Document 13421187
advertisement

Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
On Nonlinear Optimal Control Problems
with an L1 Norm
Eduardo Casas
Roland Herzog
University of Cantabria
Gerd Wachsmuth
Numerical Mathematics
Workshop on Inverse Problems and Optimal Control for PDEs
Warwick, May 23–27, 2011
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
1 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Overview
1
Introduction and Problem Setting
2
1st- and 2nd-Order Optimality Conditions
3
Finite Element Error Estimates and Examples
4
Extension: Directional Sparsity
(joint with Georg Stadler, ICES, Texas)
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
2 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Problem Setting for this Talk
Control problem
Minimize
such that
1
ν
ky − yd k2L2 (Ω) + kuk2L2 (Ω) + µ kukL1 (Ω)
2
2
(ua < 0 < ub )
ua ≤ u ≤ ub
and y solves the PDE
Semilinear partial differential equation
Roland Herzog (TU Chemnitz)
−∆y + a(·, y ) = u
in Ω
y =0
on Γ
Sparsity in Nonlinear Optimal Control
Warwick
3 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Why Consider kukL1 (Ω) ?
The L1 -norm
Z
kukL1 (Ω) =
|u(x)| dx
Ω
is often a natural measure of the true control cost.
It also has the effect of promoting sparse controls.
[Vossen, Maurer (2006); Stadler (2009); Clason, Kunisch (2011)]
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
4 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Why Consider kukL1 (Ω) ?
The L1 -norm
Z
kukL1 (Ω) =
|u(x)| dx
Ω
is often a natural measure of the true control cost.
It also has the effect of promoting sparse controls.
Applications in control:
actuator placement
on/off control structure desired
true measure of control cost
Other applications using the 1-norm:
compressed sensing
TV-based image restoration
[Vossen, Maurer (2006); Stadler (2009); Clason, Kunisch (2011)]
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
4 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
A First Glance at Sparsity
µ=0
Roland Herzog (TU Chemnitz)
µ>0
Sparsity in Nonlinear Optimal Control
Warwick
5 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
A First Glance at Sparsity
Smooth minimization problem
minimize
1
2
2 kxk2
s.t.
Ax = b
Histogram (solution components’ sizes)
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
6 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
A First Glance at Sparsity
Smooth minimization problem
minimize
1
2
2 kxk2
s.t.
Ax = b
Convex minimization problem
minimize
kxk1
s.t.
Ax = b
Histogram (solution components’ sizes)
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
6 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
A First Glance at Sparsity
Smooth minimization problem
minimize
1
2
2 kxk2
s.t.
Ax = b
Convex minimization problem
minimize
kxk1
x + A> p = 0
λ + A> p = 0,
Ax − b = 0
Ax − b = 0
s.t.
Ax = b
λ ∈ ∂kxk1
λi = −1
if xi < 0
λi = +1
if xi > 0
λi ∈ [−1, 1] if xi = 0
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
6 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
A First Glance at Sparsity
Smooth minimization problem
minimize
1
2
2 kxk2
s.t.
Ax = b
Convex minimization problem
minimize
kxk1
x + A> p = 0
λ + A> p = 0,
Ax − b = 0
Ax − b = 0
s.t.
Ax = b
λ ∈ ∂kxk1
λi = −1
if xi < 0
λi = +1
if xi > 0
λi ∈ [−1, 1] if xi = 0
xi = max{0, xi + c (λi − 1)}
+ min{0, xi + c (λi + 1)}
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
6 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Problem Setting for this Talk
Control problem
Minimize
such that
1
ν
ky − yd k2L2 (Ω) + kuk2L2 (Ω) + µ kukL1 (Ω)
2
2
(ua < 0 < ub )
ua ≤ u ≤ ub
and y solves the PDE
Semilinear partial differential equation
Roland Herzog (TU Chemnitz)
−∆y + a(·, y ) = u
in Ω
y =0
on Γ
Sparsity in Nonlinear Optimal Control
Warwick
7 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Basic Assumptions Concerning the PDE
Semilinear partial differential equation
− ∆y + a(·, y ) = u
in Ω
y =0
on Γ
Assumptions
Ω ⊂ Rn , n ∈ {2, 3}, with C 1,1 -boundary or convex, polygonal set
a is Carathéodory-function, monotone, C 2 w.r.t. y
Properties
For u ∈ Lp (Ω), n/2 < p ≤ 2 the solution y = G (u) ∈ W 2,p (Ω)
G : Lp (Ω) → W 2,p (Ω) is C 2 , derivatives by linearization
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
8 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Basic Assumptions Concerning the PDE
Semilinear partial differential equation
− div(A ∇y ) + a(·, y ) = u
in Ω
y =0
on Γ
Assumptions
Ω ⊂ Rn , n ∈ {2, 3}, with C 1,1 -boundary or convex, polygonal set
a is Carathéodory-function, monotone, C 2 w.r.t. y
ξ > A(x) ξ ≥ a kξk2 for all ξ ∈ Rn , a > 0
Properties
For u ∈ Lp (Ω), n/2 < p ≤ 2 the solution y = G (u) ∈ W 2,p (Ω)
G : Lp (Ω) → W 2,p (Ω) is C 2 , derivatives by linearization
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
8 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Overview
1
Introduction and Problem Setting
2
1st- and 2nd-Order Optimality Conditions
3
Finite Element Error Estimates and Examples
4
Extension: Directional Sparsity
(joint with Georg Stadler, ICES, Texas)
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
9 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Problem Setting
Control problem
Minimize
such that
1
ν
ky
− yd k2L2 (Ω) + kuk2L2 (Ω) + µ kukL1 (Ω)
2
2
(ua < 0 < ub )
ua ≤ u ≤ ub
and y solves the PDE
Semilinear partial differential equation
Roland Herzog (TU Chemnitz)
− div(A ∇y ) + a(·, y ) = u
in Ω
y =0
on Γ
Sparsity in Nonlinear Optimal Control
Warwick
10 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Problem Setting
Control problem
Minimize
such that
Roland Herzog (TU Chemnitz)
1
ν
kG (u) − yd k2L2 (Ω) + kuk2L2 (Ω) + µ kukL1 (Ω)
2
2
(ua < 0 < ub )
ua ≤ u ≤ ub
Sparsity in Nonlinear Optimal Control
Warwick
10 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Problem Setting
Control problem
Minimize
such that
1
ν
kG (u) − yd k2L2 (Ω) + kuk2L2 (Ω) + µ kukL1 (Ω)
2
2
(ua < 0 < ub )
ua ≤ u ≤ ub
Properties
is differentiable w.r.t. u ∈ L2 (Ω)
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
10 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Problem Setting
Control problem
Minimize
such that
1
ν
kG (u) − yd k2L2 (Ω) + kuk2L2 (Ω) + µ kukL1 (Ω)
2
2
(ua < 0 < ub )
ua ≤ u ≤ ub
Properties
is differentiable w.r.t. u ∈ L2 (Ω)
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
10 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Problem Setting
Control problem
Minimize
such that
1
ν
kG (u) − yd k2L2 (Ω) + kuk2L2 (Ω) + µ kukL1 (Ω)
2
2
(ua < 0 < ub )
ua ≤ u ≤ ub
Properties
is differentiable w.r.t. u ∈ L2 (Ω)
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
10 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Problem Setting
Control problem
Minimize
such that
1
ν
kG (u) − yd k2L2 (Ω) + kuk2L2 (Ω) + µ kukL1 (Ω)
2
2
(ua < 0 < ub )
ua ≤ u ≤ ub
Properties
is differentiable w.r.t. u ∈ L2 (Ω)
is convex w.r.t. u
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
10 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Problem Setting
Control problem
Minimize
such that
1
ν
kG (u) − yd k2L2 (Ω) + kuk2L2 (Ω) + µ kukL1 (Ω)
2
2
ua ≤ u ≤ ub
f(u)
j(u)
Properties
is differentiable w.r.t. u ∈ L2 (Ω)
is convex w.r.t. u
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
10 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Sums of Differentiable and Convex Function
Definition of a generalized subdifferential
Let f be differentiable and j convex, J = f + j. The generalized
subdifferential ∂J(x) is defined as
∂J(x) = ∇f (x) + ∂j(x)
This coincides with known generalized derivatives (e.g. Fréchet,
Clarke) on this class of functions.
This ensures the uniqueness, i.e. ∂J does not depend on the splitting
of J into f and j.
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
11 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Sums of Differentiable and Convex Function
Definition of a generalized subdifferential
Let f be differentiable and j convex, J = f + j. The generalized
subdifferential ∂J(x) is defined as
∂J(x) = ∇f (x) + ∂j(x)
Necessary optimality condition of first order
0 ∈ ∂J(x) = ∇f (x) + ∂j(x)
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
11 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
First-Order Necessary Condition
1
ν
f (u) = kG (u) − yd k2L2 (Ω) + kuk2L2 (Ω) ,
2
2
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
j(u) = kukL1 (Ω)
Warwick
12 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
First-Order Necessary Condition
1
ν
f (u) = kG (u) − yd k2L2 (Ω) + kuk2L2 (Ω) ,
j(u) = kukL1 (Ω)
2
2
∇f (u) = G 0 (u)? (y − yd ) +ν u, where y = G (u)
|
{z
}
adjoint state p
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
12 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
First-Order Necessary Condition
1
ν
f (u) = kG (u) − yd k2L2 (Ω) + kuk2L2 (Ω) ,
j(u) = kukL1 (Ω)
2
2
∇f (u) = G 0 (u)? (y − yd ) +ν u, where y = G (u)
|
{z
}
adjoint state p
First-order necessary optimality conditions
0 ∈ ∇f (u) + µ ∂j(u)
⇔
Roland Herzog (TU Chemnitz)
0 = ∇f (u) + µ λ,
λ ∈ ∂j(u)
Sparsity in Nonlinear Optimal Control
Warwick
12 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
First-Order Necessary Condition
1
ν
f (u) = kG (u) − yd k2L2 (Ω) + kuk2L2 (Ω) ,
j(u) = kukL1 (Ω)
2
2
∇f (u) = G 0 (u)? (y − yd ) +ν u, where y = G (u)
|
{z
}
adjoint state p
First-order necessary optimality conditions
0 ∈ ∇f (u) + µ ∂j(u)
⇔
0 = ∇f (u) + µ λ,
λ ∈ ∂j(u)
. . . with convex control constraints: Uad = {u ∈ L2 (Ω) : ua ≤ u ≤ ub }
0 ≤ h∇f (u) + µ λ, u − uiL2 (Ω)
Roland Herzog (TU Chemnitz)
for all u ∈ Uad ,
Sparsity in Nonlinear Optimal Control
λ ∈ ∂j(u)
Warwick
12 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
First-Order Necessary Condition
1
ν
f (u) = kG (u) − yd k2L2 (Ω) + kuk2L2 (Ω) ,
j(u) = kukL1 (Ω)
2
2
∇f (u) = G 0 (u)? (y − yd ) +ν u, where y = G (u)
|
{z
}
adjoint state p
First-order necessary optimality conditions
0 ∈ ∇f (u) + µ ∂j(u)
⇔
0 = ∇f (u) + µ λ,
λ ∈ ∂j(u)
. . . with convex control constraints: Uad = {u ∈ L2 (Ω) : ua ≤ u ≤ ub }
0 ≤ h∇f (u) + µ λ, u − uiL2 (Ω)
Roland Herzog (TU Chemnitz)
for all u ∈ Uad ,
Sparsity in Nonlinear Optimal Control
λ ∈ ∂j(u)
Warwick
12 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
First-Order Necessary Condition
Theorem
Let u be a local min. with state y = G (u). Then there exist an adjoint
state p = G 0 (u)? (y − yd ) and a subgradient λ ∈ ∂j(u) = ∂kukL1 (Ω) s.t.
hp + ν u + µ λ, u − uiL2 (Ω) ≥ 0
Roland Herzog (TU Chemnitz)
for all u ∈ Uad .
Sparsity in Nonlinear Optimal Control
Warwick
13 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
First-Order Necessary Condition
Theorem
Let u be a local min. with state y = G (u). Then there exist an adjoint
state p = G 0 (u)? (y − yd ) and a subgradient λ ∈ ∂j(u) = ∂kukL1 (Ω) s.t.
hp + ν u + µ λ, u − uiL2 (Ω) ≥ 0
for all u ∈ Uad .
Subgradient of the L1 norm
where u(x) > 0
= +1
λ(x) ∈ [−1, 1] where u(x) = 0
= −1
where u(x) < 0
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
13 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
First-Order Necessary Condition
Theorem
Let u be a local min. with state y = G (u). Then there exist an adjoint
state p = G 0 (u)? (y − yd ) and a subgradient λ ∈ ∂j(u) = ∂kukL1 (Ω) s.t.
hp + ν u + µ λ, u − uiL2 (Ω) ≥ 0
for all u ∈ Uad .
Adjoint equation
− div(A> ∇p) +
Roland Herzog (TU Chemnitz)
∂a
(·, y ) p = y − yd
∂y
p=0
Sparsity in Nonlinear Optimal Control
in Ω
on Γ
Warwick
13 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
First-Order Necessary Condition
Theorem
Let u be a local min. with state y = G (u). Then there exist an adjoint
state p = G 0 (u)? (y − yd ) and a subgradient λ ∈ ∂j(u) = ∂kukL1 (Ω) s.t.
hp + ν u + µ λ, u − uiL2 (Ω) ≥ 0
for all u ∈ Uad .
Corollary: projection formulas
1
− p(x) + µ λ(x)
ν
1
λ(x) = proj[−1,+1] − p(x)
µ
u(x) = 0 ⇐⇒ |p(x)| ≤ µ
u(x) = proj[ua ,ub ]
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
13 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
First-Order Necessary Condition
Theorem
Let u be a local min. with state y = G (u). Then there exist an adjoint
state p = G 0 (u)? (y − yd ) and a subgradient λ ∈ ∂j(u) = ∂kukL1 (Ω) s.t.
hp + ν u + µ λ, u − uiL2 (Ω) ≥ 0
for all u ∈ Uad .
Corollary: projection formulas
1
− p(x) + µ λ(x)
ν
1
λ(x) = proj[−1,+1] − p(x)
µ
u(x) = 0 ⇐⇒ |p(x)| ≤ µ
u(x) = proj[ua ,ub ]
It follows that u, λ ∈ C 0,1 (Ω) = W 1,∞ (Ω).
Moreover, λ ∈ ∂kukL1 (Ω) is unique.
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
13 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Second-Order Optimality Conditions
Critical cone at stationary point u with associated λ ∈ ∂j(u)
Cu+ := v ∈ L2 (Ω) : f 0 (u) v + µ hλ, v i = 0
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
14 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Second-Order Optimality Conditions
Critical cone at stationary point u with associated λ ∈ ∂j(u)
Cu+ := v ∈ L2 (Ω) : f 0 (u) v + µ hλ, v i = 0
hf 00 (u) v , v i > 0
Roland Herzog (TU Chemnitz)
for all v ∈ Cu+ \ {0}
⇒
Sparsity in Nonlinear Optimal Control
u is locally optimal
Warwick
14 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Second-Order Optimality Conditions
Critical cone at stationary point u with associated λ ∈ ∂j(u)
Cu+ := v ∈ L2 (Ω) : f 0 (u) v + µ hλ, v i = 0
hf 00 (u) v , v i > 0
00
hf (u) v , v i ≥ 0
Roland Herzog (TU Chemnitz)
for all v ∈ Cu+ \ {0}
for all v ∈
Cu+
⇒
u is locally optimal
6⇐
u is locally optimal
Sparsity in Nonlinear Optimal Control
Warwick
14 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Second-Order Optimality Conditions
Critical cone at stationary point u with associated λ ∈ ∂j(u)
Cu+ := v ∈ L2 (Ω) : f 0 (u) v + µ hλ, v i = 0
hf 00 (u) v , v i > 0
00
hf (u) v , v i ≥ 0
Roland Herzog (TU Chemnitz)
for all v ∈ Cu+ \ {0}
for all v ∈
Cu+
too large
⇒
u is locally optimal
6⇐
u is locally optimal
Sparsity in Nonlinear Optimal Control
Warwick
14 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Second-Order Optimality Conditions
Critical cone at stationary point u with associated λ ∈ ∂j(u)
too large
Cu+ := v ∈ L2 (Ω) : f 0 (u) v + µ hλ, v i = 0
2
0
0
Cu := v ∈ L (Ω) : f (u) v + µ j (u; v ) = 0 correct
hf 00 (u) v , v i > 0
00
hf (u) v , v i ≥ 0
Roland Herzog (TU Chemnitz)
for all v ∈ Cu \ {0}
⇒
u is locally optimal
for all v ∈ Cu
⇐
u is locally optimal
Sparsity in Nonlinear Optimal Control
Warwick
14 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Second-Order Optimality Conditions
Critical cone at stationary point u with associated λ ∈ ∂j(u)
too large
Cu+ := v ∈ L2 (Ω) : f 0 (u) v + µ hλ, v i = 0
2
0
0
Cu := v ∈ L (Ω) : f (u) v + µ j (u; v ) = 0 correct
hf 00 (u) v , v i > 0
00
hf (u) v , v i ≥ 0
for all v ∈ Cu \ {0}
⇒
u is locally optimal
for all v ∈ Cu
⇐
u is locally optimal
. . . with control constraints
Cu := v ∈ L2 (Ω) :f 0 (u) v + µ j 0 (u; v ) = 0
v ≥ 0 where u = ua
v ≤ 0 where u = ub
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
)
v ∈ TUad (u)
Warwick
14 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Second-Order Sufficient Conditions
Critical cone (closed, convex)
Cu := {v ∈ TUad (u) : f 0 (u) v + µ j 0 (u; v ) = 0}
Theorem
Let u ∈ Uad and λ ∈ ∂j(u) satisfy the first order necessary condition.
Assume hf 00 (u) v , v i > 0 holds for all v ∈ Cu \ {0}. Then there exist
δ > 0, ε > 0 such that
δ
2
J(u) + ku − uk2L2 (Ω) ≤ J(u) for all u ∈ Uad ∩ BεL (u).
2
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
15 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Second-Order Sufficient Conditions
Critical cone (closed, convex)
Cu := {v ∈ TUad (u) : f 0 (u) v + µ j 0 (u; v ) = 0}
Theorem
Let u ∈ Uad and λ ∈ ∂j(u) satisfy the first order necessary condition.
Assume hf 00 (u) v , v i > 0 holds for all v ∈ Cu \ {0}. Then there exist
δ > 0, ε > 0 such that
δ
2
J(u) + ku − uk2L2 (Ω) ≤ J(u) for all u ∈ Uad ∩ BεL (u).
2
Corollary
There exist τ > 0, δ2 > 0 such that hf 00 (u) v , v i ≥ δ2 kv k2L2 (Ω) for all
v ∈ Cuτ = {v ∈ TUad (u) : f 0 (u) v + µ j 0 (u; v ) ≤ τ kv kL2 (Ω) }
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
15 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Overview
1
Introduction and Problem Setting
2
1st- and 2nd-Order Optimality Conditions
3
Finite Element Error Estimates and Examples
4
Extension: Directional Sparsity
(joint with Georg Stadler, ICES, Texas)
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
16 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Finite Element Approximation
Regular triangulation {Th } of Ω, Ωh = ∪T ∈Th T .
Discrete space of (adjoint) states (piecewise linear):
Yh = {yh ∈ C (Ω) : yh|T ∈ P1 for all T ∈ Th , and yh = 0 on Ω \ Ωh }
Discrete PDE:
Z
Z
∇zh> A ∇yh + a(·, yh ) dx =
Ωh
u zh dx
for all zh ∈ Yh
Ωh
Discrete space of controls (piecewise constant):
Uh = {uh ∈ L2 (Ωh ) : uh|T ≡ const for all T ∈ Th }
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
17 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Discrete Problem
Discrete optimization problem
Minimize
such that
1
ν
kGh (uh ) − yd k2L2 (Ω) + kuh k2L2 (Ω) + µ kuh kL1 (Ω)
2
2
ua ≤ uh ≤ ub
and uh ∈ Uh
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
18 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Convergence of Minimizers
Theorem (approximation of global minima)
For every h > 0 let u h be a global solution of the discrete problem. Then
the sequence {u h }h>0 is bounded in L∞ (Ω) and there exist subsequences,
denoted in the same way, converging to a point u in the weak? L∞ (Ω)
topology. Any of these limit points is a global solution of the continuous
problem. Moreover, we have
lim ku − u h kL∞ (Ωh ) = 0 and
lim Jh (u h ) = J(u).
h→0
Roland Herzog (TU Chemnitz)
h→0
Sparsity in Nonlinear Optimal Control
Warwick
19 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Convergence of Minimizers
Theorem (approximation of global minima)
For every h > 0 let u h be a global solution of the discrete problem. Then
the sequence {u h }h>0 is bounded in L∞ (Ω) and there exist subsequences,
denoted in the same way, converging to a point u in the weak? L∞ (Ω)
topology. Any of these limit points is a global solution of the continuous
problem. Moreover, we have
lim ku − u h kL∞ (Ωh ) = 0 and
lim Jh (u h ) = J(u).
h→0
h→0
Theorem (approximation of strict local minima)
Let u be a strict local minimum of the continuous problem, then there
exists a sequence {u h }h>0 of local minima of the discrete problems which
converge towards u.
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
19 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Error Estimates
Theorem (piecewise constant discretization)
Let u be a solution of the continuous problem and {u h } a sequence of
solutions of the discrete problems converging towards u. Moreover, assume
that the second-order sufficient condition is satisfied.
Then there exists C > 0 such that
ku − u h kL∞ (Ωh ) + ky − y h kL∞ (Ωh ) + kp − p h kL∞ (Ωh ) + kλ − λh kL∞ (Ωh ) ≤ C h.
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
20 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Error Estimates
Theorem (piecewise constant discretization)
Let u be a solution of the continuous problem and {u h } a sequence of
solutions of the discrete problems converging towards u. Moreover, assume
that the second-order sufficient condition is satisfied.
Then there exists C > 0 such that
ku − u h kL∞ (Ωh ) + ky − y h kL∞ (Ωh ) + kp − p h kL∞ (Ωh ) + kλ − λh kL∞ (Ωh ) ≤ C h.
Idea of the proof
Extend u h to Ω \ Ωh by u. We obtain by optimality
Z
0
f (u)(u h − u) + µ
λ (u h − u ) dx ≥ 0
ZΩ
λh (uh − u h ) dx ≥ 0 for all uh ∈ Uh ∩ Uad
fh0 (u h )(uh − u h ) + µ
Ω
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
20 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Error Estimates
Theorem (piecewise constant discretization)
Let u be a solution of the continuous problem and {u h } a sequence of
solutions of the discrete problems converging towards u. Moreover, assume
that the second-order sufficient condition is satisfied.
Then there exists C > 0 such that
ku − u h kL∞ (Ωh ) + ky − y h kL∞ (Ωh ) + kp − p h kL∞ (Ωh ) + kλ − λh kL∞ (Ωh ) ≤ C h.
Idea of the proof
≤ f 0 (u h ) − f 0 (u) (u h − u) ≤ . . .
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
20 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Error Estimates
Theorem (piecewise constant discretization)
Let u be a solution of the continuous problem and {u h } a sequence of
solutions of the discrete problems converging towards u. Moreover, assume
that the second-order sufficient condition is satisfied.
Then there exists C > 0 such that
ku − u h kL∞ (Ωh ) + ky − y h kL∞ (Ωh ) + kp − p h kL∞ (Ωh ) + kλ − λh kL∞ (Ωh ) ≤ C h.
Idea of the proof
δ
ku h − uk2L2 (Ω) ≤ f 0 (u h ) − f 0 (u) (u h − u) ≤ . . .
2
since u h − u ∈ Cuτ and SSC hold
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
20 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Error Estimates
Theorem (piecewise constant discretization)
Let u be a solution of the continuous problem and {u h } a sequence of
solutions of the discrete problems converging towards u. Moreover, assume
that the second-order sufficient condition is satisfied.
Then there exists C > 0 such that
ku − u h kL∞ (Ωh ) + ky − y h kL∞ (Ωh ) + kp − p h kL∞ (Ωh ) + kλ − λh kL∞ (Ωh ) ≤ C h.
Theorem (variational discretization, Hinze (2005))
Let u be a solution of the continuous problem and {u h } a sequence of
solutions of the variational discretized probem, converging towards u.
Moreover, assume that the second-order sufficient condition is satisfied.
Then there is C > 0, such that
ku − u h kL2 (Ωh ) + ky − y h kL2 (Ωh ) + kp − p h kL2 (Ωh ) + kλ − λh kL2 (Ωh ) ≤ C h2 .
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
20 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Test Problem
Control problem
Minimize
such that
1
ky − yd k2L2 (Ω) + 10−3 kuk2L2 (Ω) + 3 · 10−2 kukL1 (Ω)
2
ua ≤ u ≤ ub
yd (x1 , x2 ) = 2 sin(2 π x1 ) sin(π x2 ) exp(x1 )
PDE:
Roland Herzog (TU Chemnitz)
−∆y + y 3 = u
in Ω
y =0
on Γ
Sparsity in Nonlinear Optimal Control
Warwick
21 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Solutions for h = 2−3 and h = 2−8
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
22 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Convergence (Full Discretization)
Error in the control:
Unit circle
1
10
0
10
L2 error
order 1
−1
10
−2
10
Roland Herzog (TU Chemnitz)
−1
10
Sparsity in Nonlinear
meshOptimal
size Control
0
10
Warwick
23 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Convergence (Variational Discretization)
Error in the adjoint:
Unit circle
−1
10
−2
10
−3
10
−4
10
L2 error
order 2
−5
10
−2
10
Roland Herzog (TU Chemnitz)
−1
10
Sparsity in Nonlinear Optimal Control
0
10
Warwick
24 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Influence of Parameter µ
Minimize
such that
1
ν
kG (u) − yd k2L2 (Ω) + kuk2L2 (Ω) + µ kukL1 (Ω)
2
2
ua ≤ u ≤ ub
(ua < 0 < ub )
µ = 0.00
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
25 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Influence of Parameter µ
Minimize
such that
1
ν
kG (u) − yd k2L2 (Ω) + kuk2L2 (Ω) + µ kukL1 (Ω)
2
2
ua ≤ u ≤ ub
(ua < 0 < ub )
µ = 1.00E–03
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
25 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Influence of Parameter µ
Minimize
such that
1
ν
kG (u) − yd k2L2 (Ω) + kuk2L2 (Ω) + µ kukL1 (Ω)
2
2
ua ≤ u ≤ ub
(ua < 0 < ub )
µ = 2.00E–03
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
25 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Influence of Parameter µ
Minimize
such that
1
ν
kG (u) − yd k2L2 (Ω) + kuk2L2 (Ω) + µ kukL1 (Ω)
2
2
ua ≤ u ≤ ub
(ua < 0 < ub )
µ = 4.00E–03
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
25 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Influence of Parameter µ
Minimize
such that
1
ν
kG (u) − yd k2L2 (Ω) + kuk2L2 (Ω) + µ kukL1 (Ω)
2
2
ua ≤ u ≤ ub
(ua < 0 < ub )
µ = 8.00E–03
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
25 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Influence of Parameter µ
Minimize
such that
1
ν
kG (u) − yd k2L2 (Ω) + kuk2L2 (Ω) + µ kukL1 (Ω)
2
2
ua ≤ u ≤ ub
(ua < 0 < ub )
µ = 1.60E–02
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
25 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Influence of Parameter µ
Minimize
such that
1
ν
kG (u) − yd k2L2 (Ω) + kuk2L2 (Ω) + µ kukL1 (Ω)
2
2
ua ≤ u ≤ ub
(ua < 0 < ub )
µ = 3.20E–02
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
25 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Influence of Parameter µ
Minimize
such that
1
ν
kG (u) − yd k2L2 (Ω) + kuk2L2 (Ω) + µ kukL1 (Ω)
2
2
ua ≤ u ≤ ub
(ua < 0 < ub )
µ = 6.40E–02
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
25 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Influence of Parameter µ
Minimize
such that
1
ν
kG (u) − yd k2L2 (Ω) + kuk2L2 (Ω) + µ kukL1 (Ω)
2
2
ua ≤ u ≤ ub
(ua < 0 < ub )
µ = 1.28E–01
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
25 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Overview
1
Introduction and Problem Setting
2
1st- and 2nd-Order Optimality Conditions
3
Finite Element Error Estimates and Examples
4
Extension: Directional Sparsity
(joint with Georg Stadler, ICES, Texas)
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
26 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Can we do Better Than Just Sparse?
Sparsity
Objective function
1
2 ky
− yd k2L2 + β kukL1
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
27 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Can we do Better Than Just Sparse?
Sparsity vs. directional sparsity
Objective function
1
2 ky
Objective function
− yd k2L2 + β kukL1
Roland Herzog (TU Chemnitz)
1
2 ky
− yd k2L2 + β kukL1 (L2 )
Sparsity in Nonlinear Optimal Control
Warwick
27 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Can we do Better Than Just Sparse?
Sparsity vs. directional sparsity
Properties
no structural assumptions
made
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
27 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Can we do Better Than Just Sparse?
Sparsity vs. directional sparsity
Properties
Properties
no structural assumptions
made
Roland Herzog (TU Chemnitz)
exploits known or desired
group sparsity structure
Sparsity in Nonlinear Optimal Control
Warwick
27 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Directional Sparsity with Parabolic PDEs
Placement of actuators for a parabolic problem
Time t
Ω
0
Roland Herzog (TU Chemnitz)
Space x
Sparsity in Nonlinear Optimal Control
Warwick
28 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Directional Sparsity with Parabolic PDEs
With Sparsity functional
Time t
u 6= 0
0
Roland Herzog (TU Chemnitz)
Space x
Sparsity in Nonlinear Optimal Control
Warwick
28 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Directional Sparsity with Parabolic PDEs
With Sparsity functional
Time t
u 6= 0
0
Roland Herzog (TU Chemnitz)
Location of actuators
Sparsity in Nonlinear Optimal Control
Space x
Warwick
28 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Directional Sparsity with Parabolic PDEs
With Sparsity functional
Time t
u 6= 0
wasted
0
Roland Herzog (TU Chemnitz)
Location of actuators
Sparsity in Nonlinear Optimal Control
Space x
Warwick
28 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Directional Sparsity with Parabolic PDEs
With Directional Sparsity functional
Time t
u 6= 0
u 6= 0
0
Roland Herzog (TU Chemnitz)
Space x
Sparsity in Nonlinear Optimal Control
Warwick
28 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Directional Sparsity with Parabolic PDEs
With Directional Sparsity functional
Time t
u 6= 0
0
Roland Herzog (TU Chemnitz)
u 6= 0
Location of actuators
Sparsity in Nonlinear Optimal Control
Space x
Warwick
28 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Directional Sparsity: Basic Definition
Problem formulation
1
α
kSu − yd k2H + kuk2L2 (Ω)
2
2
Ω2 (x1 )
min
x2
+ β kukL1 (L2 )
s.t.
ua ≤ u ≤ ub
Roland Herzog (TU Chemnitz)
a.e. in Ω
Sparsity in Nonlinear Optimal Control
Ω1
Warwick
x1
x1
29 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Directional Sparsity: Basic Definition
Problem formulation
1
α
kSu − yd k2H + kuk2L2 (Ω)
2 Z
2
Z
1/2
+β
u(x1 , x2 )2 dx2 dx1
Ω1
s.t.
Ω2 (x1 )
min
x2
Ω2 (x1 )
ua ≤ u ≤ ub
Roland Herzog (TU Chemnitz)
a.e. in Ω
Sparsity in Nonlinear Optimal Control
Ω1
Warwick
x1
x1
29 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Related Approaches
Joint sparsity in image restoration
Ψ(u) =
X
ωλ |~u λ |pq ,
q = 2, p = 1
λ∈Λ
Ω1 =
bΛ
Ω2 = {1, 2, . . . , # of channels}
with dx2 = counting measure
[Fornasier, Ramlau, Teschke (2008)]
TV-based image restoration
Z
|∇u| dx1 ,
Ψ(u) =
Ω2 = {1, 2, . . . , N} for N-D images
Ω1
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
30 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
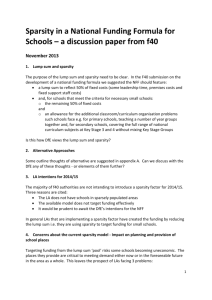
Parabolic Example with Spatial Sparsity
Parabolic example
1
2 ky
− yd k2L2 (Ω) + β kukL1 (L2 )
1
yt − 10 ∆y = u in Ω = Ω1 × (0, T )
y =0
on Γ × (0, T )
y (·, 0) = 0
in Ω1
minimize
s.t.
and ua ≤ u ≤ ub
sparsity pattern of u
a.e. in Ω
1
0.9
0.8
0.7
0.6
n = 2 sparse directions (space)
0.5
0.4
N − n = 1 non-sparse direction (time)
0.3
0.2
0.1
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
Roland Herzog (TU Chemnitz)
0.1
0
0
Sparsity in Nonlinear Optimal Control
Warwick
31 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
Summary
use of kukL1 induces sparse solutions
it is often an appropriate measure of control cost
applications in actuator placement problems
presented 1st- and new 2nd-order optimality conditions
used them to derive FE error estimates
extension to directional sparsity concept
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
32 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
References I
E. Casas, R. Herzog, and G. Wachsmuth.
Optimality conditions and error analysis of semilinear elliptic control problems with L1 cost
functional.
Technical report, 2010.
C. Clason and K. Kunisch.
A duality-based approach to elliptic control problems in non-reflexive Banach spaces.
ESAIM: Control, Optimisation, and Calculus of Variations, in print.
doi: 10.1051/cocv/2010003.
M. Fornasier, R. Ramlau, and G. Teschke.
The application of joint sparsity and total variation minimization algorithms in a real-life
art restoration problem.
Advances in Computational Mathematics, 31(1–3):301–329, 2009.
URL http://dx.doi.org/10.1007/s10444-008-9103-6.
M. Hinze.
A variational discretization concept in control constrained optimization: The
linear-quadratic case.
Computational Optimization and Applications, 30(1):45–61, 2005.
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
33 / 34
Introduction and Problem Setting
1st- and 2nd-Order Optimality Conditions
Finite Element Error Estimates and Examples
Extension: Directional Sparsity
References II
G. Stadler.
Elliptic optimal control problems with L1 -control cost and applications for the placement
of control devices.
Computational Optimization and Applications, 44(2):159–181, 2009.
URL http://dx.doi.org/10.1007/s10589-007-9150-9.
G. Vossen and H. Maurer.
On L1 -minimization in optimal control and applications to robotics.
Optimal Control Applications and Methods, 27(6):301–321, 2006.
Roland Herzog (TU Chemnitz)
Sparsity in Nonlinear Optimal Control
Warwick
34 / 34