Theoretical and Computational Aspects of Scattering from Periodic Surfaces: Two-dimensional Transmission Surfaces
advertisement

Theoretical and Computational Aspects
of Scattering from Periodic Surfaces:
Two-dimensional Transmission Surfaces
Using the Spectral-Coordinate Method
J. DeSanto, G. Erdmann, W. Hereman,
B. Krause, M. Misra, and E. Swim
MCS-00-07R
June 2001
submitted to: Waves in Random Media (2001)
Department of Mathematical and Computer Sciences
Colorado School of Mines
Golden, CO 80401-1887, USA
Phone: (303) 273-3860
Fax: (303) 273-3875
Email: jdesanto@mines.edu
Abstract
We consider the scattering from and transmission through a two-dimensional
periodic surface. We use the spectral-coordinate (SC) method for all the computations. It was the fastest method for one-dimensional problems and proved optimal
for the scattering from two-dimensional surfaces where computation time can prove
to be excessive. In particular we can avoid approximation methods and solve the
exact equations. The SC equations are derived for an infinite surface and reduced
to coupled equations for a periodic surface which are solved numerically for the two
boundary unknowns. Solutions of the SC equations for various periodic sinusoidal
surface examples are studied. The surfaces vary in roughness ands period. Extensive
computations are included in terms of the maximum roughness slope which can be
computed using the method with a fixed maximum error as a function of azimuthal
angle of incidence, polar angle of incidence, wavelength to period ratio, density ratio and wavenumber ratio. Examples of reflectionless interfaces as a function of
density and wavenumber are presented. Particular attention is paid to the case of
near-grazing incidence.
As a result of these extensive computations we conclude that the SC method is
stable and robust (a) over the entire incident azimuthal variability, (b) over a 50-fold
change in value of the wave number ratio, and (c) as the density parameter varies
over two orders of magnitude. In addition SC works very well under extreme neargrazing conditions even for very rough surfaces with large slopes over a very broad
parameter range in density and wavenumber. Spectral based methods can thus play
an important role in the description of the scattering from two-dimensional periodic
surfaces.
PART I: THEORETICAL DEVELOPMENT FOR AN INFINITE
SURFACE
1
Introduction and Notation
In previous reports [7, 10] and papers [11, 12] we presented the theoretical and computational results of scattering from one-dimensional rough surfaces. We studied several
methods. They were all exact theoretical developments which were discretized and solved
as matrix systems, and characterized by the space in which the rows and columns of the
matrices were sampled, either coordinate (C) space or spectral (S) space. The coordinatecoordinate (CC) method was the usual method of moments. The spectral-coordinate (SC)
method used the Weyl representation of the free-space Green’s function to generate equations in a mixed spectral and coordinate representation, and the spectral-spectral (SS)
method had the equations fully in the spectral space. The results of our one-dimensional
scattering confirmed that the SC method was the fastest method (usually by several orders of magnitude) in terms of fill time, i. e. the time necessary to create the matrix. For
two-dimensional problems this is even more important.
The SC method was designed for speed but the computations are limited by maximum
roughness (slope) and we quantify these limitations for the two-dimensional transmission
problem in this paper. Our computations reveal however that the SC method is quite
robust in terms of its ability to produce highly accurate results over a wide range of
2
incident angles (including near-grazing incidence and reflection), surface period, and two
orders of magnitude variability in density and wavenumber ratios for the two homogeneous
media the surface separates. In this paper we use only this method to study the scattering
and transmission from two-dimensional periodic surfaces.
Other methods have been used to treat the scattering and transmission from twodimensional surfaces. For perfectly reflecting surfaces Kim et al. [13] used previous work
of ours [3, 4] but then expanded the boundary unknowns in Fourier series. This is different
from our spectral-spectral method discussed (for one-dimensional surfaces) in [12], and it is
different from our approach here where we compute the discrete two-dimensional physical
boundary unknowns in coordinate-space. In doing so we are able to solve problems with
much larger surface heights than these authors reported. Boag et al. [2] used a method
of fictitious simple sources located off the physical boundaries. The fields radiated by
the fictitious sources are computed by summing Floquet modes and their amplitudes are
adjusted to satisfy the approximate boundary conditions. In contrast we solve the exact
integral equations. Tran and Maradudin [15] solved the integral equations in coordinate
space using iterative techniques. Their surfaces were random and in order to solve for a
large ensemble of surfaces, the solutions for each surface realization was optimized using
a massively parallel computer. For our scalar two-dimensional problem, the SC method
required not only a very brief time to fill the matrix but a small solution time also.
Wagner et al. [16] used a method they refer to as fast multipole/fast Fourier transform.
Again they were interested in optimizing the solution for a single member of an ensemble
of surfaces (in their case for a two-dimensional vector wave problem). Pak et al. [14]
used another technique called the sparse-matrix canonical grid method to the same end.
For acoustic scattering Berkhoff et al. [1] compared the computational efficiency rate of
convergence and residual error for two iterative methods (again with the aim of solving for
an ensemble of surfaces). For a thorough discussion of these and other methods we refer
to a forthcoming review paper [6]. All authors point out the difficulties of computing any
fully two-dimensional scattering problem, and all are faced with fill-time questions which
our SC method enables us to resolve.
In Part I we present the theoretical development for an infinite surface. In Part II we
specify this to a periodic surface and in Part III we summarize the computational results
for a periodic surface.
In Sec. 1 we define the notation. In Sec. 2 we use Green’s theorem in regions above
and below the surface to derive spectral-coordinate (SC) equations relating the boundary
values to the scattered and transmitted fields. In Sec. 3 we evaluate the scattered and
transmitted fields using spectral representations. Snell’s law in Sec. 4 is used to simplify
the results and in Sec. 5 we derive the flux conservation result which is used as an a
posteriori check on our computations. The reduction to a periodic surface is derived in
Sec. 6. The energy balance for the resulting discrete spectrum of waves is also in Sec. 6,
and a summary of the numerical solution technique is presented in Sec. 7. We are able
to abbreviate the results in several theoretical sections because of previous papers and
whenever possible consistent with clarity and readability we do so.
In Section 8 we present the results for the rough interface where we have transmission. We treat several examples of surfaces in Secs. 8.1 to 8.3. We study convergence
as a function of φi , the azimuthal angle of incidence (Sec. 8.4), as a function of κ, the
3
ratio of wavenumbers (Sec. 8.5), and as a function of ρ, the density or electromagnetic
parameter ratio (Sec. 8.6). The parameters were varied over several orders of magnitude.
Fixing an upper bound on the error we present results of the maximum roughness (slope)
attainable as a function of θi , the polar angle of incidence (Sec. 8.7), as it varies from 0◦
(vertical incidence) to 89.99◦ (near-grazing incidence), as a function of ρ (Sec. 8.8), as a
function of ρ for near-grazing incidence (Sec. 8.9), as a function of κ (Sec. 8.10), and as a
function of κ for near-grazing incidence (Sec. 8.11). All the results were generated using
the two-dimensional SC method developed for periodice surfaces. Most computations were
performed using MATLAB 5.2 on a Sun SPARC station 20. Some computations were done
using MATLAB 5.3 on a customized Pentium III-500 MHz PC. These latter computations
will be clearly indicated in the figure captions.
The summary and conclusions are presented in Sec. 9.
Note that the derivation is analogous to the electromagnetic case discussed previously
in [5]. The objective of this study was to provide results for a broad suite of parameter
values in order to assess the computational speed and accuracy of the SC method for
two-dimensional scattering. The computations we present are a representative sample of
the extensive computations in our report [8].
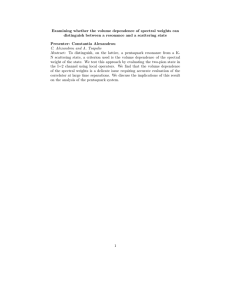
In Figure 1 we illustrate the geometry and definitions for the derivation of the spectralcoordinate method in 2 dimensions. Here x = (x, y, z) = (xt , z) denotes a vector in the
3 dimensional Cartesian space, and xt = (x, y). The z−axis points vertically upwards,
the x−axis points towards the right, and the y−axis is such that (x, y, z) form a righthanded coordinate system. The two-dimensional surface is specified by z = h(xt ), and xh
= (xt , h(xt )) is a position vector on the surface.
z
h(xt )
y
R
z = S1
ρ1 , k1 =
V1
ω
c1
x
ρ2 , k2 =
V2
ω
c2
z = S2
T
Figure 1: Illustration of the geometry and region parameters. The infinite rough surface
h(xt ) separates two homogeneous half-spaces defined by constant densities ρj , wavenumbers kj and wave speeds cj (j = 1, 2). ω is circular frequency and the constant planes
z = Sj refer to the highest (j = 1) and lowest (j = 2) rough surface excursion. The
regions R, V1 , V2 and T are defined in the text.
There are 4 regions of interest: R, V1 , V2 and T. They are defined as follows:
4
• For region R : z ≥ S1 . The value S1 is assumed to be above the highest surface
excursion.
• For region V1 : h(xt ) < z ≤ S1 .
• For region V2 : S2 ≤ z < h(xt ).
• For region T : z ≤ S2 , where S2 is below the lowest surface excursion.
ψ is the symbol for the acoustic velocity potential which satisfies the appropriate Helmholtz
equation in different regions.
2
Spectral-Coordinate (SC) Equations
In region V1 the density is ρ1 , and the wave number of the incident sound wave is k1 = ω/c1.
− L2
z
y
S1
L
2
ρ1 , k1
V1
x
h(xt )
Figure 2: V1 is the region between the rough surface and the highest surface excursion.
This region is bounded by h(xt ) and S1 vertically and ± L2 horizontally. In the derivation
of the equations we let L → ∞ for the results through Section 5.
Figure 2 illustrates region V1 . The shaded area is defined by h(xt ) < z ≤ S1 and − L2 ≤
x, y ≤ L2 . V1 is specified by the characteristic function
θ1 (x) =
1,
0,
x ∈ V1 ,
x∈ V1 ,
(2.1)
which is given by
θ1 (x) = θ(z − h(xt ))θ(S1 − z)θ+ (xt ),
(2.2)
where θ is the Heaviside function and
θ+ (xt ) = θ(x +
L L
L L
)θ( − x)θ(y + )θ( − y).
2
2
2
2
(2.3)
The full derivation of the equations relating the unknown boundary fields on h and the
scattered field on S1 was done in [8] and [9]. We summarize the results here for completeness.
We define planar wave states in V1 as
±
φ±
1 (x) = exp[ik1 M · x],
5
(2.4)
where M± = (−Mt , ±Mz ), Mt = (Mx , My ), and
⎧
⎨
Mz =
⎩
+ 1 − Mt2 ,
+i Mt2 − 1,
Mt2 < 1,
Mt2 > 1.
They satisfy the same Helmholtz equation as the field ψ (1) in region V1
(∂l ∂l +
k12 )
φ±
1 (x)
ψ (1) (x)
= 0.
(2.5)
The result of the derivation is the relation
U ± = S1± ,
(2.6)
where the terms are defined by
U ± = ik1
∞
−∞
± (1)
φ±
1 (xh ) [nl Ml ψ (xh ) −
1
nl ∂l ψ (1) (xh )] dxt ,
ik1
(2.7)
1 ∂ (1)
ψ (x1 )] dxt ,
ik1 ∂z
(2.8)
integrated on the upper part of the surface h, and
S1± = ik1
∞
−∞
(1)
φ±
1 (x1 ) [±Mz ψ (x1 ) −
integrated on the surface S1 . Here nl = δl3 − δl1 hx − δl2 hy is the normal to h.
In (2.7) the field ψ (1) and its normal derivative are evaluated on the surface. These are
related to the boundary unknowns. The field and normal derivative on the surface S1 in
(2.8) will be evaluated using a spectral representation in Sec. 3.
h(xt )
z
y
− L2
x
ρ2 , k2
V2
S2
L
2
Figure 3: V2 is the region between the rough surface and the lowest surface excursion.
This region is bounded by h(xt ) and S2 vertically and ± L2 horizontally. In the derivation
of the equations L → ∞ for the results through Section 5.
Figure 3 illustrates region V2 . In V2 the density is ρ2 and the wavenumber is k2 . The
shaded area is defined by S2 ≤ z < h(xt ) and − L2 ≤ x, y ≤ L2 . V2 is specified by the
characteristic function
1,
x ∈ V2 ,
(2.9)
θ2 (x) = 0,
x∈ V2 .
We define
θ2 (x) = θ(h(xt − z))θ(z − S2 )θ+ (xt ),
6
(2.10)
where θ is the Heaviside function and θ+ is given in (2.3). The vector derivative of θ2 is
∂l θ2 (x) = −nl (xt )δ(z − h)θ+ + δl3 δ(z − S2 )θ+ + θ(h − z)δ(z − S2 )∂l θ+ ,
(2.11)
where ∂l θ+ is the vector derivative of (2.3). Furthermore, the field ψ is replaced by
ψ (2) (x) ∈ V2 .
Assuming that ψ (2) (x) is source free in V2 , it satisfies the Helmholtz equation
(∂l ∂l + k22 )ψ (2) (x) = 0.
(2.12)
In V2 plane wave states are defined as
±
φ±
2 (x) = exp[ik2 P · x],
(2.13)
where P± = (−Pt , ±Pz ), Pt = (Px , Py ), and
⎧
⎨
Pz =
⎩
Pt2 < 1,
+ 1 − Pt2,
+i Pt2 − 1,
Pt2 > 1.
These satisfy the same Helmholtz equation
(∂l ∂l + k22 )φ±
2 (x) = 0.
(2.14)
From (2.12) and (2.14) we obtain the following vector identity:
(2)
±
(2)
∂l [∂l φ±
2 (x)ψ (x) − φ2 (x)∂l ψ (x)] = 0.
(2.15)
Multiplying (2.15) by θ2 (x) and integrating over all space in x we get
∞
−∞
(2)
±
(2)
θ2 (x) ∂l [∂l φ±
2 (x)ψ (x) − φ2 (x)∂l ψ (x)] dx = 0.
(2.16)
Integrating (2.16) by parts results in
∞
−∞
(2)
±
(2)
[∂l φ±
2 (x)ψ (x) − φ2 (x)∂l ψ (x)] ∂l θ2 (x) dx = 0.
(2.17)
Again the partially integrated term drops because θ2 (x) defines a bounded region.
Using ∂l θ2 (x) from (2.11) we have to evaluate three types of integrals: An integral over
h; an integral over z = S2 ; and ‘Edge’ or side integrals involving ∂l θ+ .
As for region V1 , we will normalize the integrals to a per unit length by dividing them
all by L2 . The result is
(2.18)
L± (L) = S2± (L) + E2± (L),
where L± (L) are integrals on the lower side of h. Hence,
1
L (L) = 2
L
±
L
2
−L
2
(2)
±
(2)
[nl ∂l φ±
2 (xh )ψ (xh ) − φ2 (xh )nl ∂l ψ (xh )] dxt ,
(2.19)
±
(2)
(2)
where φ±
2 (xh ) = lim− φ2 (x) and nl ∂l ψ (xh ) = lim− nl ∂l ψ (x), both limits from below.
z→h
z→h
7
S2± (L) are the integrals over z = S2 which are
S2± (L)
1 = 2
L
L
2
−L
2
[
∂ ±
∂ (2)
φ2 (x2 )ψ (2) (x2 ) − φ±
ψ (x2 )] dxt ,
2 (x2 )
∂z
∂z
(2.20)
where x2 = (xt , S2 ), and E2± (L) are the integrals on the ‘edge’ given by
E2± (L)
1
= 2
L
h(xt )
S2
dz
L
2
−L
2
(2)
±
(2)
[∂l φ±
2 (x)ψ (x) − φ2 (x)∂l ψ (x)]∂l θ+ dxt .
(2.21)
The limits of integration with respect to z come from the ∂l θ+ part of ∂l θ2 . As L → ∞ the
edge integrals behave like O( L1 ) whereas (2.19) and (2.20) behave like O(1) (see [8, 9]),
and are negleted. If we define
L± = lim L2 L± (L),
(2.22)
L→∞
and
S2± = lim L2 S2± (L),
(2.23)
L± = S2± ,
(2.24)
L→∞
then the equations reduce to
where
±
L =
∞
and
S2± =
−∞
(2)
±
(2)
[nl ∂l φ±
2 (xh )ψ (xh ) − φ2 (xh )nl ∂l ψ (xh )] dxt ,
(2.25)
∂ ±
∂ (2)
φ2 (x2 )ψ (2) (x2 ) − φ±
ψ (x2 )] dxt .
2 (x2 )
∂z
∂z
(2.26)
∞
−∞
[
We note the following:
1. Equation (2.24) relates integrals on z = h to those on z = S2 , a kind of lower region
analytic continuation.
2. L± and S2± are functions of the spectral parameter P± through φ±
2 from (2.13). We
have suppressed it. Indeed, using (2.13),
± ±
nl ∂l φ±
2 (xh ) = ik2 nl Pl φ2 (xh ),
(2.27)
and
∂ ±
φ (x2 ) = ik2 (±Pz )φ±
2 (x2 ),
∂z 2
so that (2.25) and (2.26) are (after ik2 is factored out)
±
L = ik2
∞
and
S2± = ik2
−∞
± (2)
φ±
2 (xh ) [nl Pl ψ (xh ) −
∞
−∞
1
nl ∂l ψ (2) (xh )] dxt ,
ik2
(2)
φ±
2 (x2 ) [±Pz ψ (x2 ) −
which we use in (2.24).
8
1 ∂ (2)
ψ (x2 )] dxt ,
ik2 ∂z
(2.28)
(2.29)
(2.30)
If the ψ fields have the dimensions of a velocity potential then the following continuity
conditions are valid at the interface. First, continuity of pressure which becomes
ρ1 ψ (1) (xh ) = ρ2 ψ (2) (xh ),
(2.31)
and, second, continuity of the normal velocity component which is
nl ∂l ψ (1) (xh ) = nl ∂l ψ (2) (xh ).
(2.32)
If we define ψ(xh ) = ψ (1) (xh ) then
1
ψ (2) (xh ) = ψ(xh ),
ρ
ρ=
ρ2
.
ρ1
(2.33)
If we scale out the factor ik1 in the normal derivative and define N as
then by (2.32) we also have
nl ∂l ψ (1) (xh ) = ik1 N(xh ),
(2.34)
nl ∂l ψ (2) (xh ) = ik1 N(xh ).
(2.35)
This defines the two boundary unknowns ψ(xh ) and N(xh ). Using these definitions, we get
that equations (2.6), (2.7), and (2.8) are
U ± = S1± ,
with
±
U = ik1
and
S1± = ik1
∞
∞
−∞
−∞
(2.36)
±
φ±
1 (xh ) [nl Ml ψ(xh ) − N(xh )] dxt ,
(1)
φ±
1 (x1 ) [±Mz ψ (x1 ) −
1 ∂ (1)
ψ (x1 )] dxt .
ik1 ∂z
(2.37)
(2.38)
Equations (2.24), (2.29), and (2.30) become
L± = S2± ,
(2.39)
with (κ = k2 /k1 )
L± = ik2
and
∞
∞
1
1
±
φ±
2 (xh ) [ nl Pl ψ(xh ) − N(xh )] dxt ,
ρ
κ
−∞
(2.40)
1 ∂ (2)
ψ (x2 )] dxt .
(2.41)
ik2 ∂z
−∞
Of the four equations above, two are used to solve for ψ and N on the boundary xh ; the
two other equations are used to evaluate the reflection and transmission amplitudes after
ψ and N are known on h. First we evaluate equations (2.38) and (2.41). Although the
wavenumber scaling on the S1± and S2± integrals appears awkward we have set it up to
benefit from cancellations later.
S2± = ik2
(2)
φ±
2 (x2 ) [±Pz ψ (x2 ) −
9
3
Evaluate S1± and S2±
We start by evaluating S1± where ψ (1) is the sum of the incident and scattered fields.
In region R : Above the highest surface excursion in region R we can write the total field
ψ (1) (x) as the sum of incident and scattered fields, the latter of which is written as a
superposition of purely upgoing waves using a spectral expansion
ψ (1) → ψR (x) = ψ (0) (x) + ψ SC (x),
where
SC
ψ (x) =
(3.1)
R(αt )eik1 α·x dαt ,
(3.2)
with
α = (αt , αz ),
⎧
⎨
αz =
⎩
(3.3)
+ 1 − αt2 ,
+i αt2 − 1,
αt2 < 1,
(3.4)
αt2 > 1.
Note that we only consider upgoing waves since we are above the highest surface excursion.
ψ (0) (x) is the incident field with an analogous spectral representation
(0)
ψ (x) =
I(β t )eik1 β ·x dβ t ,
where
(3.5)
βz = + 1 − βt2 .
β = (β t , −βz ),
(3.6)
The sign in −βz indicates a downgoing wave superposition (i.e. in the negative z direction).
The combined result enables us to evaluate S1± which was done in [8] and [9] and yields
∞
−∞
φ±
1 (xh )
[nl Ml± ψ(xh )
2(2π)2 Mz
− N(xh )] dxt =
k12
I(Mt )
−R(Mt ).
(3.7)
The top equation will be used to solve for the boundary unknowns and the bottom equation
to evaluate the reflection coefficient R and thus the reflected field by (3.2). Note that the
+ equation (upgoing φ+
1 ) projects out the downgoing incident field and the − equation
−
(downgoing φ1 ) projects out the upgoing reflected field. To evaluate the transmitted field
S2± , expand ψ (2) (x) → ψT (x) in the region z ≤ S2 as a spectral expansion of downgoing
waves (like the incident field expansion).
Using
(2)
ψ (x) → ψT (x) =
T̃ (γ t )eik2 γ ·x dγ t , z ≤ S2 ,
(3.8)
where
γ = (γ t , −γz ),
⎧
⎨
γz =
⎩
+ 1 − γt2 ,
+i γt2 − 1,
10
(3.9)
γt2 < 1,
γt2 > 1,
(3.10)
we compute the integral in (2.41) which yields
S2±
∞
T̃ (γ t ) (±Pz + γz ) [
= ik2
−∞
ik2 γ ·x2
φ±
dxt ] dγ t .
2 (x2 )e
(3.11)
Now, using (2.13), we compute
∞
−∞
ik2 γ ·x2
φ±
dxt =
2 (x2 )e
(2π)2 ik2 (±Pz −γz )S2
e
δ(γ t − Pt ).
k22
(3.12)
Inserting this result in (3.11), we obtain
S2±
ik2 (2π)2
=
k22
T̃ (γ t ) (±Pz + γz ) eik2 (±Pz −γz )S2 δ(γ t − Pt ) dγ t .
When γ t = Pt :
±Pz + γz =
and
±Pz − γz =
Thus,
S2±
(3.13)
2Pz
0,
(3.14)
0
−2Pz .
(3.15)
2(2π)2 Pz
= ik2 [
]
k22
T̃ (Pt )
0.
(3.16)
Using the above results in (2.24) we obtain
∞
−∞
φ±
2 (xh )
1
1
2(2π)2 Pz
[ nl Pl± ψ(xh ) − N(xh )] dxt =
ρ
κ
k22
T̃ (Pt )
0.
(3.17)
Note the analogy with (3.7). The zero on the right hand side of (3.17) illustrates that
there is no incident field from the region below the surface.
4
Snell’s Law and Summary of Equations
The equations to be solved for the boundary unknowns ψ and N are the “+” sign equation
in (3.7):
∞
2Mz (2π)2
+
φ+
(x
)
[n
M
ψ(x
)
−
N(x
)]
dx
=
I(Mt ),
(4.1)
h
l l
h
h
t
1
k12
−∞
and the “–” sign equation in (3.17):
∞
1
1
−
φ−
2 (xh ) [ nl Pl ψ(xh ) − N(xh )] dxt = 0.
ρ
κ
−∞
(4.2)
Given the boundary unknowns, the reflection and transmission amplitudes follow from the
“–” sign equation in (3.7)
∞
−∞
−
φ−
1 (xh ) [nl Ml ψ(xh ) − N(xh )] dxt = −
11
2Mz (2π)2
R(Mt ),
k12
(4.3)
and the “+” sign equation in (3.17):
∞
1
1
2Pz (2π)2
+
φ+
T̃ (Pt ),
2 (xh ) [ nl Pl ψ(xh ) − N(xh )] dxt =
ρ
κ
k22
−∞
(4.4)
The transmitted field is given in (3.8) and written here as
ψT (x) =
T̃ (Pt )eik2 P·x dPt ,
z ≤ S2 ,
(4.5)
where
P = (Pt , −Pz ),
⎧
⎨
+ 1 − Pt2 ,
Pz = ⎩
+i Pt2 − 1,
(4.6)
Pt2 < 1,
Pt2 > 1.
(4.7)
Snell’s law (conservation of ray parameter) is given by
k1 Mt = k2 Pt ,
so that
Pz =
1 2
1 2
1 − 2 Mt =
κ − Mt2 .
κ
κ
(4.8)
(4.9)
This allows one to rewrite φ−
2 as a function of k1 and the ratio κ
−
ik2 P ·xh
φ−
2 (xh ) = e
z h(xt )
= e−ik2 Pt ·xt e−ik2 P√
2
2
= e−ik1 Mt ·xt e−ik1 κ −Mt h(xt ) .
(4.10)
The first exponential terms in the latter product correspond to conservation of horizontal
wave number or ray parameter.
Using (4.8) and (4.9), equation (4.2) can be rewritten as
∞
−∞
φ−
2 (xh )
1 2
[ (− κ − Mt2 + hx Mx + hy My )ψ(xh ) − N(xh )] dxt = 0.
ρ
(4.11)
Note that with respect to the solution of (4.1) and (4.2), it should be clear that if the
sampling of Mt is to be maintained then (4.11) should be used instead of (4.2). (It is not
necessary since Px and Py also generate a sampled set of equations). Further, if we define
the transmitted field as
√ 2 2
T (Mt )eik1 (Mt ·xt − κ −Mt z) dMt ,
(4.12)
ψT (x) =
using the wave number k1 , then from (4.5), (4.8) and the result
T̃ (Pt ) = κ2 T (Mt ),
12
(4.13)
equation (4.4) can be written as
∞
−∞
φ+
2 (xh )
1 2
2(2π)2
[ ( κ − Mt2 + hx Mx + hy My )ψ(xh ) − N(xh )] dxt =
ρ
k12
T (Mt )
0,
(4.14)
which is appropriate for the Mt sampling.
The result is that equations (4.1) and (4.2) (or (4.11)) are used to solve for the boundary
unknowns ψ and N, equation (4.3) is used to evaluate the reflection amplitudes (and thus
the scattered field from (3.2)), and (4.4) (with (4.5)) or (4.14) (with (4.12)) to evaluate
the transmitted field.
For simplicity we introduce two square root notations used henceforth. They correspond to region V1
m1 (Mt ) = 1 − Mt2 ,
(4.15)
and to region V2
κ2 − Mt2 .
m2 (Mt ) =
(4.16)
Further, we confine many of our results to single plane wave incidence. The spectral
amplitude in (3.5) can be written as
(0)
I(Mt ) = δ(Mt − αt ),
where
αx(0) = cos φi sin θi ,
and
αy(0) = sin φi sin θi ,
(0)
m1 (αt ) = cos θi ,
(4.17)
(4.18)
(4.19)
in terms of incident polar (θi ) and azimutal (φi ) angles.
5
Flux Conservation
For any complex field φ(x) the z-component of flux is defined as
Jz (x) = ρB [φ(x)
∂
∂
φ(x) − φ(x) φ(x)],
∂z
∂z
(5.1)
where ρB is the density of the medium and the overbar is complex conjugation.
A spectral representation of φ is
φ(x) =
B(t ) eik·x dt ,
(5.2)
where
= (t , z ),
⎧
⎨
z
=
⎩
(5.3)
+ 1 −
+i
2
t
2
t,
− 1,
13
2
t
2
t
< 1,
> 1.
(5.4)
We can thus write
Jz (x) = ρB
dt dt B(t ) B(t ) {−ik
z
− ik z } eik(t −t )·xt eik(z −z )z .
(5.5)
The flux through an area L2 is
Jˆz =
L
2
−L
2
Jz (x) dxt .
(5.6)
In the limit as L → ∞ this becomes
2
8iπ
ρB
Jˆz = −
k
|B(t )|2 (Re
z ) dt ,
(5.7)
which is independent of z and where only the real part of z appears in the integrals.
For the scattered field replace z by αz = m1 from (3.4) and (4.15), and k by k1 in
(5.7), so that
8iπ 2 SC
ˆ
Jz = −
ρ1
|R(αt )|2 (Re m1 (αt )) dαt ,
(5.8)
k1
and for the incident field replace z by −βz = −m1 from (3.6) and (4.15), and k by k1 in
(5.7), so that
8iπ 2
Jˆzi = −
ρ1
|I(β t )|2 (−Re m1 (β t )) dβt .
(5.9)
k1
For the transmitted field replace
(still) k by k1 in (5.7), to get
2
8iπ
JˆzT = −
ρ2
k1
z
by −m2 (Mt ) from (4.12) and (4.16), ρB by ρ2 and
|T (Mt )|2 (−Re m2 (Mt )) dMt .
(5.10)
The overall energy flux conservation is
Jˆzi + JˆzSC = JˆzT ,
(5.11)
which yields
|I(βt )|2 (Re m1 (β t )) dβt =
|R(αt )|2 (Re m1 (αt )) dαt
+ρ
|T (Mt )|2 (Re m2 (Mt )) dMt .
(5.12)
This is used as a check in our computations. For a single plane wave incident on a periodic
surface see Section 6.
14
PART II: THEORETICAL DEVELOPMENT FOR A PERIODIC
SURFACE
6
Equations for a Periodic Surface
In this section we reduce the equations in Section 4 to those for a periodic surface of period
L1 in x and period L2 in y. For region V1 this was done in [8, 9]. We repeat some of this
for completeness with the V2 results. Equation (4.1) is
∞
−∞
−ik1 Mt ·xt ik1 m1 (Mt )h(xt )
[n+
e
dxt = F in(Mt ),
1 (Mt , xt )ψ(xh ) − N(xh )] e
where
(6.1)
n+
1 (Mt , xt ) = m1 (Mt ) + Mt · ht ,
(6.2)
Mt = (Mx , My ),
(6.3)
and
2(2π)2
m1 (Mt )I(Mt ).
k12
F in (Mt ) =
(6.4)
Similarly, (4.11) becomes
∞
−∞
−ik1 Mt ·xt −ik1 m2 (Mt )h(xt )
[n−
e
dxt = 0,
2 (Mt , xt )ψ(xh ) + ρN(xh )] e
where
n−
2 (Mt , xt ) = m2 (Mt ) − Mt · ht .
(6.5)
(6.6)
Floquet conditions on the surface fields
(0)
ψ
ik1 αt ·Lt ψ
(x
+
L
,
y
+
L
)
=
e
1
2
N
N (x, y),
(6.7)
where
(0)
αt = (αx(0) , αy(0) ),
Lt = (L1 , L2 ),
(6.8)
yield a sum over an infinite number of finite cells (p, q run from −∞ to ∞) from (6.1):
L1 L2
p
q
Ip(1)q (Mt ) = F in(Mt ),
(6.9)
where
Ip(1)q (Mt ) =
1
L1 L2
(2p+1)L1 /2
(2p−1)L1 /2
dx
(2q+1)L2 /2
(2q−1)L2 /2
dy [n+
1 (Mt , xt )ψ(xh ) − N(xh )] ·
· e−ik1Mt ·xt eik1 m1 (Mt )h(xt ) .
(6.10)
If we change variables to x = x − pL1 and y = y − qL2 , and note that n+
1 (Mt , xt ) is
periodic, we can then use the Floquet conditions (6.7) on ψ and N to write
(0)
Ip(1)q (Mt ) = eik1 αx
pL1
(0)
eik1 αy
qL2
15
(1)
e−ik1 Mt ·(pL1 ,qL2 ) I0 0 (Mt ).
(6.11)
Then (6.9) becomes
(0)
(1)
L1 L2 I0 0 (Mt )
eik1 (αx
p
(0)
−Mx )pL1
eik1 (αy
q
−My )qL2
= F in(Mt ).
(6.12)
These are just Poisson sums:
(1)
L1 L2 I0 0 (Mt )
λ1
L1
∞
j=−∞
λ1
L2
δ(Mx − αjx )
∞
j =−∞
δ(My − αj y ) = F in (Mt ),
(6.13)
where
λ1
λ1
, and αj y = αy(0) + j ,
L1
L2
are the Bragg equations in the 2 dimensions.
The result of (6.12) is thus
αjx = αx(0) + j
(1)
I0 0 (Mt )
∞
j=−∞
δ(Mx − αjx )
∞
j =−∞
δ(My − αj y ) =
1 in
F (Mt ).
λ21
(6.14)
(6.15)
The same sequence of operations applied to (6.5) yields
∞
(2)
I0 0 (Mt )
j=−∞
δ(Mx − αjx )
∞
j =−∞
δ(My − αj y ) = 0,
(6.16)
where
(2)
I0 0 (Mt )
L1 /2
1
=
L1 L2
−L1 /2
dx
L2 /2
−L2 /2
dy [n−
2 (Mt , xt )ψ(xh ) + ρN(xh )]
e−ik1 Mt ·xt e−ik1 m2 (Mt )h(xt ) .
(6.17)
Integrating (6.15) and (6.16), using the following integration scheme,
lim
j →0
αpx +1 λ1
L1
λ
αpx −1 L1
dMx
1
αqy +2 λ1
L2
λ
αqy −2 L1
dMy
0<
j
< 1,
j = 1, 2,
(6.18)
dMy F in(Mt ),
(6.19)
2
these equations become
(1)
I0 0 (αjx , αj y )
1
= 2
λ1
and
αpx +1 λ1
L1
λ
αpx −1 L1
dMx
1
αqy +2 λ1
L2
λ
αqy −2 L1
2
(2)
I0 0 (αjx , αj y ) = 0.
(6.20)
For a single plane wave incidence, from Sec. 4 and (6.4),
2(2π)2
m1 (Mt ) δ(Mx − αx(0) ) δ(My − αy(0) ),
F (Mt ) =
2
k1
in
(6.21)
and equation (6.19) becomes
(1)
(0)
I0 0 (αjx , αj y ) = 2m1 (αt ) δj0 δj 0 .
16
(6.22)
The equations to solve are (6.22) and (6.20), which are explicitly,
L1 /2
1
L1 L2
−L1 /2
L2 /2
dx
−L2 /2
dy [(m1 (αjx , αj y ) + αjx hx + αj y hy ) ψ(xh ) − N(xh )] ·
(0)
· e−ik1(αjx x+αj y y) eik1 m1 (αjx ,αj y )h(xt ) = 2m1 (αt )δj0 δj 0 ,
1
L1 L2
L1 /2
−L1 /2
L2 /2
dx
−L2 /2
(6.23)
dy [(m2 (αjx , αj y ) − αjx hx − αj y hy ) ψ(xh ) + ρN(xh )] ·
· e−ik1 (αjx x+αj y y) e−ik1 m2 (αjx ,αj y )h(xt ) = 0.
Note that
(6.24)
2
1 − αjx
− αj2 y ,
(6.25)
2
κ2 − αjx
− αj2 y .
(6.26)
m1 (αjx , αj y ) =
and
m2 (αjx , αj y ) =
For a periodic surface the reflected and transmitted fields are discrete infinite sums of
Bragg waves. These can be written using (3.2)
SC
R(Mt ) eik1 Mt ·xt eik1 m1 (Mt )z dMt ,
ψ (x) =
where here
∞
R(Mt ) =
so that
∞
∞
ψ (x) =
j=−∞ j =−∞
Using (4.12)
ψT (x) =
we have
which yields
Ajj eik1 (αjx x+αj y y) eik1 m1 (αjx ,αj y )z .
(6.29)
∞
∞
j=−∞ j =−∞
(6.30)
Bjj δ(Mx − αjx ) δ(My − αj y ),
(6.31)
Bjj eik1 (αjx x+αj y y) e−ik1 m2 (αjx ,αj y )z .
(6.32)
j=−∞ j =−∞
∞
ψT (x) =
(6.28)
T (Mt ) eik1 Mt ·xt e−ik1 m2 (Mt )z dMt ,
∞
T (Mt ) =
Ajj δ(Mx − αjx ) δ(My − αj y ),
j=−∞ j =−∞
∞
SC
(6.27)
Equations (4.3) and (4.14) (upper equation) reduce to
(0)
(1)
L1 L2 J0 0 (Mt )
p
eik1 (αx
(0)
−Mx )pL1
q
eik1 (αy
−My )qL2
=
2(2π)2
m1 (Mt ) R(Mt ),
k12
(6.33)
2(2π)2
m2 (Mt ) T (Mt ),
k12
(6.34)
and
(0)
(2)
L1 L2 J0 0 (Mt )
p
eik1 (αx
(0)
−Mx )pL1
q
eik1 (αy
17
−My )qL2
=ρ
where
(1)
J0 0 (Mt )
1 L1 /2 (L2 /2
=
dx
dy [(m1 (Mt ) − Mt · ht )ψ(xh )+ N(xh )]
L1 L2 −L1 /2
−L2 /2
e−ik1 Mt ·xt e−ik1 m1 (Mt )h(xt ) ,
and
(2)
J0 0 (Mt ) =
1
L1 L2
L1 /2
(L2 /2
−L1 /2
dx
−L2 /2
(6.35)
dy [(m2 (Mt ) + Mt · ht )ψ(xh )− ρN(xh )]
e−ik1 Mt ·xt eik1 m2 (Mt )h(xt ) .
(6.36)
Next, use the Poisson sum evaluation and integration as in Section 6, to get the explicit
equations that must be evaluated
(1)
J0 0 (αjx , αj y ) = 2m1 (αjx , αj y ) Ajj ,
and
(2)
J0 0 (αjx , αj y ) = 2ρm2 (αjx , αj y ) Bjj ,
where
(1)
J0 0 (αjx , αj y ) =
(6.38)
1 L1 /2 L2 /2
dx
dy [(m1 (αjx , αj y ) − αjx hx − αj y hy ) ψ(xh ) +N(xh )] ·
L1 L2 −L1 /2
−L2 /2
(6.39)
· e−ik1 (αjx x+αj y y) e−ik1 m1 (αjx ,αj y )h(xt ) ,
and
(2)
J0 0 (αjx , αj y ) =
(6.37)
1
L1 L2
L1 /2
−L1 /2
L2 /2
dx
−L2 /2
dy [(m2 (αjx , αj y ) + αjx hx + αj y hy ) ψ(xh ) −ρN(xh )] ·
· e−ik1 (αjx x+αj y y) eik1 m2 (αjx ,αj y )h(xt ) .
(6.40)
In summary, the procedure is to compute the boundary unknowns ψ(xh ) and N(xh )
using (6.23) and (6.24) and use them in (6.39) and (6.40) to compute the scattered amplitudes by (6.37) and the transmission amplitudes from (6.38). The scattered and transmitted fields are then found from (6.29) and (6.32). The flux conservation or energy balance
follows from the results in Section 5. The major difference is that the reflection and transmission coefficients are discrete sums as in (6.28) and (6.31). For a single plane wave as
defined in (4.17)-(4.19) it can easily be shown that the energy balance result is analogous
to (5.12) and given by
m1 (αx(0) , αy(0) ) =
j,j |Ajj |2 (Re m1 (αjx , αj y )) + ρ
p,p
|Bpp |2 (Re m2 (αpx , αpy )),
(6.41)
where the summations extend over all j, j values such that m1 (defined in (6.25) ) is real
and all p, p values such that m2 (defined in (6.26) ) is real, i.e. over all real scattered and
transmitted Bragg orders. This is used as a check in our calculations as follows: Divide
the equation by m1 (αx(0) , αy(0) ) so the left hand side of (6.41) is 1 and the resulting right
hand side is called the normalized energy. The resulting error is
Error = log10 |1 − Normalized Energy|.
(6.42)
We have effectively scaled the incident energy to 1, and the normalized energy is the total
energy in the scattered and transmitted fields.
18
7
Numerical Methods
In this section we summarize the computational methodology. The equations to solve are
(6.22) and (6.20), which are already discrete in spectral space. These integral equations
are then discretized over the rough surface in coordinate space to give (wp are weight
functions)
M
N
q=1 p=1
[(m1 (αjx , αj y ) + αjx hx (xp , yq ) + αj y hy (xp , yq )) ψ(xp , yq , h(xp , yq ))
−N(xp , yq , h(xp , yq ))] e−ik1 αjx xp e−ik1 αj y yq eik1 m1 (αjx ,αj y )h(xp ,yq ) wp wq
(0)
= 2L1 L2 m1 (αt ) δj0 δj 0 ,
(7.1)
and
M
N
q=1 p=1
[(m2 (αjx , αj y ) − αjx hx (xp , yq ) − αj y hy (xp , yq )) ψ(xp , yq , h(xp , yq ))
+ρN(xp , yq , h(xp , yq ))] e−ik1 αjx xp e−ik1 αj y yq e−ik1 m2 (αjx ,αj y )h(xp ,yq ) wp wq = 0.
(7.2)
These integral equations can be written as matrix equations by defining the following
matrices:
[M1]jj , pq = e−ik1 αjx xp e−ik1 αj y yq eik1 m1 (αjx ,αj y )h(xp ,yq ) wp wq ,
[K1]jj , pq = [(m1 (αjx , αj y ) + αjx hx (xp , yq ) + αj y hy (xp , yq )] [M1]jj , pq
(7.3)
(7.4)
[M2]jj , pq = e−ik1 αjx xp e−ik1 αj y yq e−ik1 m2 (αjx ,αj y )h(xp ,yq ) wp wq ,
[K2]jj , pq = [m2 (αjx , αj y ) − αjx hx (xp , yq ) − αj y hy (xp , yq )] [M2]jj , pq .
(7.5)
(7.6)
The coordinate indices p and q and the spectral indices j and j are formed as products
to create the matrix column and row indices in (7.3)–(7.6). This is done as follows: for the
two-dimensional coordinate sampling indices p (say N samples in x) and q (M samples in
y) we have a total of M · N coordinate samples labeled in a one-dimensional string running
from 1 to M · N. For the two-dimensional spectral sampling for real propagating Bragg
modes the indices j and j each run from a minimum to a maximum value for which m1 in
(6.25) is real for real scattered modes and from a (generally different) minimum to a maximum value for which m2 in (6.26) is real for real transmitted modes. A schematic outline
of these one-dimensional strings for the perfectly reflecting two-dimensional problem is
in [8, 9].
The vectors b, Ψand N are defined as
(0)
bjj = 2L1 L2 m1 (αt )δj0 δj 0 ,
ψpq = ψ(xp , yq , h(xp , yq )),
Npq = N(xp , yq , h(xp , yq )),
(7.7)
(7.8)
(7.9)
so the whole system can be expressed as
K1 −M1
K2 ρM2
Ψ
N
19
=
b
0
.
(7.10)
The reported system size is the size of the matrix
K1 −M1
K2 ρM2
,
(7.11)
and it is the condition number of this matrix which is quoted. When κ = 1, the system
is not square. For this case, a single equation is used for the current, and a Dirichlet to
Neumann map is used for the field to yield
N = − M1 + K1 [K2]−1 ρM2
and
Ψ = [K1]−1 [b + M1 N].
The pseudo inverse is used for all inverses.
20
−1
b,
(7.12)
(7.13)
PART III: COMPUTATIONAL RESULTS FOR PERIODIC SURFACES
8
Transmission Interface Computations
In this section we present results for the full transmission case using the theoretical results
from Sections 6-7. In particular, we base the solution on Eq. (7.10).
We present tables of results for both square and non-square systems of equations and
plots of the boundary unknowns and scattered fields. The square systems results are a
degenerate case of transmission where only the density changes in the lower region. The
non-square systems also involved a change in wavenumber (κ = 1) and consequently a
different number of radiating orders above and below the surface. Although even these
systems could be made square by appropriate coordinate sampling, the non-square systems
resulted in smaller condition numbers and better error results.
Three wavelength parameter examples are presented in Sec. 8.1 (wavelength less than
surface periods), Sec. 8.2 (wavelength approximately the same as the periods) under conditions of near-grazing incidence and reflection, and Sec. 8.3 (wavelength much greater
than the surface periods). In Sec. 8.4, the azimuthal angle of incidence φi is varied from
0◦ to 90◦ in 5◦ increments using different spectral and coordinate sampling schemes. Convergence was excellent and nearly uniform for all cases. In Sec. 8.5, we present a suite of
κ-values ranging from 0.1 to slightly over 5. The results for κ-values less than one amount
to inverting the usual layer scattering problems since the medium of the incident field has
the higher wavenumber. We include these examples to demonstrate the flexibility of the
numerical codes. In Sec. 8.6 we present a suite of ρ-values ranging from 0.1 to 10, with the
values less than one representing incidence on a less dense medium. Again the flexibility of
the numerical code is evident. For both κ- and ρ-variability we present examples of perfect
transmission, i.e. reflectionless surfaces. The maximum roughness (slope) values at fixed
error are included in Sec. 8.7 (with respect to θi , the polar angle of incidence), Sec. 8.8
(with respect to ρ), Sec. 8.9 (with respect to ρ at near-grazing incidence), Sec. 8.10 (with
respect to κ), and Sec. 8.11 (with respect to κ at near-grazing incidence). The examples
we present are representative of far more extensive computations presented in [8].
From these extensive computations we can conclude that the SC method is an efficient
and highly robust compuational method to describe the scattering from two-dimensional
periodic interfaces.
8.1
Example 1
The results in Table 1 and Figs. 4, 5 and 6 are based on the following surface parameters:
S(x, y) = −(d/2) cos(2πx/L1 ) cos(2πy/L2 ), where L1 = L2 = 1, d/L1 = d/L2 = 0.075,
λ/L1 = λ/L2 = 0.25, ρ = 2, and κ = 1. The number of radiating orders above and below
the surface is 48. The incident and azimuthal angles are θi = 75◦ and φi = 15◦ . The
fraction of the energy that is reflected is 0.12.
All the examples in Table 1 contained evanescent waves both above and below the
surface. Fill times for even a very large matrix were very small as was the linear solution time. The systems studied were all square with the coordinate sampling adjusted to
21
equal the total number of propagating plus evanescent modes in the spectral sampling.
Generally the more evanescent modes the better the energy check. Slopes were moderate
(π d/L ∼ 0.24) as was the condition number. Coordinate sampling was relatively sparse
(2-3 samples per wavelength) yet still provided a good energy check. Plots of the total
field and normal derivative on the surface are illustrated in Fig. 4. These can be compared with the corresponding pictures in Fig. 7 for the case where the wavelength and
surface periods are approximately equal. Various representations of the scattered field are
plotted in Figs. 5 and 6. For this very large number of real propagating scattered modes
it becomes difficult to represent the scattered field and we believe the somewhat unconventional representations in Fig. 5 yield the best overall picture. Contrast the results to
those in Fig. 8 where the wavelength was approximately equal to the surface periods.
System
Size
112 × 112
144 × 144
180 × 180
220 × 220
264 × 264
312 × 312
364 × 364
Number of Samples
Coord.
Spectral
Above Below
x y j j j j
8 7 8 7 8 7
9 8 9 8 9 8
10 9 10 9 10 9
11 10 11 10 11 10
12 11 12 11 12 11
13 12 13 12 13 12
14 13 14 13 14 13
λ/∆x
2.0000
2.2500
2.5000
2.7500
3.0000
3.2500
3.5000
λ/∆y
1.7500
2.0000
2.2500
2.5000
2.7500
3.0000
3.2500
Fill
Time (s)
0.1400
0.1900
0.2500
0.3200
0.3900
0.4900
0.6000
Linear
Solution
Time (s)
0.0400
0.0800
0.1400
0.3100
0.6200
1.1200
1.8300
Condition
Number
12.6264
42.1853
55.1987
85.5216
83.3558
112.6966
131.1395
Error
-1.7273
-2.8514
-2.7312
-4.1872
-3.4966
-4.7103
-4.2105
Table 1: Parameters and computational results for Example 1 of the transmission problem.
Spectral modes in both x and y and both above and below the surface are present. The
coordinate sampling is the product of the numbers in the columns “x” and “y” then
doubled to cover both reflection and transmission regions. Only square systems were
treated and the wavelength was 1/4 of the two equal surface periods. (Computations were
done on a customized Pentium III 500 MHz PC).
22
Re[ψ T (x, y, S(x, y)]
|ψ T (x, y, S(x, y))|
0.5
0.5
0.4
1.42
0.4
1
0.3
0.2
1.38
0.2
0.5
0.1
y
1.4
0.3
1.36
0.1
0
0
y
1.34
0
1.32
−0.1
−0.1
−0.5
−0.2
1.3
−0.2
1.28
−0.3
−0.3
1.26
−1
−0.4
−0.4
1.24
−0.5
−0.5
−0.4
−0.3
−0.2
−0.1
0
x
0.1
0.2
0.3
0.4
−0.5
−0.5
0.5
−0.4
−0.3
−0.2
−0.1
0
x
(a)
0.1
0.2
0.3
0.4
0.5
(b)
|N(x, y, S(x, y))|
Re[N(x, y, S(x, y)]
0.5
0.5
0.3
0.4
0.4
0.2
0.3
0.3
0.3
0.2
0.25
0.2
0.1
0.1
0.1
0.2
y
0
0
y
−0.1
0
0.15
−0.1
−0.1
−0.2
−0.2
0.1
−0.2
−0.3
−0.4
−0.3
0.05
−0.4
−0.3
−0.5
−0.5
−0.4
−0.3
−0.2
−0.1
0
x
0.1
0.2
0.3
0.4
−0.5
−0.5
0.5
(c)
−0.4
−0.3
−0.2
−0.1
0
x
0.1
0.2
0.3
0.4
0.5
(d)
Figure 4: Example 1 for the transmission problem with a square system of size 220 × 220
and κ = 1. Real part (a) and magnitude (b) of the total field ψ T on the surface and real
part (c) and magnitude (d) of the surface current or normal derivative N on the surface.
23
√
SC
ψ
x, y, R2
√
Re ψ SC x, y, R2 − x2 − y 2 , R = 2L
2
− x2 − y 2 , R = 2L
2
0.45
0.4
1.5
1.5
0.4
0.3
1
1
0.2
0.35
0.5
y
0.5
0.1
0
0
y
−0.1
−0.5
0
0.3
−0.5
0.25
−0.2
−1
−1
−0.3
−1.5
0.2
−1.5
−0.4
−2
−2
−1.5
−1
−0.5
0
x
0.5
1
1.5
−2
−2
2
−1.5
−1
−0.5
0
x
(a)
0.5
1
1.5
2
0.15
(b)
√
Re ψ SC x, y, R2 − x2 − y 2 , R = 10L
10
√
SC
ψ
x, y, R2
− x2 − y 2 , R = 10L
10
0.45
0.4
8
8
0.3
0.4
6
6
0.2
4
4
0.35
0.1
2
y 0
2
y 0
0
−2
−0.1
0.3
−2
0.25
−4
−0.2
−6
−0.3
−8
−4
−6
0.2
−8
−0.4
−10
−10
−8
−6
−4
−2
0
x
2
4
6
8
−10
−10
10
(c)
−8
−6
−4
−2
0
x
2
4
6
8
10
0.15
(d)
Figure 5: Example 1 for the transmission problem with a square system of size 220 × 220
and κ = 1. Real part ((a) and (c)) and magnitude ((b) and (d)) of the scattered field
plotted on hemispheres of radius R = 2L ((a) and (b)) and R = 10L ((c) and (d)) looking
down. Here L = L1 = L2 . The resolution is 100 × 100.
24
Spectral Orders Above the Surface
Spectral Orders Below the Surface
5
5
4
4
3
3
2
2
1
1
j’ 0
j’ 0
−1
−1
−2
−2
−3
−3
−4
−4
−5
−5
−6
−10
−5
j
0
5
−6
−10
−5
0
j
5
(a)
(b)
Scattered Energy: Side View
Scattered Energy: Side View Zoomed
−3
x 10
0.5
0.4
1.5
0.3
0.2
1
0.1
0.5
z 0
z
0
−0.1
−0.5
−0.2
−1
−0.3
−1.5
−0.4
−0.5
−0.5
0
y
0.5
0
x
−0.5
−1.5 −1 −0.5
−3
x 10
(c)
0
y
0.5
1
1.5
1.5
1
0.5
0
x
−0.5 −1
−1.5
−3
x 10
(d)
Figure 6: Example 1 for the transmission problem with a square system of size 220 × 220
and κ = 1. (a) Spectral orders above the surface with 11 samples in j and 10 samples in j .
Stars indicate radiating modes. (b) Spectral orders below the surface with 11 samples in
j and 10 samples in j . (c) and (d) Scattered energy distribution viewed from θ = 90◦ and
φ = −75◦ . Incident field is dashed, reflected field is solid and transmitted field is dotted.
(c) is an unscaled side view and (d) is a zoomed view with scale of 10−3 in both x and y.
25
8.2
Example 2
The results in Table 2 and Figs. 7 and 8 are based on the following surface parameters:
S(x, y) = −(d/2) cos(2πx/L1 ) cos(2πy/L2 ), where L1 = L2 = 1, d/L1 = d/L2 = 0.075,
λ/L1 = λ/L2 = 0.95, ρ = 2, and κ = 1.5. There are 4 radiating orders above the surface
and 7 below the surface. The incident and azimuthal angles are θi = 75◦ and φi = 15◦ .
The fraction of the energy that is reflected is 0.14.
All the examples in Table 2 contain evanescent modes both above and below the surface.
Again fill times, solution times and condition numbers were small and except for the 15×18
system the error numbers were extremely good. There are far fewer radiating modes than
in Example 1, since here the wavelength was approximately equal to the surface periods,
and here the coordinate sampling was much more dense. The coordinate sampling was
increased as the number of evanescent modes were increased but none of the systems were
square. Non-square systems perform as well as square systems. The boundary unknowns
are plotted in Fig. 7 and the scattered field in Fig. 8. The magnitudes and behavior
of these quantities should be compared to those in Figs. 4 and 5. Distinctly different
patterns emerge for different wavelength to period ratios and these could be useful in
remotely identifying surface characteristics.
System
Size
15 × 18
28 × 32
45 × 50
66 × 72
91 × 98
120 × 128
153 × 162
190 × 200
231 × 242
276 × 288
325 × 338
378 × 392
435 × 450
Number of Samples
Coord.
Spectral
Above Below
x y j j j j
3 3 3 2 3 3
4 4 4 3 4 4
5 5 5 4 5 5
6 6 6 5 6 6
7 7 7 6 7 7
8 8 8 7 8 8
9 9 9 8 9 9
10 10 10 9 10 10
11 11 11 10 11 11
12 12 12 11 12 12
13 13 13 12 13 13
14 14 14 13 14 14
15 15 15 14 15 15
λ/∆x
2.8500
3.8000
4.7500
5.7000
6.6500
7.6000
8.5500
9.5000
10.4500
11.4000
12.3500
13.3000
14.2500
λ/∆y
2.8500
3.8000
4.7500
5.7000
6.6500
7.6000
8.5500
9.5000
10.4500
11.4000
12.3500
13.3000
14.2500
Fill
Time (s)
0.0100
0.0300
0.0600
0.0800
0.1200
0.1600
0.2000
0.2700
0.3400
0.4300
0.5200
0.6600
0.8000
Linear
Solution
Time (s)
0.0100
0.0100
0.0300
0.0700
0.1700
0.3600
0.6900
1.3600
2.6100
4.3400
7.7300
13.2400
21.9400
Condition
Number
5.0194
7.5752
8.4449
13.1800
15.9756
23.2795
27.8386
39.0782
46.4069
63.5278
75.0610
106.8442
134.3711
Error
-1.5588
-5.2495
-3.2745
-4.2016
-3.9552
-5.4933
-5.6419
-6.3917
-6.2535
-7.5003
-7.4449
-8.5236
-8.4689
Table 2: Parameters and computational results for Example 2 of the transmission problem.
Spectral modes in both x and y and both above and below the surface are present. The
numbers of modes above and below are different since κ = 1. Additional coordinate samples
were added to make the linear system non-square. For this transmission case the nonsquare systems performed about the same as the square systems. (Computations were
done on a customized Pentium III 500 MHz PC).
26
Re[ψ T (x, y, S(x, y)]
|ψ T (x, y, S(x, y))|
0.5
0.5
0.6
0.4
0.65
0.4
0.4
0.3
0.3
0.64
0.2
0.2
0.2
0.1
y
0.63
0.1
0
0
y
0
0.62
−0.1
−0.1
−0.2
−0.2
−0.2
−0.3
−0.4
0.61
−0.3
0.6
−0.4
−0.4
−0.6
−0.5
−0.5
−0.4
−0.3
−0.2
−0.1
0
x
0.1
0.2
0.3
0.4
−0.5
−0.5
0.5
−0.4
−0.3
−0.2
−0.1
0
x
(a)
0.1
0.2
0.3
0.4
0.5
(b)
|N(x, y, S(x, y))|
Re[N(x, y, S(x, y)]
0.5
0.5
0.4
0.4
0.42
0.4
0.3
0.3
0.3
0.4
0.2
0.2
0.2
0.38
0.1
0.1
y
0
0.1
y
0
−0.1
0.36
0
−0.1
0.34
−0.1
−0.2
−0.2
0.32
−0.2
−0.3
−0.3
−0.3
−0.4
−0.5
−0.5
−0.4
−0.3
−0.2
−0.1
0
x
0.1
0.2
0.3
0.4
−0.5
−0.5
0.5
(c)
0.3
−0.4
−0.4
−0.3
−0.2
−0.1
0
x
0.1
0.2
0.3
0.4
0.5
(d)
Figure 7: Example 2 for the transmission problem with a non-square system of size 435 ×
450 and κ = 1.5. Real part (a) and magnitude (b) of the total field ψ T on the surface
and real part (c) and magnitude (d) of the surface current or normal derivative N on the
surface.
27
√
SC
ψ
x, y, R2
√
Re ψ SC x, y, R2 − x2 − y 2 , R = 2L
2
y
− x2 − y 2 , R = 2L
2
0.39
1.5
0.3
1.5
0.385
1
0.2
1
0.38
0.5
0.1
0.5
0.375
0
0.37
y
0
0
−0.5
−0.1
−0.5
0.365
−1
−0.2
−1
0.36
−1.5
−0.3
−1.5
0.355
−2
−2
−1.5
−1
−0.5
0
x
0.5
1
1.5
−2
−2
2
−1.5
−1
−0.5
0
x
(a)
0.5
1
1.5
2
(b)
√
Re ψ SC x, y, R2 − x2 − y 2 , R = 10L
√
SC
ψ
x, y, R2
10
10
8
8
0.3
6
− x2 − y 2 , R = 10L
0.39
0.385
6
0.2
0.38
4
4
0.1
2
y 0
0.375
2
y 0
0
−2
−0.1
−4
0.37
−2
0.365
−4
0.36
−0.2
−6
−6
−0.3
−8
−10
−10
0.35
−8
−6
−4
−2
0
x
2
4
6
8
−10
−10
10
(c)
0.355
−8
−8
−6
−4
−2
0
x
2
4
6
8
10
0.35
(d)
Figure 8: Example 2 for the transmission problem with a non-square system of size 435 ×
450 and κ = 1.5. Real part ((a) and (c)) and magnitude ((b) and (d)) of the scattered
field plotted on hemispheres of radius R = 2L ((a) and (b)) and R = 10L ((c) and (d))
looking down. Here L = L1 = L2 . The resolution is 100 × 100.
28
8.3
Example 3
The results in Table 3 and Fig. 9 are based on the following surface parameters: S(x, y) =
−(d/2) cos(2πx/L1 ) cos(2πy/L2), where L1 = L2 = 1, d/L1 = d/L2 = 2.5, λ/L1 = λ/L2 =
100, ρ = 2, and κ = 1. The incident and azimuthal angles are θi = 75◦ and φi = 15◦ . The
fraction of the energy that is reflected is 0.11. For this example only two real modes were
present, the scattered mode in specular and the transmitted mode as if no roughness were
present.
In Table 3 it can be seen that the 2 × 2 system with only real propagating modes
worked very well. Adding evanescent modes symmetrically worked well only through one
example (8 × 8). Adding them unsymmetrically (18 × 18) produced poor results. Two
views of this simple system are illustrated in Fig. 5.
Although the parameters of this system yield the immediate conclusion that only two
modes are present, the amplitudes of those modes still must be computed and the surface
slopes are very large.
System
Size
2×2
8×8
18 × 18
Number of Samples
Coord.
Spectral
Above Below
x y j j j j
1 1 1 1 1 1
2 2 2 2 2 2
3 3 3 3 3 3
λ/∆x
100
200
300
λ/∆y
100
200
300
Fill
Time (s)
0.0100
0.0100
0.0200
Linear
Solution Condition
Time (s) Number
Error
< 10−3
6.4572
-15.3525
< 10−3 580.1612 -15.6536
< 10−3 1.6554e+09 -1.4002
Table 3: Parameters and computational results for Example 3 of the transmission problem.
Spectral modes in both x and y and both above and below the surface are present. The
coordinate sampling is the product of the numbers in the columns “x” and “y” then
doubled to cover both reflection and transmission regions. Only square systems were
treated and the wavelength was 100 times larger than the two equal surface periods. This
is a case of near-grazing incidence.
29
Scattered Energy: Side View
Scattered Energy: General View
0.5
0.4
0.5
0.3
0.4
0.3
0.2
0.2
0.1
0.1
z 0
z 0
−0.1
−0.1
−0.2
−0.3
−0.2
−0.4
−0.5
−0.5
−0.3
−0.4
−0.5
−0.5
−0.5
0
0
y
0
x
0.5
0
y
0.5
(a)
0.5 0.5
x
(b)
Figure 9: Example 3 for the transmission problem with a square system of size 8 × 8 and
κ = 1. Scattered energy distribution viewed from (a) θ = 90◦ and φ = −75◦ and (b)
θ = 40◦ and φ = −5◦ . Incident field is dashed, reflected field is solid and transmitted field
is dotted.
30
8.4
Suite of φi Values, Azimuthal Angle of Incidence
In this section we present results of varying φi , the azimuthal angle of incidence, over its full
range (0◦ − 90◦ ) in 5◦ increments. Table 4 and Fig. 10 are based on the following surface
parameters: S(x, y) = −(d/2) cos(2πx/L1 ) cos(2πy/L2 ) where L1 = L2 = 1, d/L1 =
d/L2 = 0.075, λ/L1 = λ/L2 = 0.25, ρ = 2, κ = 1.5, and θi = 20◦ .
Table 4 illustrates the parameters and computational results and in Fig. 10 we present
the results of error and condition number versus φi . All the examples in Table 4 contain
evanescent modes. None of the matrix systems are square. The upper block in the Table
illustrates examples where only a few evanescent modes are added. In the lower block many
more evanescent modes are present. The addition of more evanescent modes increased the
fill time, solution time and condition number but made no appreciable difference in the
error which remained relatively stable over the entire azimuthal variation. This was true
of other examples also [7]. The examples in the plots of Fig. 10 contained either no
evanescent waves or one evanescent mode in each of the forward and backward directions
both above and below the surface. The results are roughly the same as those in Table 4.
The SC method is thus stable and robust over the entire azimuthal variability.
31
Number of Samples
Coord. Spectral Radiating Radiating Fill Linear
System
Above Below Orders
Orders Time Solution Condition
i
Size
φ x y j j j j
Above
Below
(s) Time (s) Number Error
188 × 264 0 12 11 8 7 12 11
50
110
2.4900 22.8200 8.3152 -6.3184
208 × 288 5 12 12 8 8 12 12
51
111
2.7400 37.5800 10.3545 -6.2158
208 × 288 10 12 12 8 8 12 12
51
114
2.6500 38.2400 10.4438 -6.2521
208 × 288 15 12 12 8 8 12 12
50
116
2.8100 37.3700 10.4720 -6.4737
208 × 288 20 12 12 8 8 12 12
51
116
2.7300 38.0900 10.4174 -7.6779
208 × 288 25 12 12 8 8 12 12
50
115
2.6200 39.9500 10.4660 -5.8449
208 × 288 30 12 12 8 8 12 12
51
112
2.6500 37.9700 10.4311 -7.6051
208 × 288 35 12 12 8 8 12 12
50
112
2.8100 37.0300 11.3118 -7.0022
208 × 288 40 12 12 8 8 12 12
48
113
2.6700 38.7700 11.0444 -6.7487
208 × 288 45 12 12 8 8 12 12
47
111
2.6400 38.5300 10.8652 -6.5637
208 × 288 50 12 12 8 8 12 12
48
113
2.8500 36.5900 11.0444 -6.7487
208 × 288 55 12 12 8 8 12 12
50
112
2.6300 38.5300 11.3118 -7.0022
208 × 288 60 12 12 8 8 12 12
51
112
2.6400 39.2000 10.4311 -7.6051
208 × 288 65 12 12 8 8 12 12
50
115
2.8200 37.6300 10.4660 -5.8449
208 × 288 70 12 12 8 8 12 12
51
116
2.7000 37.3900 10.4174 -7.6779
208 × 288 75 12 12 8 8 12 12
50
116
2.6300 39.5700 10.4720 -6.4737
208 × 288 80 12 12 8 8 12 12
51
114
2.6400 38.4500 10.4438 -6.2521
208 × 288 85 12 12 8 8 12 12
51
111
2.7900 37.3400 10.3545 -6.2158
188 × 264 90 11 12 7 8 11 12
50
110
2.3200 20.5900 8.3152 -6.3184
272 × 364 0 14 13 10 9 14 13
50
110
4.0500 76.4100 15.9388 -6.8955
296 × 292 5 14 14 10 10 14 14
51
111
4.3900 105.8800 19.3607 -7.8628
296 × 292 10 14 14 10 10 14 14
51
114
4.5300 104.5200 19.1891 -7.6142
296 × 292 15 14 14 10 10 14 14
50
116
4.3700 103.1300 19.3543 -8.8283
296 × 292 20 14 14 10 10 14 14
51
116
4.5900 103.0700 19.1041 -7.3425
296 × 292 25 14 14 10 10 14 14
50
115
4.3300 103.1300 19.4425 -6.8943
296 × 292 30 14 14 10 10 14 14
51
112
4.3000 103.0300 19.1593 -6.8839
296 × 292 35 14 14 10 10 14 14
50
112
4.3600 102.4400 20.2358 -6.5479
296 × 292 40 14 14 10 10 14 14
48
113
4.6000 103.7500 20.0768 -6.7477
296 × 292 45 14 14 10 10 14 14
47
111
4.3400 104.7000 19.9000 -6.9865
296 × 292 50 14 14 10 10 14 14
48
113
4.4400 103.6500 20.0768 -6.7477
296 × 292 55 14 14 10 10 14 14
50
112
4.3800 101.6900 20.2358 -6.5479
296 × 292 60 14 14 10 10 14 14
51
112
4.5800 103.1800 19.1593 -6.8839
296 × 292 65 14 14 10 10 14 14
50
115
4.3200 104.0700 19.4425 -6.8943
296 × 292 70 14 14 10 10 14 14
51
116
4.2900 104.5800 19.1041 -7.3425
296 × 292 75 14 14 10 10 14 14
50
116
4.4900 98.1500 19.3543 -8.8283
296 × 292 80 14 14 10 10 14 14
51
114
4.5200 102.1400 19.1891 -7.6142
296 × 292 85 14 14 10 10 14 14
51
111
4.2200 99.0300 19.3607 -7.8628
272 × 364 90 13 14 9 10 13 14
50
110
3.8800 75.2700 15.9388 -6.8955
Table 4: Parameters and computational results for parameters mostly similar to those
of Example 1 of the transmission problem for different values of the azimuthal angle
of incidence φi , in 5◦ increments, and using different spectral and coordinate sampling
schemes. The error numbers were roughly uniform over the full azimuthal range and for
all the different sampling schemes.
32
Error vs. φi
−5.5
−6
−6.5
error
−7
−7.5
−8
−8.5
−9
0
10
20
30
40
50
φi (deg)
60
70
80
90
(a)
Condition Number vs. φi
22
20
condition number
18
16
14
12
10
8
0
10
20
30
40
50
φi (deg)
60
70
80
90
(b)
Figure 10: (a) Error and (b) condition number vs. φi , the azimuthal angle of incidence
for Example 1 of the transmission problem. Solid lines mean no added non-radiating rows
or columns, and dotted lines mean one added non-radiating row and column on all sides
above the surface and below the surface. Error is down by approximately six orders of
magnitude over the entire azimuthal angular variability.
33
8.5
Suite of κ Values
In this section we present results of varying κ = k2 /k1 , the ratio of wavenumbers, ranging
from 0.1 to about 5. Table 5 and Fig. 11 are based on the following surface parameters:
S(x, y) = −(d/2) cos(2πx/L1 ) cos(2πy/L2 ) where L1 = L2 = 1, d/L1 = d/L2 = 0.02,
λ/L1 = λ/L2 = 0.70, ρ = 2, θi = 20◦ , and φi = 15◦ . The number of radiating orders above
the surface is 6.
Table 5 illustrates the parameters and computational results and in Fig. 11 we present
the results of error and fraction of energy reflected versus κ. Here the results in the Table
and the Figure correspond. The parameter κ varies over a factor of 50. In the upper part
of Table 5 no added evanescent modes are included. This resulted in moderately good
error checks. In the lower part of Table 5 on eevanescent mode was added in both forward
and backward directions and both above and below the surface. The latter yielded better
error checks. The upper and lower parts of Table 5 are plotted in Fig. 11(a). In Fig.
11(b) we illustrate an example of a reflectionless surface. The SC method is thus stable
and robust over a 50-fold change in values of the wavenumber ratio.
34
Number of Samples Fraction
Coord. Spectral
of Radiating Fill Linear
System
Above Below Energy Orders Time Solution Condition
Size
κ
x y j j j j Reflected Below
(s) Time (s) Number Error
7 × 12 0.1000 2 3 2 3 1 1 1.0000
0
0.0700 0.0200 2.7807 -2.3049
7 × 12 0.1259 2 3 2 3 1 1 1.0000
0
0.0700 0.0100 2.7801 -2.2798
7 × 12 0.1585 2 3 2 3 1 1 1.0000
0
0.0700 0.0200 2.7791 -2.2369
7 × 12 0.1995 2 3 2 3 1 1 1.0000
0
0.0700 0.0100 2.7776 -2.1594
7 × 12 0.2512 2 3 2 3 1 1 1.0000
0
0.0600 0.0100 2.7751 -2.0006
7 × 12 0.3162 2 3 2 3 1 1 1.0000
0
0.0700 0.0200 2.7713 -1.4946
8 × 12 0.3981 2 3 2 3 2 1 0.6511
2
0.0700 0.0100 2.5972 -1.9012
8 × 12 0.5012 2 3 2 3 2 1 0.4557
2
0.0800 0.0200 2.3059 -2.4285
8 × 12 0.6310 2 3 2 3 2 1 0.3144
2
0.0800 0.0200 2.1262 -2.7674
10 × 12 0.7943 2 3 2 3 2 2 0.2007
4
0.1000 0.0200 2.8825 -3.3906
12 × 12 1.0000 2 3 2 3 2 3 0.1112
6
0.1200 < 10−3 3.4941 -4.8057
18 × 24 1.2589 4 3 2 3 4 3 0.0502
10
0.1800 0.0400 2.9246 -2.7676
26 × 40 1.5849 4 5 2 3 4 5 0.0095
16
0.2700 0.1000 2.7249 -4.1560
36 × 60 1.9953 6 5 2 3 6 5 0.0005
26
0.3900 0.2200 2.7497 -3.9722
62 × 112 2.5119 8 7 2 3 8 7 0.0194
41
0.7000 1.2000 2.9692 -3.6141
87 × 162 3.1623 9 9 2 3 9 9 0.0632
62
1.0600 3.2600 3.3818 -3.3691
138 × 264 3.9811 12 11 2 3 12 11 0.1272
102 1.7800 15.1900 4.0906 -3.1805
216 × 420 5.0119 14 15 2 3 14 15 0.2054
162 3.7400 85.6100 5.4669 -3.0325
29 × 40 0.1000 4 5 4 5 3 3 1.0000
0
0.2700 0.1300 4.4465 -5.3817
29 × 40 0.1259 4 5 4 5 3 3 1.0000
0
0.2800 0.1300 4.4499 -5.3510
29 × 40 0.1585 4 5 4 5 3 3 1.0000
0
0.2600 0.1300 4.4553 -5.3013
29 × 40 0.1995 4 5 4 5 3 3 1.0000
0
0.2900 0.1400 4.4640 -5.2183
29 × 40 0.2512 4 5 4 5 3 3 1.0000
0
0.2800 0.1300 4.4780 -5.0681
29 × 40 0.3162 4 5 4 5 3 3 1.0000
0
0.2800 0.1300 4.5008 -4.6845
32 × 40 0.3981 4 5 4 5 4 3 0.6470
2
0.3000 0.1400 4.6656 -5.2144
32 × 40 0.5012 4 5 4 5 4 3 0.4540
2
0.3000 0.1400 4.7354 -5.3304
32 × 40 0.6310 4 5 4 5 4 3 0.3137
2
0.3000 0.1400 4.8686 -5.3351
36 × 40 0.7943 4 5 4 5 4 4 0.2006
4
0.3300 0.1600 5.5010 -5.5439
40 × 40 1.0000 4 5 4 5 4 5 0.1109
6
0.4300 0.0500 7.4499 -6.3845
50 × 60 1.2589 6 5 4 5 6 5 0.0465
10
0.5500 0.3700 7.7222 -5.9901
62 × 84 1.5849 6 7 4 5 6 7 0.0093
16
0.7000 0.7600 6.2782 -7.2055
76 × 112 1.9953 8 7 4 5 8 7 0.0005
26
0.8800 1.4900 5.5584 -6.0970
110 × 180 2.5119 10 9 4 5 10 9 0.0194
41
1.4200 4.8200 6.1465 -7.2767
141 × 242 3.1623 11 11 4 5 11 11 0.0633
62
1.7400 12.4800 6.4060 -6.4826
202 × 364 3.9811 14 13 4 5 14 13 0.1274
102 3.3600 55.9600 7.4543 -6.2676
292 × 544 5.0119 16 17 4 5 16 17 0.2056
162 5.5500 267.6600 9.2238 -6.1307
Table 5: Parameters and computational results for the transmission problem for a suite of
values of κ = k2 /k1 , the ratio of wavenumbers. Different coordinate and spectral sampling
schemes are presented, nearly all for non-square systems. The upper part of the table
is plotted as the solid line in Fig. 11(a) and includes no added non-radiating rows and
columns. The lower part of the table (dotted line in Fig. 11(a)) consists of one added
non-radiating row and column on all sides of the matrix both above and below the surface
which improved the error numbers.
35
−1
−2
−3
Error
−4
−5
−6
−7
−8
0
1
2
κ
3
4
5
6
4
5
6
(a)
1
0.9
Fraction of Energy Reflected
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
0
1
2
κ
3
(b)
Figure 11: (a) Error vs. κ for the transmission problem. The surface parameters are listed
in Table 5. Solid line refers to no added non-radiating rows or columns. The dotted line
corresponds to one added non-radiating row and column on all sides above the surface and
below the surface. (b) Shows the fraction of reflected energy vs. κ, with no added nonradiating rows or columns. The minimum of the curve illustrates an example of perfect
transmission.
36
8.6
Suite of ρ Values
In this section we present results of varying ρ, ranging from 0.1 to 10. Table 6 and Fig. 12
are based on the following surface parameters: S(x, y) = −(d/2) cos(2πx/L1 ) cos(2πy/L2)
where L1 = L2 = 1, d/L1 = d/L2 = 0.075, λ/L1 = λ/L2 = 0.25, κ = 1.5, θi = 20◦ , and
φi = 15◦ . The number of radiating orders above and below the surface is 48 and 116,
respectively.
Table 6 illustrates the parameters and computational results and in Fig. 12 we present
the results of error and fraction of energy reflected versus ρ. All the examples in the Table
contain many evanescent modes whereas the results in the Figure have no evanescent modes
(Fig. 12(a)) or only one added evanescent mode in each of the forward and backward
directions and in both regions. The parameter ρ varies over two orders of magnitude. The
condition number is generally slightly higher than that observed for the azimuthal angle
variability (see Table 4) or the wavenumber ratio variability (see Table 5) but was still
smaller than the order of the system. Excellent error results were observed for all values
of ρ. The error results are plotted in Fig. 12(a) for either no evanescent modes or the
small number of added modes described above. The fraction of reflected energy is plotted
in Fig. 12(b) and we observe an example of a reflectionless surface. The SC method is
thus a stable and robust computational method for density variablity over two orders of
magnitude.
37
System
Size
208 × 288
208 × 288
208 × 288
208 × 288
208 × 288
208 × 288
208 × 288
208 × 288
208 × 288
208 × 288
208 × 288
208 × 288
208 × 288
208 × 288
208 × 288
208 × 288
208 × 288
208 × 288
208 × 288
208 × 288
208 × 288
296 × 392
296 × 392
296 × 392
296 × 392
296 × 392
296 × 392
296 × 392
296 × 392
296 × 392
296 × 392
296 × 392
296 × 392
296 × 392
296 × 392
296 × 392
296 × 392
296 × 392
296 × 392
296 × 392
296 × 392
296 × 392
ρ
0.1000
0.1259
0.1585
0.1995
0.2512
0.3162
0.3981
0.5012
0.6310
0.7943
1.0000
1.2589
1.5849
1.9953
2.5119
3.1623
3.9811
5.0119
6.3096
7.9433
10.0000
0.1000
0.1259
0.1585
0.1995
0.2512
0.3162
0.3981
0.5012
0.6310
0.7943
1.0000
1.2589
1.5849
1.9953
2.5119
3.1623
3.9811
5.0119
6.3096
7.9433
10.0000
Number of Samples Fraction
Coord.
Spectral
of
Fill
Linear
Above Below Energy Time Solution
x y j j j j Reflected (s) Time (s)
12 12 8 8 12 12 0.7742 2.9800 36.2500
12 12 8 8 12 12 0.7244 2.8700 37.6600
12 12 8 8 12 12 0.6661 2.6100 37.4000
12 12 8 8 12 12 0.5989 2.7000 38.7600
12 12 8 8 12 12 0.5234 2.6700 39.2400
12 12 8 8 12 12 0.4408 2.6000 39.6700
12 12 8 8 12 12 0.3535 2.6000 36.2500
12 12 8 8 12 12 0.2653 2.6300 35.8800
12 12 8 8 12 12 0.1812 2.6400 37.7000
12 12 8 8 12 12 0.1070 2.6400 38.6400
12 12 8 8 12 12 0.0488 2.6000 38.0600
12 12 8 8 12 12 0.0120 2.6400 40.2300
12 12 8 8 12 12 0.0002 2.6100 37.3900
12 12 8 8 12 12 0.0146 2.6500 39.1700
12 12 8 8 12 12 0.0538 2.6300 42.0300
12 12 8 8 12 12 0.1137 2.6300 39.1600
12 12 8 8 12 12 0.1890 2.6300 37.7000
12 12 8 8 12 12 0.2735 2.8800 37.3500
12 12 8 8 12 12 0.3615 2.8200 36.6500
12 12 8 8 12 12 0.4483 2.6300 40.9900
12 12 8 8 12 12 0.5301 2.7000 38.7200
14 14 10 10 14 14 0.7742 4.3700 106.7200
14 14 10 10 14 14 0.7244 4.3800 106.8200
14 14 10 10 14 14 0.6660 4.6800 103.5800
14 14 10 10 14 14 0.5989 4.8000 104.7600
14 14 10 10 14 14 0.5234 4.6800 106.9500
14 14 10 10 14 14 0.4408 4.3800 103.8200
14 14 10 10 14 14 0.3535 4.6300 105.0700
14 14 10 10 14 14 0.2653 4.3100 108.5700
14 14 10 10 14 14 0.1811 4.5000 105.2700
14 14 10 10 14 14 0.1070 4.3400 106.6100
14 14 10 10 14 14 0.0488 4.8200 103.8400
14 14 10 10 14 14 0.0120 4.3800 106.3500
14 14 10 10 14 14 0.0002 4.3900 106.1300
14 14 10 10 14 14 0.0146 4.5200 104.7200
14 14 10 10 14 14 0.0537 4.3800 104.3800
14 14 10 10 14 14 0.1136 4.4100 105.8700
14 14 10 10 14 14 0.1888 4.3700 104.3100
14 14 10 10 14 14 0.2733 4.3700 106.2200
14 14 10 10 14 14 0.3612 4.5400 101.2500
14 14 10 10 14 14 0.4478 4.9800 106.2900
14 14 10 10 14 14 0.5296 4.3400 106.1900
Condition
Number
16.9260
15.2338
13.3747
11.4855
9.6972
8.1086
6.9839
6.3893
5.9837
5.6171
5.3084
6.2400
7.8840
10.4389
14.4321
20.5077
29.6333
43.0853
62.4316
89.4511
126.0280
38.2908
34.2838
29.9761
26.7792
23.9234
20.8751
17.9190
15.2993
13.6450
12.9722
12.3741
12.8357
15.2528
19.3033
25.7208
35.9192
51.5533
75.2297
110.4746
161.7675
234.3887
Error
-4.9444
-4.9919
-5.0543
-5.1375
-5.2511
-5.4128
-5.6627
-6.1587
-6.3934
-5.9992
-5.9485
-6.0001
-6.0610
-6.4576
-5.5776
-4.9103
-4.4868
-4.2055
-4.0380
-3.9742
-4.0219
-5.7059
-5.7338
-5.7703
-5.8174
-5.8772
-5.9496
-6.0297
-6.1039
-6.1529
-6.1726
-6.1912
-6.2625
-6.4863
-8.3088
-6.6114
-7.4531
-5.7810
-5.2654
-4.9484
-4.7560
-4.6631
Table 6: Parameters and computational results for parameters mostly similar to Example
1 of the transmission problem for different values of ρ ranging from 0.1 to 10. Different
spectral and coordinate sampling schemes are included. Slightly higher condition numbers
occur (compare Tables 4 and 5) than for angle and wavenumber suites.
38
−3.5
−4
−4.5
−5
Error
−5.5
−6
−6.5
−7
−7.5
−8
−8.5
0
1
2
3
4
5
ρ
6
7
8
9
6
7
8
9
10
(a)
0.8
0.7
Fraction of Energy Reflected
0.6
0.5
0.4
0.3
0.2
0.1
0
0
1
2
3
4
5
ρ
10
(b)
Figure 12: (a) Error vs. ρ for the transmission problem. The surface parameters are listed
in Table 6. Solid line refers to no added non-radiating rows or columns. The dotted line
corresponds to one added non-radiating row and column on all sides above the surface
and below the surface. (b) Shows the fraction of reflected energy vs. ρ, with one added
non-radiating row and column on all sides above the surface and below the surface. The
minimum of the curve is an example of perfect transmission.
39
8.7
Maximum Roughness with Respect to Incident Polar Angle
θi
In this section we present results of varying θi , the polar angle, over its full range (0◦ −90◦ )
in 5◦ increments. Table 7 and Fig. 13 are based on the following surface parameters:
S(x, y) = −(d/2) cos(2πx/L1 ) cos(2πy/L2) where L1 = L2 = 1, λ/L1 = λ/L2 = 0.25, ρ =
κ = 1.5, and φi = 50◦ .
Table 7 illustrates the parameters and in Fig. 13 we present maximum roughness (d/L)
versus θi . It can be seen that the maximum roughness remains fairly stable over most of
the full range of polar angles independent of the sampling scheme but then actually increases as grazing incidence is approached. A similar effect was noted for one-dimensional
surfaces [11] and for two-dimensional perfectly reflecting surfaces [9]. The SC method
works extremely well under near grazing conditions.
Line Type
Dash Dot
Solid
Dashed
Added Spectral Orders
Above Surface Below Surface
L R T B L R T B
0 0 0 0 0 0 0 0
0 1 0 1 0 1 0 1
1 1 1 1 1 1 1 1
Table 7: Parameters for Fig. 13, the maximum roughness (d/L) with respect to polar
incident angle θi for the transmission problem and a fixed error less than −2. The box of
added spectral orders refers to added columns (L = left, R = right) and added rows (T =
top, B = bottom).
40
3.5
3
2.5
2
d/L
1.5
1
0.5
0
0
10
20
30
40
50
i
θ (deg)
60
70
80
90
Figure 13: Maximum roughness (d/L) with respect to polar incident angle θi for the
transmission problem and a fixed error less than −2. The curves are explained in Table 7.
41
8.8
Maximum Roughness with Respect to ρ
In this section we give results of maximum roughness versus ρ, varying from 0.1 to 10.
Table 8 and Fig. 14 are based on the surface S(x, y) = −(d/2) cos(2πx/L1 ) cos(2πy/L2),
with parameters L1 = L2 = 1, λ/L1 = λ/L2 = 0.7, κ = 2, and φi = 15◦ for four different
polar angles of incidence.
In Table 8 we list the choices for angle θi . In Fig. 14 we present the results of maximum
roughness versus ρ. Several large peaks in maximum roughness can be observed which
extend over a broad density range. The full density variability extends over two orders of
magnitude.
Angle θi
.01◦
20◦
50◦
75◦
Line Type
Dash Dot
Solid
Dashed
Dotted
Table 8: Parameters for Fig. 14, to compute the maximum roughness d/L (L = L1 = L2 )
with respect to the ratio of densities ρ for four different polar angles θi of incidence. The
computations include one added row and column of non-radiating orders on all sides, above
and below the surface. The fixed error is less than −2.
0.5
0.45
0.4
0.35
0.3
d/L
0.25
0.2
0.15
0.1
0.05 −1
10
0
10
ρ
1
10
Figure 14: Maximum roughness for error less than −2 with respect to ρ at different values
of incident polar angle θi for the transmission problem. The curves are defined in Table 8.
42
8.9
Maximum Roughness with Respect to ρ at Near-Grazing
Incidence
In this section we again present results of maximum roughness versus ρ (varying from
0.1 to 10), but at near-grazing incidence θi = 89.99◦ . Table 9 and Fig. 15 are based
on the following surface parameters: S(x, y) = −(d/2) cos(2πx/L1 ) cos(2πy/L2) where
L1 = L2 = 1, λ/L1 = λ/L2 = 0.7, κ = 2, and φi = 15◦ .
In Table 9 we list the parameters and in Fig. 15 we present the results of maximum
roughness versus ρ for fixed error less than −2. It can be seen that under extreme neargrazing conditinos it is possible to compute the scattering within fixed error for extremely
rough surfaces. This is further evidence of the effiency of the SC method under these
conditions.
Line Type
Dash Dot
Solid
Dashed
Dotted
System
Size
45 × 72
65 × 98
89 × 128
117 × 162
Added Spectral Orders
Above Surface Below Surface
L R T B L R T B
0 0 0 0 0 0 0 0
0 1 0 1 0 1 0 1
1 1 1 1 1 1 1 1
1 2 1 2 1 2 1 2
Table 9: Parameters for Fig. 15, to compute the maximum roughness d/L (L = L1 = L2 )
with respect ρ for fixed error less than −2 and for near grazing incidence (θi = 89.99◦ ). The
table for the four curves plotted in Fig. 15 indicates the system size with added spectral
orders above the surface (added columns: L = left, R = right, and added rows: T = top
and B = bottom) with an analogous interpretation for added spectral orders below the
surface.
43
11
10
9
8
7
d/L
6
5
4
3
2 −1
10
0
10
ρ
1
10
Figure 15: Maximum roughness for error less than −2 with respect to ρ at θi = 89.99◦
for the transmission problem. The curves are explained in Table 9. Very large values of
roughness can be routinely computed as the polar angle of incidence approaches grazing.
44
8.10
Maximum Roughness with Respect to κ
In this section we present results of maximum roughness vs. κ (ranging from 0.1 to 10).
Table 10 and Fig. 16 are based on surface S(x, y) = −(d/2) cos(2πx/L1 ) cos(2πy/L2 ), with
parameters L1 = L2 = 1, λ/L1 = λ/L2 = 0.7, ρ = 2, and φi = 15◦ for four different polar
angles of incidence.
In Table 10 we list our selection of angles θi and in Fig. 16 we present the results of
maximum roughness versus κ for fixed error less than −2. The results for 0.01◦ and 20◦
are essentially the same. Within this fixed error large roughness values could be computed
over a 50-fold variation in the wavenumber ratio (see Table 5 also). Note that the region
κ < 1 inverts the transmission problem in the sense that the incident wave is in the
medium with the large wavenumber.
Line Type
Dash Dot (overlaps Solid)
Solid
Dashed
Dotted
Angle θi
.01◦
20◦
50◦
75◦
Table 10: Parameters for the maximum roughness d/L (L = L1 = L2 ) for the transmission
problem with respect to κ at four different angles of incidence for error less than −2. One
added row and column of non-radiating orders was included on all sides, both above and
below the surface. The results are plotted in Fig. 16.
45
0.28
0.26
0.24
0.22
d/L 0.2
0.18
0.16
0.14
0.12
0.1 −1
10
0
10
κ
Figure 16: Maximum roughness d/L (L = L1 = L2 ) for the transmission problem as a
function of κ for fixed error less than −2 at four different values of the polar incident angle
θi . See Table 10 for the explanation of the curves.
46
8.11
Maximum Roughness with Respect to κ at Near-Grazing
Incidence
In this section we present results of maximum roughness versus κ (varying from 0.1 to
10), but at near-grazing incidence θi = 89.99◦. Table 11 and Fig. 17 are based on the
following surface parameters: S(x, y) = −(d/2) cos(2πx/L1 ) cos(2πy/L2 ) where L1 = L2 =
1, λ/L1 = λ/L2 = 0.7, ρ = 2, and φi = 15◦ . The number of radiating orders above the
surface is 6.
In Table 11 we list the parameters; in Fig. 17 we present the results of maximum
roughness versus κ for fixed error less than −2 and the four sampling schemes in Table
11. Note the difference in vertical scale between Figs. 15 and 16. At extreme near-grazing
conditions the SC method is able to routinely compute the scattering from very rough
surfaces over a 50-fold change in the wavenumber parameter (see Table 5 also).
Line Type
Dash Dot
Solid
Dashed
Dotted
Added Spectral Orders
Above Surface Below Surface
L R T B L R T B
0 0 0 0 0 0 0 0
0 1 0 1 0 1 0 1
1 1 1 1 1 1 1 1
1 2 1 2 1 2 1 2
Table 11: Parameters for the maximum roughness d/L (L = L1 = L2 ) for the transmission
problem with respect to κ for four different sampling schemes and for fixed error is less
than −2 at near-grazing incidence (θi = 89.99◦ ). The added spectral orders refer to added
columns (L = left, R = right) and added rows (T = top, B = bottom) both above and
below the surface.
47
12
10
8
d/L 6
4
2
0 −1
10
0
κ
10
Figure 17: Maximum roughness for error less than −2 with respect to κ at θi = 89.99◦ for
the transmission problem. Added columns (L = left, R = right) and added rows (T = top,
B = bottom). Note the vertical scale. Very large values of roughness could be obtained
at near-grazing incidence. The curves are defined in Table 11.
48
9
Summary and Conclusions
We presented theoretical and computational results to describe the scattering from and
transmission through a two-dimensional periodic surface. The equations used to describe
the scattering process were found using a reduction of the equations for an infinite surface.
They were in a mixed spectral-coordinate (SC) representation.
Calculations were presented for the full transmission case where the rough interface
separates two different homogeneous media. The computations, involved not only surfaces
of different roughness under conditions of near-grazing incidence and reflection, but also
parameter studies over several orders of magnitude for density and wavenumber ratios as
well as considerable variability in the incident angles. Examples of reflectionless surfaces
were presented.
Several conclusions are possible. The method is very fast as evidenced by the fill time
of the matrix. Additional time savings can occur if different matrix solution methods are
employed. We only used Gaussian (row reduction) or pseudo-inverse methods. Practically,
most computations produced a lower error when the systems involved were square. The
methods is robust and stable as evidenced by the breath of parameter values we have
computed. Specifically, the SC method is stable and robust (a) over the entire incident
azimuthal angle variably, (b) over a 50-fold change in values of the wavenumber ration, and
(c) as the density parameter varies over two orders of magnitude. In addition, SC works
extremely well under near-grazing conditions even for very rough surfaces with large slopes
and over an extensive parameter range in density and wavenumber. The results presented
here are a representative sample of far more extensive computations in [8].
Acknowledgements
Effort sponsored by the Air Force Office of Scientific Research, Air Force Materials
Command, USAF, under the Multi-University Research Initiative (MURI) program Grant
# F49620-96-1-0039.
Erdmann’s research was supported in part by an Undergraduate Research Grant from
the Colorado Advanced Software Institute (CASI) and a Grant-in-Aid of Research from
Sigma Xi, The Scientific Research Society.
We are grateful to Mr. Guy Somberg and Mr. Douglas Baldwin for technical assistance
in the production of this paper.
References
[1] Berkoff A.P., Thijssen J.M., and van den Berg P.M., Ultrasound wave propagation
through interfaces: Iterative methods. J. Acoust. Soc. Am. 99, 1306–1314 (1996).
[2] Boag A., Leviatan Y., and Boag A., Analysis of electromagnetic scattering from
doubly periodic nonplanar surfaces using a patch-current model. IEEE Trans. AP41, 732–738 (1993).
[3] DeSanto J.A., Scattering from a perfectly reflecting arbitrary periodic surface: An
exact theory, Radio Sci. 16, 1315–1326 (1981).
49
[4] DeSanto J.A., Exact spectral formalism for rough-surface scattering, J. Opt. Soc. Am.
A 2, 2202–2207 (1985).
[5] DeSanto J.A., A new formulation of electromagnetic scattering from rough dielectric
interfaces, J. Elect. Waves and Applications 1, 1293–1306 (1993).
[6] DeSanto J.A., Scattering from Rough Surfaces, in Scattering, R. Pike and P. Sabatier,
eds., Academic Press, New York (2001) in press.
[7] DeSanto J.A., Erdmann G., Hereman W., and Misra M., Theoretical and Computational Aspects of Scattering from Rough Surfaces: One-dimensional Perfectly Reflecting Surfaces, Technical Report MCS-97-09, Department of Mathematical and
Computer Sciences, Colorado School of Mines, Golden, Colorado (1997).
[8] DeSanto J.A., Erdmann G., Hereman W., Krause B., Misra M., and Swim E.,
Theoretical and Computational Aspects of Scattering from Rough Surfaces: Twodimensional Surfaces, Technical Report MCS-00-03, Department of Mathematical
and Computer Sciences, Colorado School of Mines, Golden, Colorado (2000).
[9] DeSanto J.A., Erdmann G., Hereman W., Krause B., Misra M., and Swim E.,
Theoretical and Computational Aspects of Scattering from Rough Surfaces: Twodimensional Perfectly Reflecting Surfaces Using the Spectral-Coordinate Method,
submitted to Waves in Random Media (2000).
[10] DeSanto J.A., Erdmann G., Hereman W., and Misra M., Theoretical and Computational Aspects of Scattering from Rough Surfaces: One-dimensional Transmission
Interface, Technical Report MCS-00-02, Department of Mathematical and Computer
Sciences, Colorado School of Mines, Golden, Colorado (2000).
[11] DeSanto J.A., Erdmann G., Hereman W., and Misra M., Theoretical and Computational Aspects of Scattering from Rough Surfaces: One-dimensional Transmission
Interface, submitted to Waves in Random Media (2000).
[12] DeSanto J.A., Erdmann G., Hereman W., and Misra M., Theoretical and computational aspects of scattering from rough surfaces: One-dimensional perfectly reflecting
surfaces, Waves in Random Media 8, 385–414 (1998).
[13] Kim M.-J., Berenyi H.M., and Burge R.E., Scattering of scalar waves by twodimensional gratings of arbitrary shape: application to rough surfaces at near-grazing
incidence. Proc. R. Soc. Lond. A 446, 289–308 (1994).
[14] Pak K., Tsang L., and Johnson J., Numerical simulations and backscattering enhancement of electromagnetic waves from two-dimensional dielectric random rough
surfaces with the sparse-matrix canonical grid method. J. Opt. Soc. Am. A 14, 1515–
1529 (1997).
[15] Tran P., and Maradudin A.A., The scattering of electromagnetic waves from a randomly rough 2D metallic surface. Opt. Comm. 110, 269–273 (1994).
50
[16] Wagner R.L, Song J., and Chew W.C., Monte Carlo simulation of electromagnetic
scattering from two-dimensional random rough surfaces, IEEE Trans. AP 45, 235–245
(1997).
51