Computer Vision Colorado School of Mines Professor William Hoff
advertisement

Colorado School of Mines
Computer Vision
Professor William Hoff
Dept of Electrical Engineering &Computer Science
http://inside.mines.edu/~whoff/
1
SIFT
Examples
2
SIFT Software
• Matlab code
– http://www.vlfeat.org
– Download and put in a directory (such as
C:\Users\whoff\Documents\Research\SIFT\vlfeat-0.9.20)
– At the Matlab prompt,
run(‘C:\Users\whoff\Documents\Research\vlfeat0.9.20\toolbox\vl_setup’);
This temporarily adds the folder containing
the vlfeat code, to your Matlab path
• Main functions
– vl_sift – extract SIFT features from an image
– vl_ubcmatch – match two sets of SIFT features
• Also useful
– vl_plotframe – overlay SIFT feature locations on an image
– vl_plotsiftdescriptor – overlay SIFT feature details on an image
3
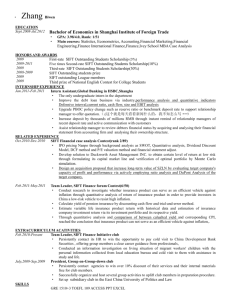
SIFT Feature Detector
• Function call to detect features (and compute descriptors)
[f,d] = vl_sift (I)
•
Returns
– Arrays f(4,N), d(128,N), where N is the number of features
– f(1:4,i) is (x,y,scale,angle) for the ith feature
– d(1:128,i) is the 128-element descriptor for the ith feature
• Try on “graffiti” image dataset; see where features are detected
Images from http://www.cs.unc.edu/~jheinly/feature-evaluation/datasets.html
4
clear all
close all
SIFT Feature
Detector
I1 = imread('img1.png');
imshow(I1, []);
if size(I1,3)>1
I1 = rgb2gray(I1); % If color, convert to grayscale
end
I1 = single(I1); % Convert to single precision floating point
% First make sure the vl_sift code is in the path
if exist('vl_sift', 'file')==0
run('C:\Users\ahwho_000\Documents\Research\vlfeat-0.9.20\toolbox\vl_setup');
end
[f1,d1] = vl_sift(I1);
% Extract SIFT features
% Show the SIFT features
h = vl_plotframe(f1);
set(h,'color','y','linewidth',1);
I2 = imread('img2.png');
figure, imshow(I2, []);
if size(I2,3)>1
I2 = rgb2gray(I2); % If color, convert to grayscale
end
I2 = single(I2); % Convert to single precision floating point
[f2,d2] = vl_sift(I2);
% Extract SIFT features
% Show the SIFT features
h = vl_plotframe(f2);
set(h,'color','y','linewidth',1);
5
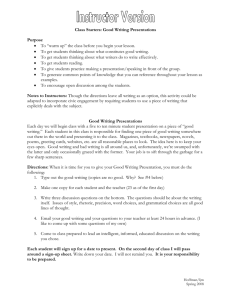
SIFT Descriptor
• Let’s create a synthetic image of a square
clear all
close all
I = zeros(400,400);
I(100:300, 100:300) = 1.0;
I = single(I);
imshow(I,[]);
• Then calculate the descriptor at a specified location (ie, at a corner)
x = 100;
y = 100;
scale = 5;
ang = 0;
% Specify (x;y;scale,angle) of a feature (frame) to extract
fc = [x;y;scale;ang];
[f,d] = vl_sift(I,'frames',fc);
Use this option to extract just one feature
at the specified location, scale, and angle
6
Display SIFT Descriptor
• Function call to display features
vl_plotsiftdescriptor(d,f);
• This shows the gradient directions in the 4x4 cells surrounding each
feature
% Plot it
h = vl_plotsiftdescriptor(d,f);
set(h,'color','g');
disp(f);
% x,y,scale,angle
figure, plot(d);
7
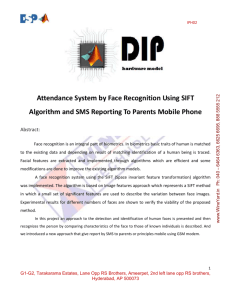
Show raw image gradients
% Show the image at that scale
g = fspecial('gaussian', 6*scale, scale);
Is = imfilter(I,g);
figure, imshow(Is,[]);
[gx,gy] = gradient(Is);
x = 1:size(I,2);
y = 1:size(I,1);
hold on
quiver(x, y, gx, gy);
h = vl_plotsiftdescriptor(d,f);
set(h,'color','g');
clear all
close all
Invariance to rotation, scale
% First make sure the vl_sift code is in the path
if exist('vl_sift', 'file')==0
run('C:\Users\ahwho_000\Documents\Research\vlfeat0.9.20\toolbox\vl_setup');
end
I1 = imread('cameraman.tif');
I1 = single(I1);
imshow(I1,[]);
% Convert to single precision floating point
[f1,d1] = vl_sift(I1);
% Find the feature closest to the center of the image
dx = size(I1,2)/2 - f1(1,:);
dy = size(I1,1)/2 - f1(2,:);
distsq = dx.^2 + dy.^2;
[~,i1] = min(distsq);
% Show the SIFT feature
h = vl_plotframe(f1(:,i1)) ;
set(h,'color','y','linewidth',2) ;
1 of 2
I2 = imresize(I1, 2);
I2 = imrotate(I2, 30);
figure, imshow(I2,[]);
% Resize by a factor of 2
[f2,d2] = vl_sift(I2);
% Find the feature closest to the center of the image
dx = size(I2,2)/2 - f2(1,:);
dy = size(I2,1)/2 - f2(2,:);
distsq = dx.^2 + dy.^2;
[~,i2] = min(distsq);
% Show the SIFT feature
h = vl_plotframe(f2(:,i2)) ;
set(h,'color','y','linewidth',2) ;
disp(f1(:,i1));
disp(f2(:,i2));
% Print (x,y,scale,ang)
% Print (x,y,scale,ang)
figure, plot(d1(:,i1), 'r');
hold on, plot(d2(:,i2), 'g');
2 of 2
Match SIFT features
I1 = imread(‘test000.jpg');
I1 = single(I1); % Convert to single precision floating point
imshow(I1,[]);
% These parameters limit the number of features detected
peak_thresh = 0;
% increase to limit; default is 0
edge_thresh = 10;
% decrease to limit; default is 10
[f1,d1] = vl_sift(I1, ...
'PeakThresh', peak_thresh, ...
'edgethresh', edge_thresh );
fprintf('Number of frames (features) detected: %d\n', size(f1,2));
% Show all SIFT features detected
h = vl_plotframe(f1) ;
set(h,'color','y','linewidth',2) ;
11
Display one feature
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Visualize one feature only
i = randi(size(f1,2));
% pick any feature
fprintf('Feature index %d\n', i);
disp('(x,y,scale,angle): '); disp(f1(:,i));
figure, plot(d1(:,i));
% Display that feature
figure, imshow(I1,[]);
h = vl_plotframe(f1(:,i)) ;
set(h,'color','y','linewidth',2) ;
h = vl_plotsiftdescriptor(d1(:,i),f1(:,i)) ;
set(h,'color','g') ;
12
Extract SIFT features – 2nd image
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Second image
I2 = single( imread('test012.jpg') );
figure, imshow(I2,[]);
% These parameters limit the number of features detected
peak_thresh = 0;
% increase to limit; default is 0
edge_thresh = 10;
% decrease to limit; default is 10
[f2,d2] = vl_sift(I2, ...
'PeakThresh', peak_thresh, ...
'edgethresh', edge_thresh );
fprintf('Number of frames (features) detected: %d\n', size(f2,2));
% Show all SIFT features detected
h
= vl_plotframe(f2) ;
set(h,'color','y','linewidth',2) ;
13
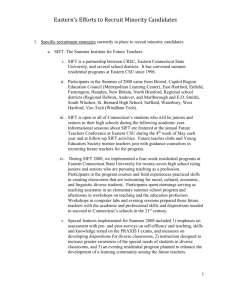
Match SIFT features
•
Function call
[matches, scores] = vl_ubcmatch(d1, d2);
•
Returns
– Arrays: matches(2,M), scores(M), where M is the number of matches
– matches(1:2,i) are the indices of the features for the ith match
– scores(i) is the squared Euclidean distance between the features
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Threshold for matching
% Descriptor D1 is matched to a descriptor D2 only if the distance d(D1,D2)
% multiplied by THRESH is not greater than the distance of D1 to all other
% descriptors
thresh = 2.0;
% default = 1.5; increase to limit matches
[matches, scores] = vl_ubcmatch(d1, d2, thresh);
fprintf('Number of matching frames (features): %d\n', size(matches,2));
indices1 = matches(1,:);
f1match = f1(:,indices1);
d1match = d1(:,indices1);
% Get matching features
indices2 = matches(2,:);
f2match = f2(:,indices2);
d2match = d2(:,indices2);
14
Display matches
• These are potential matches, based on similarity of local appearance
• Some may be incorrect
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%
% Show matches
figure, imshow([I1,I2],[]);
o = size(I1,2) ;
line([f1match(1,:);f2match(1,:)+o], ...
[f1match(2,:);f2match(2,:)]) ;
for i=1:size(f1match,2)
x = f1match(1,i);
y = f1match(2,i);
text(x,y,sprintf('%d',i), 'Color', 'r');
end
for i=1:size(f2match,2)
x = f2match(1,i);
y = f2match(2,i);
text(x+o,y,sprintf('%d',i), 'Color', 'r');
end
15