Computer Vision Colorado School of Mines Professor William Hoff
advertisement

Colorado School of Mines
Computer Vision
Professor William Hoff
Dept of Electrical Engineering &Computer Science
Colorado School of Mines
Computer Vision
http://inside.mines.edu/~whoff/
1
RANSAC
Colorado School of Mines
Computer Vision
2
Identifying Correct Matches
•
•
•
•
Let’s say that we want to match points from one image to another
We detect feature points in each image (e.g., SIFT points) and then match
their descriptors
Now we have a set of matching pairs, but some are incorrect
How do we identify the correct matches?
Graffiti image dataset from http://kahlan.eps.surrey.ac.uk/featurespace/web/data.htm
Colorado School of Mines
Computer Vision
3
SIFT Points from each image
Number of features detected: 1741
Colorado School of Mines
Number of features detected: 2052
Computer Vision
4
14
143
104
34255
162 30
103
440 252
164
385
33
91
23
237
240
263
325
Tentative matches (based on feature descriptors): 442
80
2279
68 23075
20
32
79
48 395
275
86
258
51
129
133
290
Tentative matches
278
333120426
41
38
338
128
208
204
202
125
124
201 427
47
216
215
130
132
376
49
53
340
270
269
102
330
396
429
161 401 98
101
182 329
341
257
256
99
415
16
441 85 386
65
289
274
221 131
399
398
418
354
293137 10
247
139
405 365
428
434
358165
223
226 378
225
93
420
419
346
314
260 267
220
362
288
304
262
196
59 138
58
244166 322 179109 261
203
197
430 309 27
432
183
423 259
332
371
54
152
438
437
175
174
277
276
191
339
181
281
41422
413
178
306
173
271
92
214
74
242
241
189114
439347
194 199273
123
105
285
384
424
94
76
228
344
400
146 21
31
108
200 394
145
144
233 151
308
307
282
388 361442
207
335
334
302 153
397
305
392
117
45 213
291
348
360 172
286
157
193 425
352 412
379
268
431
236
368
326
206372
421
287
78
406
217
297
296
407
42
389
60
19
353 17
380
337
110
87 163
176
243
186
369
81
375
410
245167
170323
169
112
370
100
50
188
313
62
35
37119
248
61
115
2
70140
134
390 364
212
435
126
311
18
324
69
265
192 433
111
190
298
180
402
142
417
422
135350
345
436
187
185
355
107
363
391
367
366
411 150 24
373342374283
36
158357
39
264
403
46
136
319 177
318
218
284
377
13
239 356
238
295
349
89312359
83
82
393 336 408
96
95
84
210 343
106
198
272
43
8890
147 383
116
11
280
279
235
156 25
205
211
66
231381
40
160 316 317
184
382
127
294
310
209
26
97
299
118122
351
321
64 229
246
254
1 67
29
224
315
44
149
292
73 77
52
219
387
168
253
320
28
232 303
250
249
222
416
15
57
301
328
154
3 300141 148
121
55
251
171
409
113
159
8
7
155
404
327
634 71 12
234
195
72
266
331
56
Colorado School of Mines
164
34
56
Computer Vision
227
20
80
131
162
9
86
68
230
75
65
16
137
293
399
10354398
226 139
225
378
59 138
58
79
30
237
255
440
103
252
240385
91
33
41
55
57
219
263
275
23
325
129
54
44
48
52
32
222
426278
395
338
161
441
128
208
4188538640198
102 258
101
99
344
257
256
270
269
182329
330
216
215
204
290
420
419
247
134
304
165
358
105
202
125
124
93
314
377
376
405365
74 413
22 430309
53
201
228
414152
274 427 340
166362
27 244
223
306
333
341
322179 260
76 21 384
145
438
437
109261
429 396
146
434
262267
92
144
233
242
241
151
175432
174
423183 196
173
178
181259
428
221
308 400 94
307
197
332
35
51
106
47
302153
191
203
46
114
38
189
289
194199
352
379
305
271 276
442
424
388361
277 371
412
220
346
297
296
108
273
123
339
78
60
157
281
353 19
380
236
214
200
17
431360
62 410
172 392
61
409
104
347
439
81
2 70
285
335394
334
132
140
421
87
117
193 425
326 268
207 282
163 389
243
406
36 435
69
245
313
176 110 368
167
298
100
170
169
135
291
248 323
186
350 142
407 206
372213
188
112 369337
18
311 390
370
286
411 436
364
31
217
136
115 37
417
324
348
150 355
402
287
295
349
180 265
192433
111
422 190
126 212
239356
238
363 107185
391
375
357
187
403
83
82
367
366
319
318
359
177
147
66
31295
84
264
96
231 383
294
39
15625 88
345
382 235
90
229 381
299
373
14130
393
64 351
342
374
283 143
160
336
1 67
26 310 316317
292
218
284
43 198
116
272408
73 149
97
184
210343
77
89
155
158
280
279
127
40
205
246
321
29
232303
301
15
211
3 300
387315 254
118
13
5
50
122
209
8 141 148 154 416 28 249
7
168
253
320
63
250
4 71 12
159
234
72
251
171
6
404
328
113
121
327
195
266
331
133
415
56
42
49
11
24
45
119
120
224
288
397
5
% Demonstrate the matching of a plane, from one image to another.
clear variables
close all
%rng(0);
% Reset random number generator
Find SIFT points in
images (1 of 3)
% Read in test images.
I1 = imread('img1.png');
I2 = imread('img3.png');
% If color, convert them to grayscale
if size(I1,3)>1
I1 = rgb2gray(I1);
if size(I2,3)>1
I2 = rgb2gray(I2);
end
end
% Extract SIFT features.
% First make sure the vl_sift code is in the path
if exist('vl_sift', 'file')==0
run('C:\Users\William\Documents\Research\vlfeat-0.9.20\toolbox\vl_setup');
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% First image
I1 = single(I1); % Convert to single precision floating point
figure(1), imshow(I1,[]);
% These parameters limit the number of features detected
peak_thresh = 0;
% increase to limit; default is 0
edge_thresh = 10;
% decrease to limit; default is 10
[f1,d1] = vl_sift(I1, ...
'PeakThresh', peak_thresh, ...
'edgethresh', edge_thresh );
fprintf('Number of frames (features) detected: %d\n', size(f1,2));
% Show all SIFT features detected
h = vl_plotframe(f1) ;
set(h,'color','y','linewidth',1.5) ;
Colorado School of Mines
Computer Vision
6
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Second image
I2 = single(I2);
figure(2), imshow(I2,[]);
[f2,d2] = vl_sift(I2, ...
'PeakThresh', peak_thresh, ...
'edgethresh', edge_thresh );
fprintf('Number of frames (features) detected: %d\n', size(f2,2));
Find SIFT points in
images (2 of 3)
% Show all SIFT features detected
h
= vl_plotframe(f2) ;
set(h,'color','y','linewidth',1.5) ;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Match features
% The index of the original match and the closest descriptor is stored in
% each column of matches and the distance between the pair is stored in
% scores.
% Define threshold for matching. Descriptor D1 is matched to a descriptor
% D2 only if the distance d(D1,D2) multiplied by THRESH is not greater than
% the distance of D1 to all other descriptors
thresh = 1.5;
% default = 1.5; increase to limit matches
[matches, scores] = vl_ubcmatch(d1, d2, thresh);
fprintf('Number of matching frames (features): %d\n', size(matches,2));
indices1 = matches(1,:);
f1match = f1(:,indices1);
d1match = d1(:,indices1);
% Get matching features
indices2 = matches(2,:);
f2match = f2(:,indices2);
d2match = d2(:,indices2);
Colorado School of Mines
Computer Vision
7
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Show matches
figure(3), imshow([I1,I2],[]);
o = size(I1,2) ;
line([f1match(1,:);f2match(1,:)+o], ...
[f1match(2,:);f2match(2,:)]) ;
for i=1:size(f1match,2)
x = f1match(1,i);
y = f1match(2,i);
text(x,y,sprintf('%d',i), 'Color', 'r');
end
for i=1:size(f2match,2)
x = f2match(1,i);
y = f2match(2,i);
text(x+o,y,sprintf('%d',i), 'Color', 'r');
end
Colorado School of Mines
Computer Vision
Find SIFT points in
images (3 of 3)
8
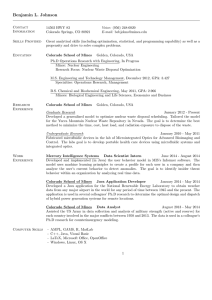
Identifying incorrect matches
• We find a transformation that explains the
movement of the greatest number of matches
– Those points that agree with that transformation are
correct (inliers)
– All other matches are outliers and are discarded
• What transformation to use?
– Depends on your application ... for a planar object, you
could use a homography (projective transform)
– To fit a homography, requires at least 4 corresponding
image points
How to find this transformation?
Colorado School of Mines
Computer Vision
9
Algorithm (RANSAC)
1) Randomly select a minimal set of points and solve
for the transformation
2) Count the number of points that agree with this
transformation
3) If this transformation has the highest number of
inliers so far, save it
4) Repeat for N trials and return the best
transformation
Colorado School of Mines
Computer Vision
10
Example: line fitting
We will randomly
select subsets of 2
points (since 2 is the
minimum number of
points to fit a line)
Colorado School of Mines
Computer Vision
Example: line fitting
n=2
Colorado School of Mines
Computer Vision
Model fitting
Colorado School of Mines
Computer Vision
Measure distances
Colorado School of Mines
Computer Vision
Count inliers
c=3
Colorado School of Mines
Computer Vision
Another trial
c=3
Colorado School of Mines
Computer Vision
The best model
c=15
Colorado School of Mines
Computer Vision
RANSAC Algorithm
• “Random Sample Consensus”
– Can be used to find inliers for any type of model fitting
• Widely used in computer vision
• Requires two parameters:
– The number of trials N (how many do we need?)
– The agreement threshold (how close does an inlier have to
be?)
Fischler, M. A., & Bolles, R. C. 1981. Random sampling consensus: A paradigm for model fitting
with applications to image analysis and automated cartography. Communications of the
Associations for Computing Machinery, 24(26), 381–395.
Colorado School of Mines
Computer Vision
18
Number of samples (trials) required
Try example:
e = 0.5
p = 0.99
s=2
N = 10
•
Assume we know e, the probability that a point is an outlier
•
The probability that a sample of size s is all inliers is (1- e)s
•
With N samples (trials), the probability that all samples have at least one
outlier is palloutliers = (1-(1- e)s )N
•
We want at least one sample to have no outliers. The probability is
pnotalloutliers = 1 - palloutliers
•
We’ll pick pnotalloutliers to be some high value, like 0.99.
•
If we know e, we can solve for N
– So (1- e) is the probability that any point is an inlier
– So 1-(1- e)s is the probability of getting at least one outlier in that sample
log(1 pnotalloutliers )
N
log(1 (1 e ) s )
Colorado School of Mines
N is the number of trials needed to
get at least one sample of all inliers,
with probability pnotalloutliers
Computer Vision
19
Number of samples required
Colorado School of Mines
Computer Vision
20
Better estimate for required number of trials
•
Again, assume we know e, the probability that a point is
an outlier
– So (1- e) is the probability that any point is an inlier
•
Assume we have M total points. The estimated number
of inliers is 𝑛𝑖𝑛𝑙𝑖𝑒𝑟 = 1 − 𝜀 𝑀
“n choose k” is
the number of
ways to choose k
items from a set
of n items
n
n!
k k!(n k )!
•
The number of ways we can pick a sample of s points out
𝑀
of M points is 𝑚 =
𝑠
•
The number of ways we can choose s points that are all
𝑛𝑖𝑛𝑙𝑖𝑒𝑟
inliers is 𝑛 =
𝑠
•
The probability that any sample of s points is all inliers is
p=n/m
N is the number of trials needed to
log(1 pnotalloutliers )
N
get at least one sample of all inliers,
log(1 p )
with probability pnotalloutliers
Colorado School of Mines
Computer Vision
21
Estimating outlier probability
• If you don’t know the outlier probability e in
advance, you can estimate it from the data:
– Start with a very conservative guess for e (say, 0.9)
– Compute the number of trials required ... it will be very
large
– Each time you get a fit, count the number of inliers
– If the number of inliers is the best so far, revise your
estimate of e: 𝜀 = (1 − 𝑛𝑖𝑛𝑙𝑖𝑒𝑟 )/𝑀
– Recompute the number of trials required using the new
estimate of e and continue
Colorado School of Mines
Computer Vision
22
Deciding if a point is an inlier
• You can just pick a threshold for a point’s residual error, for it
to be counted as an inlier (e.g., you could measure this
empirically)
• Another strategy:
– Compute the conditional probability of the residual assuming that it is
an inlier, and compare it to the conditional probability of the residual
assuming that it is an outlier
– Namely, test if 𝑃 𝑟 𝑖𝑛𝑙𝑖𝑒𝑟 > 𝑃(𝑟|𝑜𝑢𝑡𝑙𝑖𝑒𝑟)
– Typically, we assume inliers have Gaussian distributed noise (with
standard deviation s), and outliers have uniform distributed noise
– This approach is called MSAC (“m-estimator sample consensus”)
P. H. S. Torr , A. Zisserman, "MLESAC: A new robust estimator with application to estimating image
geometry" , Computer Vision and Image Understanding, vol 78 Issue 1, April 2000, pp 138 - 156.
http://www.robots.ox.ac.uk/~vgg/publications/2000/Torr00/torr00.pdf
Colorado School of Mines
Computer Vision
23
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Fit homography to corresponding points. Use the MLESAC (m-estimator
% sample consensus) algorithm to find inliers. See the paper: "MLESAC: A
% new robust estimator with application to estimating image geometry" by
% Torr and Zisserman, at
% http://www.robots.ox.ac.uk/~vgg/publications/2000/Torr00/torr00.pdf
MLESAC code (1 of 5)
N = size(f1match,2);
% Number of corresponding point pairs
pts1 = f1match(1:2,:)'; % Get x,y coordinates from image 1, size is (N,2)
pts2 = f2match(1:2,:)'; % Get x,y coordinates from image 2, size is (N,2)
%
%
%
%
S
Estimate the uncertainty of point locations in the second image. We'll
assume Gaussian distributed residual errors, with a sigma of S pixels.
Actually, points found in higher scales will have proportionally larger
errors.
= 1.0;
% Sigma of errors of points found in lowest scale
% Create a 2xN matrix of sigmas for each point, where each column is the
% sigmax, sigmay values for that point.
sigmas = [S * f2match(3,:); S * f2match(3,:)]; % Assume same for x,y
% We will need the sigmas as a Nx2 matrix.
sigs = sigmas';
% Now, if a point is an outlier, its residual error can be anything; i.e.,
% any value between 0 and the size of the image. Let's
% assume a uniform probability distribution.
pOutlier = 1/(size(I1,1)*size(I1,2));
% Estimate the fraction of inliers. We'll actually estimate this later
% from the data, but start with a worst case scenario assumption.
inlierFraction = 0.1;
% Let's say that we want to get a good sample with probability Ps.
Ps = 0.99;
Colorado School of Mines
Computer Vision
24
% Determine the required number of iterations
nInlier = round(N*inlierFraction); % number of inliers among the N points
% Calculate the number of ways to pick a set of 4 points, out of N points.
% This is "N-choose-4", which is N*(N-1)*(N-2)*(N-3)/factorial(4).
m = nInlier*(nInlier-1)*(nInlier-2)*(nInlier-3)/factorial(4); % #ways to choose 4 inliers
n = N*(N-1)*(N-2)*(N-3)/factorial(4); % #ways to choose 4 points
p = m/n;
% probability that any sample of 4 points is all inliers
nIterations = log(1-Ps) / log(1 - p);
nIterations = ceil(nIterations);
fprintf('Initial estimated number of iterations needed: %d\n', nIterations);
MLESAC code (2 of 5)
sample_count = 0;
% The number of Ransac trials
pBest = -Inf;
% Best probability found so far (actually, the log)
while sample_count < nIterations
% Grab 4 matching points at random
v = randperm(N);
p1 = pts1(v(1:4),:);
p2 = pts2(v(1:4),:);
% Try fitting a homography, that transforms p1 to p2. Fitting will
% fail if points are co-linear, so do a "catch" that so the program
% doesn't quit. Also, Matlab will display a warning if the result is
% close to singular, so turn warnings temporarily off.
warning('off', 'all');
try
tform_1_2 = cp2tform(p1,p2,'projective');
catch
continue;
end
warning('on', 'all');
% Ok, we were able to fit a homography to this sample.
sample_count = sample_count + 1;
% Use that homography to transform all pts1 to pts2
pts2map = tformfwd(pts1, tform_1_2);
% Look at the residual errors of all the points.
dp = (pts2map - pts2);
% Size is Nx2
Colorado School of Mines
Computer Vision
25
% Compute the probability that each residual error, dpi, could be an
% inlier. This is the equation of a Gaussian; ie.
%
G(dpi) = exp(-dpi' * Ci^-1 * dpi)/(2*pi*det(Ci)^0.5)
% where Ci is the covariance matrix of residual dpi:
%
Ci = [ sxi^2 0; 0 syi^2 ]
% Note that det(Ci)^0.5 = sxi*syi
dp = dp ./ sigs;
% Scale by the sigmas
rsq = dp(:,1).^2 + dp(:,2).^2;
% residual squared distance errors
numerator = exp(-rsq/2);
% Numerator of Gaussians, size is Nx1
denominator = 2*pi*sigs(:,1).*sigs(:,2);
% Denominator, size Nx1
MLESAC code (3 of 5)
% These are the probabilities of each point, if they are inliers (ie,
% this is just the Gaussian probability of the error).
pInlier = numerator./denominator;
% Let's define inliers to be those points whose inlier probability is
% greater than the outlier probability.
indicesInliers = (pInlier > pOutlier);
nInlier = sum(indicesInliers);
% Update the number of iterations required
if nInlier/N > inlierFraction
inlierFraction = nInlier/N;
m = nInlier*(nInlier-1)*(nInlier-2)*(nInlier-3)/factorial(4);
n = N*(N-1)*(N-2)*(N-3)/factorial(4); % #ways to choose 4 points
p = m/n; % probability that any sample of 4 points is all inliers
nIterations = log(1-Ps) / log(1 - p);
nIterations = ceil(nIterations);
fprintf('(Iteration %d): New estimated number of iterations needed: %d\n', ...
sample_count, nIterations);
end
% Net probability of the data (log)
p = sum(log(pInlier(indicesInliers))) + (N-nInlier)*log(pOutlier);
Colorado School of Mines
Computer Vision
26
% Keep this solution if probability is better than the best so far.
if p>pBest
pBest = p;
nBest = nInlier;
indicesBest = indicesInliers;
fprintf(' (Iter %d): best so far with %d inliers, p=%f\n', ...
sample_count, nInlier, p);
%disp(find(indicesBest)');
MLESAC code (4 of 5)
% Show inliers
figure(4), imshow([I1,I2],[]);
o = size(I1,2) ;
for i=1:size(f1match,2)
x1 = f1match(1,i);
y1 = f1match(2,i);
x2 = f2match(1,i);
y2 = f2match(2,i);
if indicesBest(i)
text(x1,y1,sprintf('%d',i), 'Color', 'g');
text(x2+o,y2,sprintf('%d',i), 'Color', 'g');
else
text(x1,y1,sprintf('%d',i), 'Color', 'r');
text(x2+o,y2,sprintf('%d',i), 'Color', 'r');
end
end
pause
end
end
fprintf('Final number of iterations used: %d\n', sample_count);
fprintf('Estimated inlier fraction: %f\n', inlierFraction);
% Show the final inliers
f1Inlier = f1match(:,indicesBest);
f2Inlier = f2match(:,indicesBest);
figure, subplot(1,2,1), imshow(I1,[]);
h = vl_plotframe(f1Inlier) ;
set(h,'color','y','linewidth',1.5) ;
subplot(1,2,2), imshow(I2,[]);
h = vl_plotframe(f2Inlier) ;
set(h,'color','y','linewidth',1.5) ;
Colorado School of Mines
Computer Vision
27
% Ok, refit homography using all the inliers.
p1 = pts1(indicesBest,:);
p2 = pts2(indicesBest,:);
tform_1_2 = cp2tform(p1,p2,'projective');
% Use that homography to transform all p1 to p2
p2map = tformfwd(p1, tform_1_2);
MLESAC code (5 of 5)
% Look at the residual errors of all the points.
dp = (p2map - p2);
rsq = dp(:,1).^2 + dp(:,2).^2;
% residual squared distance errors
rmsErr = sqrt( sum(rsq)/nBest );
disp('RMS error: '), disp(rmsErr);
% Get the 3x3 homography matrix, such that p2 = H*p1.
Hom_1_2 = tform_1_2.tdata.T';
I1warp = imtransform(I1, tform_1_2, ...
'XData',[1,size(I1,2)], ...
'YData',[1,size(I1,1)]);
% Overlay the images
RGB(:,:,1) = (I1warp+I2)/2;
RGB(:,:,2) = (I1warp+I2)/2;
RGB(:,:,3) = I2/2;
RGB = uint8(RGB);
figure, imshow(RGB);
% Also show a difference image
Idiff = I2 - I1warp;
figure, imshow(abs(Idiff),[]);
Colorado School of Mines
Computer Vision
28
14
143
104
34255
162 30
103
440 252
164
385
33
91
23
237
240
263
325
80
2279
68 23075
372
inliers
20
51
129
278
333120426
41
38
32
79
48 395
275
86
258
338
128
208
204
202
124
125
201 427
47
215
216
130
133
30
237
255
440
103
252
240385
91
290
132
376
49
53
340
269
270
102
329
396
429
161 401 99
101
182 330
341
256
257
98
415
16
441 85 386
65
289
274
221 131
398
399
418
354
137
10
293
247
139
405 365
428
434
358165
223
225 378
226
93
419
420
346
314
260 267
220
362
288
304
261
196
58 138
59
244166 322 179109 262
203
197
430 309 27
432
183
423 259
332
371
54
152
437
438
174
175
276
277
191
339
181
281
41322
414
178
306
173
271
92
214
74
241
242
189114
439347
194 199273
123
105
285
384
424
94
76
228
344
400
146 21
31
108
200 394
144
145
233 151
307
308
282
388 361442
207
153
334
335
302
397
305
392
117
45 213
291
348
360 172
286
157
193 425
352 412
379
268
431
236
368
326
206372
421
287
78
406
217
296
297
407
42
389
60
19
353 17
380
337
110
87 163
176
243
186
369
81
375
410
245167
169323
170
112
370
100
50
188
313
62
35
37119
248
61
115
2
70140
134
390 364
212
435
126
311
18
324
69
265
192 433
111
190
298
180
402
142
417
422
135350
345
436
187
185
355
107
363
391
366
367
411 150 24
373342374283
36
158356
39
264
403
46
136
318 177
319
218
284
377
13
238 357
239
295
349
89312359
82
83
393 336 408
95
96
84
210 343
106
198
272
43
8890
147 383
116
11
279
280
235
156 25
205
211
66
231382
40
160 316 317
184
381
127
294
310
209
26
97
299
118122
351
321
64 229
246 254
1 67
29
224
315
44
149
292
73 77
52
219
387
168
253
320
28
232 303
249
250
222
416
15
57
301
328
3 300141 148 154
121
55
251
171
409
113
159
7
8
155
404
327
634 71 12
234
195
72
266
331
56
difference image
Colorado School of Mines
164
34
56
86
227
20
80
131
162
9
68
230
75
65
16
137
293
398
10354399
225 139
226
378
58 138
59
79
219
263
33
41
55
57
275
129
54
44
48
52
32
222
426278
395
338
161
441
128
208
4188538640199
102 258
101
98
344
256
257
269
270
182330
329
215
216
204
290
419
420
247
134
304
165
358
105
202
124
125
93
314
376
377
405365
74 414
22 430309
53
201
228
413152
274 427 340
166362
27 244
223
306
333
341
322179 260
76 21 384
145
437
438
109262
429 396
146
434
261267
92
144
233
241
242
151
174432
175
423259
183 196
173
178
181
428
221
307 400 94
308
197
332
35
51
106
47
302
191
153
203
46
114
38
189
289
194199
352
379
305
271 277
442
424
388361
276
412
220
346
296
297
108
371
273
123
339
78
60
157
281
353 19
380
236
214
200
17
431360
62 410
172 392
61
409
104
347
439
81
2 70
285
334394
335
132
140
421
87
117
193 425
326 268
207 282
163 389
243
406
36 435
69
368
245
313
176
167
298
100
169
170
110
135
291
248
186
323
350 142
407
372213
188
112 369337 206
18
311 390
370
286
411 436
364
31
217
136
115 37
417
324
348
150 355
402
287
295
349
180 265
192433
111
422 190
126 212
238357
239
363 107185
391
375
356
187
403
82
83
366
367
318
319
359
177
147
66
31296
84
264
95
231 383
294
39
15625 88
345
381 235
90
229 382
299
373
14130
393
64 351
342
374
283 143
160
336
1 67
26 310 316317
292
218
284
43 198
116
272408
73 149
97
184
210343
77
89
155
158
279
280
127
40
205
246
321
29
232303
301
15
211
3 300
387315 254
118
13
5
50
122
209
7 141 148 154 416 28 250
8
168
253
320
63
249
4 71 12
159
234
72
251
171
6
404
328
113
121
327
195
266
331
23
325
56
42
49
11
24
45
119
120
224
288
397
fused image
Computer Vision
133
415
29