Document 13326295
advertisement

Research Journal of Mathematics and Statistics 3(1): 1-11, 2011
ISSN: 2040-7505
© Maxwell Scientific Organization, 2011
Received: February 23, 2010
Accepted: April 09, 2010
Published: February 15, 2011
An Asymptotic Solution of a Fourth Order Critically Damped Nonlinear System
with Pair Wise Equal Eigenvalues
1
M. Abul Kawser and 2M.A. Sattar
Department of Applied Mathematics,
2
Department of Mathematics, Rajshahi University, Rajshahi-6205, Bangladesh
1
Abstract: In this study a fourth order nonlinear critically damped differential system is considered and an
analytical approximate solution is investigated for obtaining the transient response of the system in the case of
pair wise equal eigenvalues. The results obtained by the proposed technique agree with the numerical solutions
by means of the fourth order Runge-Kutta method nicely. An example is given to illustrate the method.
Key words: Asymptotic solution, critically damped system, perturbation solution
INTRODUCTION
Murty and Deekshatulu (1969b) also developed the
KBM method for solving fourth order over-damped
nonlinear systems. But their method is very difficult and
laborious. On the contrary, Akbar et al. (2002) proposed
a new technique for obtaining an asymptotic solution of
fourth order over-damped nonlinear systems which is
simple, methodical and easier than the method introduced
by Murty and Deekshatulu (1969b) and the results
obtained by Akbar et al. (2002) is similar to the results
obtained by Murty and and Deekshatulu (1969b). Soon
after, Akbar et al. (2003) have improved the method,
which is presented in Akbar et al. (2002) for fourth order
damped oscillatory nonlinear systems. But for the case of
fourth order critically damped nonlinear systems, Rokibul
et al. (2008b) extended the KBM method to obtain the
response of the systems.
In this study, we have investigated solutions of fourth
order critically damped nonlinear systems when the one
pair of eigenvalues are very small than another pair of
eigenvalues. The asymptotic results show good
coincidence with the numerical solutions for different sets
of initial conditions as well as different sets of
eigenvalues.
The Krylov-Bogoliubov-Mitropolskii (KBM)
(Bogoliubov and Mitropolskii, 1961; Krylov and
Bogoliubov, 1947) method is a vastly used technique to
investigate the transient behavior of vibrating systems.
However, the method was devised for obtaining the
periodic solutions of second order nonlinear differential
systems with small nonlinearities, Popov (1956) extended
the
method
to investigate the solutions of
damped oscillatory nonlinear systems. Murty and
Deekshatulu (1969a) investigated a technique using
Bogoliubov’s method to obtain the transient response of
over-damped nonlinear systems. Later, Murty (1971)
presented a unified KBM method for obtaining
approximate solutions of second order nonlinear systems,
which covers the undamped damped, and over-damped
cases. Sattar (1986) found an asymptotic solution of a
second order critically damped nonlinear system. Shamsul
(2001) has proposed a new asymptotic method for
obtaining approximate solutions of second order both
over-damped and critically damped nonlinear systems.
Osiniskii (1962) examined solutions based on
Bogoliubov’s method of third order nonlinear systems
imposing some restrictions on the parameters. As a result,
the solutions were over-simplified and gave incorrect
results. Mulholland (1971) removed these restrictions
and obtained desired solutions. First, Shamsul and
Sattar (1996) presented a perturbation technique based on
the KBM method for obtaining approximate solutions of
third order critically damped nonlinear systems. Later,
Shamsul (2002b) investigated solutions of third order
critically damped nonlinear systems whose unequal
eigenvalues are integral multiple. Rokibul et al. (2008a)
have also found a new technique for obtaining the
solutions of third order critically damped nonlinear
systems in the case when equal eigenvalues are large and
the unequal eigenvalue is small.
MATERIALS AND METHODS
Consider a fourth order weakly nonlinear ordinary
differential system:
iv
x ( ) + k1&&&
x + k 2 &&
x + k 3 x& + k 4 x = −εf ( x , x& , x&&, &&&
x ) (1)
where x (iv) stands for the fourth derivative and over dots
are used for the first, second and third derivatives of x
with respect to t. k1, k2, k3 and k4 are constants, , is a
sufficiently small parameter and f ( x , x& , &&
x , &&&
x ) is the
given nonlinear function. As the equation is of fourth
Corresponding Author: M. Abul Kawser, Department of Applied Mathematics, Rajshahi University, Rajshahi-6205, Bangladesh
1
Res. J. Math. Stat., 3(1): 1-11, 2011
order and we are considering a critically damped system,
the unperturbed Eq. of (1) has four real negative
eigenvalues, where pairwise eigenvalues are assumed to
be equal. Suppose the eigenvalues are -8, -8, -: and - :.
When g = 0, the Eq. (1) becomes linear and the solution
of the corresponding linear equation is:
a& ( t ) = ε A1 ( a , b, c, d , t ) +....
b&( t ) = ε B ( a , b, c, d , t ) +....
The Eq. in (4) are known as variational equations,
and KBM (1961, 1947) assumed that they are functions of
amplitude only. But later Akbar et al. (2006) showed that
if they are only functions of amplitude, sometimes the
solution gives incorrect results and thus they are functions
of both amplitude and phase. But in the case of nonoscillatory systems they are functions of amplitude only.
By considering only the first few terms in the series
expansions of (3) and (4), we calculate the functions ui
and Ai, Bi, Ci, Di where i = 1,2 ,..., n, such that a, b, c and
d appearing in (3) and (4) satisfy the given differential
Eq. (1) with an accuracy of order gn+1. In order to
determine these unknown functions, it is customary in the
KBM method that the correction terms ui, i = 1,2 ,..., n
must exclude secular terms, which make them large.
Theoretically, the solution can be obtained up to the
accuracy of any order of approximation. However, owing
to the rapidly growing algebraic complexity for the
derivation of the formulae, the solution is in general
confined to a lower order, usually the first-order because
, is very small (Murty, 1971).
In order to determine the unknown functions A1, B1,
C1 and D1 we differentiate the proposed solution (3),
fourth times with respect to t. Substituting the values of x
d& ( t ) = ε D1 (a , b, c, d , t )+ ....
and the derivatives x& , &&
in the original Eq. (1),
x , &&&
x, x
utilizing the relations presented in (4) and finally equating
the coefficients of g, we obtain:
x( t ,0) = ( a0 + b0t ) e − λ t + ( c0 + d 0t ) e − µ t (2)
where a0, b0, c0, d0 are integral constants.
But if g … 0, following Shamsul (2002d), an
asymptotic solution of (1) is chosen in the form:
( )
x t , ε = ( a + bt )e − λ t + ( c + dt )e − µ t
+ ε u1 (a , b, c, d , t )+ .....
(3)
where a, b, c, d are functions of t and they satisfy the first
order differential equations:
1
(iv )
c&( t ) = ε C1 ( a , b, c, d , t ) +....
(4)
⎛ ∂
⎞ ⎛ ∂ A1
⎞
⎛ ∂
⎞ ⎛ ∂ C1
⎞
∂ B1
∂ D1
⎜
+ µ − λ⎟ ⎜
+t
+ 2 B1 ⎟ + e − µ t ⎜
+ λ − µ⎟ ⎜
+t
+ 2 D1 ⎟
∂t
∂t
⎝∂t
⎠ ⎝ ∂t
⎠
⎝∂t
⎠ ⎝ ∂t
⎠
2
e
−λ t
2
2
2
⎛ ∂
⎞ ⎛ ∂
⎞
+⎜
+ λ⎟ ⎜
+ µ⎟ u1 = − f
⎝ ∂t
⎠ ⎝ ∂t
⎠
where f
( 0)
( a , b, c, d , t )
(5)
( 0) a , b, c, d , t = f x , x& , &&
(
) ( 0 0 x0 , &&&x0 ) and x0 = ( a + bt ) e − λ t + ( c + dt ) e − µ t
We have expanded the function f (0) in the Taylor’s series (Sattar, 1986; Shamsul, 2001, 2002b; Shamsul and
Sattar, 1996) about the origin in power of t. Therefore, we obtain:
f
( 0)
∞
⎧⎪
⎫
− (iλ + j µ )t ⎪
q
=
Fq , k (a , b, c, d )e
⎨t
⎬
⎪⎭
,
,
=
q=0 ⎪
i
j
k
0
⎩
∞
∑
∑
(6)
Here the limit of i, j and k are from 0 to 4. But for a particular problem they have some definite values. Thus using (6),
Eq. (5) becomes:
2
Res. J. Math. Stat., 3(1): 1-11, 2011
⎛ ∂
⎞ ⎛ ∂ A1
⎞
⎛ ∂
⎞ ⎛ ∂ C1
⎞
∂ B1
∂ D1
⎜
+ µ − λ⎟ ⎜
+t
+ 2 B1 ⎟ + e − µ t ⎜
+ λ − µ⎟ ⎜
+t
+ 2 D1 ⎟
∂t
∂t
⎝∂t
⎠ ⎝ ∂t
⎠
⎝∂t
⎠ ⎝ ∂t
⎠
2
e
−λ t
2
2
2
⎛ ∂
⎞ ⎛ ∂
⎞
+⎜
+ λ⎟ ⎜
+ µ⎟ u1 =
⎝ ∂t
⎠ ⎝ ∂t
⎠
∞
⎧⎪
⎫
− (iλ + j µ )t ⎪
q
Fq ,k (a , b, c, d )e
⎨t
⎬
⎪⎭
,
,
0
=
q=0 ⎪
i
j
k
⎩
∞
∑
∑
(7)
Following the KBM method, Murty and Deekshatulu (1969b), Sattar (1986), Shamsul (2002b), Shamsul and Sattar
(1996, 1997) imposed the condition that u1 does not contain the fundamental terms (the solution (2) is called the
generating solution and its terms are called the fundamental terms) of f (0). Therefore, Eq. (7) can be separated for
unknown functions A1, B1, C1, D1 and u1 in the following way:
⎛ ∂
⎞ ⎛ ∂ A1
⎞
⎛ ∂
⎞ ⎛ ∂ C1
⎞
∂ D1
∂ B1
⎜
+ µ − λ⎟ ⎜
+t
+ 2 B1 ⎟ + e − µ t ⎜
+ λ − µ⎟ ⎜
+t
+ 2 D1 ⎟
∂t
∂t
⎝∂t
⎠ ⎝ ∂t
⎠
⎠ ⎝ ∂t
⎝∂t
⎠
2
e
−λ t
2
∞
⎧⎪
⎫
− ( iλ + j µ ) t ⎪
q
(
)
t
F
a
,
b
,
c
,
d
e
⎨
⎬
q ,k
⎪⎭
q=0 ⎪
⎩ i , j ,k = 0
1
= −
∑
∑
(8)
and
2
2
∞ ⎧
∞
⎫
⎛ ∂
⎞ ⎛ ∂
⎞
⎪ q
− iλ + j µ ) t ⎪
⎜
Fq ,k (a , b, c, d )e (
+ λ⎟ ⎜
+ µ⎟ u1 = −
⎨t
⎬
⎝ ∂t
⎠ ⎝ ∂t
⎠
⎪⎭
,
,
0
=
q=0 ⎪
i
j
k
⎩
∑
∑
(9)
Now, equating the coefficients of t0 and t1 from both sides of Eq. (8), we obtain
⎞
⎞ ⎛ ∂ C1
⎞
⎛ ∂
⎞ ⎛ ∂ A1
⎛ ∂
⎜
+ 2 D1 ⎟
+ λ − µ⎟ ⎜
+ 2 B1 ⎟ + e − µ t ⎜
+ µ − λ⎟ ⎜
⎠
⎠ ⎝ ∂t
⎠
⎝ ∂t
⎠ ⎝ ∂t
⎝ ∂t
2
e
−λ t
∞
= −
2
∑ F ( a , b , c, d ) e ( λ
(10)
)
− i + jµ t
i , j ,k = 0
0, k
and
e
−λ t ⎛
2
∞
2
⎞ ∂ B1
⎛∂
⎞ ∂ D1
∂
F1, k ( a , b, c, d ) e − (iλ + j µ ) t
+ e − µ t ⎜ + λ − µ⎟
=−
⎜ + µ − λ⎟
⎝ ∂t
⎠ ∂t
⎝ ∂t
⎠ ∂t
i , j ,k = 0
∑
(11)
Here, we have only two Eq. (10) and (11) for determining the unknown functions A1, B1, C1 and D1 Thus, to obtain the
unknown functions A1, B1, C1 and D1, we need to impose some conditions (Shamsul, 2002a, b, c, d, 2003) between the
eigenvalues. Different authors imposed different conditions according to the behavior of the systems; such as in
Shamsul (2002a) imposed the condition i181 + i282 +...+ in8n # (i1 + i2 +....+ in) (81 + 82 +...+ 8n). In this study, we have
investigated solutions for the case 8>>:. Therefore, we shall be able to separate the Eq. (11) for two unknown functions
B1 and D1 and solving them for B1 and D1 substituting the values of B1 and D1 into the Eq. (10) and applying the
condition 8>>: we can separate the Eq. (10) for two unknown functions A1 and C1; and solving them for A1 and C1.
Since a& , b&, c&, d& are proportional to small parameter , they are slowly varying functions of time t and for first
approximate solution, we may consider them as constants in the right hand side. This assumption was first made by
Murty and Deekshatulu (1969b). Thus the solutions of the Eq. (4) become:
3
Res. J. Math. Stat., 3(1): 1-11, 2011
t
a = a0 + ε A1 (a , b, c, d , t )dt
∫
0
t
b = b0 + ε B1 (a , b, c, d , t )dt
∫
0
t
c = c0 + ε C1 (a , b, c, d , t )dt
∫
0
t
d = d 0 + ε D1 (a , b, c, d , t )dt
∫
(12)
0
Equation (9) is an inhomogeneous linear ordinary differential equation; therefore, it can be solved by the well-known
operator method. Substituting the values of a, b, c, d and u1 in the Eq. (3), we shall get the complete solution of (1).
Therefore, the determination of the first approximate solution is complete.
Example: As an example of the above method, we have considered the Duffing type equation of fourth order nonlinear
differential system:
iv
x ( ) + k1&&&
x + k 2 &&
x + k 3 x& + k 4 x = −ε x 3
Comparing (13) and (1), we obtain f ( x , x& , &&
x , &&&
x) = x
(
Therefore, f ( 0) = ae − λ t + ce − µ t
(13)
3
) 3 + 3t (ae − λt + ce − µt ) 2 (be − λt + de − µt )
(
)(
+ 3t 2 ae − λt + ce − µt be − λt + de − µt
)
2
(
+ t 3 be − λt + de − µt
)
3
(14)
Now, comparing Eq. (6) and (14), we obtain:
∞
∑ F ( a , b , c , d )e ( λ
i . j .k = 0
∞
∑ F ( a , b , c , d )e ( λ
i . j .k = 0
) = a 3 e − 3λ t + 3a 2 ce − (2 λ + µ )t + 3ac 2 e − ( λ + 2 µ )t + c 3 e − 3µ t
− i + jµ t
0, k
{
) = 3 a 2 be − 3λ t + (2abc + a 2 d )e − (2 λ + µ )t
− i + jµ t
1, k
+ b 2 c + 2acd e − ( λ + 2 µ )t + c 2 de − 3µ t
(
∞
∑F
2,k
i . j .k = 0
)
}
( a , b, c, d ) e − (iλ + jµ )t = 3{ab2 e − 3λt + (2abd + b2 c)e − (2λ + µ )t
(
)
+ ab 2 + 2bcd e − ( λ + 2 µ ) t + cd 2 e − 3µ t
4
}
Res. J. Math. Stat., 3(1): 1-11, 2011
∞
∑F
3, k
( a, b, c, d ) e −(iλ + jµ )t = b3e −3λt + 3b 2 de −(2λ + µ )t + 3bd 2 e −( λ + 2 µ ) t + d 3e −3µt
(15)
i , j ,k = 0
For Eq. (13), the Eq. (9)-(11), respectively become:
2
{
2
⎞
⎞ ⎛ ∂
⎛ ∂
⎜
+ µ⎟ u1 = − 3t 2 ab 2 e − 3λ t + 2abc + b 2 c e − ( 2 λ + µ ) t
+ λ⎟ ⎜
⎠
⎠ ⎝ ∂t
⎝ ∂t
(
)
+ ad 2 + 2bcd e − ( λ + 2 µ ) t + cd 2 e − 3µ t
(
)
}
{
− 2 λ + µ )t
− λ + 2 µ )t
− t 3 b 3e − 3λt + 3b 2 de (
+ 3bd 2 e (
+ d 3e − 3 µ t
e
−λ t
⎛ ∂
⎞
⎜
+ µ − λ⎟
⎝ ∂t
⎠
2
}
(16)
{
⎛ ∂
⎞ ∂ D1
∂ B1
+ e−µt ⎜
+ λ − µ⎟
= − 3 a 2 be − 3λ t + (2abc + a 2 d )e − ( 2 λ + µ ) t
∂t
⎝ ∂t
⎠ ∂t
2
+ (b 2 c + 2acd )e − ( λ + 2 µ ) t + c 2 de − 3µ t
}
(17)
and
⎞
⎛ ∂
⎞ ⎛ ∂ A1
⎞
⎛ ∂
⎞ ⎛ ∂ C1
⎜
+ µ − λ⎟ ⎜
+ 2 B1 ⎟ + e − µ t ⎜
+ λ − µ⎟ ⎜
+ 2 D1 ⎟
⎠
⎝ ∂t
⎠ ⎝ ∂t
⎠
⎝ ∂t
⎠ ⎝ ∂t
2
2
e
−λ t
{
= − a 3 e − 3λ t + 3a 2 ce − ( 2 λ + µ ) t + 3ac 2 e − ( λ + 2 µ ) t + c 3 e − 3µ t
When
(18)
}
λ >> µ , then from (17), we obtain:
⎛ ∂
⎞
⎜
+ µ − λ⎟
⎝ ∂t
⎠
2
{
∂ B1
= − 3 a 2 be − 2 λ t + (2abc + a 2 d )e − ( λ + µ ) t + (b 2 c + 2acd )e − 2 µ t
∂t
}
(19)
2
and
⎛∂
⎞ ∂ D1
= −3c 2 de − 2 µ t
⎜ + λ − µ⎟
⎝ ∂t
⎠ ∂t
(20)
The solution of the Eq. (19) is:
(
)
(
)
− λ +µ) t
B1 = r1 a 2be − 2 λ t + r2 2abc + a 2 d e (
+ r3 bc 2 + 2acd e − 2 µ t
where r1 =
3
2λ ( 3λ − µ )
2
, r2 =
3
4λ ( λ + µ )
2
, r3 =
(21)
3
2µ( λ + µ )
2
and from Eq. (20), we obtain:
D1 = lc 2 de − 2 µt
(22)
5
Res. J. Math. Stat., 3(1): 1-11, 2011
where l =
e
3
2 µ ( λ − 3µ )
2
. Putting the values of B1 and D1 from Eq. (21) and (22) into the Eq. (18), we get:
2
−λ t ⎛
2
⎞ ∂ A1
⎛∂
⎞ ∂ C1
∂
+ e − µ t ⎜ + λ − µ⎟
⎜ + µ − λ⎟
⎝ ∂t
⎠ ∂t
⎝ ∂t
⎠ ∂t
2
− 2λ + µ ) t
− λ +2µ ) t
= − a 3e − 3λ t − 3a 2 ce (
− 3ac 2 e (
− c 3e − 3µ t − 2r1a 2b( 3λ − µ ) e − 3λ t
− 8r2 λ2 (2abc + a 2 d )e − ( 2 λ + µ ) t − 2r3 λ + µ
(
) 2 (bc 2 + 2acd )e − (λ + 2 µ )t − 2lc 2 d (λ − 3µ ) 2 e − 3µ t
(23)
Since the relation 8>>: exists among the eigenvalues, then the Eq. (23) can be separated for the unknown functions A1
and C1 in the following way:
⎛ ∂
⎞
⎜
+ µ − λ⎟
⎝ ∂t
⎠
2
∂ A1
2
= − a 3 e − 2 λ t − 3a 2 ce − ( λ + µ ) t − 3ac 2 e − 2 µ t − 2r1a 2 b(3λ − µ ) e − 2 λ t
∂t
(
)
(
)
2
− λ+µ)t
− 8r2 λ2 2abc + a 2 d e (
− 2r3 ( λ + µ ) bc 2 + 2acd e − 2 µ t
(24)
2
⎛∂
⎞ ∂ C1
2
= − c 3e − 2 µ t − 2lc 2 d ( λ − 3µ ) e − 2 µ t
⎜ + µ − λ⎟
⎝ ∂t
⎠ ∂t
(25)
Solving Eq. (24) and (25), we obtain:
− λ +µ )t
A1 = s1a 3e − 2 λ t + s2 a 2 ce (
+ s3ac 2 e − 2 µ t + s4 a 2be − 2 λ t
− λ +µ )t
+ s 2abc + a 2 d e (
+ s b 2 c + 2acd e − 2 µ t
5
(
)
6
(
)
(26)
C1 = m1c 3e − 2 µt + m2 c 2 de − 2 µt
where s1 =
s5 =
1
2λ ( 3λ − µ )
3
2λ2 ( λ + µ )
2
2
,
s2 =
, s6 =
(27)
3
4λ ( λ + µ )
2
3
2µ 2 ( λ + µ )
2
,
s3 =
, m1 =
and the solution of the Eq. (16) is:
6
3
2 µ( λ + µ )
1
2 µ ( λ − 3µ )
2
2
,
s4 =
, m2 =
3
2λ2 ( 3λ − µ )
3
2 µ 2 ( λ − 3µ )
2
2
Res. J. Math. Stat., 3(1): 1-11, 2011
(
)
(
)(
)
u1 = ab 2 q1t 2 + q2 t + q3 e − 3λ t + 2abc + b 2 c q4 t 2 + q5t + q6 e − ( 2 λ + µ ) t
(
)(
)
(
)
+ ad 2 + 2bcd q7 t 2 + q8 t + q9 e − ( λ + 2 µ ) t + cd 2 q10 t 2 + q11t + q12 e − 3µ t
(
)
(
)
+ b 3 q13t 3 + q14 t 2 + q15t + q16 e − 3λ t + b 2 d q17 t 3 + q18 t 2 + q19 t + q20 e − ( 2 λ + µ ) t
(
)
(
)
+ bd 2 q21t 3 + q22 t 2 + q23t + q24 e − ( λ + 2 µ ) t + d 3 q25t 3 + q26t 2 + q27 t + q28 e − 3µ t
where
q1 =
−3
4λ2 ( 3λ − µ )
q3 =
q4 =
4λ2 ( 3λ − µ )
−3
4λ2 ( λ + µ )
2
, q5 =
2
4λ2 ( λ + µ )
4µ 2 ( λ + µ)
q10 =
q12 =
−3
4µ 2 ( λ + µ)
2
−3
4 µ 2 ( 3µ − λ )
−3
4 µ 2 ( 3µ − λ )
4λ2 ( 3λ − µ )
4λ 2 ( λ + µ )
2
2
−3
4µ 2 ( λ + µ )
2
2
⎧2
4 ⎫
⎨ +
⎬,
⎩µ λ + µ ⎭
⎧
⎫
4
6
⎪ 3
⎪
+
+
,
⎨ 2
2 ⎬
+
µ
λ
µ
(
)
µ
2
⎪
( λ + µ ) ⎪⎭
⎩
, q11 =
2
−1
2
⎧2
4 ⎫
⎨ +
⎬,
⎩λ λ + µ ⎭
−3
, q8 =
2
4λ2 ( 3λ − µ )
⎧2
4 ⎫
⎬,
⎨ +
⎩ λ 3λ − µ ⎭
⎧⎪ 3
⎫⎪
4
6
+
+
,
⎨ 2
2 ⎬
+
λ
λ
µ
(
)
2
λ
⎪⎩
( λ + µ ) ⎪⎭
2
−3
−3
⎧
⎫
4
6
⎪ 3
⎪
+
⎨ 2 +
⎬,
2
λ ( 3λ − µ ) ( 3λ − µ ) ⎪
λ
2
⎪
⎩
⎭
−3
q9 =
q13 =
2
−3
q6 =
q7 =
, q2 =
−3
4 µ 2 ( 3µ − λ )
2
⎧2
4 ⎫
⎬,
⎨ +
⎩ µ 3µ − λ ⎭
⎧
⎫
4
6
⎪ 3
⎪
+
+
,
⎨ 2
2 ⎬
3
µ
µ
λ
−
(
)
2
µ
3
µ
λ
−
⎪
(
) ⎪⎭
⎩
, q14 =
−1
4λ2 ( 3λ − µ )
7
2
⎧3
6 ⎫
⎬,
⎨ +
⎩ λ 3λ − µ ⎭
(28)
Res. J. Math. Stat., 3(1): 1-11, 2011
q15 =
4λ2 ( 3λ − µ )
4λ2 ( 3λ − µ )
−3
q17 =
4λ2 ( λ + µ )
q19 =
2
⎧
⎫
9
18
24
⎪ 3
⎪
+
+
,
⎨ 3 + 2
2
3⎬
λ
λ
λ
µ
−
3
(
)
λ
λ
µ
λ
µ
−
−
3
3
⎪
⎪
(
)
(
)
⎩
⎭
, q18 =
4λ2 ( λ + µ )
4λ2 ( λ + µ )
2
4µ 2 ( λ + µ)
q 24 =
2
4λ 2 ( λ + µ )
2
⎧
12
18 ⎫
⎪ 9
⎪
+
+
,
⎨ 2
2 ⎬
λ
λ
µ
+
(
)
λ
2
λ
µ
+
⎪
(
) ⎪⎭
⎩
2
, q 22 =
−3
4µ 2 ( λ + µ )
2
4µ 2 ( λ + µ)
4 µ 2 ( 3µ − λ )
2
4µ 2 ( λ + µ)
2
⎧3
6 ⎫
⎬,
⎨ +
⎩µ λ + µ ⎭
⎧
9
18
24 ⎫
⎪ 3
⎪
+
+
+
,
⎨ 3
2
2
3⎬
µ
µ
λ
µ
+
(
)
µ
λ
µ
λ
µ
+
+
⎪
(
) (
) ⎪⎭
⎩
2
, q26 =
−1
4 µ 2 ( 3µ − λ )
−3
⎧
12
18 ⎫
⎪
⎪ 9
+
+
,
⎨ 2
2⎬
+
µ
λ
µ
(
)
2
µ
⎪
( λ + µ ) ⎪⎭
⎩
−3
−1
q 27 =
⎧3
6 ⎫
⎨ +
⎬,
⎩λ λ + µ ⎭
−3
⎧
9
18
24 ⎫
⎪
⎪3
,
+
+
⎨ 3+ 2
2
3⎬
λ
λ
λ
µ
+
(
)
λ
λ
µ
λ
µ
+
+
⎪
⎪
(
)
(
)
⎭
⎩
−3
q23 =
2
−3
−3
q 21 =
q25 =
2
−1
q16 =
q20 =
⎧
⎫
12
18
⎪ 9
⎪
+
⎨ 2 +
⎬,
2
λ ( 3λ − µ ) ( 3λ − µ ) ⎪
2
λ
⎪
⎩
⎭
−1
2
−1
4 µ 2 ( 3µ − λ )
2
⎧3
6 ⎫
⎨ +
⎬,
⎩ µ 3µ − λ ⎭
⎧
⎫
12
18
⎪ 9
⎪
+
+
,
⎨ 2
2 ⎬
3
µ
µ
λ
−
(
)
2
µ
3
µ
λ
−
⎪
(
) ⎪⎭
⎩
8
Res. J. Math. Stat., 3(1): 1-11, 2011
q28 =
−1
4 µ 2 ( 3µ − λ )
2
⎧
⎫
9
18
24
⎪ 3
⎪
+
+
⎨ 3+ 2
2
3⎬
µ
µ ( 3µ − λ ) µ ( 3µ − λ )
( 3µ − λ ) ⎪⎭
⎪
⎩
Substituting the values of A1, B1,C1 and D1 from Eq. (26), (21), (27) and (22) into Eq. (4), we obtain:
{
− λ +µ t
a& = ε s1a 3e − 2 λ t + s2 a 2 ce ( ) + s3ac 2 e − 2 µ t + s4 a 2be − 2 λ t
(
) }
) + r bc + 2acd e
(
) }
)
(
+ r (2abc + a d )e (
+ m c de
}
− λ +µ t
+ s5 2abc + a 2 d e ( ) + s6 bc 2 + 2acd e − 2 µ t
{
b& = ε r1a 2be − 2 λ t
{
c& = ε m1c 3e − 2 µ t
2
− λ +µ t
2
2
−2 µt
2
(29)
3
−2 µt
2
d& = εlc 2 de − 2 µ t
Here all of the Eq. of (29) have no exact solutions, but since a& , b&, c&, d& are proportional to the small parameter g,
so they are slowly varying functions of time t. Consequently, it is possible to replace a, b, c, d by their respective values
obtained in linear case (i.e., the values of a, b, c, d obtained when g = 0) in the right hand side of Eq. (29). This type of
replacement was first introduced by Murty and Deekshatulu (1969a, b) to solve similar type of nonlinear equations.
Therefore, the solution of (29) is:
− ( λ + µ )t
− 2λt
⎧⎪
1 − e − 2µt
3 1− e
2 1− e
a = a 0 + ε ⎨ s1a
+ s2 a c
+ + s3 ac 2
λ+ µ
2λ
2µ
⎪⎩
1 − e − 2λt
1 − e − ( λ + µ )t
1 − e − 2µt
2
2
+ s4 a b
+ s5 2abc + a d
+ s6 bc + 2acd
λ+ µ
2λ
2µ
(
2
)
(
)
⎫⎪
⎬
⎭⎪
⎧⎪
1 − e − 2µt
1 − e − 2λt
1 − e − ( λ + µ )t
+ r3 bc 2 + 2acd
b = b0 + ε ⎨ r1a 2 b
+ r2 2abc + a 2 d
2µ
λ+ µ
2λ
⎪⎩
− 2µt
− 2µt ⎫
⎧⎪
⎪
3 1− e
2 1− e
c = c0 + ε ⎨ m1 c
+ m2 c d
⎬
2µ
2 µ ⎪⎭
⎪⎩
(
)
(
)
⎫⎪
⎬
⎪⎭
(30)
1 − e − 2µt
d = d 0 + εlc d
2µ
2
Hence, we obtain the first approximate solution of the Eq. (13) as:
x( t , ε ) = ( a + bt ) e − λt + ( c + dt ) e − µt + εu1
(31)
where a, b, c and d are given by the Eq. (30) and u1 is given by (28).
9
Res. J. Math. Stat., 3(1): 1-11, 2011
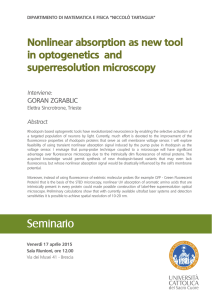
0.7
calculated from Eq. (30) and (28) is used to obtain u1
when , = 0.1, together with the initial conditions
a0 = 0.40, b0 = 0.20, c0 = 0.30, d0 = 0.15 (or x(0)
=0.663846, x& (0) = -0.866265, &&
x (0) = 1.999570, &&&
x (0)
= -4.251507). The results obtained from (31) for various
values of t and the corresponding numerical results
obtained from a fourth order Runge-Kutta method are
presented in the Fig. 1.
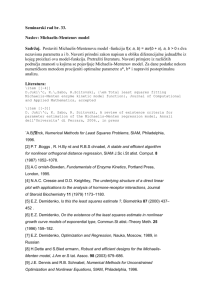
Next we have considered 8 = 2.8, : = 0.5, and
calculated x(t, ,) using Eq. (31) with initial conditions a0
= 0.50, b0 = 0.30, c0 = 0.40, d0 = 0.20 and the
results are plotted in the Fig. 2. Finally, we have
calculated x(t, ,) using Eq. (31) by considering 8 = 2.5, :
= 0.3 with initial conditions a0 = 0.20, b0 = 0.10, c0 =
0.30, d0 = 0.20 and the results are plotted in the Fig. 3.
In the KBM method generally many errors occur in
the case of rapid changes. From the above figures, we see
that in the time period t = 0.0 to t = 5.0, x changes rapidly,
but the results show good coincidence in this case also.
Numerical result
Perturbation result
0.6
X
0.5
0.4
0.3
0.2
0.1
0.0
0.5
1.0
1.5
2.0
2.5
t
3.0
3.5
4.0
4.5
5.0
Fig. 1: Comparison between perturbation and numerical results
for g = 0.1 with the initial conditions a0 = 0.40,
b0 = 0.20, c0 = 0.30, d0 = 0.15
0.9
Numerical result
0.8
Perturbation result
0.7
X
0.6
CONCLUSION
0.5
0.4
An analytical approximate solution based on the
theory of KBM for fourth order critically damped
nonlinear systems is investigated in this article. The
solutions for different sets of initial conditions as well as
different sets of pair wise equal eigenvalues show
excellent coincidence with those results obtained by
numerical method.
0.3
0.2
0.1
0.0
0.5
1.0
1.5
2.0
2.5
t
3.0
3.5
4.0
4.5
5.0
Fig. 2: Comparison between perturbation and numerical results
for g = 0.1 with the initial conditions a0 = 0.50,
b0 = 0.30, c0 = 0.40, d0 = 0.20
0.5
REFERENCES
Numerical result
Akbar, M.A., M.A. Shamsul and M.A. Sattar, 2002. An
asymptotic method of krylov-bogoliubovmitropolskii for fourth order over-damped nonlinear
systems. Ganit-J. Bangladesh Math. Soc., 22: 83-96.
Akbar, M.A., M.A. Shamsul and M.A. Sattar, 2003.
Asymptotic method for fourth order damped
nonlinear systems, Ganit-J. Bangladesh Math. Soc.,
23: 41-49.
Akbar, M.A., M.A. Shamsul and M.A. Sattar, 2006.
Krylov-bogoliubov-mitropolskii unified method for
solving n-th order non-linear differential equation
under some special conditions including the case of
internal resonance. Int J. Non-linear Mech., 41:
26-42.
Bogoliubov, N.N. and Y. Mitropolskii, 1961. Asymptotic
Methods in the Theory of Nonlinear Oscillations.
Gordan and Breach, New York.
Krylov, N.N. and N.N. Bogoliubov, 1947. Introduction to
Nonlinear Mechanics. Princeton University Press,
New Jersey.
Mulholland, R.J., 1971. Nonlinear Oscillations of Third
Order Differential Equations. Int. J. Nonlinear
Mechanics, 6: 279-294.
Perturbation result
X
0.4
0.3
0.2
0.0
0.5
1.0
1.5
2.0
2.5
t
3.0
3.5
4.0
4.5
5.0
Fig. 3: Comparison between perturbation and numerical results
for g = 0.1 with the initial conditions a0 = 0.20,
b0 = 0.10, c0 = 0.30, d0 = 0.20
RESULTS
To test the accuracy of the approximate solution
obtained by a certain perturbation method, we compare
the result to the numerical one. First, we have considered
the eigenvalues 8 = 3.0 and : = 0.4, as 8>>:. We have
computed x(t, ,) using Eq. (31) in which a, b, c and d are
10
Res. J. Math. Stat., 3(1): 1-11, 2011
Murty, I.S.N. and B.L. Deekshatulu, 1969a. Method of
variation of parameters for over-damped nonlinear
systems. J. Control, 9(3): 259-266.
Murty, I.S.N. and B.L. Deekshatulu, 1969b. On an
asymptotic method of krylov-bogoliubov for overdamped nonlinear systems, J. Frank. Inst., 288:
49-65.
Murty, I.S.N., 1971. A unified krylov-bogoliubov method
for solving second order nonlinear systems. Int. J.
Nonlinear Mech., 6: 45-53.
Osiniskii, Z., 1962. Longitudinal, torsional and bending
vibrations of a uniform bar with nonlinear internal
friction and relaxation, Nonlin. Vib. Probl., 4:
159-166.
Popov, I.P., 1956. A Generalization of the Bogoliubov
Asymptotic Method in the Theory of Nonlinear
Oscillations (in Russian), Dokl. Akad. USSR, 3:
308-310.
Rokibul, I.M., M.A. Akbar and M. Samsuzzoha, 2008a.
A new technique for third order critically damped
nonlinear systems. J. Appl. Sci. Res., 4(6): 695-706.
Rokibul, I.M., M.A. Akbar and M. Samsuzzoha, 2008b.
New technique for fourth order critically damped
non-linear systems with some conditions. Bull. Cal.
Math. Soc., 100(12).
Sattar, M.A., 1986. An asymptotic method for second
order critically damped nonlinear equations. J. Frank.
Inst., 321: 109-113.
Shamsul, A.M. and M.A. Sattar, 1996. An asymptotic
method for third order critically damped nonlinear
equations. J. Math. Phys. Sci., 30: 291-298.
Shamsul, A.M. and M.A. Sattar, 1997. A unified krylovbogoliubov-mitropolskii method for solving third
order nonlinear systems. Indian J. Pure Appl. Math.,
28: 151-167.
Shamsul, A.M., 2001. Asymptotic methods for second
order over-damped and critically damped nonlinear
systems. Soochow J. Math., 27: 187-200.
Shamsul, A.M., 2002a. Method of solution to the n-th
order over-damped nonlinear systems under some
special conditions. Bull. Cal. Math. Soc., 94(6):
437-440.
Shamsul, A.M., 2002b. Bogoliubov's method for third
order critically damped nonlinear systems. Soochow
J. Math., 28: 65-80.
Shamsul, A.M., 2002c. On some special conditions of
third order over-damped nonlinear systems. Indian J.
Pure Appl. Math., 33: 727-742.
Shamsul, A.M., 2002d. A unified krylov-bogoliubovmitropolskii method for solving n-th order nonlinear
systems. J. Frank. Inst., 339: 239-248.
Shamsul, A.M., 2003. On some special conditions of
over-damped nonlinear systems. Soochow J. Math.,
29: 181-190.
11