Document 13356838
advertisement

3/6/00
Probabilistic
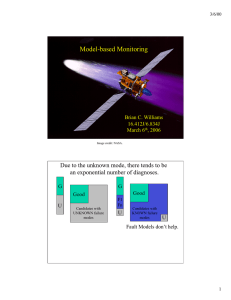
Model-based Diagnosis
10/28/07
Brian C. Williams
16.410/16.413
November 17th, 2010 1
copyright Brian Williams, 2005-09
Brian C. Williams, copyright 2000-09
Image credit: NASA.
Notation
St+1
st+1
ot+1
o1:t
α
10/28/07
set of hidden variables in the t+1 time slice
set of values for those hidden variables at t+1
set of observations at time t+1
set of observations from all times from 1 to t
normalization constant
copyright Brian Williams, 2005-09
2
1
3/6/00
Multiple Faults Occur
• three shorts, tank-line and
pressure jacket burst, panel
flies off.
Lecture 12: Framed as CSP.
• How do we compare the space of
alternative diagnoses?
• How do we prefer diagnoses that
explain failure?
Image source: NASA.
APOLLO
13
10/28/07
3
copyright Brian Williams, 2005-09
Due to the unknown mode, there tends to be
an exponential number of diagnoses.
G
G
Good
Good
F1
Fn
U
Candidates with
UNKNOWN failure modes
U
Candidates with
KNOWN failure U
modes
1.
Introduce fault models.
•
More constraining, hence more easy to rule out.
•
Increases size of candidate space.
2.
Enumerate most likely diagnoses Xi based on probability.
Prefix (k) ( Sort {Xi} by decreasing P(Xi | O) )
•
Most of the probability mass is covered by a few diagnoses.
4
10/26/10
2
3/6/00
Model-based Diagnosis
Xor(i):
G(i):
Out(i) = In1(i) xor In2(i)
Stuck_0(i):
Out(i) = 0
U(i):
1
1
1
0
1
A
A1
X
B
C
X1
A2
Input:
• Finite Domain Variables
X2
A3
0
G
1
Y
D
E
F
Z
~ GDE & Sherlock
[de Kleer & Williams, 87, 89]
Assumptions:
– <X,Y>
•
•
X
Y
– O
•
•
•
Φ(X, Y)
o
P(Xi)
mode variables
model variables
• Modes are static
observable variables O ⊆ Y.
• uniform dist on logical models.
model constraints
observations oi:n ∈ DO
a prior probability of modes
Output:
• {x ∈DX | ∃y∈DY s.t. x ∧ o ∧ Φ(x,y) is consistent}
⇒ P(X | oi:n)
• Xi ⊥ Xj for i ≠ j
(apriori)
• Oi ⊥ Oj | X
for i ≠ j
Consistency-based
Probabilistic,
Sequential Observations
copyright Brian Williams, 2005-09
10/28/07
5
Compute Conditional Probability via Bayes Rule
(Method 6)
P(X | o) =
P(o | X)P(X)
P(o)
=
P(o | X)P(X)
∑ P(o, x)
= αP(o | X)P(X)
x ∈X
=
P(o | X)P(X)
∑ P(o | x)P(x)
x ∈X
10/28/07
copyright Brian Williams, 2005-09
6
3
3/6/00
Candidate Prior Probabilities
P(X) = ∏ P(X i | X1:i−1 )
Chain rule
i
Assume Xi ⊥ Xj for i ≠ j:
P(X) =
∏ P(X )
i
X i ∈X
P(A = G,B = G,C = G) = .97
P(A = S1,B = G,C = G) = .008
P(A = S1,B = G,C = S0) = .00006
P(A = S1,B = S1,C = S0) = .0000005
7
10/26/10
in
out
0
A
X
B
Y
C
Leading diagnoses before output observed
10/26/10
8
4
3/6/00
Estimate probability by assuming a uniform
distribution (Method 7)
P(X | o) = αP(o | X)P(X)
How do we compute P(o | X), from logical formulae Φ(X,Y)?
Given theory Φ, sentence Q ….
… is inconsistent.
… could be true.
… must be true.
M(Q)
M(Φ)
P(Q | Φ)=
M(Q)
M(Φ)
M(Q)
0
M(Φ)
1
Problem: Logic doesn’t specify P(si) for models of consistent sentences.
copyright Brian Williams, 2005-09
10/28/07
9
Estimate probability by assuming a uniform
distribution (Method 7)
Problem: Logic doesn’t specify P(si) for models of consistent sentences.
⇒ Assume all models are equally likely → count models.
Model-based Diagnosis using model counting:
P(o | x) =
10/28/07
P(o, x) M(o ∧ x ∧Φ(x,Y ))
=
P(x)
M(x ∧Φ(x,Y ))
copyright Brian Williams, 2005-09
10
5
3/6/00
Simplify P(O | M) using the
Naïve Bayes Assumption (Method 7)
P(X | o) = αP(o | X)P(X)
Problem: P(o | X) can be hard to determine for large |o|.
Assume: observations o are independent given mode X.
o1 ⊥ o2 … ⊥ on | X
P(o | X) = P(o1 | X)P(o2 | X)…P(on | X)
by Naïve Bayes
copyright Brian Williams, 2005-09
10/28/07
11
Diagnosis with Sequential Observations
and the Naïve Bayes Assumption
P(X | o1:n ) =
P(on | X,o1:n−1 )P(X | o1:n−1 )
P(on | o1:n−1 )
=
= αP(on | X,o1:n−1 )P(X | o1:n−1 )
P(on | X,o1:n−1 )P(X | o1:n−1 )
∑ P(on , x | o1:n−1)
x ∈X
=
P(on | X,o1:n−1 )P(X | o1:n−1 )
∑ P(on | x , o1:n−1)P(x | o1:n−1)
x ∈X
Assume: observations o are independent given mode X.
o1 ⊥ o2 … ⊥ on | X
=
P(on | X)P(X | o1:n−1 )
∑ P(on | x)P(x | o1:n−1)
x ∈X
10/28/07
copyright Brian Williams, 2005-09
12
6
3/6/00
Estimating the Observation
Probability P(oi | M, o1:n-1) in GDE
GDE used naïve Bayes AND assumed consistent observations
for candidate m are equally likely.
P(on | x, o1:n-1) is estimated using model Φ(x,Y) according to:
If o1:n-1 ∧ x ∧ Φ(x,Y) entails on
Then P(on | x, o1:n-1) = 1
If o1 : ni-1 ∧ x ∧ Φ(x,Y) entails On ≠ on
Then P(on | m, o1:n-1) = 0
Otherwise, Assume all consistent assignments to On are equally likely:
let DCn ≡ {oc∈ DOn | o1:n-1 ∧ x ∧ Φ(x,Y) is consistent with On = oc }
Then P(on | x, o1:n-1) = 1 / |DCn|
10/28/07
copyright Brian Williams, 2005-09
13
in
0
A
X
B
Y
C
out
out
1
P(X | o 1:n ) = αP(o n | X)P(X | o 1:n−1 )
Observe out = 1:
x = <A=G, B=G, C=G>
Prior: P(x)
= .97
P(out = 0 | x)
=1
P(x | out = 0 )
= α x 1 x .97 = .97
10/28/07
copyright Brian Williams, 2005-09
14
7
3/6/00
in
0
A
X
B
Y
C
out
out
0
P(X | o 1:n ) = αP(o n | X)P(X | o 1:n−1 )
Observe out = 0:
x = <A=G, B=G, C=G>
Prior: P(x)
= .97
P(out = 0 | x)
=0
P(x | out = 0 )
= 0 x .97 x α = 0
10/28/07
copyright Brian Williams, 2005-09
15
in
out
0
A
X
B
Y
C
0
Priors for Single Fault Diagnoses:
10/26/10
16
8
3/6/00
in
out
0
A
X
B
Y
C
Leading diagnoses before output observed
17
10/26/10
in
out
0
A
X
B
Y
C
0
Top 6 of 64 = 98.6% of P
Leading diagnoses after output observed
10/26/10
18
9
3/6/00
Due to the unknown mode, there tends to be
an exponential number of diagnoses.
G
G
Good
Good
F1
Fn
U
Candidates with
UNKNOWN failure modes
Candidates with
KNOWN failure U
modes
U
But “unknown” diagnoses represent a small fraction
of the probability density space.
Most of the density space may be approximated by
enumerating the few most likely diagnoses.
19
10/26/10
Diagnosing Dynamic Systems: Probabilistic
Constraint Automata
• Devices modes • Probabilistic transitions between modes
• State constraints for each mode
• One automata per component
vlv=stuck open => Outflow = Mz+(inflow);
vlv=open => Outflow = Mz+(inflow);
Stuck
open
Open
Open
Cost 5
Prob .9
Close
Stuck
closed
Closed
Vlv = closed => Outflow = 0;
10/28/07
Unknown
copyright Brian Williams, 2005-09
vlv=stuck closed=> Outflow = 0;
20
10
3/6/00
Estimating Dynamic Systems
S
T
Given sequence of commands and observations:
• Infer current distribution of (most likely) states.
• Infer most likely trajectories.
10/28/07
copyright Brian Williams, 2005-09
21
11
MIT OpenCourseWare
http://ocw.mit.edu
16.410 / 16.413 Principles of Autonomy and Decision Making
Fall 2010
For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.