Colorado School of Mines CHEN403 Linear Open Loop Systems
advertisement

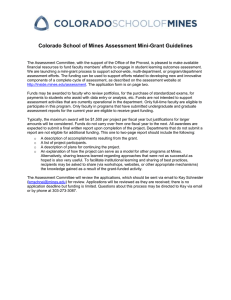
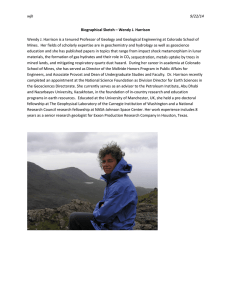
Colorado School of Mines CHEN403 Linear Open Loop Systems Linear Open Loop Systems................................................................................................................................ 1 2nd Order Systems ............................................................................................................................................... 1 Dynamic Response of 2nd Order System ...................................................................................................... 1 Step Change Response ................................................................................................................................... 3 Descriptors for an Underdamped System .............................................................................................. 6 Natural 2nd Order Systems................................................................................................................................ 7 2nd Order Systems Output modeled with a 2nd order ODE: d2 y dy a2 2 + a1 + a0 y = bf ( t ) dt dt If a0 ≠ 0 , then: 2 a2 d 2 y a1 dy b dy 2 d y + + y = f (t ) ⇒ τ + 2ζτ + y = K p f ( t ) 2 2 a0 dt a0 dt a0 dt dt where: τ is the natural period of oscillation. ζ is the damping factor. K p is the steady state gain. For deviation variables, where y ( 0) = f ( 0 ) = 0 , the Laplace transform will be: (τ s 2 2 ) + 2ζτs + 1 y ( s ) = K p f ( s ) ⇒ G ( s ) = y(s) f (s) = Kp τ s + 2ζτs + 1 2 2 2nd order systems arise from several situations: • Multicapacity processes — two or more 1st order systems in series. • Inherently 2nd order system — not typical in chemical-type processes. • Process with controller. Dynamic Response of 2nd Order System We can express the transfer function in terms of its roots, or poles: 2nd Order Systems -1- December 21, 2008 Colorado School of Mines CHEN403 K p / τ2 K p / τ2 . G(s) = 2 2 = = τ s + 2ζτs + 1 s 2 + 2ζ s + 1 ( s − p1 )( s − p2 ) τ τ2 Kp What are the poles associated with the 2nd order equation? Can determine the roots using the quadratic equation: 2ζ 4ζ 2 4 ± − 2 2 ζ2 − 1 ζ τ τ τ =− ± p1 , p2 = τ τ 2τ2 − The nature of the solution depends upon the damping factor, ζ : • Over Damped Response. If ζ > 1 , then the poles are real & distinct, leading to the terms in the transfer function: G(s) = K p C1 K C2 + 2p 2 τ s − p1 τ s − p2 with the following terms in the solution: y ( t ) = C1 • Kp τ 2 e tp1 + C2 Kp etp2 τ2 Critically Damped Response. If ζ = 1 , then there is a multiple real pole, p = −1/ τ , leading to the terms: 1 C1 s + + C 2 τ G(s) = 2 2 τ 1 s + τ Kp with the following terms in the solution: y ( t ) = C1 • Kp τ 2 e − t / τ + C2 Kp τ 2 te −t / τ Under Damped Response. If ζ < 1 , then the poles are complex conjugates, leading to the terms in the transfer function: 2nd Order Systems -2- December 21, 2008 Colorado School of Mines CHEN403 ζ C1 s + + C 2 τ G(s) = 2 2 τ ζ 1 − ζ2 + + 2 s τ τ Kp with the following terms in the solution: y ( t ) = C1 Kp τ2 e −t ζ / τ t 1 − ζ2 cos τ t 1 − ζ2 Kp −t ζ / τ + C2 sin e 2 τ τ − ζ 1 Step Change Response Let’s look at response to a unit step change. f ( t ) = α ⋅ H ( t ) ⇒ f ( s ) = α / s . So, for a 2nd order system: y(s) = 1 α τ2 s + 2ζτ = α − K p 2 2 τ2 s 2 + 2ζτs + 1 s s τ s + 2ζτs + 1 Kp 2ζ s+ 1 τ y ( s ) = αK p − 2ζ 1 s s2 + s + 2 τ τ ζ ζ s+ + 1 τ τ ∴ y ( s ) = αK p − 2 s ζ 1 − ζ2 + + 2 s τ τ The form for inverting the 2nd term depends upon the value of the damping factor, ζ . For an over damped 2nd order system, ζ > 1 , and: ζ ζ s+ + 1 τ τ y ( s ) = αK p − 2 s ζ ζ2 − 1 + − 2 s τ τ 2nd Order Systems -3- December 21, 2008 Colorado School of Mines CHEN403 t ζ2 − 1 t ζ2 − 1 ζ − y ( t ) = αK p 1 − e −t ζ / τ cosh e −t ζ / τ sinh 2 τ τ 1 ζ − t ζ2 − 1 t ζ 2 − 1 ζ −t ζ / τ + = αK p 1 − e sinh cosh 2 τ τ ζ −1 This type of response is termed over damped since it resembles a sluggish exponential decay. It becomes more and more sluggish as ζ is increased. Next, for a critically damped 2nd order system, ζ = 1 : 1 1 s+ + 1 1 τ τ 1 − 1 − 1 y ( s ) = αK p − K = α p 2 s s 1 τ 1 2 1 s+ τ s+ τ s+ τ t y ( t ) = αK p 1 − 1 + e −t / τ τ This is called critically damped because this is the smallest value of ζ to retain purely exponential decay behavior. Now, for an under damped 2nd order system, ζ < 1 : ζ ζ s+ + 1 τ τ y ( s ) = αK p − 2 s ζ 1 − ζ2 s + τ + τ2 t 1 − ζ2 y ( t ) = αK p 1 − e −t ζ / τ cos τ t 1 − ζ2 ζ − e −t ζ / τ sin τ 1 − ζ2 t 1 − ζ 2 = αK p 1 − e −t ζ / τ cos τ t 1 − ζ2 ζ + sin τ 1 − ζ2 Notice that this response shows an exponential decay but there is also oscillatory behavior. We can better see what the oscillatory behavior looks like if we combine the sine & cosine terms into a single sine term with a phase angle offset. Remember: 2nd Order Systems -4- December 21, 2008 Colorado School of Mines CHEN403 p cos θ + q sin θ = r sin ( θ + φ ) r = p2 + q 2 where: tan φ = p q So: r = 1+ ζ2 1 = 2 1−ζ 1 − ζ2 tan φ = 1 − ζ2 ζ Defining: 1 − ζ2 ω≡ τ then: e −t ζ / τ y ( t ) = αK p 1 − sin ( ωt + φ ) 1 − ζ2 The following figure shows how the response to a unit step change of a 2nd order system depending upon the damping factor. Note that all curves have an initial slope of zero — this is different from a 1st order system. Note that as ζ gets smaller and smaller, the oscillations get larger and take longer to damp out. 2nd Order Systems -5- December 21, 2008 Colorado School of Mines CHEN403 2.0 1.8 1.6 ζ = 0.1 1.4 1.2 ζ = 0.5 y/α α Kp 1.0 ζ = 1.1 ζ = 0.9 0.8 0.6 ζ= 1 ζ=5 0.4 ζ = 10 0.2 0.0 0 2 4 6 8 10 12 t/ττ Descriptors for an Underdamped System There are several terms defined to describe the characteristics of an underdamped system’s response. These are also shown in the following figure: • Overshoot. A measure of how far the response exceeds the ultimate value. From the figure, this is A / α . From the response curve, the value is: −πζ Overshoot = exp 1 − ζ2 • Decay Ratio. The ratio of the overshoot of two successive peaks, C / A . It can be shown that this is: −2πζ 2 Decay Ratio = ( Overshoot ) = exp 1 − ζ2 • Period of oscillation. The time between peaks. Since the frequency of oscillation is: ω= 2nd Order Systems 1 − ζ2 τ -6- December 21, 2008 Colorado School of Mines CHEN403 then the period of oscillation is: T= 1 2π 2πτ = = f ω 1 − ζ2 • Rise time. The time it takes the response to 1st get to the ultimate value. • Response time. The time it takes the response to stay within 5% of the ultimate value. A C y/Kp Response Time Rise Time t Natural 2nd Order Systems There are four natural 2nd order systems described in Appendix 11A of Stephanopolous’s text (pp. 205 - 211): • Simple manometers • Externally mounted level indicators • Variable capacitance differential pressure transducers • Pneumatic valves We will go through the derivation of the transfer function for the externally mounted level indicators since it is not given in the text. 2nd Order Systems -7- December 21, 2008 Colorado School of Mines CHEN403 F0 hm h F1 We want to look at the flow of fluid within the external tube of length L having constant cross-sectional area Am . Using a similar derivation as that done to get Equation 11A.5, let us look at the forces along the plane at the bottom of the displacement chamber: Ftank − Ftube − Ffriction = where: Ftank Ftube mtube atube gc force at the entrance of the displacement tube due to the static head in the tank. force at the bottom of the displacement tube due to the static head in the displacement tube. Ffriction frictional losses in the displacement tube. mtube mass of fluid in the tube. atube acceleration of the fluid in the tube. As in the text, if we assume laminar flow in the displacement tube, then: Ffriction = Am 8µL 8µL dhm vave = Am 2 2 R gc R gc dt The acceleration of the fluid in the tube is: atube = dvave d 2hm = 2 dt dt so: 2nd Order Systems -8- December 21, 2008 Colorado School of Mines CHEN403 g g 8µL dhm ρAm L d 2hm ρ Amh − ρ Amhm − Am 2 = gc gc R gc dt gc dt 2 ρL d 2hm 8µL dhm ρg ρg + 2 + hm = h 2 gc dt R gc dt gc gc L d 2hm 8µL dhm + + hm = h g dt 2 R 2ρg dt Putting this ODE into the standard 2nd order form gives: τ2 = L ⇒ τ= g 2τζ = and: L g 8µL 4µL 1 8µL g 8µ ⇒ ζ= 2 ⋅ = 2 = 2 R ρg R ρg τ R ρg L ρR 2 L g Kp = 1 2nd Order Systems -9- December 21, 2008