Document 13290157
advertisement

Research Journal of Applied Sciences, Engineering and Technology 4(23): 5230-5235, 2012
ISSN: 2040-7467
© Maxwell Scientific Organization, 2012
Submitted: May 01, 2012
Accepted: May 22, 2012
Published: December 01, 2012
Model Following Control for Nonlinear System with Time Delay
Shujing Wu and Dazhong Wang
Shanghai University of Engineering Science, Shanghai, China
Abstract: In this study, designing method of Model Following Control System (MFCS) for nonlinear system
with time delay and disturbances is discussed. The design of the control system is constructed. The features of
this design method are: Bounded property of the inner states for the control system is given and the utility of
this control de because there is no necessary to make transformation of this system; It is confirmed on basis of
a num sign is guaranteed; Both the physical structure of the system and the physical system variables properties
can be preserved because there is no necessary to make transformation of this system; It is confirmed on basis
of a numerical example that the output signal of the control system asymptotically follows the reference model
signal in the case of the existence of disturbances.
Keywords: Model following control system, nonlinear system, time delay
INTRODUCTION
Metallurgical processing systems, transmission
systems, environmental systems, power systems, chemical
processing systems and communication systems are all
examples of time delay systems (Nazario and Jaime,
2002; Abdellah and Ahmed, 2011; Shi et al., 2001). Also,
it has been shown that the existence of time delay usually
becomes the source of instability and deteriorates the
performance of systems. In recent years, such systems
have attracted recurring interest of research community.
Much of the research study has been focused on stability
analysis and the stabilization of time delay systems using
the so-called Lyapunov-Krasovskii functional and the
Linear Matrix Inequality (LMI) approach (Zhang and Xie,
2007). The time delay resulted in unpredictable outside
disturbances to the system and therefore, it is the dynamic
element that is hardest to control in the control system.
The neutral system has been studied as on robust stability
of neutral systems with time-varying discrete delay and
norm-bounded uncertainty (Han, 2004). The State
Predictive Model Following Control System for the
Linear Time delays is discussed (Wang and Okubo,
2009). It was proposed by (Wu et al., 2008; Wu et al.,
2011; Wang and Okubo, 2008) for a family of plants with
separable linear and nonlinear part.
In previous studies, a method of linear MFCS for
time delays system was proposed by (Akiyama et al.,
1998). In this study, the method of linear MFCS will be
extended to nonlinear system with time delay. The design
of the control system is performed using an easy algebraic
algorithm of matrices whose elements are polynomials of
the operator. The bounded property of internal states for
the control system is given and the utility of this control
design is guaranteed. The paper studied model following
design on the difference differential equation configured
by the control system, established input signal that could
automatically compensate time delay of the system and
there by effectively removed influence caused by outside
disturbances on the control system. We set the nonlinear
parts f(:(t)) of the controlled object as ||f(:(t))||#"+
$||:(t)||( and show the bounded property of inner states by
separating the nonlinear part into 0 # ( < 1. In this case,
the effectiveness of this method has verified by a
numerical example and simulations.
METHODOLOGY
The expression of problems: The controlled object is
described in (1), (2) and (3):
x&(t ) =
+
k
k
i=0
i=0
∑ Ai x(t − ih) + ∑ Ai' x&(t − ih)
(1)
k
∑ Bi u(t ) + B f f ( µ (t )) + d (t )
i=0
y( t ) =
k
∑ C x( t − ih) + d
i=0
µ (t ) =
i
0
(t )
k
∑ C fi x(t − ih)
i=0
where,
x(t), Rn, d(t), Rn, u(t), Rl , y(t), Rl,
d0(t) , Rl, :(t), Rlf, f(:(t)) , Rlf
Corresponding Author: Shujing Wu, Shanghai University of Engineering Science, Shanghai, China
5230
(2)
(3)
Res. J. Appl. Sci. Eng. Technol., 4(23): 5230-5235, 2012
The available states are output y(t) and measurement
output :(t). d(t) is state uncertainty or bounded
disturbance which is assumed to be repeatable, d0(t)is
output uncertainty or bounded disturbance signal which is
assumed to be repeatable. t is the time. The nonlinear
function f(:(t)) is available and satisfies the following
constraint:
||f (:(t)) || # " + $|| :(t)||(
(4)
C( ρ ) =
(5)
ym (t) = Cm xm (t)
(6)
C(D)[pE (D)!A(D)]!1 B(D) = N(D, p)/D (D, p)
C(D)[pE (D)!A(D)]!1 Bf = Nf (D, p)/D (D, p)
Here, D (D, p) = | pE(D)! A(D)|, Dm(p) = | pI!Am|.
Then the representations of input-output equation are
described as followings:
(7)
Design of nonlinear model following control system:
Let:
D = (D0, D1, D2, ..., Dk)T, Di = e!pih, Di x(t) = x(t!ih)
From this, system (1), (2), (3) are given in system (8)(10):
E ( ρ ) x&(t ) = A( ρ ) x(t ) + B( ρ )u(t )
+ B f f ( µ (t )) + d (t )
(8)
y(t) = C(D) x(t) + d0 (t)
(9)
:(t) = Cf(D) x(t)
B( ρ ) =
k
∑ Ai ρi
i=0
(11)
Dm (p) ym(t) = Nm(p) rm(t)
(12)
w(t) = C (D) adj [pE (D) !A(D)]d(t)
+ D(F, p)d0(t)
(13)
Nf (D, p) = C (D) adj [pE (D)!A(D)] B(D) (14)
and
A( ρ ) =
D (D, p) y (t) = N (D, p) u(t)
+ Nf (D, p) f(:(t)) + w(t)
Define N(D, p), Nf (D, p), Nm (D), Nr (D) as:
P = d/dt
E = (ρ) = I +
i=0
Then the transfer function of controlled system and
model are as:
converges to zero asymptotically.
where,
k
∑ C f ρi
Cm(D) [pI !Am]!1 B(D) = Nm(p) / Dm(p)
In this study, we propose a design of model following
control system for nonlinear system with disturbances.
We can proof that all the internal states are bounded and
output error:
e (t) = y(t) ! ym(t)
i=0
C f (ρ ) =
where, " $ 0 $, $ 0, ||.|| is Euclidean norm. The reference
model is given (5) and (6):
x&m (t ) = Am xm (t ) + Bmrm (t )
k
∑ Ci ρi
k
∑ A'ρi
i=0
Nf (D,p) = C (D) adj [pE (D)!A(D)]Bf
(15)
Nm (p) = Cm adj[pI !Am]Bm
(16)
N r ( ρ ) = N r ( ρ ) + N$ r
(17)
~
~
~
where, Mri N (D, p) < 0i, Mri N (D, p) < 0fi, , Mri N m (p) <
0mi, (i = 0, 1, ..., l) is assumed to be regular. The
disturbances d(t) and d0(t) are satisfy the following
conditions:
Dd (p) d(t) = 0, Dd (p) d0(t) = 0
(18)
(10)
where, Dd (p) is a scalar characteristic polynomial of
disturbances, 2Dd (p) = nd and Dd (p) is monic polynomial,
thus Dd (p)w(t) = 0. Choose a stable polynomial T(p)
which satisfy the following condition:
Degree of T(p) is * $ nd + 2n ! nm!1!0i; The
coefficient of maximum degree term of T(p) is the same
as D(p), R(D, p) and S(D, p) can be obtained:
k
∑ Bi ρi
T(p)Dm(p) = Dd(p)D(D, p)R(D, p) + S(D, p)
i=0
5231
(19)
Res. J. Appl. Sci. Eng. Technol., 4(23): 5230-5235, 2012
−1
H1( ρ )[ pI − F1] G1 = N$ r− 1Q − 1( p)
Degree of each term as the following:
{
(26)
}
⋅ Dd ( p) R( ρ , p) N ( ρ , p) − Q( p) N r ( ρ )
MT (p) = *, MDm(p) = nm, MDd (p) = nd,
MD(D, p) = n, MR(D, p) = * + nm ! nd ! n,
MS(D, p) # nd + n!1
J2 ( ρ ) + H2 ( ρ )[ pI − F2 ] G2
−1
(27)
= N$ r− 1Q − 1( p)S ( ρ , p)
From (7), (11), (12) and (19), we can get easily:
T ( p) Dm ( p)e(t ) = Dd ( p) D( ρ , p) R( ρ , p) y(t )
+ S ( ρ , p) y(t ) − T ( p) N m ( p)rm (t )
J3 ( ρ ) + H3( ρ )[ pI − F3 ] G3
−1
(28)
= N$ r−1Q − 1( p) Dd ( p) R( ρ , p) N f ( ρ , p)
(20)
J4 ( ρ ) + H4 ( ρ )[ pI − F4 ] G4
−1
We can rewrite e(t) as:
{ [
]}{[ D ( p)R( ρ, p) N ( ρ, p)
e( t ) = 1 / T ( p) Dm ( p)
]
d
− Q( p) N r ( ρ ) u( t ) + Dd ( p) R( ρ, p) N f ( ρ , p) f ( µ( t ) )
+ Q( p) N r ( ρ) u( t ) + S ( ρ, p) y( t )
The followings must be satisfied:
(21)
}
− T ( p) N m ( p)rm ( t )
and
(
Q( p) = diag p
~
∂ri Q( p) < δ + nm − n + ηi
δ + nm − n + ηi
)
~
+ Q( p),
So, u(t) can be obtained by letting the right-hand side
of (21) be equal to zero:
}
(22)
u( t ) = − E 0 ( ρ ) u( t ) − H1 ( ρ )ξ1 ( t )
(31)
ξ&3 (t ) = F3ξ3 (t ) + G3 f ( µ (t ))
(32)
ξ&4 (t ) = F4ξ4 (t ) + G4rm (t )
(33)
⎡ E (ρ )
⎢
0
d ⎢⎢
0
dt ⎢
⎢ 0
⎢ 0
⎣
0 0 0 0⎤ ⎡ x(t ) ⎤
⎥
⎥⎢
| 0 0 0⎥ ⎢ ξ1(t ) ⎥
⎢
⎥
0 | 0 0⎥ ⎢ ξ2 (t )⎥
⎥
0 0 | 0⎥ ⎢ ξ3 (t ) ⎥
⎢
⎥
0 0 0 0⎥⎦ ⎢ u(t ) ⎥
⎣
⎦
0
F1
0
0
0
0
0
0
F2
0
0
F3
H1( ρ ) − H2 ( ρ ) − H3 ( ρ )
(24)
⎡
⎢
⎢
+⎢
⎢
⎢
⎢−
⎣
Here,
E0 ( ρ ) = N$ r− 1 N r ( ρ )
ξ&2 (t ) = F2ξ2 (t ) + G2 y(t )
⎡
A( ρ )
⎢
0
⎢
= ⎢ G2C( ρ )
⎢
0
⎢
⎢− J ρ C ρ −
⎣ 2( ) ( )
(23)
− E 3 ( ρ ) f ( µ( t ) ) − H 3 ( ρ)ξ3 ( t ) + u( t )
um (t ) = J4 ( ρ )rm (t ) + H4 ( ρ )ξ4 (t )
(30)
where, |pI!Fi| = |Q(p)|, (i = 1, 2, 3, 4). If the internal states
of control system are bounded, the design of MFCS for
nonlinear system can be realized.
where, i = 1, 2, ..., l and N$ r ≠ 0 , nm!0mi $ n ! 0i, $ 0fi .
Control input u(t) can be described using internal states as
followings:
+ E 2 ( ρ ) y( t ) − H 2 ( ρ )ξ2 ( t )
ξ&1(t ) = F1ξ1(t ) + G1u(t )
Bounded property of internal states: System inputs are
reference input signal rm(t) and disturbances d(t), d0(t)
which are all assumed to be bounded. The bounded can be
easily proved if there is no nonlinear par f(:(t)). But if
f(:(t)) exists, the bounded has relation with it.
First, the overall system can represented by state
space in (34):
{
)
)
u( t ) = − N r−1 N r ( ρ) u( t ) − N r−1Q −1 ( ρ) Dd ( ρ ) R( ρ, p) N ( ρ, p)
)
− Q( p) N r ( ρ) u( t ) − N r−1Q − 1 ( p) Dd ( p) R( ρ, p)
) −1 −1
⋅ N f ( ρ , p ) f ( µ ( t ) ) − N r Q ( p) S ( ρ , p ) y ( t )
)
+ N r−1Q −1 ( p)T ( p) N m ( p)rm ( t )
(29)
= N$ r− 1Q − 1( ρ )T ( ρ ) N m ( ρ )
(25)
5232
⎤
⎥
⎥
⎥ f ( µ (t )) +
⎥
G3 ⎥
J3 ( ρ )⎥⎦
Bf
0
0
⎡
⎤
d (t )
⎢
⎥
0
⎢
⎥
⎢
⎥
G2d0 (t )
⎢
⎥
0
⎢
⎥
⎢ u (t ) − J ( ρ )d (t )⎥
2
0 ⎦
⎣ m
⎤ ⎡ x (t ) ⎤
⎥
⎥⎢
⎥ ⎢ ξ1(t ) ⎥
⎢
⎥ ξ ( t )⎥
0
⎥⎢ 2 ⎥
0
⎥ ⎢ ξ3(t ) ⎥
⎥
⎢
− I − E0 − H1( ρ )⎥⎦ ⎢ u(t ) ⎥
⎦
⎣
B( ρ )
G1
(34)
Res. J. Appl. Sci. Eng. Technol., 4(23): 5230-5235, 2012
where, zT (t) = [x(t), >1(t), >2(t), >3, u(t)]T. Necessary part
about bounded property is considered, state space can be
simplified as:
E ( ρ ) z&( t ) = As ( ρ) z( t ) + Bs ( ρ) f ( µ( t ) ) + d s ( t )
(35)
y(t) = C(D) x(t) + d0(t)
(36)
:(t) = Cs (D) z(t)
(37)
Cs (D) = [Cf (D), 0 ,0, 0, 0]
(38)
⎡ Bs1( ρ ) ⎤
⎥
XBs ( ρ ) = ⎢
⎢⎣ Bs2 ( ρ )⎥⎦
⎡ d s1(t ) ⎤
Xd s (t ) = ⎢
⎥
⎢⎣ d s2 (t )⎥⎦
So, we have:
⎡ I 0⎤ ⎡ z&1(t ) ⎤ ⎡ As1( ρ ) 0⎤ ⎡ z (t )⎤
⎥
⎥⎢
⎢ 0 0⎥ ⎢ & ⎥ = ⎢
I ⎥⎦ ⎢⎣ z (t )⎥⎦
⎣
⎦ ⎢⎣ z2 (t )⎥⎦ ⎢⎣ 0
⎡ Bs1( ρ )⎤
⎡ d s1(t ) ⎤
⎥ f ( µ (t )) ⎢
+⎢
⎥
⎢⎣ Bs1( ρ )⎥⎦
⎢⎣ d s2 (t )⎥⎦
We prove that As(D) is stable. As(D) and its
characteristic polynomial is calculated as the followings:
(42)
The state-space realization of (42) becomes:
pE ( ρ ) − As ( ρ ) = N$ r
−1
T ( p) Dm ( p) Q( p) Vs ( ρ, p) (39)
l
l
2
where, Vs(D, p) is the zeros polynomial of
C(D)[pE(D)!A(D)]!1B(D) = W(D, p)!1 U(D, p)|, that is Vs(D,
p) = |U(D, p)| / | Nr(D)|. As |Q(p)|, Vs(D, p), |T (p)|, |Dm (p)|,
are all stable polynomials. Therefore, As(D) is a stable
system matrix. In order to obtain desired conclusion, it is
sufficient to prove that z(t) is bounded. The nonlinear
function is available and satisfies constraint. We set the
nonlinear parts f(:(t))) of the controlled object as ||
f(:(t))|| # " + $ || :(t) ||( and show the bounded property
of inner states by separating the nonlinear part into " $ 0,
$ $ 0, 0 # ( <1.
To use regular transformation z(t) = Y z (t) and X,
from (35), we can be rewritten as followings:
XE ( ρ )Yz& ( t ) = XAs ( ρ )Yz ( t ) + XBs ( ρ ) f ( µ( t ) ) + Xd s ( t )
z&1 ( t ) = As1 ( ρ ) z1 ( t ) + Bs1 ( ρ ) f ( µ( t ) ) + d s1 ( t )
(43)
z2 (t ) = − Bs2 ( ρ ) f ( µ (t )) − d s2 (t )
(44)
From (42), we can get easily:
X pE ( ρ ) − As ( ρ ) Y = ξ pE − As1( ρ )
Here, > is stable polynomial. Therefore, As(D) is a
stable system matrix, we can know As1(D) is also a stable
system matrix. Consider the following Lyapunov
function:
V (t , ρ ) =
1 T
z1 (t ) Ps1( ρ ) z1(t )
2
1
V& (t , ρ ) = − z1T (t )Qs1z1(t ) Ps1( ρ )d s1(t )
2
(40)
+ z1T (t ) Ps1( ρ ) Bs1( ρ ) f ( µ (t ))
Ez& ( t ) = XAs ( ρ)Yz ( t ) + XBs ( ρ) f ( µ( t ) ) + Xd s ( t )
where
⎡ I 0⎤
E= ⎢
⎥,
⎣ 0 0⎦
⎡ AS1 0⎤
XAS ( ρ )Y = ⎢
,
I ⎥⎦
⎣ 0
⎡ z1(t ) ⎤
z (t ) = ⎢
⎥,
⎢⎣ z2 (t )⎥⎦
(41)
(45)
(46)
(47)
There exists a positive definite matrix Ps1(D) and a
semi-positive definite matrix Qs1satisfying (Lyapunov
equation):
As1T(D)Ps1(D) + Ps1(D) As1(D) = !Qs1
(48)
So, we can rewrite (47) as:
V& (t , ρ ) ≤ − k1V (t , ρ ) + k2
(49)
where, k1 and k2 are exists stable polynomials. We can be
written V(t, D) as following:
V (t , ρ ) ≤
5233
k1
+ V (0, ρ )
k2
(50)
Res. J. Appl. Sci. Eng. Technol., 4(23): 5230-5235, 2012
We conclude that z1 ( t ) is bounded. But with z2 ( t ) is
bounded (from (44)), that :(t) and z(t) is bounded. The
above result is summarized as Theorem 1.
2
y(t)
ym(t)
Theorem 1: For the nonlinear system of (1) and (2), using
the method in this study to design model following
control system, z(t), Rm, :(t) , Rlf , f(:(t)) , Rlf , A(D) ,
Rn×n. d(t) and d0(t) which are all assumed to be bounded,
A(D) is a stable system matrix:
d(t)
1
d 0(t)
0
e(t)
E ( ρ ) z&(t ) = A( ρ ) z(t ) + B( ρ ) f ( µ (t )) + d (t )
-0.6
0
10
20
30
time (sec)
:(t) = C (D)z(t) + d0(t)
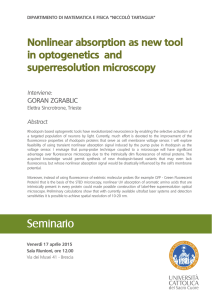
Fig. 1: Responses of the MFCS with time delay
all internal states are bounded if:
C
C
C
CONCLUSION
||f (:(t))|| # " + $ ||:(t)||( (" $ 0, $ $ 0, 0 # (<1);
As (D), R n×n is bounded;
d(t), d0(t) is a stable system matrix.
SIMULATION RESULTS
In this section, an example is presented to
demonstrate the effectiveness and flexibility of the
proposed design approach.
The system with time delays is given by:
⎡ 1
ρ1 0⎤
⎢
⎥
x& ( t ) = ⎢ 0
0 1⎥ x( t ) +
⎢⎣ − 15 − 8 3⎥⎦
⎡ 0 ⎤
⎢
⎥
+ ⎢ 0 ⎥ u( t ) +
⎢⎣1 + ρ1 ⎥⎦
⎡1
0
⎢
⎢ 0 1 + ρ2
⎢⎣ 0
0
⎡ 2⎤
⎢ ⎥
⎢ 1⎥ f ( µ ( t ) ) +
⎢⎣ 2⎥⎦
2⎤
⎥
0⎥ x& ( t )
0⎥⎦
ACKNOWLEDGMENT
This study was financially supported by the
Innovation Program of Shanghai Municipal Education
Commission (12YZ148), the Project-sponsored by SRF
for ROCS, SEM(1568) and the Scientific Research
Foundation of SUES (A-0501-12-01; A-0501-10-023).
The authors would like to thank the editor and the
reviewers for their constructive comments and
suggestions which improved the quality of the study.
⎡ 0 ⎤
⎢
⎥
⎢ d ( t )⎥
⎢⎣ d ( t ) ⎥⎦
y(t) = [2+D3 1 0]x(t) +d0(t)
:(t) = [1 + D4 5 0]x(t)
f ( µ ( t ) ) = 3µ ( t )
We have presented model following control for
nonlinear system with time delay. The illustrative
example and the simulation results show the benefits of
this proposed design methods. Topics for future include:
the discrete control system for the time-delays and the
predictive control of the nonlinear system with time-delay
will be discussed.
REFERENCES
1
5
+ 2µ( t )
1
6
Reference model is given in:
1⎤
⎡ 0
⎡ 0⎤
x&m (t ) = ⎢
⎥ xm (t ) + ⎢ 1⎥ rm (t )
⎣ − 6 − 5⎦
⎣ ⎦
ym (t) = [2 1] xm (t)
The paper discussed study of a MFCS (Model
Following Control System) with time delay (Fig. 1),
calculated with practical example, the result showed that
both output signal y(t) of the system and output signal ym
(t) of the reference model achieved following effect
perfectly and error of output converged to zero gradually,
therefore, validity of the design could be effectively
proven.
Abdellah, B. and E.H. Ahmed, 2011. Delay-dependent
stabilization conditions of controlled positive t-s
fuzzy systems with time varying delay. Int. J. Innov.
Comput. Inform. Con., 7(4): 1533-1547.
Akiyama, T., H. Hattori and S. Okubo, 1998. Design of
the model following control system with time delays.
Trans. IEE Japan, 118-c (4): 497-502.
Han, Q.L., 2004. On robust stability of neutral systems
with time-varying discrete delay and norm-bounded
uncertainty. Automatica, 40(6): 1087-1092.
Nazario, D.R. and A.M. Jaime, 2002. Neural networks to
model dynamic systems with time delays. IE Trans.,
34(3): 313-327.
Shi, Z., J. Yang, J.J. Foshee, W.B. Hartman, S. Tang, et
al., 2001. Photonics for time delay in communication
systems. Opt. Eng., 40(7): 1238-1243.
5234
Res. J. Appl. Sci. Eng. Technol., 4(23): 5230-5235, 2012
Wang, D., S. Wu and S. Okubo, 2009. The state
predictive model following control system for the
linear time delays. Int. J. Automation Comput., 6(2):
186-191.
Wang, D. and S. Okubo, 2008. A design of model
following control system for linear neutral system
with time delays. Trans. Ins. Electr. Eng. Japan,
128(11): 1657-1663.
Wu, S., S. Okubo and D. Wang, 2008. Design of model
following control system for nonlinear descriptor
system in discrete time. Kybernetika, 44(4): 546-556.
Wu, S., D. Wang and S. Okubo, 2011. Control for
Nonlinear Chemical System. Key Eng. Mat.,
467(469): 1450-1455.
Zhang, H.S. and L.H. Xie, 2007. Control and Estimation
of Systems with Input/Output Delays. SpringerVerlag, Berlin.
5235