayed beam. Earthquake Engineering and Structural Dynamics, 31:1281–1300, 2002.
61
[15] Vincenzo Gattulli, Marco Lepidi. Nonlinear interactions in the planar dynamics
of cable-stayed beam. International Journal of Solids and Structures, 40:4729–
4748, 2003.
[16] Thomas C. Jones, Hilary Bart-Smith, Martin Mikulas, Judith Watson. Finite
element modeling and analysis of large pretensioned space structures. Journal
of Spacecraft and Rockets, 44(1):183–193, January 2007.
[17] Thomas C. Jones, Judith J. Watson, Martin Mikulas, Hilary Bart-Smith. Design and analysis of tension-aligned large aperture sensorcraft. 49th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, number AIAA 2008-1775, 2008.
[18] W. Zhang, D. X. Cao. Studies on bifurcation and chaos of a string-beam coupled
system with two degrees-of-freedom. Nonlinear Dynamics, 45:131–147, 2005.
[19] Dongxing Cao, Wei Zhang. Analysis on nonlinear dynamics of a string-beam
coupled system. International Journal of Nonlinear Sciences and Numerical
Simulation, 6(1):47–54, 2005.
[20] Gong Cheng, Jean W. Zu. Dynamic analysis of an optical fiber coupler in
telecommunications. Journal of Sound and Vibration, 268:15–31, 2003.
[21] John M. Hedgepath. Critical requirements for the design of large space structures. Contractor Report 3484, NASA, 1981.
[22] Mark Lake, Lee Peterson, Martin Mikulas. Space structures on the back of an
envelope: John hedgepath’s design approach. Journal of Spacecraft and Rockets,
43(6):1174–118, December 2006.
[23] Thomas W. Murphey. Booms and Trusses, Chapter 3 in Recent Advances in
Gossamar Spacecraft (C.H.M. Jenkins, editor). AIAA, 2006.
[24] Stephen P. Timoshenko, James M. Gere. Theory of Elastic Stability. McGrawHill, edition 2nd, 1961.
62
APPENDICES
63
APPENDIX A
ABAQUS FEM CODE
64
FEM Code
The following are input files used to run the numerical analysis through ABAQUS
finite element software. Code is shown for the support only model and for the supportpayload model.
Support Only ABAQUS Code
*HEADING
Free-Free Model Mass Ratio 1/2 N=2 Truss
**BEAM ELEMENT
** —————————————–
** NODES
*NODE
1,
51,10
*NGEN
1,51
*NSET, NSET=SUPLFTEND
1
*NSET, NSET=SUPRGHTEND
51
** —————————————–
** ELEMENTS
*ELEMENT, TYPE=B21H
1,1,2
*ELGEN,ELSET=ESUPP
1,50
** —————————————–
** MATERIAL PROPERTIES
*BEAM GENERAL SECTION, DENSITY=45.454,ELSET=ESUPP
0.01,8.33333E-6,0,8.33333E-6,3.79E5
7E10,2.7E10
** —————————————–
** Prestress
*Initial Conditions, type=stress
65
ESUP, 4.174E6
** —————————————–
** STEP: Equilize
*STEP, NLGEOM
EQUILIZE PRESTRESS
*STATIC
1., 1., 1e-05, 1.
**
*Output, field, variable=preselect
*END STEP
** —————————————–
** STEP: Frequency
*STEP,NLGEOM
FREQUENCY CALCULATION
*FREQUENCY
10,0.001,,
*END STEP
** —————————————–
Support Payload ABAQUS Input File
*HEADING
Free-Free Model Mass Ratio 1/2 N=2 Truss
**BEAM ELEMENT
** —————————————–
** NODES
*NODE
1,
51,10
101,
151,10
*NGEN
1,51
101,151
*NSET, NSET=SUPLFTEND
1
*NSET, NSET=SUPRGHTEND
51
*NSET, NSET=PAYLFTEND
101
66
*NSET, NSET=PAYRGHTEND
151
** —————————————–
** ELEMENTS
*ELEMENT, TYPE=B21H
1,1,2
*ELEMENT, TYPE=T2D2H
101,101,102
*ELGEN,ELSET=ESUPP
1,50
*ELGEN,ELSET=EPAY
101,50
** —————————————–
** MATERIAL PROPERTIES
*BEAM GENERAL SECTION, DENSITY=45.454,ELSET=ESUPP
0.01,8.33333E-6,0,8.33333E-6,3.79E5
7E10,2.7E10
*SOLID SECTION, MATERIAL=EMAT,ELSET=EPAY
0.01
*MATERIAL, NAME=EMAT
*ELASTIC
7E8,0.3
*NO COMPRESSION
*DENSITY
454.545
** —————————————–
** Prestress
*Initial Conditions, type=stress
EPAY, 4.174E6
** —————————————–
** ELEMENT TIES
*SURFACE,TYPE=NODE,NAME=RGHTPAY
151,1
*SURFACE,TYPE=NODE,NAME=RGHTSUP
51,1
*SURFACE,TYPE=NODE,NAME=LFTPAY
101,1
*SURFACE,TYPE=NODE,NAME=LFTSUP
1,1
*TIE,NAME=RGHT
RGHTPAY,RGHTSUP
67
*TIE,NAME=LFT
LFTPAY,LFTSUP
** —————————————–
** STEP: Equilize
*STEP, NLGEOM
EQUILIZE PRESTRESS
*STATIC
1., 1., 1e-05, 1.
**
*Output, field, variable=preselect
*END STEP
** —————————————–
** STEP: Frequency
*STEP,NLGEOM
FREQUENCY CALCULATION
*FREQUENCY
10,0.001,,
*END STEP
** —————————————–
68
APPENDIX B
SOLUTION AND CONSTANT VALIDATION
69
Solution and Constant Validation:
To confirm the solution of the equilibrium
equation for the support member and the verify the constant solution, let:
ws (x, t) = e(iωt) e(αx)
(88)
Plugging into the solution for the support equation (Eq. 17)
∂ 4 ' (iωt) (αx) ( T L2 ∂ 2 ' (iωt) (αx) ( µs L4 ∂ 2 ' (iωt) (αx) (
e
e
+
e
e
+
e
e
=0
∂x4
EI ∂x2
EI ∂t2
(89)
Taking the derivatives and simplifying gives:
'
(
T L2 ' (iωt) (αx) ( µs L4 2 (iωt) (αx)
α4 e(iωt) e(αx) + α2
e
e
−
ω {e
e }=0
EI
EI
!
"
2
' (iωt) (αx) (
µs L 4 ω 2
4
2TL
e
e
α +α
−
=0
EI
EI
(90)
Then for this equation to be non-trivial the following must be true.
α4 + α2
T L 2 µs L 4 ω 2
−
=0
EI
EI
(91)
Solving Eq. 91 with the quadratic equation yields
α2
α2
#!
"2
1 T L2 1
T L2
µs L 4 ω 2
= −
±
+4
2 EI
2
EI
EI
9
k2
k4
= − ±
+ β4
2
4
(92)
(93)
70
This results in 2 solutions for α2 . Letting α12 = α2 and α22 = −α2 the constants can
be determined as:
α1
α2
#
9
k2
k4
=
− +
+ β4
2
4
#
9
k2
k4
= i
+
+ β4
2
4
(94)
(95)
Note this gives a different result when the beam is in tension. Working with Eq. 88
and the constants derived in Eqs. 94 and 95, the solutions for w can be written in
Eqs. 96 and 97.
w1 (x, t) = e(iωt) e(α1 x)
(96)
w2 (x, t) = e(iωt) e(iα2 x)
(97)
Combining to obtain an equation for ws and considering the spatial component gives,
Eqs. 98 and 99:
ws (x, t) = C1 w1 + C3 w2
= C1 eα1 x + C3 eiα2 x
(98)
(99)
Observing each solution independently shows
α1 x
C1 e
!
"
eα1 x eα1 x e−α1 x e−α1 x
= C1
+
+
−
2
2
2
2
7! α1 x
" ! α1 x
"8
−α1 x
e
e
e
e−α1 x
= C1
−
+
+
2
2
2
2
= C1 sinh α1 x + C2 cosh α1 x
(100)
(101)
(102)
71
iα2 x
C3 e
!
"
eiα2 x eiα2 x e−iα2 x e−iα2 x
= C3
+
+
−
2
2
2
2
7! iα2 x
" ! iα2 x
"8
−iα2 x
e
e
e
e−iα2 x
= C3
−
+
+
2
2
2
2
= C3 sin α2 x + C4 cos α2 x
(103)
(104)
(105)
The solutions for w1 and w2 can be combined to give
ws (x) = C1 sinh α1 x + C2 cosh α1 x + C3 sin α2 x + C4 cos α2 x
(106)
Additionally, it can be shown that this solution is valid for every value of x. This
can be shown by plugging Eq. 33 into Eq. 23. A valid solution will produce a valid
equation regardless of the value of x. Taking second and forth order differentials of
Eq. 33 gives:
ws## (x) = C1 α12 sinh α1 x + C2 α12 cosh α1 x − C3 α22 sin α2 x − C4 α22 cos α2 x
wsiv (x) = C1 α14 sinh α1 x + C2 α14 cosh α1 x + C3 α24 sin α2 x + C4 α24 cos α2 x
Substituting into Eq. 23 gives:
C1 α14 sinh α1 x + C2 α14 cosh α1 x + C3 α24 sin α2 x + C4 α24 cos α2 x
,
.
+k 2 C1 α12 sinh α1 x + C2 α12 cosh α1 x − C3 α22 sin α2 x − C4 α22 cos α2 x
−β 4 (C1 sinh α1 x + C2 cosh α1 x + C3 cos α2 x + C4 sin α2 x) = 0
(107)
Grouping the constants of Eq. 107 and simplifying gives:
,
.
,
.
C1 sinh α1 x α14 + k 2 α12 − β 4 + C2 cosh α1 x α14 + k 2 α12 − β 4
,
.
,
.
+C3 sin α2 x α24 − k 2 α22 − β 4 + C4 cos α2 x α24 − k 2 α22 − β 4 = 0
(108)
72
For Eq. 108 to be valid for all values of x, the parenthesized components must equate
to zero. But it can be seen that the hyperbolic terms and the sinusoidal terms each
have the same parenthesized components. This gives 2 equations to solve:
α14 + k 2 α12 − β 4 = 0
(109)
α14 − k 2 α12 − β 4 = 0
(110)
Using the definitions for α1 and α2 from Eqs. 94 and 95 each equation can be shown
to be valid. For the hyperbolic terms (Eq. 109) the equation can be simplified as:
:
2
−k +
2
9
k4
4
+ β4
;1/2 4
:
2
+ k2 − k +
2
9
k4
4
+ β4
;1/2 2
− β4 = 0
(111)
Expanding each term yields:
*
4
2
k
k
−
4
2
9
k4
4
2
+ β4 −
k
2
9
k4
+
4
k
+ β4
4
4
*
+
9
4
2
4
k
k
k
+ − +
+ β4 − β4 = 0
2
2
4
+ β4 +
(112)
And finally grouping canceling components gives Eq. 113.
!
k4 k4
−
2
2
"
+
:
−k 2
9
k4
+ β 4 + k2
4
9
k4
+ β4
4
;
,
.
+ β4 − β4 = 0
(113)
Which validates the solution since:
0=0
Therefore any value of x or Cn ’s the solution is valid.
(114)
73
APPENDIX C
MATHEMATICA CODE
74
(*MassRatio = 1.0 TotalMass = 500 DerivedEquation *)
ClearAll[x, k, β, P ]
ClearAll[γ, α1, α2, ω]
(* Material Properties *)
MassRatio = 10.0; LoadRatio = Range[0, 1.0, 0.05]; TotalMass = 500;
(*Support Member *)
L = 10; Emod = 7 ∗ 10∧ 10; asup = 0.01; Iner = 8.3333333 ∗ 10∧ − 6; ρs = 4545.45; µs =
asup ∗ ρs ;
(*Payload Member *)
Emodp = 7 ∗ 10∧ 8; ρp = 454.55; apay = 0.01; µp = ρp ∗ apay;
(* Member calculations *)
mass = (µs ∗ L + µp ∗ L)
500.
massratio = µs /µp
0.100001
(*Load Values *)
Tcr = Pi∧ 2 ∗ Emod ∗ Iner/(L∧ 2)
57572.7
(*P = Pcr ∗ LoadRatio *)
T = Tcr ∗ LoadRatio
{0., 5757.27, 11514.5, 17271.8, 23029.1, 28786.3, 34543.6, 40300.9, 46058.2, 51815.4,
57572.7}
σ = T /asup;
(*System Values *)
β4th = µs ∗ ω ∧ 2 ∗ L∧ 4/(Emod ∗ Iner);
β = β4th∧ (1/4);
75
k = Sqrt[T ∗ L∧ 2/(Emod ∗ Iner)]
{0., 0.993459, 1.40496, 1.72072, 1.98692, 2.22144, 2.43347, 2.62844, 2.80993,
2.98038, 3.14159}
freq = (4.73∧ 2)/(2 ∗ Pi) ∗ Sqrt [Emod ∗ Iner /(µs ∗ L∧ 4)]
4.03378
α1:=(−k ∧ 2/2 + Sqrt[k ∧ 4/4 + β ∧ 4])∧ (1/2);
α2:=(k ∧ 2/2 + Sqrt[k ∧ 4/4 + β ∧ 4])∧ (1/2);
char:=(2 ∗ β ∧ 6 ∗ (1 − Cos[α2]Cosh[α1]) + (α2∧ 6 − α1∧ 6)Sin[α2]Sinh[α1])
char;
f [q ]:=char/.ω → q
Plot[f [q], {q, 0, 40}, PlotRange → {−0.5, 0.5}]
0.4
0.2
10
!0.2
!0.4
FindRoot[f [q][[5]], {q, 30}]
{q → 19.7323}
new = q/.%
19.7323
new
19.7323
count = Length[LoadRatio]
11
20
30
40
76
supRoots = Table[0, {i, count}]
{0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0}
supRoots
{0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0}
For[i = 1, i < count + 1, i++, Print[(supRoots[[i]] = (new = q/.FindRoot[f [q][[i]],
{q, 40}])/(2 ∗ Pi))]]
4.03385
3.83156
3.61697
3.38769
3.14049
2.87067
2.57109
2.22971
1.82312
1.291
5.177421135571432`*∧ -8
supRoots
{4.03385, 3.83156, 3.61697, 3.38769, 3.14049, 2.87067, 2.57109, 2.22971, 1.82312, 1.291,
5.177421135571432`*∧ -8}
(* Frequency values *)
supFreq = Table [ai,j , {i, 1, count}, {j, 1, 2}]
{{a1,1 , a1,2 } , {a2,1 , a2,2 } , {a3,1 , a3,2 } , {a4,1 , a4,2 } , {a5,1 , a5,2 } , {a6,1 , a6,2 } , {a7,1 , a7,2 } ,
{a8,1 , a8,2 } , {a9,1 , a9,2 } , {a10,1 , a10,2 } , {a11,1 , a11,2 }}
For[i = 1, i < count + 1, i++, {supFreq[[i, 1]] = LoadRatio[[i]], supFreq[[i, 2]] =
supRoots[[i]]}]
77
supFreq
{{0., 4.03385}, {0.1, 3.83156}, {0.2, 3.61697}, {0.3, 3.38769}, {0.4, 3.14049},
{0.5, 2.87067}, {0.6, 2.57109}, {0.7, 2.22971}, {0.8, 1.82312}, {0.9, 1.291},
{1., 5.177421135571432`*∧ -8}}
(* Non − dimensionalized frequency values *)
supFreqNonDim = Table [ai,j , {i, 1, count}, {j, 1, 2}]
{{a1,1 , a1,2 } , {a2,1 , a2,2 } , {a3,1 , a3,2 } , {a4,1 , a4,2 } , {a5,1 , a5,2 } , {a6,1 , a6,2 } , {a7,1 , a7,2 } , }
{a8,1 , a8,2 } , {a9,1 , a9,2 } , {a10,1 , a10,2 } , {a11,1 , a11,2 }}
For[i = 1, i < count + 1, i++, {supFreqNonDim[[i, 1]] = LoadRatio[[i]],
supFreqNonDim[[i, 2]] = supRoots[[i]]/freq}]
supFreqNonDim
{{0., 1.00002}, {0.1, 0.949868}, {0.2, 0.896669}, {0.3, 0.83983}, {0.4, 0.778546},
{0.5, 0.711658}, {0.6, 0.63739}, {0.7, 0.55276}, {0.8, 0.451964},
{0.9, 0.320047}, {1., 1.2835155231068365`*∧ -8}}
ListPlot[supFreqNonDim, Frame → True, FrameLabel → {LoadRatio, FrequencyRatio},
PlotStyle → {Thick}]
1.0
Frequency Ratio
0.8
0.6
0.4
0.2
0.0
0.0
0.2
0.4
0.6
Load Ratio
(* Solve for Payload Equation *)
LoadRatio
{0., 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 1.}
0.8
1.0
78
payRoots = (1/(2 ∗ L)) ∗ (T /(µp )) ∧ (1/2)
{0., 1.77946, 2.51653, 3.08211, 3.55891, 3.97899, 4.35876, 4.708, 5.03306, 5.33837,
5.62714}
payRoots2 = (Pi/(2 ∗ L)) ∗ (T /(µp )) ∧ (1/2)
{0., 5.59033, 7.90592, 9.68273, 11.1807, 12.5004, 13.6935, 14.7906, 15.8118, 16.771,
17.6782}
payFreq = Table [ai,j , {i, 1, count}, {j, 1, 2}]
{{a1,1 , a1,2 } , {a2,1 , a2,2 } , {a3,1 , a3,2 } , {a4,1 , a4,2 } , {a5,1 , a5,2 } , {a6,1 , a6,2 } , {a7,1 , a7,2 } ,
{a8,1 , a8,2 } , {a9,1 , a9,2 } , {a10,1 , a10,2 } , {a11,1 , a11,2 }}
payFreq2 = Table [ai,j , {i, 1, count}, {j, 1, 2}]
{{a1,1 , a1,2 } , {a2,1 , a2,2 } , {a3,1 , a3,2 } , {a4,1 , a4,2 } , {a5,1 , a5,2 } , {a6,1 , a6,2 } , {a7,1 , a7,2 } ,
{a8,1 , a8,2 } , {a9,1 , a9,2 } , {a10,1 , a10,2 } , {a11,1 , a11,2 }}
For[i = 1, i < count + 1, i++, {payFreq[[i, 1]] = LoadRatio[[i]], payFreq[[i, 2]] =
payRoots[[i]]}]
For[i = 1, i < count + 1, i++, {payFreq2[[i, 1]] = LoadRatio[[i]], payFreq2[[i, 2]] =
payRoots2[[i]]}]
payFreq2
{{0., 0.}, {0.1, 5.59033}, {0.2, 7.90592}, {0.3, 9.68273}, {0.4, 11.1807}, {0.5, 12.5004},
{0.6, 13.6935}, {0.7, 14.7906}, {0.8, 15.8118}, {0.9, 16.771}, {1., 17.6782}}
ListPlot[payFreq, Frame → True, FrameLabel → {LoadRatio, FrequencyRatio}]
79
5
Frequency Ratio
4
3
2
1
0
0.0
0.2
0.4
0.6
0.8
1.0
Load Ratio
ListPlot[payFreq2, Frame → True, FrameLabel → {LoadRatio, FrequencyRatio}]
Frequency Ratio
15
10
5
0
0.0
0.2
0.4
0.6
0.8
1.0
Load Ratio
payFreq2
{{0., 0.}, {0.1, 5.59033}, {0.2, 7.90592}, {0.3, 9.68273}, {0.4, 11.1807}, {0.5, 12.5004},
{0.6, 13.6935}, {0.7, 14.7906}, {0.8, 15.8118}, {0.9, 16.771}, {1., 17.6782}}
(* Combined plots for payload and support *)
ListPlot[{payFreq2, supFreq}]
80
15
10
5
0.2
0.4
0.6
0.8
1.0