Surface Science 554 (2004) 222–232
www.elsevier.com/locate/susc
Orientation dependence of the stiffness of surface steps:
an analysis based on anisotropic elasticity
V.B. Shenoy *, C.V. Ciobanu
Division of Engineering, Brown University, Box D, Providence, RI 02912, USA
Received 31 October 2003; accepted for publication 27 January 2004
Abstract
Motivated by recent experimental work that shows that the orientation dependence of the stiffness of steps on Cu
surfaces differs significantly from the predictions of Ising and solid-on-solid modes, we study the effect of elastic
anisotropy on the stiffness of steps on (1 0 0), (1 1 0) and (1 1 1) surfaces of cubic materials. The contribution to the
stiffness due to elastic relaxation is obtained from a regularized continuum model similar to the Peierls–Nabarro model,
which is commonly used to study the energetics of dislocations in crystals. Our analysis shows that while the difference
the corresponding
in the elastic self-energy of steps between the soft and hard orientations is only about 5 meV/A,
The latter estimate is found to compare favorably with the
difference in stiffness can be as large as 50–100 meV/A.
experimental data on Cu(0 0 1) surfaces.
Ó 2004 Elsevier B.V. All rights reserved.
Keywords: Green’s function methods; Stepped single crystal surfaces; Surface structure, morphology, roughness, and topography;
Copper
1. Introduction
Self-organized surface nanostructures hold the
promise for manufacture of micro-electronic devices and structures with unprecedented performance characteristics. While several mechanisms
for self-assembling processes through kinetic
instabilities and equilibrium phenomena on surfaces have been identified, the task of actually
fabricating these devices reproducibly remains an
engineering challenge. Further progress in this
direction will, at least in part, depend on the ability
*
Corresponding author. Tel.: +1-401-8631475; fax: +1-4018639025.
E-mail address: shenoyv@engin.brown.edu (V.B. Shenoy).
to accurately measure and compute kinetic
parameters such as adatom diffusion coefficients
and step-edge barriers, as well as energetic driving
forces obtained from orientation dependent surface and step energies. While novel experimental
techniques and the availability of fast computers
have provided important insights into atomic-scale
mechanisms that play a role in determining the
structure and stability of nanostructures, close
agreement between measurements of kinetic and
thermodynamic parameters and theory/computations has only been achieved for relatively few
material systems.
Recently Dieluweit and coworkers [1] investigated the orientation dependence of the stiffness of
the surface steps on Cu(0 0 1) surfaces and found
0039-6028/$ - see front matter Ó 2004 Elsevier B.V. All rights reserved.
doi:10.1016/j.susc.2004.01.060
V.B. Shenoy, C.V. Ciobanu / Surface Science 554 (2004) 222–232
that the Ising and the solid-on-solid (SOS) models
fail to describe the experimental data over a large
range of angles that they analyzed. This observation has significant consequences for the fabrication of nanostructures where steps act as growth
fronts, since fluctuations of the advancing steps are
controlled by their stiffness. Also, in situations
where a straight step becomes unstable during
growth due to the Bales–Zangwill [2], the kinkrounding [3] or the strain-driven meandering
instabilities [4], the wavelength of the fastest
growing mode of meandering is determined by the
stiffness of the steps. It is therefore important to
understand the reasons for the disagreement between experimental observations and widely used
theoretical models that are based on near-neighbor
interactions.
In their paper, Dieluweit et al. [1] have noted
that models that go beyond the near-neighbor
interactions, by including short-range interactions
with other atoms within a finite cut-off distance,
cannot explain the trends in the experimental results. They, however, point out that a consistent
picture can perhaps be obtained if long-range
interactions are included in the analysis. Such longrange interactions are usually mediated by elastic
deformations [5] or are attributed to the presence of
electric-dipoles in the vicinity of steps and kinks [6].
In the case of anisotropic materials, the elastic
fields of surface steps will depend on their orientation: steps aligned along soft-elastic directions
can achieve larger relaxation of the atoms at their
edges. Similar arguments for the dependence of
stiffness on orientation can also be made for the
case of electrical interactions. In this paper we
present an analysis of the orientation dependence
of the stiffness of steps on (0 0 1), (1 1 0) and (1 1 1)
surfaces of cubic materials due to anisotropy in
elastic properties. We estimate difference in the
stiffness of the steps aligned along the soft and hard
which is comparaorientations to be 50 meV/A,
ble to the deviations of the experimental results
from the Ising or SOS estimates.
In the case of isotropic elastic materials, the
elastic fields of surface steps were first obtained by
Marchenko and Parshin (MP) [5] by modeling the
steps as force-dipoles. Their work shows that the
stress field of a step decays as the inverse-square of
223
the distance from the location of the step. Within
linear elasticity, the elastic self-energy of the step,
however, does not converge due to the singular
nature of the stress fields in the vicinity of the step.
A similar situation occurs in the case of dislocations [7], where regularization methods such as the
Peierls–Nabarro models [7,8] have been successfully employed to obtain the self-energy of the
dislocations. The parameters that regularize the
divergences in such models are obtained from
atomic-scale calculations, where the atomic-displacements and stresses do not diverge in the
‘‘core’’ of the dislocation. In the present work, we
extend the classic model of Marchenko and Parshin in two ways: First, we introduce a regularized
model that leads to displacement fields that are
well-behaved at the edge of the step and yield the
expected dipolar decay at larger distances from the
step-edge. The regularization procedure contains a
phenomenological length parameter, which is of
the order of the height of the step and can be extracted using atomic-scale calculations. Second,
using the surface Green’s functions derived by
Ting [9], we provide a general framework for
obtaining the stress-fields and the self-energy of
the steps in anisotropic crystals. The elastic selfenergy of the steps is then used to obtain numerical
estimates for the orientation dependence of the
stiffness of steps in cubic crystals.
The paper is organized in the following way: In
Section 2, we introduce a regularized model for the
elastic field of surface steps in anisotropic crystals.
The results of this section are used to derive the
orientation dependence of the elastic self-energy
and the stiffness of steps on cubic crystals in Section 3. In Section 4, we provide numerical estimates for the stiffness of steps on (1 0 0), (1 1 0) and
(1 1 1) surfaces of Cu as a function of their orientation. A summary of the results and directions of
future work are given in Section 5. The array of
elastic constants and the surface Green’s functions
used in our analysis are given in the appendices.
2. Elastic relaxation of a surface step
In this section, we introduce a continuum model,
similar to the celebrated Peierls–Nabarro (PN)
224
V.B. Shenoy, C.V. Ciobanu / Surface Science 554 (2004) 222–232
x2
bel ¼
1
2
þ
Z
Cijkl ui;j ðxÞuk;l ðxÞ dx
R
Z
ð2Þ
sðsÞðsÞ ds;
S
h(x1)
n
S
m
x1
R
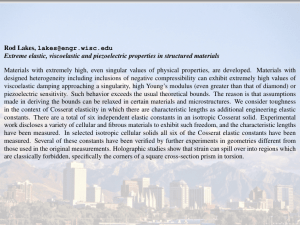
Fig. 1. Schematic depiction of the profile of the step given by
Eq. (1). The surface of the crystal is denoted by S, while the
bulk is denoted by R. The unit vectors n and m are locally
normal and tangent to the surface, respectively.
where the first integral over the volume R occupied
by the stepped crystal, is the elastic energy of the
bulk atoms and the second term, over the surface
of the crystal S, is the work done by the surface
stress in stretching or compressing the atomicbonds on the surface. In (2), Cijkl is the array of
elastic constants, ui;j ¼ oui =oxj , where ui is the icomponent of the displacement field, p
s is
the arc-ffi
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
length along the surface, so that ds ¼ dx21 þ dx22 ,
ðsÞ is the surface stretch and sðsÞ is the surface
stress. The surface stretch is related to the material
displacement field ui through the relation
ðsÞ ¼ mi ðsÞui;j mj ðsÞ;
model for dislocations, to obtain the elastic-fields
of a surface step. The relaxed configuration of the
flat surface prior to the creation of the step is
chosen to be the reference state relative to which the
elastic displacement fields are calculated. Using
the coordinate axes shown in Fig. 1, the profile of
the step is assumed to be of the form
hs
hðx1 Þ ¼ tan1
p
x1
;
r0
ð1Þ
where hs is the step-height and r0 is a parameter
that ensures that the field variables (e.g. stresses,
displacements) do not diverge at x1 ¼ 0. As we will
see, with this choice of the profile, at distances
from the step that are much larger than r0 , the
elastic-fields coincide with the standard dipole
model of Marchenko and Parshin. The parameter
r0 can, in principle, be obtained from atomistic
simulations by comparing either the displacement
field or the elastic energies, as is done in the case of
dislocations [10,11]; intuitively, we expect r0 to be
of the order of hs or smaller.
When a step is created on a surface by removing
the topmost layer of atoms to the left of the step,
the remaining atoms will undergo further elastic
relaxation, so as to minimize the total energy of
the system. The total energy involved in this
relaxation process can be written as
ð3Þ
where mi ðsÞ is a unit vector tangent to the surface
S at the point s. In the presence of the step, we
assume that the surface stress has the form
sðsÞ ¼ s0 þ Dh0 ðsÞ;
ð4Þ
where s0 is the surface stress of the flat surface,
prime denotes differentiation with respect to s and
D is a parameter that gives a measure of the
deviation of the surface stress in the vicinity of
the step relative to s0 . Below, we will show that the
constant D which appears along with the derivative of the height with respect to the arclength is
related to one of the components of the dipole in
the MP model of surface steps.
Since the first term in (2) is always positive, the
total energy of the stepped surface can only be
lowered if the second term is sufficiently negative;
we will show that this is indeed the case. To this
end, using the relations
ui;j mj ¼
oui ox1 oui ox2 dui
þ
¼
ox1 os ox2 os
ds
dmi ðsÞ
¼ kðsÞni ðsÞ;
ds
and
ð5Þ
where ni is the unit outward normal to S and kðsÞ is
the curvature of the surface, which is taken to be
positive if the center of curvature is outside the
material, we can rewrite the second term of (2) as
V.B. Shenoy, C.V. Ciobanu / Surface Science 554 (2004) 222–232
Z
sðsÞðsÞ ds
S
Z dsðsÞ
mi ðsÞ þ sðsÞkðsÞni ðsÞ ui ðsÞ ds:
¼
ds
S
ð6Þ
To obtain the above equation, we have set
boundary terms which come from an integral of
the type
Z
d
ðsðsÞui ðsÞmi ðsÞÞ ds
ð7Þ
ds
S
to zero, since the displacement field of the step
vanishes at the infinitely remote boundaries of the
system. Mechanical equilibrium requires that the
variation in the total energy bel due to small perturbations in the displacement field dui from
equilibrium values of ui must vanish to linear order
in dui . Using (2) and (6), the first-order variation in
energy is
Z
dbel ¼
dui;j ðxÞCijkl uk;l ðxÞ dx
R
Z dsðsÞ
mi ðsÞ þ sðsÞkðsÞni ðsÞ dui ðsÞ ds:
ds
S
ð8Þ
The first term in the above equation can be further
simplified to yield
Z
dui;j ðxÞCijkl uk;l ðxÞ dx
R
Z
Z
¼
rij ðsÞnj ðsÞdui ðsÞ ds rij;j ðxÞdui ðsÞ dx;
S
R
ð9Þ
where rij ¼ Cijkl uk;l is the stress tensor. Because
the variation in (8) must vanish for arbitrary dui ,
we obtain the usual equilibrium condition that the
divergence of the stress must vanish at each
material point, rij;j ¼ 0 in the region R. In addition, traction boundary conditions reflecting the
structure of the stepped surface emerge in the
form
dsðsÞ
;
ds
ni ðsÞrij ðsÞnj ðsÞ ¼ sðsÞkðsÞ;
mi ðsÞrij ðsÞnj ðsÞ ¼
ð10Þ
225
where the first term represents the shear traction
on the surface due to the variation of surface stress
with position along the surface, while the second
term represents the normal traction on S due to the
so-called Laplace pressure which arises from surface stress. The relation of these surface tractions
to the dipoles introduced by Marchenko and
Parshin can be understood by assuming that
jh0 ðsÞj 1, which also allows the use of surface
elastic Green’s function to obtain the displacement
fields. This analysis is carried out in the next paragraph.
When the condition jh0 ðsÞj 1 is satisfied, the
surface tangent and normal vectors can be written,
respectively, as ðm1 ; m2 Þ ¼ ð1; h0 ðx1 ÞÞ and ðn1 ; n2 Þ ¼
ðh0 ðx1 Þ; 1Þ to linear order in surface slope. In this
limit, the 1- and 2-components of the surface
tractions in (10) can be written as
f1 ðx1 Þ r12 ðx1 Þ ¼ D
d2 hðx1 Þ
;
dx21
d2 hðx1 Þ
f2 ðx1 Þ r22 ðx1 Þ ¼ s0
;
dx21
ð11Þ
where the second derivative of the step profile can
be calculated from (1). When the parameter r0 is
small, using the relation
lim
r0 !0
d2 hðx1 Þ
2x1 r0
¼ hs lim
¼ hs d0 ðx1 Þ;
r0 !0 pðx2 þ r2 Þ2
dx21
1
0
ð12Þ
we have
fðx1 Þ ¼ dd0 ðx1 Þ where d ¼ Dhs e1 þ s0 hs e2
ð13Þ
is the surface dipole introduced by Marchenko and
Parshin and ei s are unit vectors in the coordinate
directions. The above analysis shows that our
continuum description reduces to the well-known
MP description for small r0 , but does not yield
diverging elastic fields near the step-edge. Indeed,
within an atomic-scale description of a step, the
displacement field of a step would be large but
bounded at the step-edge; the parameter r0 can
therefore be obtained by comparing the elastic
fields of the present model (which we will derive
below) with that of an atomistic simulation. In this
respect, the present approach is similar to the PN
model, where a closely related length parameter
that regularizes the elastic field is derived from
226
V.B. Shenoy, C.V. Ciobanu / Surface Science 554 (2004) 222–232
atomic-scale calculations. Recent work, where abinitio density functional calculations are used to
obtain the parameters in the PN model, can be
found in Refs. [10,11].
The displacement field can be obtained from the
surface tractions in (11) using the relation
Z 1
ui ðx1 Þ ¼
Gij ðx1 xÞfj ðxÞ dx;
ð14Þ
e2 ,e02
1
where Gij is the surface Green’s function for an
elastic half-space. This relation can be combined
with (6) to express the elastic energy in (2) in terms
of the surface tractions:
Z
Z
1 1 1
bel ¼ fi ðxÞGij ðx x0 Þfj ðx0 Þ dx dx0 :
2 1 1
ð15Þ
We note that the elastic relaxation of surface
atoms leads to a net gain in the surface contribution to the total energy (second term in (2)), which
is twice the energy lost in the elastic deformation
of the bulk (first term in (2)), so that there is an
overall gain (or reduction) in the total energy of
the system. Note that the elastic energy can depend
on the orientation of the steps through the orientation dependence of the components of the dipole
in (13) and the elastic constants (Cijkl ). Consequently, the contribution of the elastic energy to
the stiffness of the steps will also be a function of
the orientation of the steps. In what follows, we
will use the surface Green’s function to obtain
quantitative estimates for elastic self-energy and
stiffness of surface steps in cubic materials. It is
also important to note that there are other key
contributions to the energy and stiffness of surface
steps––these include the energy required to break
the bonds (prior to elastic relaxation) and the longrange interactions due to electrical dipoles that
might be formed at the step-edge. We do not
consider these terms here; the aim of the present
work is to estimate the contribution of the elastic
fields to the stiffness of steps.
3. Orientation dependence of step-stiffness
To obtain the surface Green’s function for an
arbitrary orientation of the step, we first consider
φ
e3
φ
e10
e03
e1
Fig. 2. Transformation of coordinate axes for computing the
elastic constants for arbitrary orientations of the surface step.
The step runs along the e3 -direction on a surface whose outward normal is directed in the e2 -direction (refer to Fig. 1). The
ei -basis is obtained from the e0i -basis by a counter-clockwise
rotation about the e2 -axis through an angle /. The unit vectors
and the elastic constants in the e0i -basis for (0 0 1), (1 1 0) and
(1 1 1) orientations of cubic crystals are given in Table 1 and
Appendix A, respectively.
the orientation dependence of the elastic constants.
Let e2 and e3 in Fig. 2 denote, respectively, the unit
vector that is normal to the surface on which the
step is created and the unit vector that is parallel to
the direction along which the step runs on this
surface. The elastic constants for the crystal oriented in this fashion can be obtained from the
elastic constants of the crystal aligned along high
symmetry directions (denoted by e0i in Fig. 2) by
using the standard transformation rules for fourthorder tensors. The basis vectors e0i that we will use
for the (0 0 1), (1 1 0) and (1 1 1) surfaces of cubic
materials and the corresponding array of elastic
constants are given in Appendix A. With this
choice, the ei -basis can be transformed to the e0i basis by a simple rotation about the e02 -direction
(refer to Fig. 2); the transformation tensor can be
then written as
0
1
cos / 0 sin /
Rð/Þ ¼ @ 0
1
0 A;
ð16Þ
sin / 0 cos /
where / is the angle made by the step-direction
0
(e3 ) with the e03 -direction. If Cpqrs
are the elastic
V.B. Shenoy, C.V. Ciobanu / Surface Science 554 (2004) 222–232
constants in the e0i -basis, the elastic constants in
transformed basis can be written in terms of the
components of the transformation tensor as
0
:
Cijkl ð/Þ ¼ Rip ð/ÞRjq ð/ÞRkr ð/ÞRls ð/ÞCpqrs
ð17Þ
Following the work of Ting [9], the elastic
constants in (17) can be used to express the surface
elastic Green’s function in the form
8 p1 ðlog jx x0 jÞI 12 Sð/Þ L1 ð/Þ;
>
>
<
0
x1 x > 0; 0
Gðx x0 Þ ¼
>
p ðlog jx x jÞI þ 12 Sð/Þ L1 ð/Þ;
>
:
x x0 < 0;
ð18Þ
where I is the identity tensor and the expressions
for the Barnett–Lothe tensors [12], Sð/Þ and Lð/),
are given in Appendix B. The displacement field
of the surface step can be obtained by using (18)
in (14); the resulting integral can be evaluated
in closed form to give
uðx1 Þ ¼ 1 x1
L1 ð/Þdð/Þ
pr02 1 þ x21
r2
0
1
1
þ
Sð/ÞL1 ð/Þdð/Þ:
pr0 1 þ x21
r2
ð19Þ
0
In the above equation dð/Þ ¼ ½hs Dð/Þ; hs s0 ð/Þ; 0
denotes the orientation dependent dipole vector of
the step. It can be seen that the displacements
decay as 1=x1 when x1 r0 , which is expected for a
dipolar field, while remaining well-behaved near
the edge of the step. The above relation for the
displacement field can be used in (15) to obtain the
elastic self energy of the step,
bel ð/Þ ¼ 1
di ð/ÞL1
ij ð/Þdj ð/Þ;
8pr02
ð20Þ
from which the contribution of the elastic fields
to the stiffness of steps can be written as [14]
2
~ ð/Þ ¼ b ð/Þ þ d bel ð/Þ :
b
el
el
d/2
ð21Þ
An order-of-magnitude estimate of the elastic
self-energy of the step can be derived by taking
r0 0:3hs , so that bel ð/Þ s20 =E, where E is comparable in magnitude to the Young’s modulus of
227
the material. Taking s0 1 J/m2 and E 100
GPa, which is typical for metals and semicon Since
ductors, we find that bel ð/Þ 10 meV/A.
the experimentally determined step formation
(for SB and
energies can vary from 10 meV/A
DB steps on Si(0 0 1) [13]) to relatively large
(for h1 1 0i steps on
values like 100 meV/A
Cu(0 0 1) [14]), the elastic contribution to the step
energy can be anywhere from 10% to nearly
100% of the formation energy of steps. In the
next section, we will focus attention on the stiffness of steps and show that the contribution of
the elastic fields to the stiffness of steps can be
as large as 50 meV/A.
4. Numerical estimates for Cu
In this section we provide numerical results for
the orientation dependence of the step formation
energies stiffnesses for the (0 0 1), (1 1 0) and (1 1 1)
surfaces of Cu. The elastic constants of Cu, referred to the standard h0 0 1i-oriented cubic basis
are taken to be C11 ¼ 168:4 GPa, C12 ¼ 121:4
GPa and C44 ¼ 75:4 GPa [7]. As noted earlier, the
elastic constants for a given orientation of the
step can be obtained using (17), where the C 0 s are
tabulated in Appendix A. In order to calculate the
elastic self-energy, we require information on the
intrinsic dipole, Dhs , whose strength is expected to
depend on the details of the atomic bonding
configurations at the step-edge and has to be
obtained from an atomic-scale calculation. However, atomistic simulations of Shilkrot and Srolovitz [15] for h0 0 1i steps on Ag(0 0 1) and
Ni(0 0 1) surfaces show that the magnitude of the
intrinsic dipole is very close to the magnitude of
the 2-component of the dipole, s0 hs (refer to (13)).
In what follows, in order to obtain numerical
estimates for the orientation dependence of the
stiffness, we will assume that D ¼ s0 . Further, we
take the regularization parameter r0 to be 0.33hs
in all the cases; this value is comparable to the
core parameter that is required to make the dislocation energies computed in atomistic calculations equal that of linear anisotropy elasticity
theory in a variety of material systems (refer to
Table 8-2, p. 232 of Ref. [7]).
228
V.B. Shenoy, C.V. Ciobanu / Surface Science 554 (2004) 222–232
4.1. Steps on Cu(0 0 1)
(in meV/A0)
-12
We first focus attention on the orientation
dependence of the stiffness of steps on Cu(0 0 1). In
general, the elastic self-energy in (20) includes
contributions from the two components of the dipole in (13) and the contributions from the interactions between these components. The interaction
terms however vanish on the (0 0 1) surface due to
the crystallographic symmetries of this surface, so
that
bel ð/Þ ¼ h2s 2 1
D L11 ð/Þ þ s20 L1
22 ð/Þ
2
8pr0
bD þ bs ;
(a)
-13
βD(φ)
βτ(φ)
-14
-15
0
ð22Þ
where we have used the fact that the surface stress
tensor of the (0 0 1) surface is isotropic [17]. Since
we were not able to find experimental data for the
surface stress of Cu surfaces, we have used the
results of Wan and coworkers [16], calculated by
using a modified-embedded-atom potential. The
orientation dependence of the self-energy of each
component of the dipole, obtained by taking
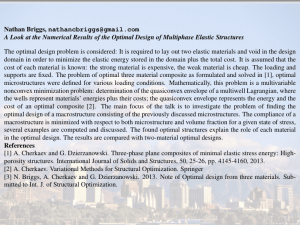
D ¼ s0 ¼ 2:1 J/m2 , is shown in Fig. 3(a). We find
that the self-energy of the step that runs along
h1 0 0i, which is the soft-elastic direction is lower
than the self-energy of the h1 1 0i-step by about 3
The corresponding difference in the stiffmeV/A.
ness of steps, shown in Fig. 3(b), however is about
one order of magnitude larger. This can be
understood by noting that the h1 1 0i-direction is a
local maximum of the self-energy (and hence has
negative curvature at / ¼ 0), while the h1 0 0idirection is a local maximum with a positive
curvature. Since the stiffness is the sum of the selfenergy and its curvature, the energy cost associated
with changing the orientation of the step from the
soft-elastic direction becomes large.
In the above analysis, since the dipoles were
taken to be independent of the orientation, the
angle dependence of the stiffness stems entirely
from the anisotropy of the elastic constants. Recent
experimental work in this case has shown that while
the stiffnesses of steps close to the h1 1 0i-direction
agree with the predictions of the Ising and SOS
models, these models underestimate the stiffness of
the steps close to the h1 0 0i-direction by about
10
20
30
40
φ (in degrees)
(in meV/A0)
(b)
50
∼
∼
βD(φ)-βD(0)
40
∼
∼
βτ(φ)−βτ(0)
30
20
10
0
0
10
20
30
φ (in degrees)
40
Fig. 3. The elastic self-energy (a) and the contribution of elastic
fields to the stiffness of steps (b) plotted as a function of the
orientation of the step relative to the h1 1 0i-direction on
Cu(0 0 1). The subscripts s and D refer to contributions from the
1- and 2-components of the dipole in (13), respectively.
1 As noted earlier, the contribution
36 meV/A.
from the elastic fields have to be added to the stiffness obtained from models based on short-range
1
~ k Þ, in the
Fig. 2 of Ref. [1] shows the magnitude of kB T =ðba
case of h1 0 0i-steps, to be 0.2 for the experimental data and
0.7 for the Ising/SOS model. When kB T ¼ 26 meV and the
we find b
~ to be 51 and 15 meV/
atomic spacing ak ¼ 2:55 A,
for the data from measurements and Ising model, respecA
tively.
V.B. Shenoy, C.V. Ciobanu / Surface Science 554 (2004) 222–232
interactions, to account for the long-range relaxation effects due to atomic displacements. If the
long-range interactions are to be invoked to account for the discrepancy between the predictions
of the Ising/SOS models and experimental data, the
work of Dieluweit et al. would suggest that the
difference in the contribution to the stiffness from
these interactions between the h1 1 0i and the h1 0 0i
This value is indeed
directions is about 36 meV/A.
comparable in magnitude to the difference in stiff predicted by the elastic fields in
ness (50 meV/A)
Fig. 3. Given the simplicity of the analysis, this
agreement is indeed encouraging.
0
(in meV/A )
-4
4.3. Steps on Cu(1 1 1)
On the (1 1 1) surface of cubic materials, the
interactions between the two components of the
dipole in (13) do not vanish on the basis of symmetry requirements. Consequently, the decomposition of the self-energy given in (22) ceases to hold
on this surface. Also, the surface stress tensor of
this surface is isotropic due to the presence of a
βτ(φ)
(a)
βD(φ)
-6
-8
-10
-12
0
4.2. Steps on Cu(1 1 0)
As in the case of the (0 0 1) surface, the interactions between the distinct components of the
dipole in (13) vanish for the steps on this surface,
so that the decomposition of the self-energy given
in (22) remains valid. The surface stress, however,
is anisotropic due to absence of a fourfold symmetry axis on this surface [17]. The orientation
dependence of the self-energies, calculated by
taking s0 ð/Þ ¼ 1:22 cos2 / þ 1:95 sin2 / J/m2 [16],
is given in Fig. 4. The self-energies decrease in a
monotonous manner from the hard-elastic h1 1 0idirection to the soft h1 0 0i-direction (/ ¼ 90°).
The difference in the self-energies between these
which is comparable
directions is about 8 meV/A,
to the behavior on the (0 0 1) surface. Unlike the
(1 0 0) surface, the stiffness of the steps on this
surface shows a non-monotonic trend, with the
stiffness of the h1 0 0i-steps exceeding the stiffness
The anof the h1 1 0i-steps by about 40 meV/A.
isotropies in both the surface stress tensor and the
elastic constants lead to the complex behavior of
the stiffness observed in the present case.
229
20
40
60
80
φ (in degrees)
(in meV/A0)
(b)
40
30
20
∼
∼
βD(φ)-βD(0)
10
∼
∼
βτ(φ)−βτ(0)
0
0
20
40
60
φ (in degrees)
80
Fig. 4. The elastic self-energy (a) and the contribution of elastic
fields to the stiffness of steps (b) plotted as a function of
the orientation of the step relative to the h1 1 0i-direction on
Cu(1 1 0). The subscripts s and D refer to contributions from the
1- and 2-components of the dipole in (13), respectively.
threefold rotation axis [17]. The total elastic selfenergies and stiffnesses obtained by taking s0 ¼
1:92 J/m2 [16] and D ¼ s0 , D ¼ 0:5s0 and D ¼ 0 are
given in Fig. 5. For any non-zero value of D, the
self-energy shows a non-monotonic behavior with
a minimum at an angle between the h1 1 2i-direction and the h1 1 0i-direction, while the behavior is
monotonic when D ¼ 0. The more complicated
behavior of the self-energy can be traced to the
interaction between the two components of the
230
V.B. Shenoy, C.V. Ciobanu / Surface Science 554 (2004) 222–232
β(φ)
(in meV/A0)
Once again, the non-monotonic behavior in the
orientation dependence of the step-stiffness for
D 6¼ 0 can be traced to the interactions between the
two distinct components of the step-edge dipole.
(a)
D=0
-12
D = 0.5τ0
-14
5. Concluding observations
-16
-18
-20
D = τ0
-22
-24
0
10
20
30
φ (in degrees)
∼
∼
β(φ)−β(0)
0
(in meV/A )
(b)
D = τ0
D = 0.5τ0
28
24
D=0
20
16
12
8
4
0
0
10
20
φ (in degrees)
Fig. 5. The elastic self-energy (a) and the contribution of elastic
fields to the stiffness of steps (b) plotted as a function of the
orientation of the step relative to the h1 1 0i-direction on
Cu(1 1 1). The symbols s and D refer the 1- and 2-components
of the dipole in (13), respectively.
dipole at the step-edge; the location of the minimum in the self-energy is determined by the ratio
of D and s0 (refer to (13)). A key point to be noted
here is that the variation of the self-energy is an
than the
order of magnitude smaller (0.5 meV/A)
variations for the (1 0 0) and (1 1 0) surfaces. The
step-stiffness, on the other hand, has a variation of
for all the cases considered.
about 30 meV/A
In summary, we have analyzed the orientation
dependence of the stiffness of surface steps with a
continuum model based on anisotropic elasticity.
Our key finding is that the anisotropy in elastic
properties and surface stresses can result in a 5
difference in the step self-energies between
meV/A
the soft and hard orientations, while the difference
in the step-stiffnesses can be one order of magnitude
higher. This estimate for the variation in stiffness is
comparable to the difference in stiffness between the
experimental data and Ising/SOS models (35
for the h1 1 0i steps on Cu(0 0 1). In our
meV/A)
calculations for the Cu(0 0 1) surface, the orientation dependence of stiffness can be solely attributed
to the anisotropy in elastic constants. This result
suggests that if one considers materials with smaller
elastic anisotropy (e.g., tungsten or aluminum),
then the orientation dependence of the stiffness of
the steps on the (0 0 1) surface of these materials
should be negligible; it would be interesting to see
how well the experimental data in these systems
compares with the predictions of models based on
short-range interactions.
The present model requires the knowledge of
parameters such as the regularization-length r0
and the dipole D, which are expected to depend on
atomic-scale phenomena (such as bonding) at the
step-edge. In our analysis, we have only used an
order-of-magnitude estimate for these parameters;
a more realistic description can be obtained with
the aid of atomistic simulations. In general, data
on step-energies from experiments or quantum
mechanical simulations (see for example Ref. [18])
would contain information on both the electrical
and elastic interactions; it is usually difficult to
separately obtain the contribution of the individual interactions. The present model could also be
useful in this regard––if the atomic displacements
are known from experiments/atomistic calculations, the magnitudes of the dipoles and hence the
V.B. Shenoy, C.V. Ciobanu / Surface Science 554 (2004) 222–232
elastic interactions can be extracted by comparison
with our model.
0
0
¼ C13
¼ C12 ;
C12
231
0
C23
¼ 12ðC11 þ C12 Þ C44 ;
0
C44
¼ 12ðC11 C12 Þ;
0
0
C55
¼ C66
¼ C44 ;
Acknowledgements
III. (1 1 1) Surface
Support from the MRSEC at Brown University
(DMR-0079964), National Science Foundation
grants CMS-0093714 and CMS-021 0 095, and the
Salomon Research Award from the Graduate
School at Brown University is gratefully acknowledged.
Appendix A. Elastic constants for different surface
orientations
0
0
C11
¼ C33
¼ 12ðC11 þ C12 Þ þ C44 ;
0
C22
¼ 13ðC11 þ 2C12 þ 4C44 Þ;
0
0
¼ C23
¼ 13ðC11 þ 2C12 4C44 Þ;
C12
0
C13
¼ 16ðC11 þ 5C12 2C44 Þ;
0
0
0
ffiðC11 þ C12 þ 2C44 Þ;
¼ C16
¼ C54
¼ p1ffiffiffi
C36
18
0
0
¼ C66
¼ 13ðC11 C12 þ C44 Þ;
C44
Below, we provide the expressions for the ar0
rays of elastic constant Cpqrs
(refer to Eq. (17)) for
the (0 0 1), (1 1 0) and (1 1 1) surfaces. The coordinate axes (e0i s in Fig. 2) for each of these orientations are given in Table 1. We have used the matrix
notation of Voigt, where the pair of indices 11, 22,
33, 23, 13, 12 are denoted by the labels 1, 2, 3, 4, 5
and 6, respectively. C11 , C12 and C44 refer to standard cubic elastic constants where the cube axes
are oriented along h1 0 0i. Note that only non-zero
components of C 0 s are given below.
0
C55
¼ 16ðC11 C12 þ 4C44 Þ:
I. (0 0 1) Surface
Rik ðh; /Þ ¼ Cijks ð/Þnj ms ;
0
0
¼ C33
¼ 12ðC11 þ C12 Þ þ C44 ;
C11
0
C22
¼ C11 ;
0
0
C12
¼ C23
¼ C12 ;
0
C13
¼ 12ðC11 þ C12 Þ C44 ;
0
0
C44
¼ C66
¼ C44 ;
0
C55
¼ 12ðC11 C12 Þ;
¼ C11 ;
0
C22
¼
0
C33
¼
1
ðC11
2
þ C12 Þ þ C44 ;
Table 1
The table shows the unit vectors e01 , e02 and e03 (refer to Fig. 2)
that define the coordinate systems for computing the elastic
constants in the case of the (0 0 1), (1 1 0) and (1 1 1) surface
orientations
Surface
e01
e02
e03
(0 0 1)
p1ffiffi[
1 1 0]
2
(1 1 0)
[0 0 1]
p1ffiffi[1 1 2]
[0 0 1]
p1ffiffi[1 1 0]
p1ffiffi[1 1 0]
2
1 0]
p1ffiffi[1
2
1 0]
p1ffiffi[1
2
(1 1 1)
6
2
p1ffiffi[1 1 1]
3
The Barnett–Lothe tensors Sð/Þ and Lð/Þ [12]
in the surface Green’s function (refer to (18)) are
derived from matrices Q, R and T whose components are given by
Qik ðh; /Þ ¼ Cijks ð/Þnj ns ;
ðB:1Þ
Tik ðh; /Þ ¼ Cijks ð/Þmj ms ;
in which h is a real parameter and
ni ¼ ½cos h; sin h; 0;
ðB:2Þ
mi ¼ ½ sin h; cos h; 0:
II. (1 1 0) Surface
0
C11
Appendix B. Surface Green’s function
Using these matrices, the Barnett–Lothe tensors
can be written as [9]
Z
1 p
Sð/Þ ¼
N1 ðx; /Þ dx and
p 0
ðB:3Þ
Z
1 p
N3 ðx; /Þ dx;
Lð/Þ ¼
p 0
where
N1 ðh; /Þ ¼ T1 ðh; /ÞRT ðh; /Þ
and
N3 ðh; /Þ ¼ Rðh; /ÞT1 ðh; /ÞRðh; /Þ Qðh; /Þ:
ðB:4Þ
232
V.B. Shenoy, C.V. Ciobanu / Surface Science 554 (2004) 222–232
References
[1] S. Dieluweit, H. Ibach, M. Geisen, T.L. Einstein, Phys.
Rev. B 67 (2003) 121410(R).
[2] G.S. Bales, A. Zangwill, Phys. Rev. B 41 (1990) 5500.
[3] O. Pierre-Louis, M.R. D’Orsogna, T.L. Einstein, Phys.
Rev. Lett. 82 (1999) 3661.
[4] J. Tersoff, E. Pehlke, Phys. Rev. Lett. 68 (1992) 816.
[5] V.I. Marchenko, Y.A. Parshin, Sov. Phys. JETP 52 (1980)
129.
[6] C. Jayaprakash, C. Rottman, W.F. Saam, Phys. Rev. B 30
(1984) 6549.
[7] J.P. Hirth, J. Lothe, Theory of Dislocations, second ed.,
John Wiley, 1982.
[8] R. Peierls, Proc. Roy. Soc. 52 (1940) 23;
F.R.N. Nabarro, Proc. Phys. Soc. Lond. 59 (1947) 256.
[9] T.C.T. Ting, Q.J. Mech. Appl. Math. 45 (1991) 119.
[10] G. Lu, N. Kioussis, V.V. Bulatov, E. Kaxiras, Mater. Sci.
Eng. A 309 (2001) 142.
[11] O.N. Mryasov, Y.N. Gornostyrev, A. van Schilfgaarde,
A.J. Freeman, Acta. Mater. 50 (2002) 4545.
[12] D.M. Barnett, J. Lothe, Phys. Norv. 7 (1973) 13.
[13] H.J.W. Zandvliet, Rev. Mod. Phys. 72 (2000) 593.
[14] M. Giesen, Prog. Surf. Sci. 68 (2001) 1.
[15] L.E. Shilkrot, D. Srolovitz, Phys. Rev. B 53 (1996)
11120.
[16] J. Wan, Y.L. Fang, D.W. Gong, S.G. Shen, X.Q. Fan,
Model. Sim. Mater. Sci. Eng. 7 (1999) 189.
[17] R.C. Cammarata, Prog. Surf. Sci. 46 (1994) 1.
[18] V.B. Shenoy, C.V. Ciobanu, Phys. Rev.B. 67 (2003)
081402(R).