CSCI498B/598B Human-Centered Robotics Nov 03, 2014
advertisement

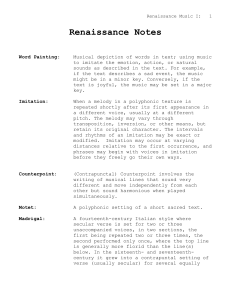
CSCI498B/598B Human-Centered Robotics Nov 03, 2014 Slides of LfD are adapted from Dr. Aude G. Billard Gesture Recognition Biological Inspiration Robotic Learning by Imitation Implementation Motor Learning Gesture Recognition Robotic Learning by Imitation Implementation Motor Learning The Transfer Problem Imitator Demonstrator , , 1 2 4 , , 5 6 ? 3 7 , , 1 3 4 x x1 , x2 , x3 , , 5 6 7 x x1, x2 , x3 What to imitate? x x d d v v Same target location Same direction of motion Same speed, same force Same posture , , , , 1 2 1 3 4 , , 5 6 7 v x x1 , x2 , x3 d 2 3 x x1, x2 , x3 d 4 , , 5 6 7 v How to Imitate? The correspondence problem Demonstration Imitation ? No solutions Find the closest solution according to a metric Imitation Learning Following – an imitation mechanism • While following the teacher, the learner robot learns to Gesture Recognition associate a word with a meaning in terms of sensory inputs Robotic Learning by Imitation Implementation • Billard et al, ESANN’1997, • Billard & Dautenhahn, Robotics & Autonomous Systems 1998, • Billard & Hayes, 99,00 Imitation Learning Following – an imitation mechanism Gesture Recognition •Teaching path in a Maze Demiris & Hayes, 1994, 1996; Robotic Learning by Imitation Implementation • Teaching how to climb a hill Dautenhahn, Robotics & Autonomous Systems, 1995 • Teaching a path in the environment Billard & Hayes, Adaptive Behavior, 1999 Moga, Gaussier, Applied Artificial Intelligence, 2000 Kaiser et al, Robotics & Autonomous Systems, 2002 Nicolescu & Mataric, AGENTS’ 2003 Imitation Learning One-Shot Learning Methods • Segmentation of demonstration into primitives Gesture Recognition • Classification of gestures into predefined states (e.g. grasp, collision) • Built-in controller for producing sequences of states Robotic Learning by Imitation Implementation • Kuniyoshi et al. IEEE Trans. on Robotics and Automation,1994. • Dillmann et al, Robotics & Autonomous Systems, 2001. • Ritter et al, Rev Neuroscience, 2003 • Aleotti et al, Robotics & Autonomous Systems, 2004. Robot Programming by Demonstration One-Shot Learning Methods Sensors: Data Gloves, Fixed cameras, Speech processing Actuators: Mobile robot, 7 DOF arm, 2 fingers Gripper R. Dillmann, Robotics & Autonomous Systems 47:2-3, 109-116, 2004 Imitation Learning One-Shot Learning Methods Explicit teaching/learning: - Reasoning about tasks - Verbal instructions Gesture Recognition Gesture Recognition: For each sensor a context-dependent Learning model based on background knowledgeby is provided: ‘opening the refrigerator door’, ‘extracting the bottle’ and ‘closing the door’ Task Reproduction: Store action sequences in a tree-like structure of macro-operators R. Dillmann, Robotics & Autonomous Systems 47:2-3, 109-116 2004 Robotic Imitation Implementation Imitation Learning Robot Programming by Demonstration: Grasping Gesture Recognition Because of the large range of possible shapes, generalizing pre-programmed grasps to new and general objects is a rather hard task: Robotic Learning by Imitation Implementation • Orientation of the hand • Positioning of the fingers (correspondence problem!) • Tactile forces, stable object contact Steil et al, Robotics & Autonomous Systems 47:2-3, 129-141, 2004 Imitation Learning Robot Programming by Demonstration: Grasping Gesture Recognition (i) a ‘naïve’ imitation strategy, in which the observed joint angle trajectories (after their transformation into the three-finger geometry) were directly applied to control the fingers of the hand duringLearning the grasp, until complete closure around the object Robotic by Imitation Implementation (ii) a strategy in which the visually observed hand posture is matched to the initial conditions of a power grip, a precision grip, a three-finger and two-finger grip, respectively, in order to identify the grip type. Steil et al, Robotics & Autonomous Systems 47:2-3, 129-141, 2004 Robot Programming by Demonstration Other related works are, e.g.: • • • Kuniyoshi et al, ICRA, 1994 Aleotti et al, Robotics & Autonomous Systems, 47:2-3, 153-167, 2004 Zhang & Roessler, Robotics & Autonomous Systems 47:2-3, 117-127, 2004 Imitation Learning Learning of Dynamical Systems • Learning the optimal controller Gesture • Model of physical system • Reinforcement learning Recognition Robotic Learning by Imitation Implementation • Atkeson & Schaal, ICML, 1997. Imitation Learning Learning of Dynamical Systems • Learning primitives of the system Gesture Recognition Robotic Learning by Imitation Implementation •Ijspeert, Nakanishi, Schaal, ICRA’01, NIPS’02 Imitation Learning Learning of Dynamical Systems •Learning primitives of the system Gesture Recognition Robotic Learning by Imitation Implementation •Ijspeert, Nakanishi, Schaal, ICRA’01, NIPS’02 Imitation Learning Learning of Dynamical Systems The learned trajectory is not sufficient to control the Gesture Recognition actual robot’s walking pattern. Phase resetting using foot contact information is necessary. on-line adjustment using sensory feedback from the environment is essential to achieve successful Learning by Imitation locomotion Nakanishi et al, Robotics & Autonomous Systems, 47:2-3, 79-91, 2004. Robotic Implementation Imitation Learning in Robots Granularity Cognition How to imitate? Level 3: Learning primitives of motion Level 2: Reproduction of trajectories Level 1: One-shot learning Level 0: Implicit imitation 20 21